Изобретение относится к области космической техники и может использоваться для эффективного управления угловым положением космических аппаратов и орбитальных станций.
Известен способ осуществления переориентации космического аппарата (КА) в требуемое конечное угловое положение, включающий вращение КА по назначенным кинетическим траекториям, согласно концепции управления по ускорению [1] Кинематические уравнения желаемого движения космического аппарата при развороте выражаются через кватернион ,
,
где
Λ = Λ(t) кватернион текущего углового положения КА,
Λн= Λ(0) кватернион начального положения КА,
Λк= Λ(Tк) кватернион конечного положения КА (за время разворота Тк).
Символ "О" означает операцию умножения кватернионов, а символ "-" взятие сопряженного кватерниона.
Функциональная схема системы-аналога приведена на фиг. 1, где 1 блок задания начального и конечного положения (БЗНКП), 2 блок задания моментов инерции (БЗМИ), 3 задатчик времени разворота (ЗВР), 4 бесплатформенная инерциальная навигационная система (БИНС), 5 блок датчиков угловых скоростей (ЮДУС), 6 блок определения параметров разворота (БОПР), 7 блок определения требуемой угловой скорости (БОТУС), 8 блок определения моментов управления (БОМУ).
В БИНС 4 по информации об угловой скорости  и начальному угловому положению определяется в процессе интегрирования фактическое угловое положение L(t), которое при сравнении с требуемым конечным угловым положением Λк в БОПР (6) дает информацию L(t) о фазе процесса достижения требуемого положения. Вид назначенных траекторий движения КА содержит в качестве параметра время разворота Tк информация о котором берется с ЗБР (3). По кватерниону разворота L относительно достижения цели управления Λк и по информации об угловой скорости
и начальному угловому положению определяется в процессе интегрирования фактическое угловое положение L(t), которое при сравнении с требуемым конечным угловым положением Λк в БОПР (6) дает информацию L(t) о фазе процесса достижения требуемого положения. Вид назначенных траекторий движения КА содержит в качестве параметра время разворота Tк информация о котором берется с ЗБР (3). По кватерниону разворота L относительно достижения цели управления Λк и по информации об угловой скорости  определяется желаемое изменение кватерниона L и, соответственно, определяется требуемая угловая скорость
определяется желаемое изменение кватерниона L и, соответственно, определяется требуемая угловая скорость  для того, чтобы вращение КА проходило по назначенной траектории. Управляющие моменты определяются БОМУ (8) путем отслеживания требуемой угловой скорости с высокой точностью. При многих достоинствах систем, построенных по принципу управления по ускорению, применительно к управлению пространственным разворотом КА отмеченная система обладает существенным недостатком назначенные траектории должны задаваться аналитически, а, следовательно, движение по ним не обеспечивает минимизацию расхода топлива на реализацию разворота. Более того, не любая назначенная траектория может быть реализована фактически в силу ограниченности управляющих моментов
для того, чтобы вращение КА проходило по назначенной траектории. Управляющие моменты определяются БОМУ (8) путем отслеживания требуемой угловой скорости с высокой точностью. При многих достоинствах систем, построенных по принципу управления по ускорению, применительно к управлению пространственным разворотом КА отмеченная система обладает существенным недостатком назначенные траектории должны задаваться аналитически, а, следовательно, движение по ним не обеспечивает минимизацию расхода топлива на реализацию разворота. Более того, не любая назначенная траектория может быть реализована фактически в силу ограниченности управляющих моментов  возможностями системы исполнительных органов:
возможностями системы исполнительных органов:  .
.
Ближайшим по технической сущности аналогом является способ управления переориентацией динамически симметричного КА, описанный в работе [2] и включающий определение параметров разворота, формирование и с заданного момента времени приложение разгонного импульса, определение фактического кинетического момента КА и сравнение его с расчетным значением, требуемым для приведения КА в заданное конечное угловое положение (Λк) формирование и приложение тормозного импульса.
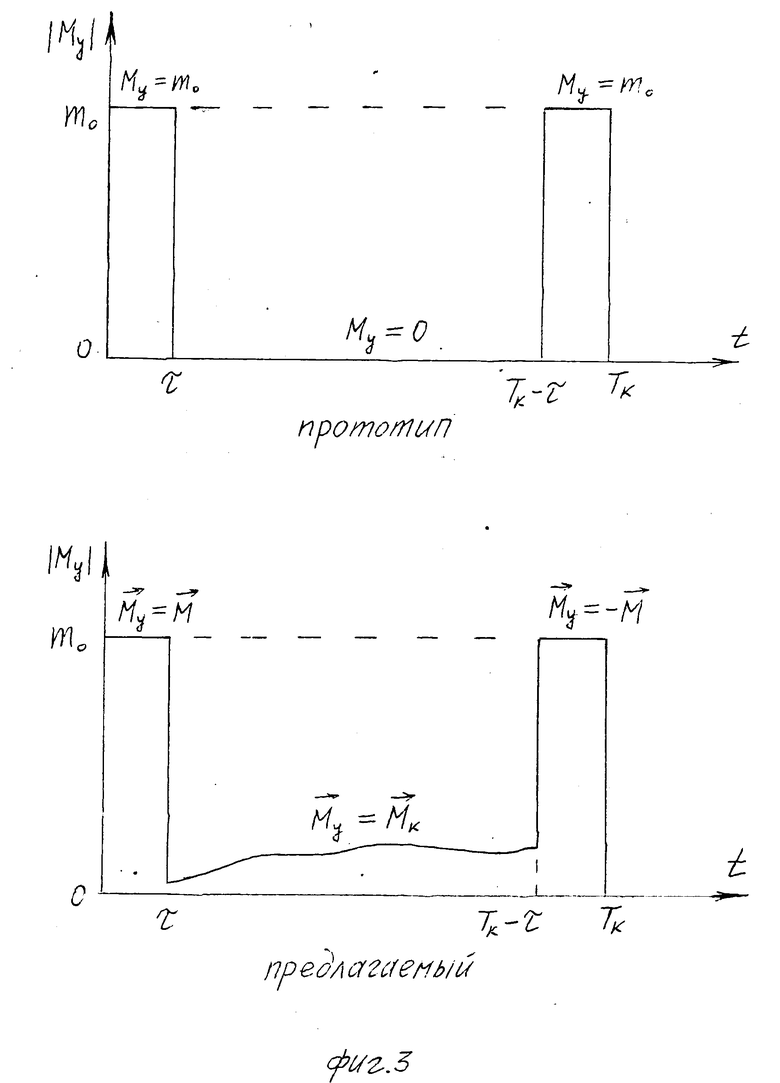
При этом способе разворота предполагается, что космический аппарат движется по коническим траекториям, совершая при этом регулярную процессию. Движение состоит из участков, где действует минимальный момент m0 (участки разгона и торможения КА) и участка свободного движения, на котором управляющий момент равен нулю.
Определяющими характеристиками процесса разворота являются время разгона (торможения) τ и время свободного движения tсв которые вычисляются по соотношениям: ,
,
где
J 0,5(Jx + Jy) экваториальный момент инерции КА,
m0 величина максимального момента управления,
Tк время разворота,
Ψ угол разворота.
Управляющие моменты формируются на участках разгона и торможения исходя из выражения ,
,
где: направление разворота (направление кинетического момента в инерциальном базисе),
направление разворота (направление кинетического момента в инерциальном базисе),
Λн кватернион начального положения,
Λ кватернион текущего положения.
Знак "+" соответствует участку разгона, а знак "-" участку торможения. Вектор разворота  однозначно определяется начальным Λн и конечным Λк положениями КА.
однозначно определяется начальным Λн и конечным Λк положениями КА.
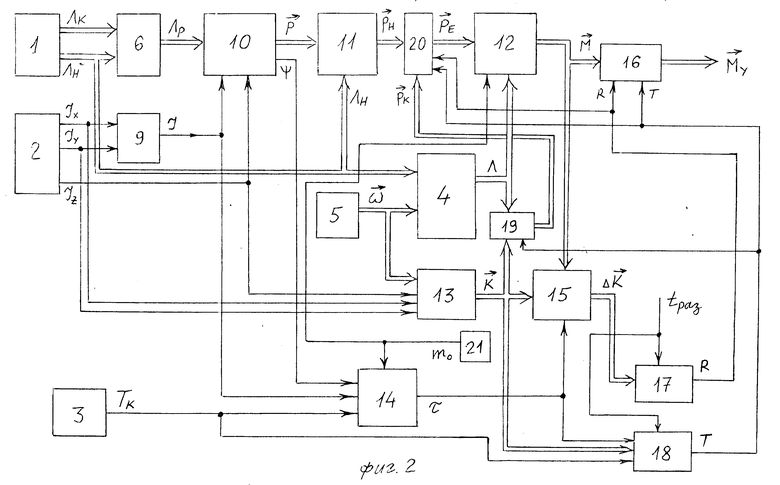
Функциональная структурная схема системы-прототипа представлена на фиг. 2, где 1 блок задатчиков начального и конечного положения КА (БЗНКП), 2 - блок задатчиков моментов инерции (БЗМИ), 3 задатчик времени разворота (ЗВР), 4 бесплатформенная инерциальная навигационная система (БИНС), 5 блок датчиков угловых скоростей (БДУС), 6 блок определения параметров разворота (БОПР), 9 блок определения экваториального момента инерции (БОЭМИ), 10 - блок определения вектора разворота (БОВР), 11 блок определения направления разгонного импульса (БОНРИ), 12 блок формирования вектора момента (БФВМ), 13 блок определения кинетического момента (БОКМ), 14 блок определения времени разгона (торможения) (БОВРТ), 15 блок определения отклонения кинетического момента от расчетного (БООКМ), 16 блок формирования разгонного и тормозного импульсов (БФРТИ), 17 блок формирования команды на разгон (БФКР), 18 блок формирования команды на торможение (БФКТ), 19 блок определения направления тормозного импульса (БОНТИ), 20 блок определения направления разворота (БОНР), 21 задатчик максимальной величины управляющего момента (ЗМВУМ), при этом выход задания начального углового положения БЭНКП связан с входом ввода параметров начального углового положения БОПР, с входом ввода начальных условий БИНС и с входом ввода параметров углового положения БОНРИ, выход задания параметров конечного углового положения БЭНКП связан с входом ввода параметров конечного углового положения БОПР, первый выход задания момента инерции вокруг поперечной оси БЗМИ связан с первым входом БОЭМИ и с первым входом ввода моментов инерции БОКМ, второй выход задания момента инерции вокруг поперечной оси БЗМИ связан со вторым входом БОЭМИ и со вторым входом ввода моментов инерции БОКМ, выход задания момента инерции вокруг продольной оси БЗМИ связан с входом ввода момента инерции вокруг продольной оси БОВР и с третьим входом ввода моментов инерции БОКМ, выход ЭВР связан с входом ввода времени разворота БОВРТ, выход БИНС связан с входом ввода текущего углового положения БФВМ и с входом ввода параметров углового положения БОНТИ, выход ВДУС связан с входом ввода вектора угловой скорости БИНС и с входом ввода вектора угловой скорости БОКМ, выход БОЭМИ, связан с входом ввода момента инерции вокруг поперечной оси БОВР, и с входом ввода момента инерции БОВРТ, выход БОНРИ связан с входом ввода вектора разворота для разгонного импульса БОНР, выход БФВМ связан с входом ввода потребного момента управления к вым входом БОРТИ, выход БОКМ связан с входом ввода кинетического момента БООКМ и с аналогичным входом БОНТИ, выход БОВРТ связан с третьим с входом ввода времени разгона БООКМ, выход БООКМ связан с входом БФКР, выход наличия участка разгона БФКР связан с входом разрешения выдачи разгонного импульса БФРТИ и с входом коммутации БОНР, выход БОНТИ связан с входом ввода вектора разворота для тормозного импульса БОНР, выход БОНР связан с входом ввода направления разворота БФВМ, выход ЭМВУМ связан с третьим с входом ввода величины потребного момента управления БФВМ и с входом ввода максимального момента управления БОВРТ.
Работает система-прототип следующим образом.
По начальному Λн и конечному Λк положениям БОПР 6 определяет кватернион разворота Λp по выражению:  Одновременно БОЭМИ 9 вычисляет величину J. По данной информации в БОВР 10 определяется направление расчетного кинетического момента
Одновременно БОЭМИ 9 вычисляет величину J. По данной информации в БОВР 10 определяется направление расчетного кинетического момента  (вектор разворота) и угол разворота Ψ По времени разворота Tк, углу разворота J и экваториальному моменту инерции J БОВРТ 14 определяется время разгона (торможения) t
(вектор разворота) и угол разворота Ψ По времени разворота Tк, углу разворота J и экваториальному моменту инерции J БОВРТ 14 определяется время разгона (торможения) t
В БОНРИ 11 вычисляется направление разворота  .
.
Этот вектор неподвижен в инерциальной системе координат. По информации БИНС 4 определяется направление требуемого кинетического момента  в связанной системе координат. С момента поступления команды на разворот: tразв "1" к КА прикладывается разгонный импульс (R "1").
в связанной системе координат. С момента поступления команды на разворот: tразв "1" к КА прикладывается разгонный импульс (R "1").
По угловой скорости  определяемой БДУС 5 и моментам инерции КА в БОКМ 13 вычисляется фактический кинетический момент К: В БООКМ 15 вычисляется рассогласование
определяемой БДУС 5 и моментам инерции КА в БОКМ 13 вычисляется фактический кинетический момент К: В БООКМ 15 вычисляется рассогласование .
.
Управляющий момент  прикладывается до момента времени, когда
прикладывается до момента времени, когда  после чего начинается участок свободного движения (R "0"; Т "0"), на котором управляющий момент отсутствует. Через время Tк- τ с начала разворота в БФКТ 18 формируется сигнал Т "1", по которому в БОНТИ 19 фиксируется фактическое направление вектор разворота
после чего начинается участок свободного движения (R "0"; Т "0"), на котором управляющий момент отсутствует. Через время Tк- τ с начала разворота в БФКТ 18 формируется сигнал Т "1", по которому в БОНТИ 19 фиксируется фактическое направление вектор разворота ,
,
где:
Λт кватернион, определяющий угловое положение КА на момент начала торможения,
и к КА прикладывают управляющий момент  , т.е. тормозной импульс. В момент времени, когда
, т.е. тормозной импульс. В момент времени, когда  разворот КА будет завершен. Система готова к следующему развороту.
разворот КА будет завершен. Система готова к следующему развороту.
Недостатком способа и системы прототипа является низкая точность разворота в случае несимметричного КА и при разворотах на большие углы, так как определение вектора разворота не учитывает действия динамических эффектов и внешних возмущающих моментов, которые имеют место при реальных программных разворотах КА.
Техническим результатом настоящего изобретения является существенное повышение точности разворота фактически несимметричного КА при относительно низких затратах топлива.
Указанный технический результат достигается тем, что в предлагаемом способе управления программным разворотом КА, включающем определение параметров разворота, формирование и с заданного момента времени приложение разгонного импульса, определение фактического кинетического момента КА и сравнение его с расчетным значением, требуемым для приведения КА в заданное конечное угловое положение, формирование и приложение тормозного импульса, отличающийся тем, что производят фиксацию в инерциальном базисе расчетного значения вектора кинетического момента, определяемого методом последовательных приближений с учетом величины отклонения прогнозируемого углового положения фактически несимметричного КА от заданного конечного положения, непрерывно производят измерение параметров углового движения КА и с момента равенства фактического кинетического момента расчетному значению формируют и прикладывают к корпусу КА управляющий момент ,
,
где: фактический вектор кинетического момента КА,
фактический вектор кинетического момента КА, расчетное значение вектора кинетического момента,
расчетное значение вектора кинетического момента,
Δt период квантования (Δt = const) до тех пор, пока время на доворот КА до конечного углового положения (τд) не станет равным времени гашения текущего кинетического момента (τг).
Указанный технический результат достигается также тем, что в систему управления программным разворотом КА, содержащую блок задатчиков начального и конечного положений КА, блок задатчиков моментов инерции, задатчик времени разворота, бесплатформенную инерциальную навигационную систему, блок датчиков угловых скоростей, блок определения параметров разворота, блок определения экваториального момента инерции, блок определения вектора разворота, блок определения направления разгонного импульса, блок формирования вектора момента, блок определения кинетического момента, блок определения времени разгона-торможения, блок определения отклонения кинетического момента от расчетного, блок формирования разгонного и тормозного импульсов, блок формирования команды на разгон, блок формирования команды на торможение, блок определения направления тормозного импульса, блок определения направления разворота, задатчик максимальной величины управляющего момента, при этом выход задания начального углового положения блока задатчиков начального и конечного положений КА связан с входом ввода параметров начального углового положения блока определения параметров разворота, с входом ввода начальных условий бесплатформенной инерциальной навигационной системой и с входом ввода параметров углового положения блока определения направления разгонного импульса, выход задания параметров конечного углового положения блока задатчиков начального и конечного положений КА связан с входом ввода параметров конечного углового положения блока определения параметров разворота, первый выход задания момента инерции вокруг поперечной оси блока задатчиков момента инерции связан с первым входом блока определения экваториального момента инерции и с первым входом ввода моментов инерции блока определения кинетического момента, второй выход задания момента инерции вокруг поперечной оси блока задатчиков моментов инерции связан с вторым входом блока определения экваториального момента инерции и со вторым входом ввода моментов инерции блока определения кинетического момента, выход задания момента инерции вокруг продольной оси блока задатчиков моментов инерции связан с входом ввода момента инерции вокруг продольной оси блока определения вектора разворота и с третьим входом ввода моментов инерции блока определения кинетического момента, выход задатчика времени разворота связан с входом ввода времени разворота блока определения времени разгона торможения, выход бесплатформенной инерциальной навигационной системы связан с входом ввода текущего углового положения блока формирования вектора момента и с входом ввода параметров углового положения блока определения направления тормозного импульса, выход блока датчиков угловых скоростей связан с входом ввода вектора угловой скорости бесплатформенной инерциальной навигационной системы и с входом ввода вектора угловой скорости блока определения кинетического момента, выход блока определения экваториального момента инерции связан с входом ввода момента инерции вокруг поперечной оси блока определения вектора разворота и с входом ввода момента инерции блока определения времени разгона-торможения, выход блока определения направления разгонного импульса связан с входом ввода вектора разворота для разгонного импульса блока определения направления разворота, выход блока формирования вектора момента связан с входом ввода потребного момента управления блока определения отклонения кинетического момента от расчетного и с входом ввода потребного момента управления блока формирования разгонного и тормозного импульсов, выход блока определения кинетического момента связан с входом ввода кинетического момента блока определения отклонения кинетического момента от расчетного и с аналогичным входом блока определения направления тормозного импульса, выход блока определения времени разгона торможения связан с входом ввода времени разгона блока определения отклонения кинетического момента от расчетного, выход блока определения отклонения кинетического момента от расчетного связан с входом блока формирования команды на разгон, выход наличия участка разгона блока формирования команды на разгон связан с входом разрешения выдачи разгонного импульса блока формирования разгонного и тормозного импульса и с входом коммутации блока определения направления разворота, выход блока определения направления тормозного импульса связан с входом ввода вектора разворота для тормозного импульса блока определения направления разворота, выход блока определения направления разворота связан с входом ввода направления разворота блока формирования вектора момента, выход задатчика максимальной величины управляющего момента связан с входом ввода величины потребного момента управления блока формирования вектора момента и с входом ввода максимального момента управления блока определения времени разгона-торможения, отличающаяся тем, что в нее введены блок обновления параметров разворота, блок прогнозирования эйлерова движения КА, блок коррекции параметров разворота, блок формирования команды на фиксацию вектора разворота, блок фиксации вектора разворота, блок формирования корректирующего момента, блок суммирования управляющего момента, блок формирования команды на свободное движение, блок определения параметров доворота, блок формирования времени на доворот КА до конечного углового положения, блок формирования времени гашения текущего кинетического момента, блок формирования сигнала об окончании разворота, блок выделения команды на торможение, при этом выход задания начального углового положения блока задатчиков начального и конечного положений КА связан с входом ввода начального углового положения блока прогнозирования эйлерова движения КА, выход задания параметров конечного углового положения блока задатчиков начального и конечного положений КА связан с входом ввода требуемого углового положения блока прогнозирования эйлерова движения КА, с аналогичными входами блока коррекции параметров разворота и блока определения параметров доворота, первый выход задания момента инерции вокруг поперечной оси блока задатчиков моментов инерции связан в первым входом ввода моментов инерции блока прогнозирования эйлерова движения КА, второй выход задания момента инерции вокруг поперечной оси блока задатчиков моментов инерции связан со вторым входом ввода моментов инерции блока прогнозирования эйлерова движения КА, выход задания момента инерции вокруг продольной оси блока задатчиков моментов инерции связан с третьим входом блока определения экваториального момента инерции с третьим входом ввода моментов инерции блока прогнозирования эйлерова движения КА, выход задатчика времени разворота связан с входом ввода времени разворота блока прогнозирования эйлерова движения КА, выход бесплатформенной инерциальной навигационной системы связан с входом ввода текущего углового положения блока определения параметров доворота, выход блока датчиков угловых скоростей связан с входом ввода вектора угловой скорости блока формирования времени на доворот КА до конечного углового положения, выход блока определения параметров разворота связан с входом ввода исходных параметров разворота блока обновления параметров разворота, выход блока определения экваториального момента инерции связан с входом ввода экваториального момента инерции блока прогнозирования эйлерова движения КА, выход задания вектора разворота блока определения вектора разворота связан с входом ввода вектора разворота блока прогнозирования эйлерова движения КА и входом задания вектора разворота блока фиксации вектора разворота, выход задания угла разворота блока определения вектора разворота связан с входами ввода угла разворота блока прогнозирования эйлерова движения КА и блока фиксации вектора разворота, выход блока определения кинетического момента связан с входом ввода кинетического момента блока формирования времени гашения текущего кинетического момента и с входом блока формирования сигнала об окончании разворота, выход блока определения отклонения кинетического момента от расчетного связан с информационным входом блока формирования корректирующего момента, выход блока формирования разгонного и тормозного импульсов связан с первым входом блока суммирования управляющего момента, выход наличия участка разгона блока формирования команды на разгон связан с входом блока выделения команды на торможение, выход задания момента окончания разгона блока формирования команды на разгон связан с логическим входом блока формирования команды на свободное движение, выход задатчика максимальной величины управляющего момента связан с входом ввода максимального момента управления блока формирования времени гашения текущего кинетического момента, выход блока обновления параметров разворота связан с входом ввода параметров разворота блока определения вектора разворота и входом ввода параметров разворота блока коррекции параметров разворота, выход прогнозируемого углового положения блока прогнозирования эйлерова движения КА связан с входом ввода прогнозируемого углового положения блока коррекции параметров разворота, выход сигнала рассогласования блока прогнозирования эйлерова движения КА связан с входом блока формирования команды на фиксацию вектора разворота, выход блока коррекции параметров разворота связан с входом ввода скорректированных параметров разворота блока обновления параметров разворота, выход блока формирования команды на фиксацию вектора разворота связан с входом разрешения итераций блока обновления параметров разворота и со стробирующим входом блока фиксации вектора разворота, выход зафиксированного вектора разворота блока фиксации вектора разворота связан с входом задания расчетного вектора разворота блока определения направления разгонного импульса, выход зафиксированного угла разворота блока фиксации вектора разворота связан с входом задания угла разворота блока фиксации определения времени разгона-торможения, выход блока формирования корректирующего момента связан с вторым входом блока суммирования управляющего момента, выход блока формирования команды на свободное движение связан с управляющим входом блока формирования корректирующего момента и входом наличия участка свободного движения блока выделения команды на торможение, выход блока определения параметров доворота связан с входом задания параметров доворота блока формирования времени на доворот КА до конечного углового положения, выход блока формирования времени на доворот КА до конечного углового положения связан с входом задания времени на доворот блока формирования команды на свободное движение, выход блока формирования времени гашения текущего кинетического момента связан с входом задания времени гашения кинетического момента блока формирования команды на свободное движение, выход блока формирования сигнала об окончании разворота связан с входом наличия разворота блока выделения команды на торможение, выход блока выделения команды на торможение связан со стробирующим входом блока определения направления тормозного импульса, с входом разрешения выдачи тормозного импульса блока формирования разгонного и тормозного импульсов, и с входом коммутации направления торможения блока определения направления разворота.
Указанный технический результат может быть достигнут также тем, что в системе управления программным разворотом КА блок формирования корректирующего момента выполнен в виде генератора гармонических сигналов, блока определения углового положения КА в орбитальной системе отсчета, блока определения направления на Землю, блока формирования попарных произведений, блока умножения на гравитационную постоянную, блока формирования гравитационного момента, блока формирования следящего момента, сумматора и коммутатора, при этом выход генератора гармонических сигналов связан с входом задания параметров орбитального движения блока определения углового положения КА в орбитальной системе отсчета, вход задания текущего углового положения блока определения углового положения КА в орбитальной системе отсчета связан с выходом бесплатформенной инерциальной навигационной системы, выход блока определения углового положения КА в орбитальной системе отсчета связан с входом блока определения направления на Землю, выход которого связан с входом блока формирования попарных произведений, выход которого связан с входом блока умножения на гравитационную постоянную, выход которого связан с входом ввода попарных произведений блока формирования гравитационного момента, первый вход задания моментов инерции блока формирования гравитационного момента связан с первым выходом задания момента инерции вокруг поперечной оси блока задатчиков моментов инерции, второй вход задания моментов инерции блока формирования гравитационного момента связан с вторым выходом задания момента инерции вокруг поперечной оси блока задатчиков моментов инерции, третий вход задания моментов инерции блока формирования гравитационного момента связан с выходом задания момента инерции вокруг продольной оси блока задатчиков моментов инерции, выход блока формирования гравитационного момента связан с первым входом сумматора, вход блока формирования следящего момента связан с выходом блока определения отклонения кинетического момента от расчетного, выход блока формирования следящего момента связан с вторым входом сумматора, выход сумматора связан с информационным входом коммутатора, управляющий вход коммутатора связан с выходом блока формирования команды на свободное движение.
Суть предлагаемого способа заключается в управлении КА таким образом, чтобы он совершал движение по траектории свободного движения полодии, на которой вектор кинетического момента постоянен. При этом движение КА не будет представлять особой регулярной прецессии (т.к. КА не обладает динамической симметрией) и вектор разворота в этом случае можно найти, применяя метод последовательных приближений.
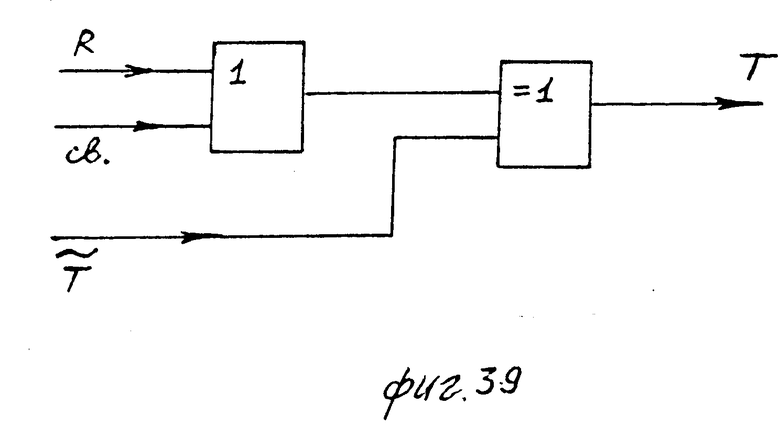
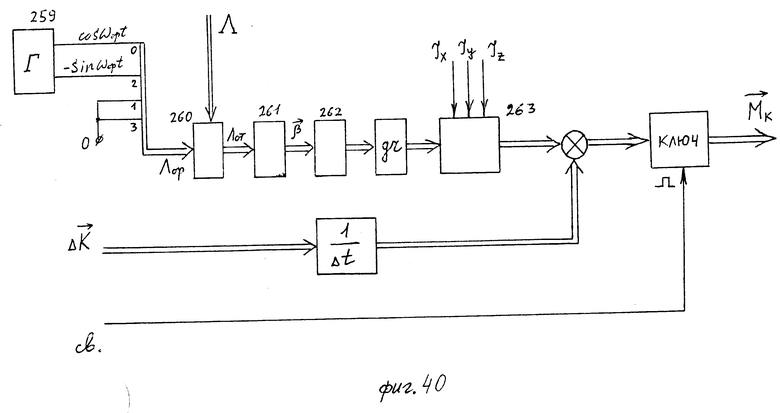
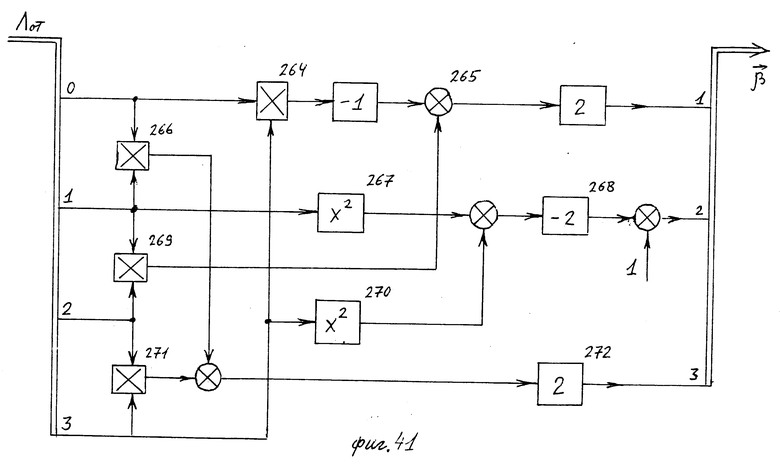
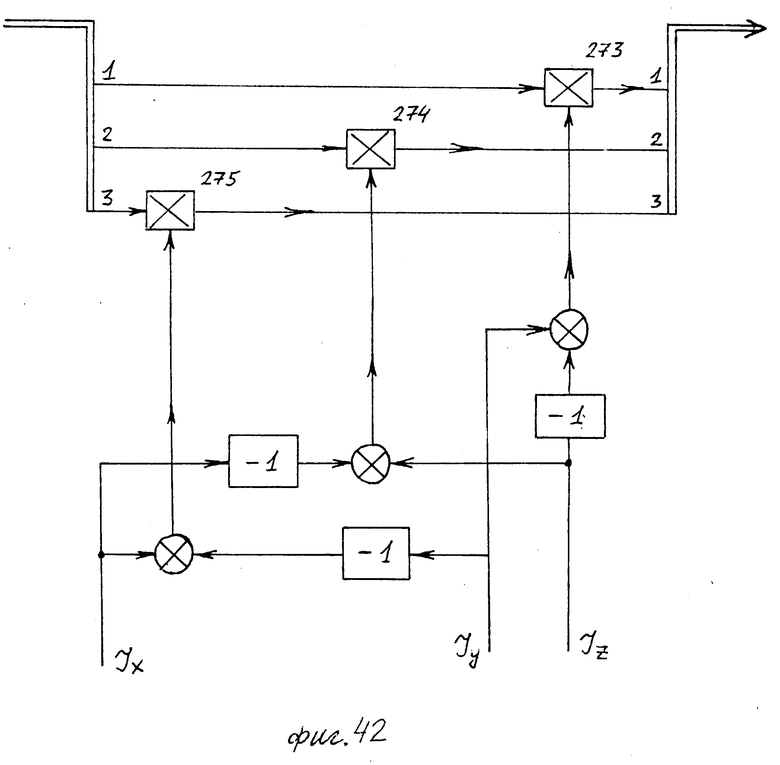
На фиг. 1 показана функциональная схема системы-аналога; на фиг. 2 - функциональная схема системы прототипа; на фиг. 3 временные диаграммы для системы-прототипа и предлагаемой системы; на фиг. 4 функциональная схема предлагаемой системы; на фиг. 5 схема реализации БОПР 6 и БОПД 30; на фиг. 6 схема определения обратного кватерниона; на фиг. 7 схема умножения кватернионов; на фиг. 8 схема реализации БОЭМИ 9; на фиг. 9 схема реализации БОВР 10; на фиг. 10 схема определения параметров α33, Φ, Ω (реализация блока 94); на фиг. 11 схема реализации блоков 120, 121; на фиг. 12 схема реализации блока 97; на фиг. 13 схема реализации БПЭД 23; на фиг. 14 схема формирования начальной угловой скорости; на фиг. 15 схема реализации блоков 159, 262; на фиг. 16 схема реализации блока 158; на фиг. 17 схема реализации БКПР 24; на фиг. 18 схема реализации БФКВР 25; на фиг. 19 схема реализации БФВР 26; на фиг. 20 схема реализации БОНТИ 19; на фиг. 21 схема возведения вектора в квадрат; на фиг. 22 схема реализации БОНР 20; на фиг. 23 схема реализации БОНРИ 11; на фиг. 24 схема реализации БФВМ 12; на фиг. 25 схема умножения вектора на скаляр; на фиг. 26 схема реализации БОКМ 13; на фиг. 27 схема реализации БОВРТ 14; на фиг. 28 схема реализации БООКМ 15; на фиг. 29 схема реализации БФРТИ 16; на фиг. 30 схема реализации БФВД 31; на фиг. 31 схема реализации БФВГКМ 32; на фиг. 32 схема реализации БФКСД 29; на фиг. 33 схема реализации БО6ПР 22; на фиг. 34 схема реализации БФКМ 27; на фиг. 35 схема реализации БСУМ 28; на фиг. 36 - циклограмма процесса разворота КА; на фиг. 37 схема реализации БФКР 17; на фиг. 38 схема реализации БФСОР 33; на фиг. 39 схема реализации БВКТ 34; на фиг. 40 схема реализации БФКМ 27 по пункту 3; на фиг 41 схема определения направления на Землю в связанных осях; на фиг. 42 схема реализации блока формирования гравитационного момента 263; на фиг. 43 схема итераций поиска  для несимметричного тела (КА).
для несимметричного тела (КА).
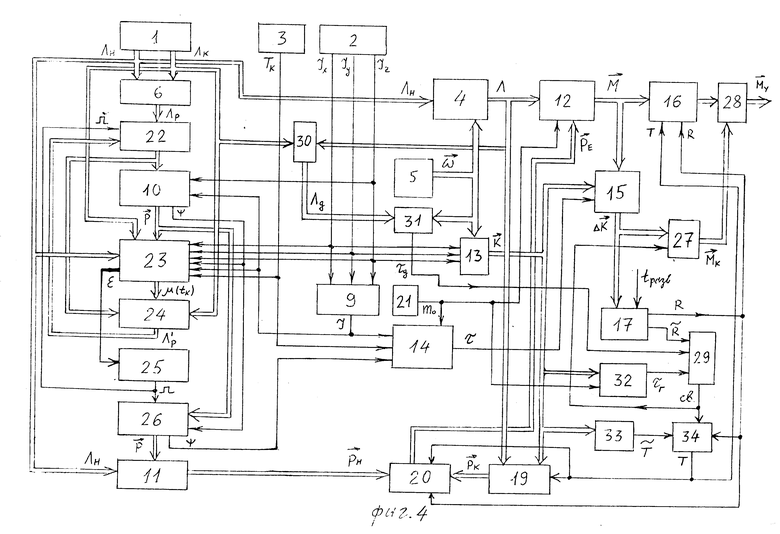
Пример реализации предложенных способа и системы представлен на фиг. 4, где обозначено: 1 блок задания начального и конечного положений (БЗНКП), 2 - блок задания моментов инерции (БЗМИ), 3 задатчик времени разворота (ЗВР), 4 бесплатформенная инерциальная навигационная система (БИНС), 5 блок датчиков угловых скоростей (БДУС), 6 блок определения параметров разворота (БОПР), 9 блок определения экваториального момента инерции (БОЗМИ), 10 - блок определения вектора разворота (БОВР), 11 блок определения направления разгонного импульса (БОНРИ), 12 блок формирования вектора момента (БФВМ), 13 блок определения кинетического момента (БОКМ), 14 блок определения времени разгона (торможения) (БОВРТ), 15 блок определения отклонения кинетического момента от расчетного (БООКМ), 16 блок формирования разгонного и тормозного импульсов (БФРТИ), 17 блок формирования команды на разгон (БФКР), 19 блок определения направления тормозного импульса (БОНТИ), 20 блок определения направления разворота (БОНР), 21 задатчик максимальной величины управляющего момента (ЗМВРУМ), 22 блок обновления параметров разворота (БОбРП), 23 блок прогнозирования эйлерова движения КА (БПЭД), 24 блок коррекции параметров разворота (БКПР), 25 блок формирования команды на фиксацию вектора разворота (БФКФВР), 26 блок фиксации вектора разворота (БФВР), 27 блок формирования корректирующего момента (БФКМ), 28 блок суммирования управляющего момента ((ВСУМ), 29 блок формирования команды на свободное движение (БФКСД), 30 - блок определения параметров доворота (БОПД), 31 блок формирования времени на доворот КА до конечного углового положения (БФВД), 31 блок формирования времени гашения текущего кинетического момента (БФВГКМ), 32 блок формирования сигнала об окончании разворота (БФСОР), 33 блок выделения команды на торможение (БВКТ), при этом выход задания начального углового положения блока задатчиков начального и конечного положений КА связан с входом ввода начального углового положения блока прогнозирования эйлерова движения КА, выход задания параметров конечного углового положения блока задатчиков начального и конечного положений КА связан с входом ввода требуемого углового положения блока прогнозирования эйлерова движения КА, с аналогичными входами блока коррекции параметров разворота и блока определения параметров доворота, первый выход задания момента инерции вокруг поперечной оси блока задатчиков моментов инерции связан с первым входом ввода моментов инерции блока прогнозирования эйлерова движения КА, второй выход задания момента инерции вокруг поперечной оси блока задатчиков моментов инерции связан со вторым входом ввода моментов инерции блока прогнозирования эйлерова движения КА, выход задания момента инерции вокруг продольной оси блока задатчиков моментов инерции связан с третьим входом блока определения экваториального момента инерции и с третьим входом ввода моментов инерции блока прогнозирования эйлерова движения КА, выход задатчика времени разворота связан с входом ввода времени разворота блока прогнозирования эйлерова движения КА, выход бесплатформенной инерциальной навигационной системы связан с входом ввода текущего углового положения блока определения параметров доворота, выход блока датчиков угловых скоростей связан с входом ввода вектора угловой скорости блока формирования времени на доворот КА до конечного углового положения, выход блока определения параметров разворота связан с входом ввода исходных параметров разворота блока обновления параметров разворота, выход блока определения экваториального момента инерции связан с входом ввода экваториального момента инерции блока прогнозирования эйлерова движения КА, выход задания вектора разворота блока определения вектора разворота связан с входом ввода вектора разворота блока прогнозирования эйлерова движения КА и входом задания вектора разворота блока фиксации вектора разворота, выход задания угла разворота блока определения вектора разворота связан с входами ввода угла разворота блока прогнозирования эйлерова движения КА и блока фиксации вектора разворота, выход блока определения кинетического момента связан с входом ввода кинетического момента блока формирования времени гашения текущего кинетического момента и с входом блока формирования сигнала об окончании разворота, выход блока определения отклонения кинетического момента от расчетного связан с информационным входом блока формирования корректирующего момента, выход блока формирования разгонного и тормозного импульсов связан с первым входом блока суммирования управляющего момента, выход наличия участка разгона блока формирования команды на разгон связан с одноименным входом блока выделения команды на торможение, выход задания момента окончания разгона блока формирования команды на разгон связан с логическим входом блока формирования команды на свободное движение, выход задатчика максимальной величины управляющего момента связан с входом ввода максимального момента управления блока формирования времени гашения текущего кинетического момента, выход блока обновления параметров разворота связан с входом ввода параметров разворота блока определения вектора разворота и входом ввода параметров разворота блока коррекции параметров разворота, выход прогнозируемого углового положения блока прогнозирования эйлерова движения КА связан с входом ввода прогнозируемого углового положения блока коррекции параметров разворота, выход сигнала рассогласования блока прогнозирования эйлерова движения КА связан с входом блока формирования команды на фиксацию вектора разворота, выход блока коррекции параметров разворота связан с входом ввода скорректированных параметров разворота блока обновления параметров разворота, выход блока формирования команды на фиксацию вектора разворота связан с входом разрешения итераций блока обновления параметров разворота и со стробирующим входом блока фиксации вектора разворота, выход зафиксированного вектора разворота блока фиксации вектора разворота связан с входом задания расчетного вектора разворота блока определения направления разгонного импульса, выход зафиксированного угла разворота блока фиксации вектора разворота связан с входом задания угла разворота блока определения времени разгона (торможения), выход блока формирования корректирующего момента связан со вторым входом блока суммирования управляющего момента, выход блока формирования команды на свободное движение связан с управляющим входом блока формирования корректирующего момента и входом наличия участка свободного движения блока выделения команды на торможение, выход блока определения параметров доворота связан с входом задания параметров доворота блока формирования времени на доворот КА до конечного углового положения, выход блока формирования времени на доворот КА до конечного углового положения связан с входом задания времени на доворот блока формирования команды на свободное движение, выход блока формирования времени гашения текущего кинетического момента связан с входом задания времени гашения кинетического момента блока формирования команды на свободное движение, выход блока формирования сигнала об окончании разворота связан с входом наличия разворота блока выделения команды на торможение, выход блока выделения команды на торможение связан со стробирующим входом блока определения направления тормозного импульса, с входом разрешения выдачи тормозного импульса блока формирования разгонного и тормозного импульсов, и с входом коммутации направления торможения блока определения направления разворота.
Реализация отдельных блоков и элементов предлагаемой системы выполнена на интегральных схемах и стандартных аналоговых модулях и представлена 5-35, 37-42.
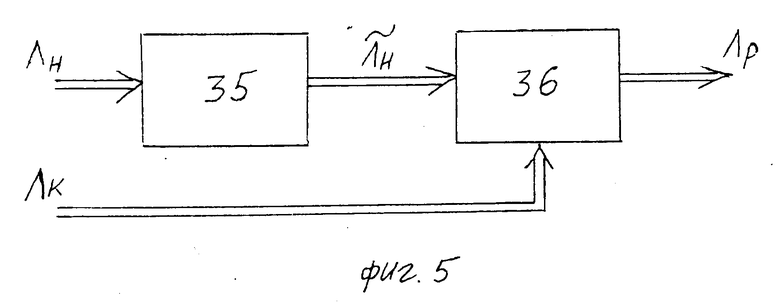
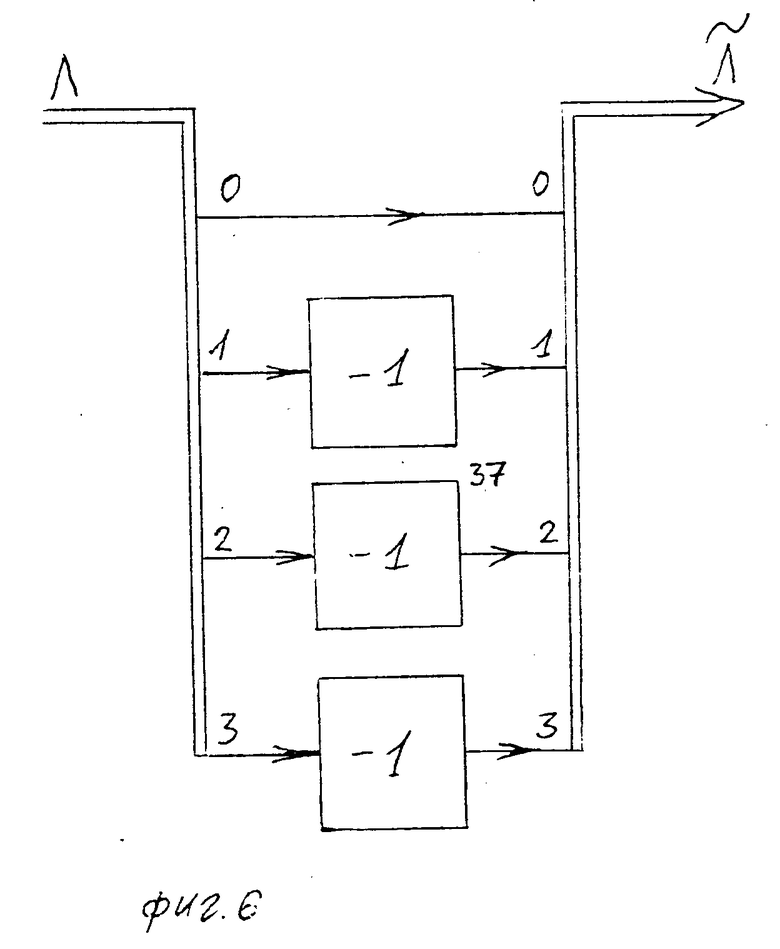
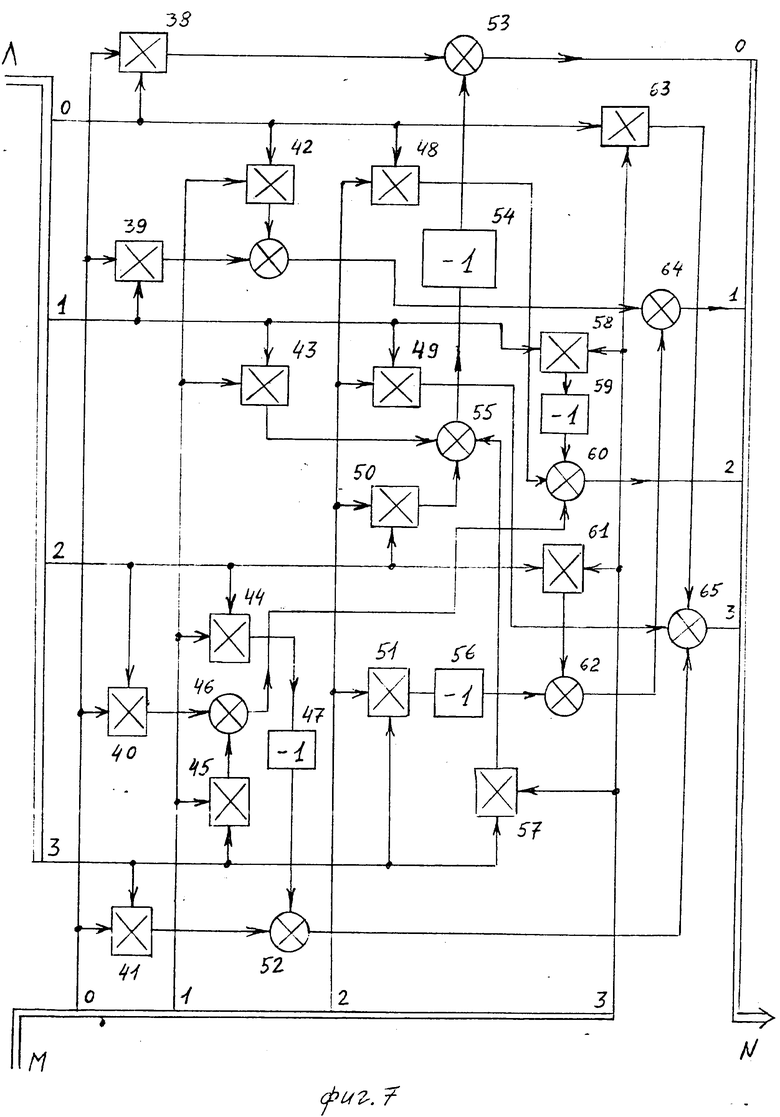
БОПР 6 (фиг. 5) вычисляет кватернион разворота по формуле  и содержит два субблока: 35 блок определения сопряженного кватерниона (фиг. 6) и 36 блок перемножения кватернионов (фиг. 7).
и содержит два субблока: 35 блок определения сопряженного кватерниона (фиг. 6) и 36 блок перемножения кватернионов (фиг. 7).
Блок определения сопряженного кватерниона состоит из трех инверторов, связывающих соответствующие входы и выходы с 1-го по 3-й. Нулевой вход напрямую связан с нулевым выходом.
Блок перемножения кватернионов (36, 106, 193, 194, 203, 204, 212, 213, 215, 216) имеет два входа и один выход. Если Λ первый вход, M второй вход, N выход, то N = Λ ° M
Блок перемножения кватернионов содержит 16 перемножителей, 9 сумматоров и 4 инвертора.
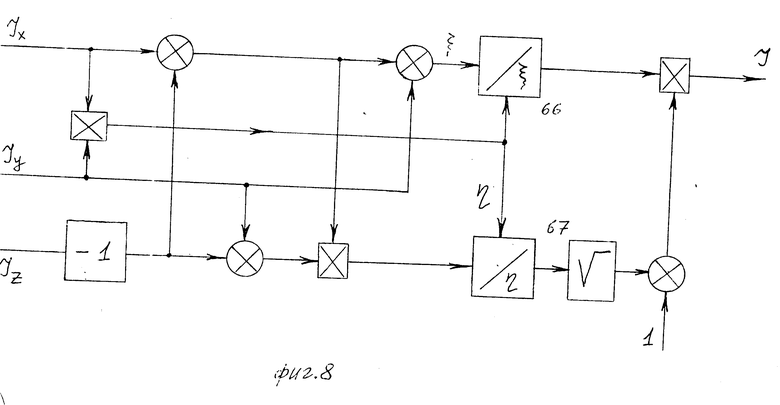
БОЭМИ 9 усредняет моменты инерции вокруг поперечных осей по выражению ,
,
(фиг. 8).
БОВР 10 в зависимости от условий разворота Λp≡ {λ
1) разворот вокруг продольной оси: λ
2) разворот вокруг поперечной оси: λ
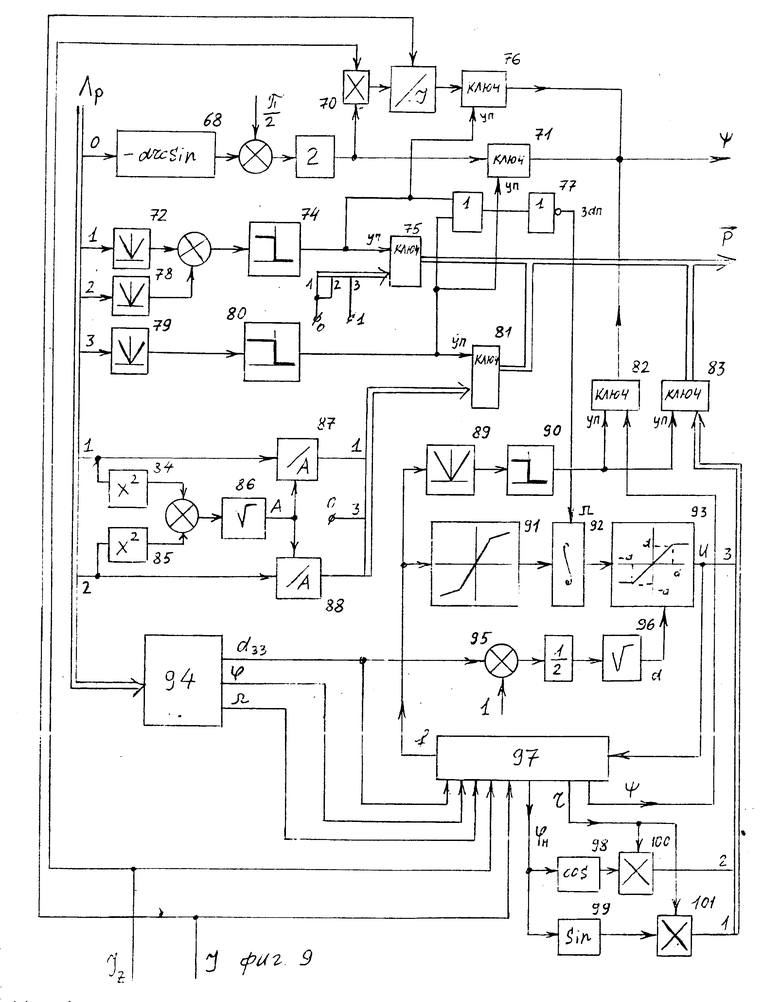
3) косой разворот (фиг. 9).
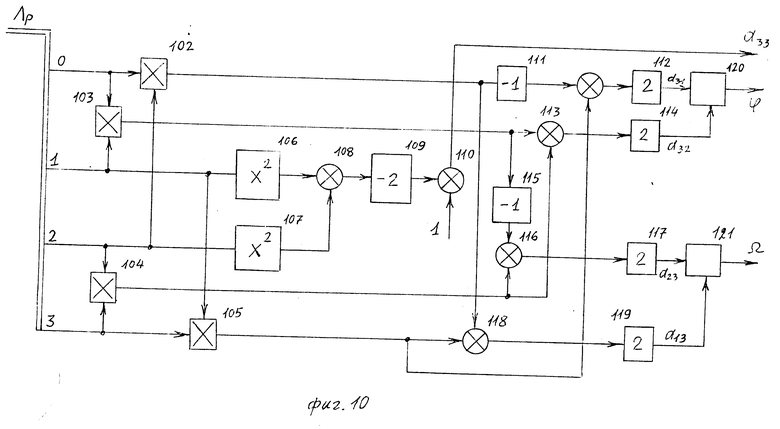
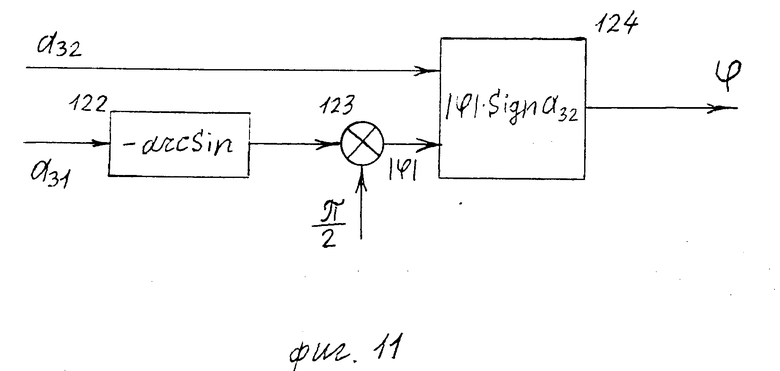
Работа БОВР сводится к следующему. Сигналы λ и угол Ψ, соответствующие варианту 1. Если имеет место вариант 2, то компаратор 80 выдает сигнал управления на ключи 71 и 81 и на выходе БОВР будут значения, соответствующие этому варианту. Если оба варианта отсутствуют, то схема логического отрицания 77 формирует сигнал запуска на интегратор 92 для алгоритмического вычисления вышеуказанных характеристик разворота. Субблоки 91, 92, 94, 97 образуют контур, решающий алгоритмически уравнение f(u) 0. Субблок 94 вычисляет необходимые константы a33, Φ, Ω по схеме фиг. 10; sin Ω = α31; cos Ω = α23;; sin Φ = α32; cos Φ = α31. Для определения углов Φ и Ω применена известная схема умножения переменной на знакомую функцию (фиг. 11).
и угол Ψ, соответствующие варианту 1. Если имеет место вариант 2, то компаратор 80 выдает сигнал управления на ключи 71 и 81 и на выходе БОВР будут значения, соответствующие этому варианту. Если оба варианта отсутствуют, то схема логического отрицания 77 формирует сигнал запуска на интегратор 92 для алгоритмического вычисления вышеуказанных характеристик разворота. Субблоки 91, 92, 94, 97 образуют контур, решающий алгоритмически уравнение f(u) 0. Субблок 94 вычисляет необходимые константы a33, Φ, Ω по схеме фиг. 10; sin Ω = α31; cos Ω = α23;; sin Φ = α32; cos Φ = α31. Для определения углов Φ и Ω применена известная схема умножения переменной на знакомую функцию (фиг. 11).
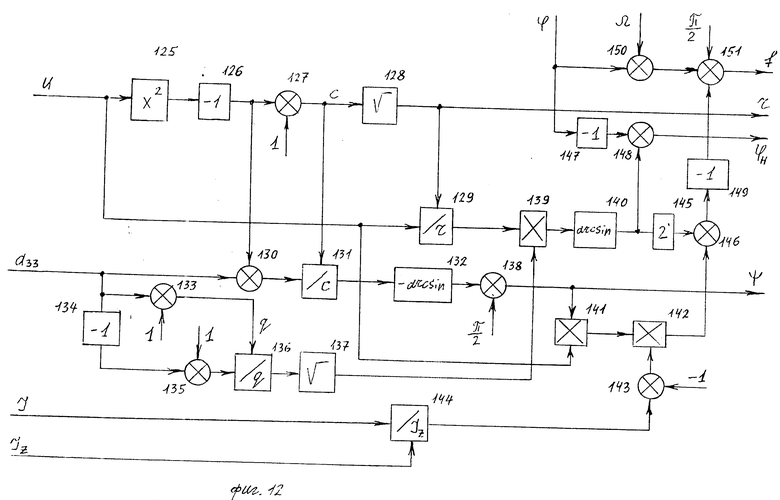
Субблок 121 работает аналогично, но на его выходе будет значение угла W Блок 97 вычисляет собственно функцию f(u) в зависимости от изменяющегося сигнала u ≡ cosθ согласно вычислительной схеме на фиг. 12.
В момент времени, когда f(u) 0; u const (больше не меняется), т.е. решение найдено, компаратор 90 выдает разрешение ключам 82 и 83 на коммутацию выходом J и  с найденным вектором:
с найденным вектором:
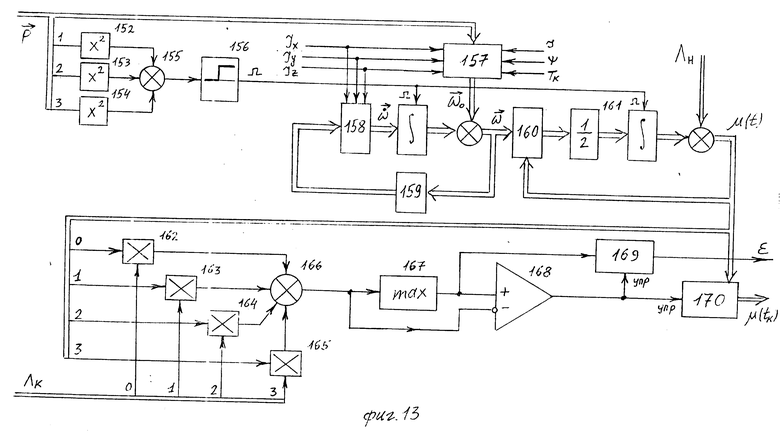
px= r sin Φн; py= r cos Φн; pz= u. БПЭД 23 представляет собой математическую модель вращательного движения твердого тела в случае Эйлера (см. фиг. 13). Начальные условия  - определяются начальным положением и вектором разворота
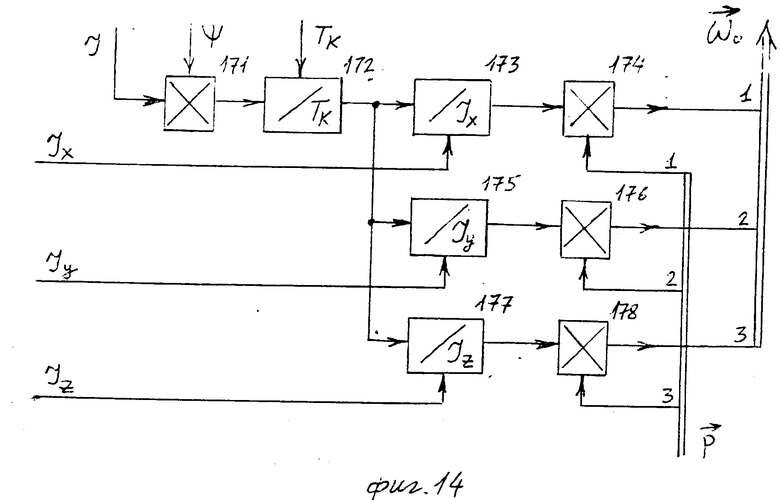
- определяются начальным положением и вектором разворота  а также инерционными характеристиками КА, углом разворота Ψ и временем разворота Tк. Требуемую на начало участка свободного движения угловую скорость определяет блок 157 по значениям найденного вектора разворота согласно схеме фиг. 14.
а также инерционными характеристиками КА, углом разворота Ψ и временем разворота Tк. Требуемую на начало участка свободного движения угловую скорость определяет блок 157 по значениям найденного вектора разворота согласно схеме фиг. 14.
БПЭД состоит из определителя наличия ненулевого вектора разворота (блоки 1+52, 153, 154, 155, 156 на фиг. 13), который выдает импульс запуска интеграторов.
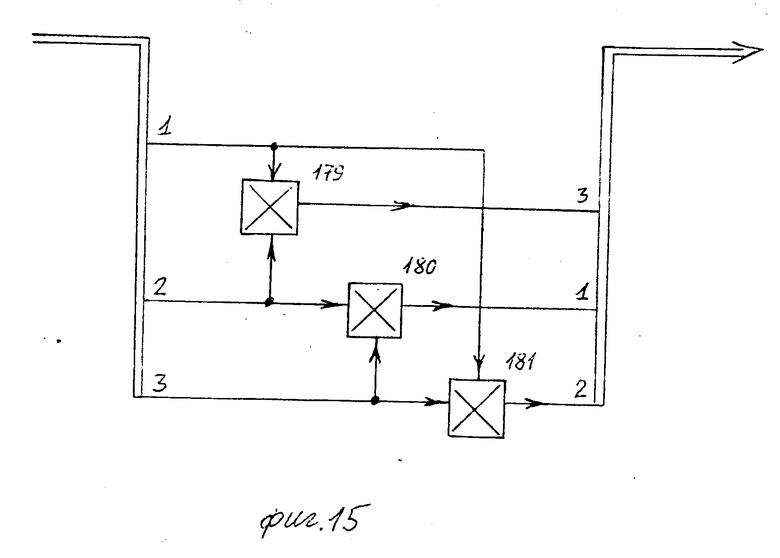
Блоки 158, 159, 160, 161 образуют динамический контур математической модели. Блоки 160, 161 моделируют кинематические уравнения. Блок 159 необходим для формирования попарных произведений компонент угловой скорости вращения КА (фиг. 15), которые входят в левые части динамических уравнений математической модели.
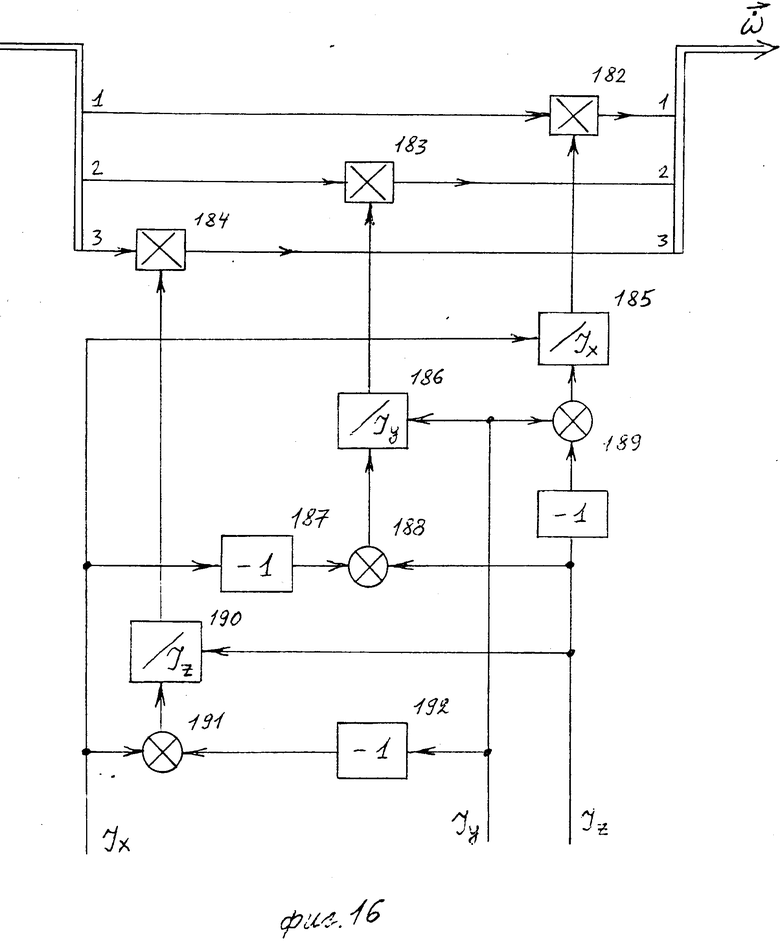
Блок 158 формирует угловое ускорение, согласно схеме фиг. 16. После интегрирования блоком, с учетом начальных условий, получим текущую угловую скорость.
Степень отдаленности моделируемого положения L(t) от конечного Λк определяется блоками 162, 163, 164, 165, 166 по выражению .
.
(фиг. 13).
Блок 167 есть схема отслеживания максимальной величины ε. Блоки 167, 168 совместно формируют управляющий сигнал (логическую единицу) в момент наличия спада e. В этот момент схемы хранения аналоговых сигналов 169 и 170 фиксируют лучшие значения e и m(T).
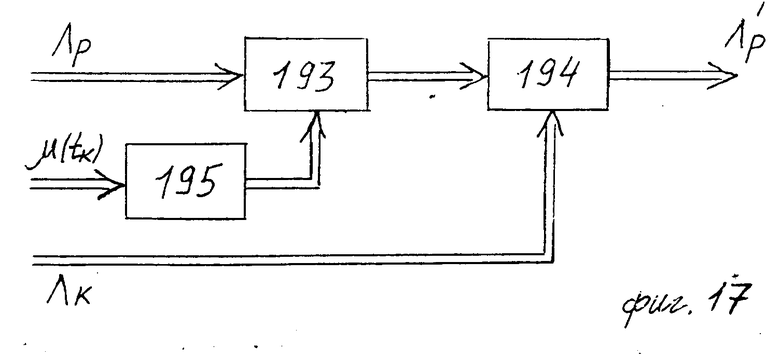
БКПР 28 (фиг. 17) реализует итерации:  . Обратный кватернион
. Обратный кватернион  рассчитывается блоком 195, а блоки 193 и 194 дают соответствующие произведения кватернионов.
рассчитывается блоком 195, а блоки 193 и 194 дают соответствующие произведения кватернионов.
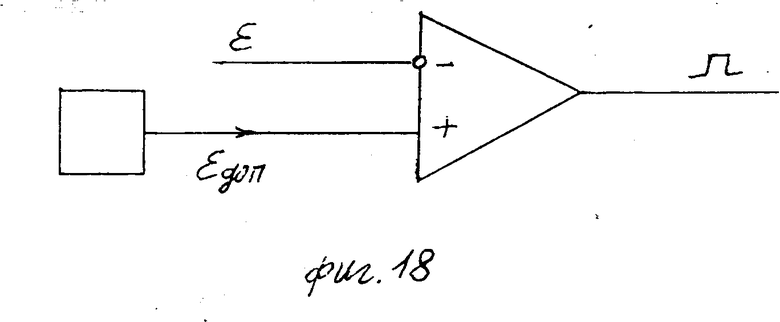
БФКФБР 25 представляет собой компаратор, сравнивающий выдаваемый БПЭД сигнал с допустимым значением εдоп, которое поступает с задатчика допустимой ошибки разворота (фиг. 18). Как только ε ≥ εдоп, логический сигнал на выходе компаратора пропадает и итерационный процесс, реализованный блоками 22, 10, 23, 24, прекращается.
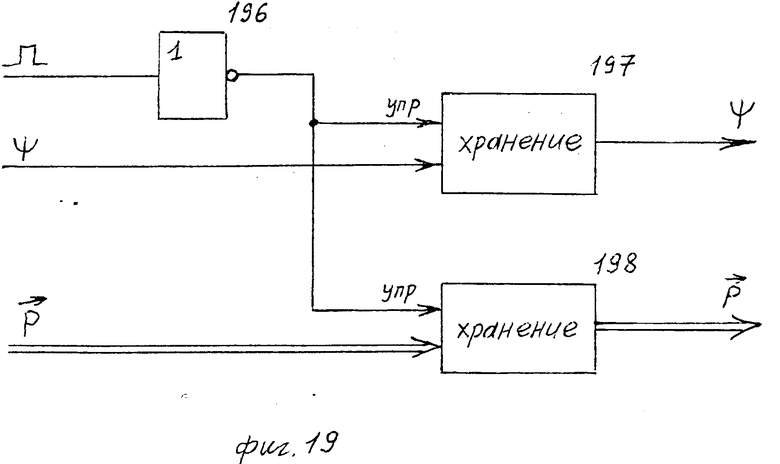
БФВР 26 содержит схему логического отрицания 196 и две схемы хранения угла разворота 197 и вектора разворота 198 см. фиг. 19.
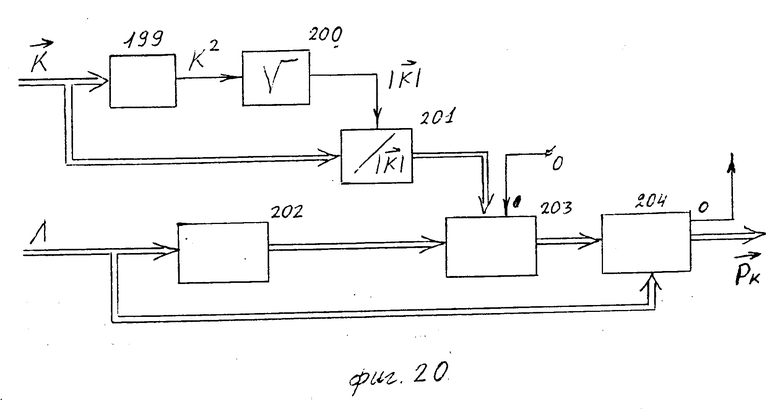
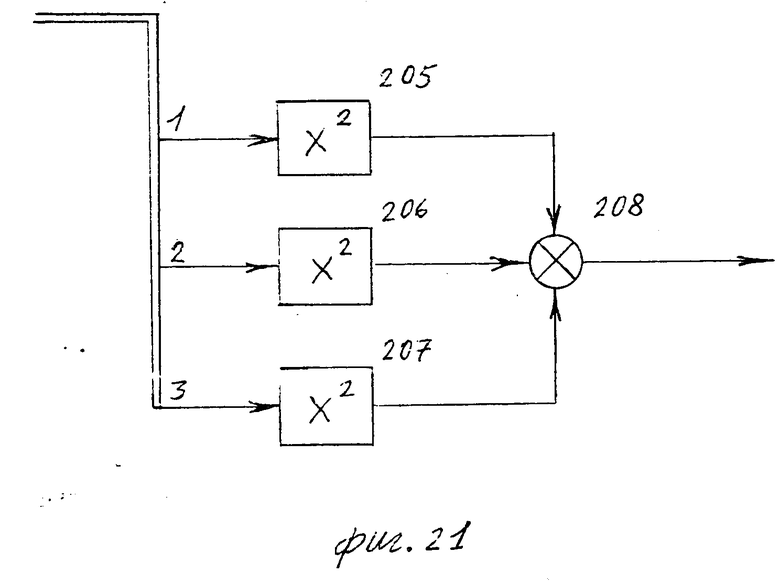
БОНТИ 27 представлен на фиг. 20 и состоит из блока определения квадрата вектора 199 (фиг. 21) и блоков, осуществляющих операции над кватернионами 202, 203, 204. Блоки 199, 202, 201 определяют направление фактического кинетического момента в связанном с КА базисе, а затем это направление пересчитывается из связанного базиса в инерциальный.
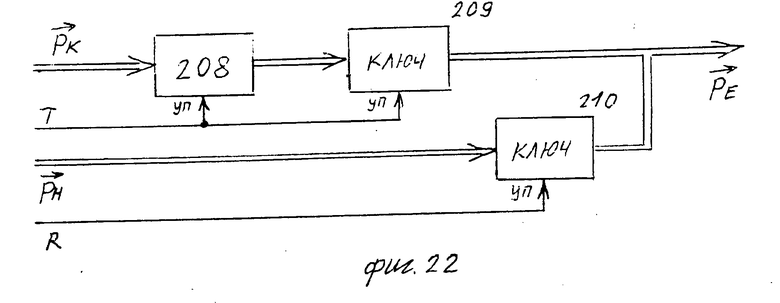
БОНР 28 представлен фигурой 22 и состоит из одного фиксатора 208 (схемы хранения аналоговой информации) и двух ключей 209 и 210, подающих на выход БОВР либо направление разгонного импульса  (если R "1"), либо направление тормозного импульса
(если R "1"), либо направление тормозного импульса  (если Т "1"). Если оба сигнала отсутствуют, то на выходе БОВР установится нулевой вектор.
(если Т "1"). Если оба сигнала отсутствуют, то на выходе БОВР установится нулевой вектор.
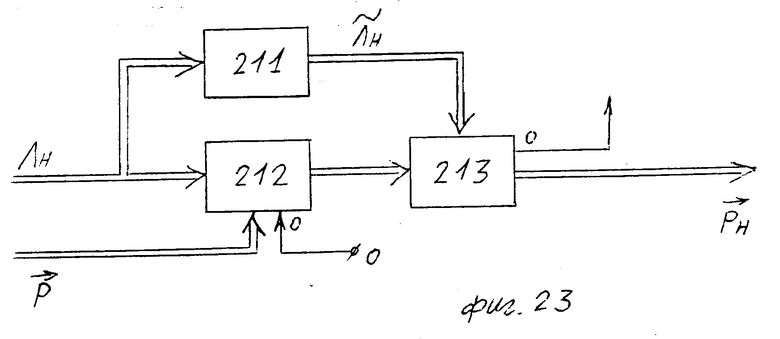
БОНРИ 11 представлен на фиг. 23 и состоит из блока определения кватерниона 211 и двух умножителей кватернионов (блоки 212 и 213).
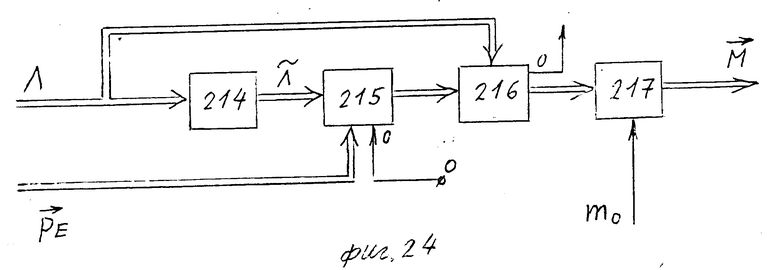
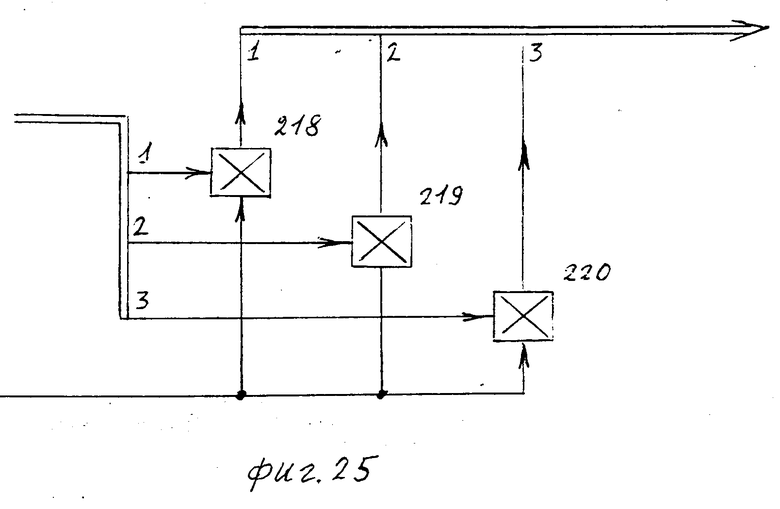
БФВМ 12 вычисляет потребный момент управления, исходя из фактического углового положения и вектора разворота (фиг. 24). Он содержит блок умножения вектора на скаляр (блок 217, фиг. 25), блок обращения кватерниона 214 и блоков умножения кватернионов 215 и 216.
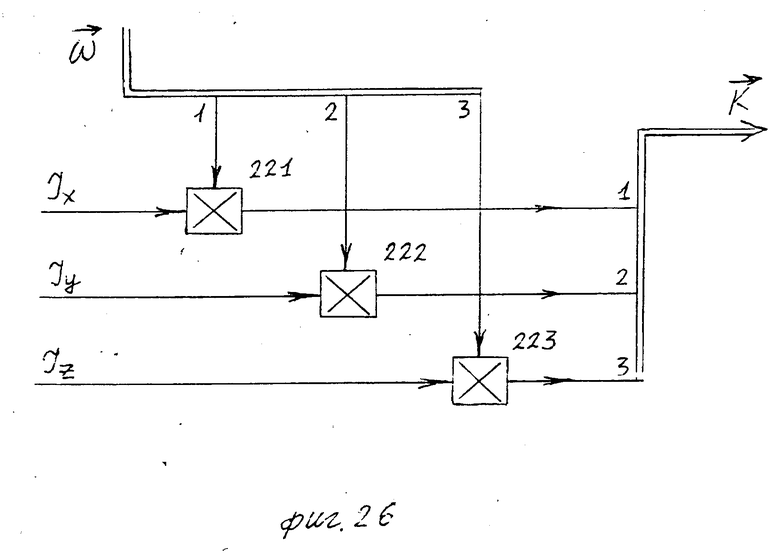
БОКМ 13 представлен фиг. 26 и состоит из трех перемножителей и осуществляет умножение вектора угловой скорости на диагональную матрицу моментов инерции КА.
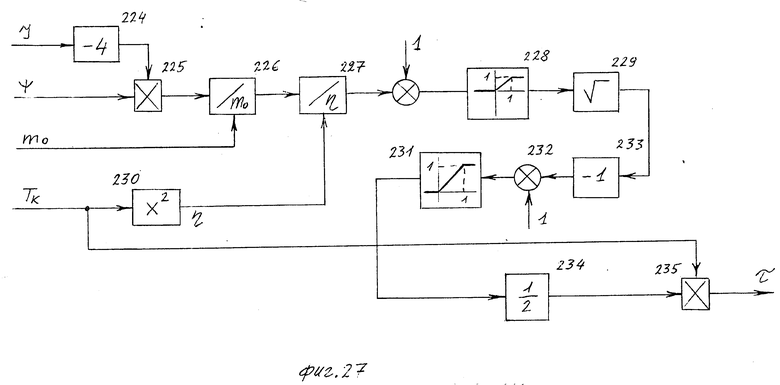
БОВРТ 14 вычисляет время разгона (торможения) τ по вышеуказанному выражению (фиг. 27).
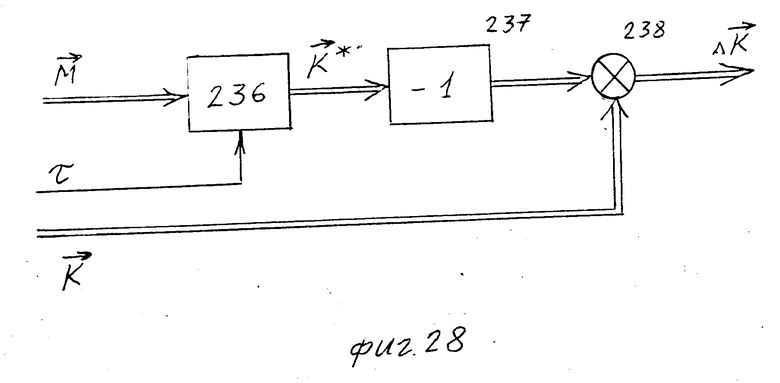
БООКМ 15 содержит блок вычисления расчетного кинетического момента 236 и блока вычитания из фактического значения (блоки 237, 238) см. фиг. 28.
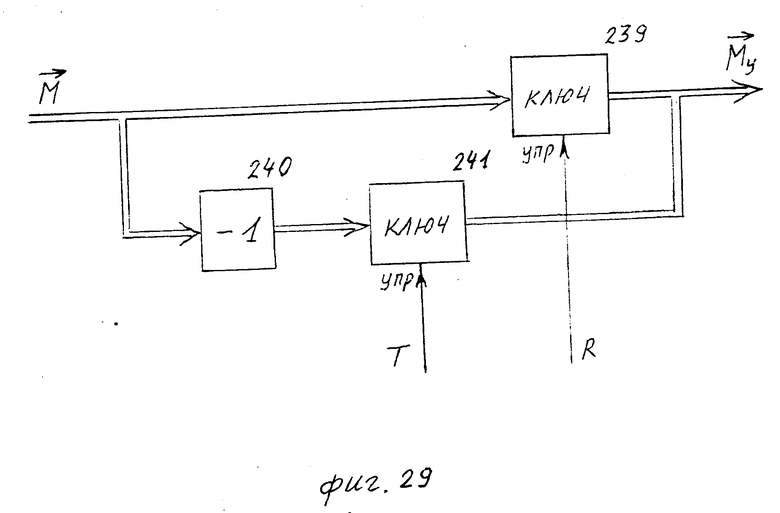
БФРТИ 16 (фиг. 29) состоит из векторного инвертора 240 и двух ключей 239 и 241, коммутирующих с выходом момента. При отсутствии сигналов R и T на выходе БФРТИ будет нулевой вектор.
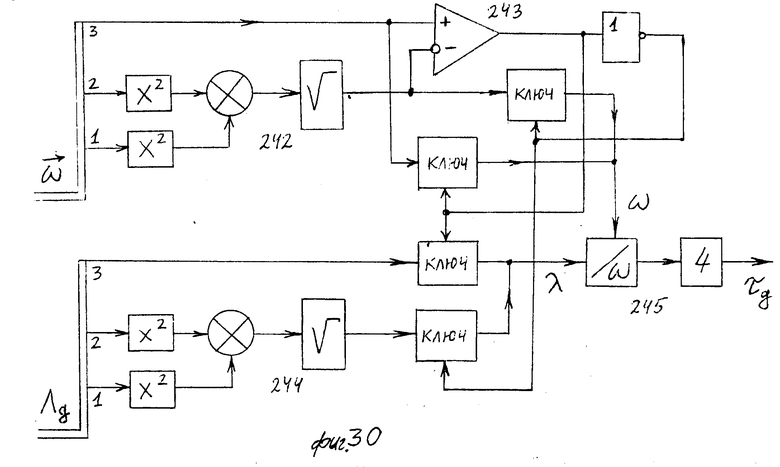
БФВД 31 определяет время доворота КА до конечного положения в предположении, что угловая скорость гасится равномерно (фиг. 30). Компаратор 243 определяет, по какому из двух выражений вычислять:
а) если  , то на выходе компаратора "1" и λ = λд3; ω = ωz;
, то на выходе компаратора "1" и λ = λд3; ω = ωz;
б) если  , то на выходе компаратора "0" и
, то на выходе компаратора "0" и  .
.
Учитывая, что угол доворота мал, можно принять для времени доворота КА τд ≈ 4λ/ω, что вычисляется схемой 245.
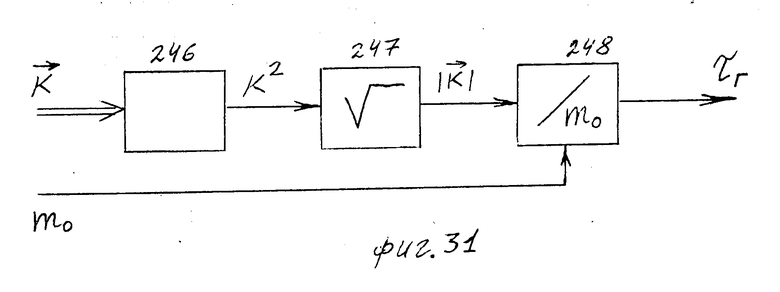
БФВГКМ 32 представлен фигурой 31. Блоки 246, 247 определяют величину K, которая в схеме деления 248 делится на m0, и на ее выходе формируется время гашения текущего кинетического момента τг.
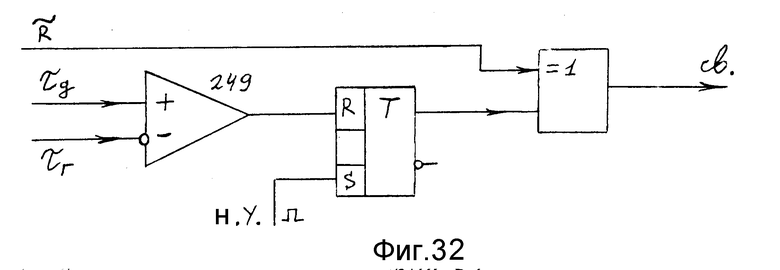
БФКСД 29 формирует логическую "1" на участке свободного движения КА (см. фиг. 32). Выход триггера будет в состоянии "1" до тех пор, пока τд> τг времени гашения момента  В момент времени, когда τд≅ τг схема сравнения 249 сбрасывает триггер в "0" и на выходе формируется сигнал cb "0". Схема "исключающее или" не допускает ситуацию, когда cb "1", при R "1".
В момент времени, когда τд≅ τг схема сравнения 249 сбрасывает триггер в "0" и на выходе формируется сигнал cb "0". Схема "исключающее или" не допускает ситуацию, когда cb "1", при R "1".
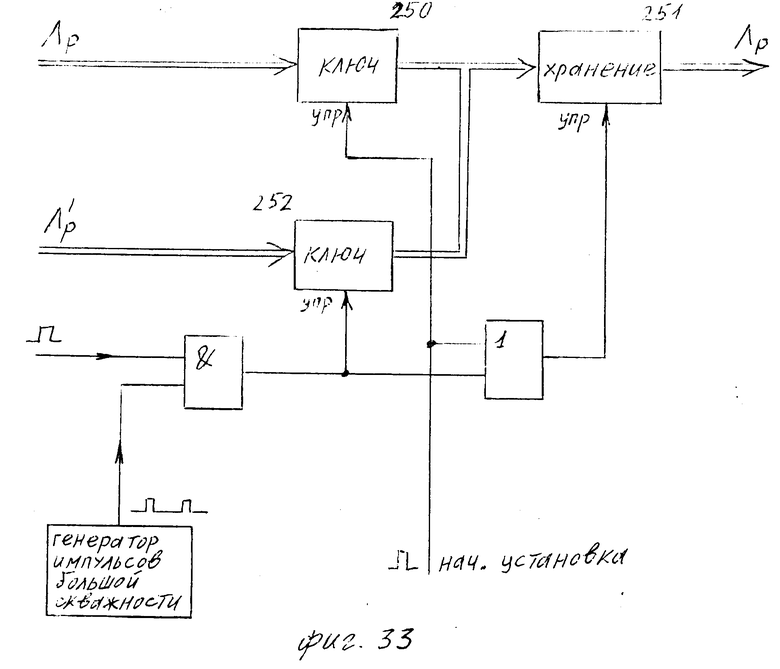
БОбПР 22 содержит генератор импульсов большой скважности, логические схемы "И" и "ИЛИ", два ключа 250 и 252 и схему хранения аналоговых сигналов 251 (см. фиг. 33). При поступлении импульса начальной установки системы через ключ 250 коммутируется Λр со входом системы хранения 251 (заносится в нее начальное состояние). При готовности нового значения  поступает импульс от 25 и коммутирует это значение со входом схемы хранения 251. На выходе ее устанавливается это новое значение. Управление схемой 251 производится схемой логического "или", т.е. и при начальной установке, и при обновлении информации.
поступает импульс от 25 и коммутирует это значение со входом схемы хранения 251. На выходе ее устанавливается это новое значение. Управление схемой 251 производится схемой логического "или", т.е. и при начальной установке, и при обновлении информации.
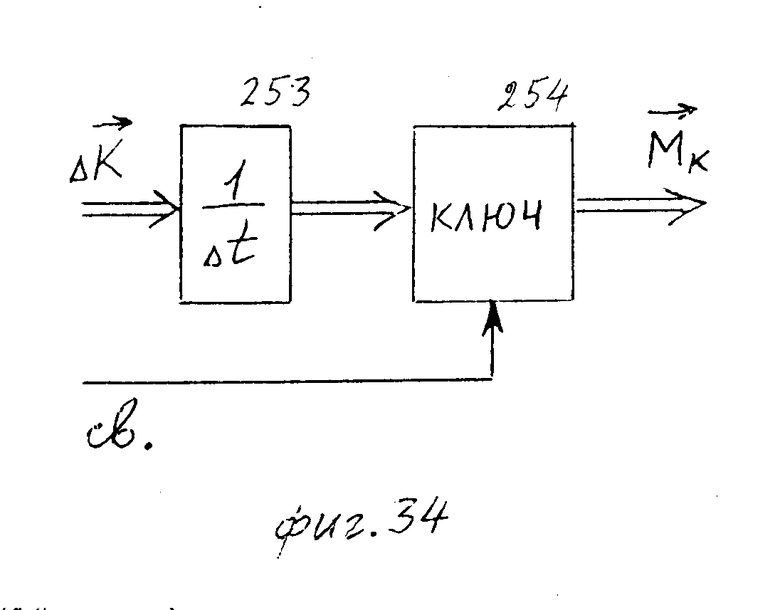
БКФМ 27 осуществляет закон управления
при наличии cb "1". При cb "0" ключ 254 разомкнут, и  (см фиг. 34).
(см фиг. 34).
Поясним принцип выбора величины Δt на примере. Пусть КА обладает моментом инерции J 200000 кг•м2, а ошибки измерения ДУСов описываются спектральной плотностью вида ,
,
где
f циклическая частота,
σ
Пусть величина a будет равна 0,03, а sw 0,001 град/с. Средняя угловая скорость разворота  0,2 град/с, допустимая величина разброса момента управления
0,2 град/с, допустимая величина разброса момента управления
sМдоп= 4π/9 H•м.
Тогда, чтобы фактический разброс момента σМ ≅ σМдоп должно быть Δt 0,2 с.
Период квантования Δt целесообразно выбирать из диапазона Δt ∈ [0,001 c, 100 c]
С целью повышения астатизма системы управления программным разворотом КА в БФКМ целесообразно иметь прогноз возмущающего момента, действующего на КА. Для этого в БФКМ системы управления по пункту 3 введены генератор гармонических сигналов 259, блок определения углового положения КА в орбитальной системе отсчета 260, блок определения направления на Землю 261, блок формирования попарных произведений 262, блок умножения на гравитационную постоянную, блок формирования гравитационного момента 263 и сумматор (фиг. 40). В этом случае корректирующий момент  формируется согласно выражению:
формируется согласно выражению:
где вычисляется через попарные произведения компонент вектора
вычисляется через попарные произведения компонент вектора  даваемого схемой фиг. 41.
даваемого схемой фиг. 41.
Как легко видеть, величина отклонения фактического кинетического момента от требуемого значения при этом законе управления значительно уменьшается и определяется только величиной неучтенных возмущений. В результате точность приведения КА в заданное угловое положение существенно повышается. В случае точного знания возмущенного вектора кинетического момента КА разворачивается строго по назначенной траектории.
БСУМ 28 производит операцию сложения соответствующих векторов (фиг. 35).
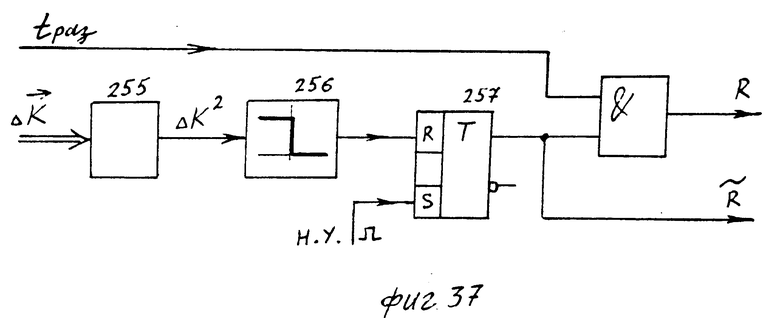
БФКР 17 формирует на выходе "1" на участке разгона (фиг. 37). Схемы 255 и 256 определяют момент, когда DK = 0 При ненулевом значении выход триггера имеет состояние  , и при поступлении команды на разворот. В момент, когда
, и при поступлении команды на разворот. В момент, когда  , триггер 257 сбрасывается в "0", и разгон окончен.
, триггер 257 сбрасывается в "0", и разгон окончен.
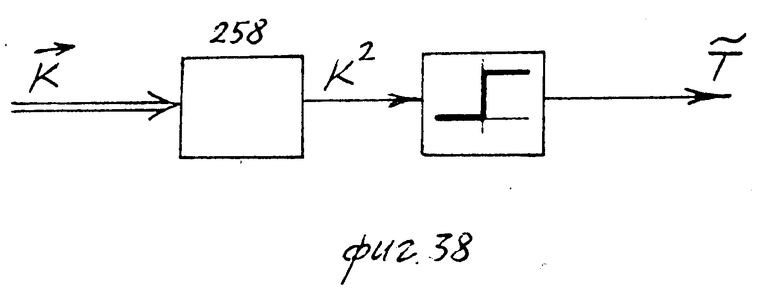
БФСОР 33 фактически определяет момент, когда  0, и реализует функцию
0, и реализует функцию
БФКТ 34 реализует логическую функцию:  , т.е.
, т.е.  , когда
, когда  , но это не разгон и не свободное движение (см. фиг. 39).
, но это не разгон и не свободное движение (см. фиг. 39).
Система, согласно изобретению, работает следующим образом.
Прежде всего, БОЭМИ 9 определяет экваториальный момент инерции J. По начальному и конечному положениям КА в БОПР 6 определяется кватернион разворота Λp Согласно полученным данным БОВР 10 выдает угол прецессии Ψ и направление кинетического момента  в связанной системе координат. Далее БПЭД 23 моделирует движение объекта в ускоренном масштабе времени в предположении, что ему сообщили кинетический момент в указанном направлении. Определяется величина промаха разворота ε и кватернион фактического углового положения КА m(Tк). Пока ε < εдоп, фактическое угловое положение, полученное моделированием в БПЭД 23, сравнивается с требуемым, и рассчитывается в БКПР 24 новый кватернион разворота, который через БОбПР 22 поступает в качестве исходных данных в БОВР 10, рассчитывается новое направление
в связанной системе координат. Далее БПЭД 23 моделирует движение объекта в ускоренном масштабе времени в предположении, что ему сообщили кинетический момент в указанном направлении. Определяется величина промаха разворота ε и кватернион фактического углового положения КА m(Tк). Пока ε < εдоп, фактическое угловое положение, полученное моделированием в БПЭД 23, сравнивается с требуемым, и рассчитывается в БКПР 24 новый кватернион разворота, который через БОбПР 22 поступает в качестве исходных данных в БОВР 10, рассчитывается новое направление  и т.д. - процесс повторяется.
и т.д. - процесс повторяется.
Как только ε ≥ εдоп БФВР 26 фиксирует полученные в БОВР 10 угол прецессии и направление кинетического момента. Далее это направление пересчитывается БОНРИ 11 в направление относительно инерциального базиса по формуле
По углу разворота в БОВРТ 14 определяется время разгона (торможения). По фактическому угловому положению, определенному БИНС 4, определяется момент
по которому в БООКМ 15 вычисляется расчетное значение кинетического момента 
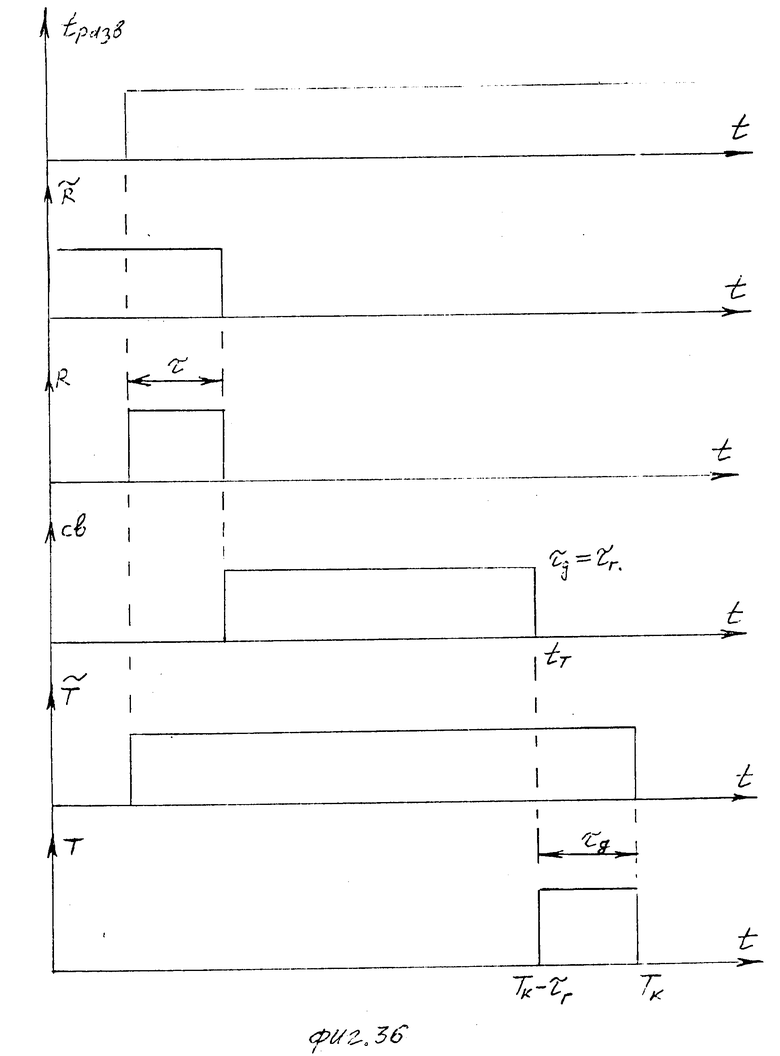
Временные диаграммы процесса разворота представлены на фиг. 36. В начальный момент времени  В момент поступления команды на разворот появляется сигнал разгона R "1", формируется и прикладывается управляющий момент. БДУС 5 измеряет абсолютную угловую скорость, а БОКМ 13 определяется фактический кинетический момент, и разгон продолжается (R "1") до момента времени, когда
В момент поступления команды на разворот появляется сигнал разгона R "1", формируется и прикладывается управляющий момент. БДУС 5 измеряет абсолютную угловую скорость, а БОКМ 13 определяется фактический кинетический момент, и разгон продолжается (R "1") до момента времени, когда  В этот момент R "0", а cb "1", и управляющий момент формируется БФКМ 27 из условия постоянства вектора кинетического момента в инерциальном пространстве. Непрерывно в БФВД 31 и в БФВГКМ 32 определяются времена τд и τг = В момент, когда τд≅ τг формируется сигнал на торможение: T "1", по которому БОНТИ 19 вычисляет и фиксирует направление тормозного момента
В этот момент R "0", а cb "1", и управляющий момент формируется БФКМ 27 из условия постоянства вектора кинетического момента в инерциальном пространстве. Непрерывно в БФВД 31 и в БФВГКМ 32 определяются времена τд и τг = В момент, когда τд≅ τг формируется сигнал на торможение: T "1", по которому БОНТИ 19 вычисляет и фиксирует направление тормозного момента  как указано выше.
как указано выше.
Это направление сохраняется постоянным в инерциальном пространстве, БФВМ 12 определяет момент .
.
Момент управления  направлен против фактического кинетического момента
направлен против фактического кинетического момента  и действует до полной остановки КА. Когда
и действует до полной остановки КА. Когда  сигнал: T "0" (
сигнал: T "0" (  ); tраз "0" разворот окончен. Система готова к следующему развороту.
); tраз "0" разворот окончен. Система готова к следующему развороту.
Эффективность предлагаемой системы определяется прежде всего тем, что на большей части траектории движения управляющий момент незначителен, что позволяет существенно экономить топливо на разворот. Вместе с тем, процесс вращательного движения КА контролируется на всей траектории, что позволяет свести к нулю влияние внешних возмущений и обеспечить высокую точность приведения КА в требуемое угловое положение даже в случае разворота на большие углы.
Использование: космическая техника; управление угловым положением космических аппаратов (КА) и орбитальных станций. Сущность изобретения: способ управления переориентаций КА реализует разворот несимметричного тела по траектории свободного углового движения; при этом, направление вектора кинетического момента КА в инерциальном пространстве остается постоянным все время разворота. Система, реализующая разворот КА, автоматически определяет параметры попадающей траектории: вектор и угол разворота, причем в системе используется метод последовательных приближений и алгоритмически решается краевая задача: определение такой начальной угловой скорости, чтобы из исходного углового положения КА, задаваемого кватернионом ΛН, в результате вращения Эйлера-Пуансо КА перешел бы в угловое положение, задаваемое кватернионом Λк через заданное время. После сообщения объекту данной угловой скорости и его свободного вращения, при подходе к конечному положению к КА прикладывается гасящий момент. Система снабжена необходимыми измерительными средствами и вычислительными блоками. Способ и реализующая его система обеспечивает повышенную точность переориентации КА и достаточную экономичность управления. 2 с.п. и 1 з.п. ф-лы, 43 ил.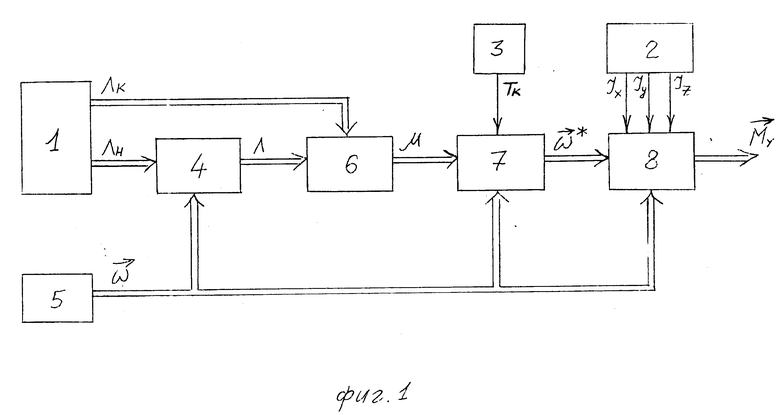

где  фактический вектор кинетического момента аппарата;
фактический вектор кинетического момента аппарата; расчетное значение вектора кинетического момента;
расчетное значение вектора кинетического момента;
Δt = const - период квантования,
до тех пор, пока время на доворот космического аппарата до конечного углового положения (τg) не станет равным времени гашения текущего кинетического момента (τг).
2. Система управления программным разворотом космического аппарата, содержащая блок задатчиков начального и конечного положений космического аппарата, блок задатчиков моментов инерции, задатчик времени разворота, бесплатформенную инерциальную навигационную систему, блок датчиков угловых скоростей, блок определения параметров разворота, блок определения экваториального момента инерции, блок определения вектора разворота, блок определения направления разгонного иммульса, блок формирования вектора момента, блок определения кинетического момента, блок определения времени разгона-торможения, блок определения отклонения кинетического момента от расчетного, блок формирования разгонного и тормозного импульсов, блок формирования команды на разгон, блок формирования команды на торможение, блок определения направления тормозного импульса, блок определения направления разворота, задатчик максимальный величины управляющего момента, при этом выход задания начального углового положения блока задатчиков начального и конечного положений космического аппарата связан с входом ввода параметров начального углового положения блока определения параметров разворота, входом ввода начальных условий бесплатформенной инерциальной навигационной системы и входом ввода параметров углового положения блока определения направления разгонного импульса, выход задания параметров конечного углового положения блока задатчиков начального и конечного положений аппарата связан с входом ввода параметров конечного углового положения блока определения параметров разворота, первый выход задания момента инерции вокруг поперечной оси блока задатчиков моментов инерции связан с первым входом блока определения экваториального момента инерции и первым входом ввода моментов инерции блока определения кинетического момента, второй выход задания момента инерции вокруг поперечной оси блока задатчиков моментов инерции связан с вторым входом блока определения экваториального момента инерции и вторым входом ввода моментов инерции блока определения кинетического момента, выход задания момента инерции вокруг продольной оси блока задатчиков моментов инерции связан с входом ввода момента инерции вокруг продольной оси блока определения вектора разворота и третьим входом ввода моментов инерции, блока определения кинетического момента, выход задатчика времени разворота связан с входом ввода времени разворота блока определения времени разгона-торможения, выход бесплатформенной инерциальной навигационной системы связан с входом ввода текущего углового положения блока формирования вектора момента и входом ввода параметров углового положения блока определения направления тормозного импульса, выход блока датчиков угловых скоростей связан с входом ввода вектора угловой скорости бесплатформенной инерциальной навигационной системы и входом ввода вектора угловой скорости блока определения кинетического момента, выход блока определения экваториального момента инерции связан с входом ввода момента инерции вокруг поперечной оси блока определения вектора разворота и входом ввода момента инерции блока определения времени разгона-торможения, выход блока определения направления разгонного импульса связан с входом ввода вектора разворота для разгонного импульса блока определения направления разворота, выход блока формирования вектора момента связан с входом ввода потребного момента управления блока определения отклонения кинетического момента от расчетного и входом ввода потребного момента управления блока формирования разгонного и тормозного импульсов, выход блока определения кинетического момента связан с входом ввода кинетического момента блока определения отклонения кинетического момента от расчетного и аналогичным входом блока определения направления тормозного импульса, выход блока определения времени разгона-торможения связан с входом ввода времени разгона блока определения отклонения кинетического момента от расчетного, выход блока определения отклонения кинетического момента от расчетного связан с входом блока формирования команды на разгон, выход наличия участка разгона блока формирования команды на разгон связан с входом разрешения-выдачи разгонного импульса блока формирования разгонного и тормозного импульсов и входом коммутации блока определения направления разворота, выход блока определения направления тормозного импульса связан с входом ввода вектора разворота для тормозного импульса блока определения направления разворота, выход блока определения направления разворота связан с входом ввода направления разворота блока формирования вектора момента, выход задатчика максимальной величины управляющего момента связан с входом ввода величины потребного момента управления блока формирования вектора момента и входом ввода максимального момента управления блока определения времени разгона-торможения, отличающаяся тем, что в нее введены блок обновления параметров разворота, блок прогнозирования эйлерова движения космического аппарата, блок коррекции параметров разворота, блок формирования команды на фиксацию вектора разворота, блок фиксации вектора разворота, блок формирования корректирующего момента, блок суммирования управляющего момента, блок формирования команды на свободное движение, блок определения параметров доворота, блок формирования времени на доворот космического аппарата до конечного углового положения, блок формирования времени гашения текущего кинетического момента, блок формирования сигнала об окончании разворота, блок выделения команды на торможение, при этом выход задания начального углового положения блока задатчиков начального и конечного положения космического аппарата связан с входом ввода начального углового положения блока прогнозирования эйлерова движения аппарата, выход задания параметров конечного углового положения блока задатчиков начального и конечного положений аппарата связан с входом ввода требуемого углового положения блока прогнозирования эйлерова движения аппарата, аналогичными входами блока коррекции параметров разворота и блока определения параметров доворота, первый выход задания момента инерции вокруг поперечной оси блока задатчика моментов инерции связан с первым входом ввода моментов инерции блока прогнозирования эйлерова движения космического аппарата, второй выход задания момента инерции вокруг поперечной оси блока задатчиков моментов инерции связан с вторым входом ввода моментов инерции блока прогнозирования эйлерова движения аппарата, выход задания момента инерции вокруг продольной оси блока задатчиков моментов инерции связан с третьим входом блока определения экваториального момента инерции и третьим входом ввода моментов инерции блока прогнозирования эйлерова движения аппарата, выход задатчика времени разворота связан с входом ввода времени разворота блока прогнозирования эйлерова движения аппарата, выход бесплатформенной инерциальной навигационной системы связан с входом ввода текущего углового положения блока определения параметров доворота, выход блока датчиков угловых скоростей связан с входом ввода вектора угловой скорости блока формирования времени на доворот космического аппарата до конечного углового положения, выход блока определения параметров разворота связан с входом ввода исходных параметров разворота блока обновления параметров разворота, выход блока определения экваториального момента инерции связан с входом ввода экваториального момента инерции блока прогнозирования эйлерова движения аппарата, выход задания вектора разворота блока определений вектора разворота связан с входом ввода вектора разворота блока прогнозирования эйлерова движения аппарата и входом задания вектора разворота блока фиксации вектора разворота, выход задания угла разворота блока определения вектора разворота связан с входами ввода угла равзорота блока прогнозирования эйлерова движения аппарата и блока фиксации вектора разворота, выход блока определения кинетического момента связан с входом ввода кинетического момента блока формирования времени гашения текущего кинетического момента и входом блока формирования сигнала об окончавии разворота, выход блока определения отклонения кинетического момента от расчетного связан с информационным входом блока формирования корректирующего момента, выход блока формирования разгонного и тормозного импульсов связан с первым входом блока суммирования управляющего момента, выход наличия участка разгона блока формирования команды на разгон связан с одноименным входом блока выделения команды на торможение, выход задания момента окончания разгона блока формирования команды на разгон связан с логическим входом блока формирования команды на свободное движение, выход задатчика максимальной величины управляющего момента связан с входом ввода максимального момента управления блока формирования времени гашения текущего кинетического момента, выход блока обновления параметров разворота связан с входом ввода параметров разворота блока определения вектора разворота и входом ввода параметров разворота блока коррекции параметров разворота, выход прогнозируемого углового положения блока прогнозирования эйлерова движения космического аппарата связан с входом ввода прогнозируемого углового положения блока коррекции параметров разворота, выход сигнала рассогласования блока прогнозирования эйлерова движения аппарата связан с входом блока формирования команды на фиксацию вектора разворота, выход блока коррекции параметров разворота связан с входом ввода скорректированных параметров разворота блока обновления параметров разворота, выход блока формирования команды на фиксацию вектора разворота связан с входом разрешения итераций блока обновления параметров разворота и стробирующим входом блока фиксации вектора разворота, выход зафиксированного вектора разворота блока фиксации вектора разворота связан с входом задания расчетного вектора разворота блока определения направления разгонного импульса, выход зафиксированного угла разворота блока фиксации вектора разворота связан с входом задания угла разворота блока определения времени разгона-торможения, выход блока формирования корректирующего момента связан с вторым входом блока суммирования управляющего момента, выход блока формирования команды на свободное движение связан с управляющим входом блока формирования корректирующего момента и входом наличия участка свободного движения блока выделения команды на торможение, выход блока определения параметров доворота связан с входом задания параметров доворота блока формирования времени на доворот космического аппарата до конечного углового положения, выход блока формирования времени на доворот аппарата до конечного углового положения связан с входом задания времени на доворот блока формирования команды на свободное движение, выход блока формирования времени гашения текущего кинетического момента связан с входом задания времени гашения кинетического момента блока формирования команды на свободное движение, выход блока формирования сигнала об окончании разворота связан с входом наличия разворота блока выделения команды на торможение, выход блока выделения команды на торможение связан со стробирующим входом блока определения направления тормозного импульса, входом разрешения выдачи тормозного импульса блока формирования разгонного и тормозного импульсов и входом коммутации направления торможения блока определения направления разворота.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Крутько П.Д | |||
| Обратные задачи динамики управляемых систем | |||
| М.: Наука, 1988, с.168-178 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Бранец В.Н., Черток М.Б., Казначеев Ю.В | |||
| Оптимальный разворот твердого тела с одной осью симметрии | |||
| Космические исследования | |||
| Колосниковая решетка с чередующимися неподвижными и движущимися возвратно-поступательно колосниками | 1917 |
|
SU1984A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Тетельбаум И.М., Шнейдер Ю.Р | |||
| Практика аналогового моделирования динамических систем | |||
| М.: Энергоатомиздат, 1987, с.181 | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Якубовский С.В | |||
| Аналоговые и цифровые интегральные схемы | |||
| М.: Советское радио, 1985, с.76-96, 313-321, 370-375. | |||
