Изобретение относится к радиотехнике и может быть использовано для обнаружения различного рода изменений в ограниченном объеме, преимущественно при разработке систем охранной сигнализации, а также систем противопожарной сигнализации.
Известно устройство для тревожной сигнализации ультразвукового типа, содержащее генератор, излучающий и приемный преобразователи, усилители, частотные фильтры, сигнальное устройство (авторское свидетельство СССР N 291222, кл. G 08 B 13/18, опубл. 06.01.71).
Ограничением этого устройства, основанного на эффекте Допплера, является возможность функционирования только с подвижными объектами.
Известно также устройство для охранной сигнализации, содержащее генератор фиксированной частоты, выход которого соединен с входом излучателя звуковых или ультразвуковых колебаний, приемник излучения и сигнальное устройство (Доклад конференции на выставке "Охрана музеев - 94. Новгород").
Устройство также содержит избирательный усилитель, ограничитель амплитуды, фазовый детектор, полосовой фильтр, усилитель низкой частоты (УНЧ), причем выход приемника излучения через избирательный усилитель соединен с входом ограничителя амплитуды, выход генератора фиксированной частоты и выход ограничителя амплитуды соединены соответственно с опорным и информационным входами фазового детектора, выход которого через полосовой фильтр соединен с входом усилителя низкой частоты, выход которого соединен с входом амплитудного детектора. Эта функциональная схема является достаточно характерной для устройств подобного рода.
При наличии движущегося объекта в результате появления отраженных волн от этого объекта происходит изменение амплитудных и фазовых характеристик принимаемого сигнала. При малых сигналах устройство работает как по фазовой, так и по амплитудной составляющей звукового поля, а при больших уровнях (больше порога ограничения ограничителя амплитуды) - по фазовой составляющего сигнала.
Полосовой фильтр пропускает для дальнейшей обработки сигнал с частотой, которая соответствует реальной скорости движения объекта в охраняемой зоне. Сигналы с частотами ниже (являющиеся, например, следствием дрейфа частоты генератора) и выше (результат помех от включения электродвигателей, искрения контактов электропроводок и так далее) через полосовой фильтр для дальнейшей обработки не проходят.
УНЧ усиливает слабый сигнал до уровня, необходимого для работы амплитудного детектора.
Амплитудный детектор преобразует сигнал переменного напряжения с выхода УНЧ в постоянное, с уровнем, пропорциональным уровню сигнала переменного напряжения УНЧ.
Напряжение с выхода амплитудного детектора при превышении определенного порога вызывает срабатывание сигнального устройства.
Таким образом, устройство контролирует амплитудную и фазовую составляющие звукового поля.
Из анализа функциональной схемы следует, что корреляция между возможным уровнем отклонения входного сигнала при наличии движущегося объекта и порогом срабатывания отсутствует, и это является существенным недостатком рассматриваемого устройства. Как известно из акустики, абсолютная величина отклонения принимаемого сигнала от его среднего значения зависит как от абсолютной величины самого принимаемого сигнала, так и от характера возмущения, поэтому чувствительность P(U) рассматриваемого устройства будет расти с увеличением входного сигнала из зоны полной нечувствительности, когда при наличии перемещения в охраняемой зоне абсолютное отклонение принимаемого сигнала не может превышать порог Pn, в зону чувствительности, где чувствительность есть функция амплитуды и фазы принимаемого сигнала, достигая максимума, который наблюдается при отсечке принимаемого сигнала на ограничителе амплитуды, приблизительно при угле отсечки 15 - 20 градусов. Далее, с увеличением входного сигнала больше Uвх/max чувствительность рассматриваемого устройства будет все меньше зависеть от амплитуды, пока не останется только зависимость чувствительности Pf от фазы, которая, очевидно, меньше полной чувствительности. К чувствительности Pf от фазы сверху и будет стремиться чувствительность рассматриваемого устройства. В частности, во-первых, уровень Pf может оказаться ниже Pn, при этом рассматриваемое устройство вообще потеряет чувствительность, во-вторых, максимум может оказаться охваченным зоной гиперчувствительности Pr, при этом такое устройство будет срабатывать от малейших колебаний входного сигнала, что приведет к резкому увеличению ложных срабатываний рассматриваемого устройства. После проецирования кривой чувствительности такого устройства на зону обнаружения становится очевидно, что устойчиво функционировать оно может только при обеспечении некоторого оптимального уровня входного сигнала.
Наиболее близким техническим решением является способ обнаружения изменения положения объекта, включающий зондирование акустическим сигналом ограниченного разделом сред объема пространства, прием отраженного сигнала, запоминание этого сигнала до изменения положения объекта и сравнение сигналов до изменения положения объекта и после изменения положения объекта (авторское свидетельство СССР N 1821773, кл.G 01 S 15/04, опубл. 15.06.93).
Также из указанного охранного документа известно устройство для обнаружения изменения положения объекта, содержащее формирователь сигнала излучения, излучатель акустического сигнала, приемник акустического сигнала, измеритель, запоминающее устройство, вычислитель рассогласования, блок принятия решений, при этом выход формирователя сигнала излучения связан с входом излучателя акустического сигнала, выход приемника акустического сигнала связан с входом измерителя, выход которого связан с входом данных запоминающего устройства, выход которого связан с первым входом вычислителя рассогласования, и выход измерителя связан с вторым входом вычислителя рассогласования, выход которого связан с сигнальным входом блока принятия решений.
Способ предусматривает также прием комплексной амплитуды отраженного излучения, определение его интенсивности, сравнение с априорно известным значением интенсивности излучения, отраженного подстилающей поверхностью при отсутствии в исследуемой среде подвижного объекта, и по результатам сравнения определение наличия в исследуемой среде подвижного объекта.
К ограничениям устройств, построенных по данному способу, относится то, что они работают только в зоне прямой видимости и в пределах пересечения диаграмм направленности (ДН) излучателя и приемника акустического сигнала, и их эффективность снижается при наличии препятствий, мешающих свободному распространению зондирующего сигнала.
Для всех указанных выше аналогов эффективной для обнаружения изменения положения объекта оказывается только зона пересечения их ДН - зона чувствительности. Все остальное пространство ограниченного объема, например, помещения представляет собой зону нечувствительности. Еще большая неопределенность в работе таких устройств возникает при установке их в сложных акустически связанных помещениях, либо в помещениях с большим количеством препятствий, либо в помещениях с неопределенным положением препятствий.
Кроме того, ограничениями ближайшего технического решения являются: зависимость чувствительности от акустических свойств (поглощающей и отражающей способности) перемещающегося объекта, а также зависимость чувствительности от расстояния до объекта, то есть для одного и того же объекта вероятность обнаружения падает с увеличением расстояния от излучателя акустического сигнала и приемника акустического сигнала. К ограничениям также относится необходимость выполнения требования формирования опорного сигнала через интервал времени, в течение которого должно отсутствовать движение в исследуемой зоне ограниченного объема, что не всегда может быть выполнено, и невозможность коррекции опорного сигнала для нивелирования естественных изменений акустической картины, определяемой подстилающей поверхностью.
Задача, решаемая изобретением, - повышение качества обнаружения во всем ограниченном объеме.
Технический результат для предложенного способа - возможность зондирования ограниченного объема полностью и возможность обнаружения как нестационарных, так и стационарных изменений, вносимых объектом в ограниченный объем.
Технический результат, который может быть получен при осуществлении устройства, - независимость зоны чувствительности от ДН излучателя акустического сигнала и ДН приемника акустического сигнала; обеспечение распределения зоны чувствительности по всему ограниченному объему; независимость чувствительности от акустических свойств объекта, вносящего изменения в объем, и от дальности до объекта; отсутствие требования движения объекта при формировании опорного сигнала, поэтому опорный сигнал может быть откорректирован к естественным изменениям акустической картины.
Для решения поставленной задачи в известном способе обнаружения изменения положения объекта, включающем зондирование акустическим сигналом ограниченного разделом сред пространства, прием отраженного сигнала, запоминание этого сигнала до изменения положения объекта и сравнение сигналов до изменения положения объекта и после изменения положения объекта, согласно изобретению принимают сигнал, представляющий собой линейную суперпозицию акустических волн, проходящих через точку приема, измеряют его амплитудные и фазовые характеристики, по ним определяют матрицу параметров, соответствующую положению узлов и пучностей стоячей акустической волны, запоминают эту матрицу и при изменении по меньшей мере одного из параметров матрицы судят об изменении положения объекта.
Возможны варианты осуществления способа, в которых целесообразно производить зондирование:
- монохроматическим акустическим сигналом,
- немонохроматическим акустическим сигналом,
- импульсным акустическим сигналом.
Для решения поставленной задачи в известном устройстве для обнаружения изменения положения объекта, содержащем формирователь сигнала излучения, излучатель акустического сигнала, приемник акустического сигнала, измеритель, запоминающее устройство, вычислитель рассогласования, блок принятия решений, при этом выход формирователя сигнала излучения связан с входом излучателя акустического сигнала, выход приемника акустического сигнала связан с входом измерителя, выход которого связан с входом запоминающего устройства, выход данных которого связан с первым входом данных вычислителя рассогласования, и выход измерителя связан с вторым входом данных вычислителя рассогласования, выход данных которого связан с входом блока принятия решений, согласно изобретению приемник акустического канала выполнен многоканальным с возможностью приема по меньшей мере двух акустических сигналов, измеритель выполнен с возможностью измерения амплитудных и фазовых характеристик сигнала, введены вычислитель матрицы состояния акустического поля и вычислитель опорной матрицы состояния акустического поля, причем выход измерителя связан с входом данных запоминающего устройства через вычислитель опорной матрицы состояния акустического поля и с вторым входом данных вычислителя рассогласования - через вычислитель матрицы состояния акустического поля.
Возможны варианты осуществления устройства, в которых целесообразно ввести:
- устройство корректировки порога и интервала интегрирования, вход которого связан с выходом данных запоминающего устройства, а выход - с управляющим входом блока принятия решений;
- постоянное запоминающее устройство набора ожидаемых изменений матрицы образа акустического поля, формирователь-корректор, вычислитель корреляции и нормирующий усилитель, причем выход формирователя сигнала излучения связан с входом нормирующего усилителя, выход которого связан с первым входом формирователя-корректора, выход данных вычислителя рассогласования связан с вторым входом данных формирователя-корректора, выход данных постоянного запоминающего устройства набора ожидаемых изменений матрицы образа акустического поля связан с третьим входом данных формирователя-корректора, управляющий выход формирователя-корректора связан с управляющим входом постоянного запоминающего устройства набора ожидаемых изменений матрицы образа акустического поля, выход данных запоминающего устройства связан с четвертым входом данных формирователя-корректора, выход данных которого связан с первым входом данных вычислителя корреляции, выход данных вычислителя рассогласования связан с вторым входом данных вычислителя корреляции, блок принятия решений выполнен с возможностью корректирования решения согласно результатам корреляционной обработки и выполнен с первым дополнительным входом, связанным с выходом вычислителя корреляции;
- ключевое устройство и пороговое устройство, выход измерителя связан с входом вычислителя опорной матрицы состояния акустического поля через ключевое устройство, а управляющий вход ключевого устройства связан с выходом данных вычислителя рассогласования через пороговое устройство;
- блок запуска теста, формирователь тестового сигнала, нормирующий блок, переключающий блок, регулирующий блок, запоминающее устройство уровня регулировки, измеритель уровня тестового сигнала, блок сравнения и управляющий блок, причем формирователь сигнала излучения связан с первыми входами нормирующего блока и переключающего блока, выход формирователя тестового сигнала связан с вторым входом нормирующего блока, выход которого связан с вторым входом переключающего блока, выход которого связан с сигнальным входом регулирующего блока, выход которого связан с входом излучателя акустического сигнала, выход приемника акустического сигнала дополнительно связан с последовательно подсоединенными измерителем уровня тестового сигнала, блоком сравнения и управляющим блоком, выход данных которого связан с первым входом данных регулирующего блока и с первым входом данных запоминающего устройства уровня регулировки, а управляющий выход - с управляющим входом блока запуска теста, блок принятия решений выполнен с возможностью запрета формирования сигналов при тестировании и его второй дополнительный вход запрета связан с первым управляющим выходом блока запуска теста, первый управляющий выход блока запуска теста связан с управляющими входами запоминающего устройства уровня регулировки и переключающего блока, а второй управляющий выход блока запуска теста связан с управляющим входом формирователя тестового сигнала, при этом входы и выходы данных запоминающего устройства связаны с входами и выходами данных регулирующего блока соответственно;
- регулирующий элемент АРУ канала излучателя, регулирующий элемент АРУ канала приемника, измеритель величины помехи, вычислитель состояния регулирующих элементов цепей АРУ, блок управления, запоминающее устройство состояния регулирующих элементов цепей АРУ, причем выход переключающего блока связан с сигнальным входом регулирующего блока через регулирующий элемент АРУ канала излучателя, выход приемника акустического сигнала дополнительно связан с последовательно соединенными регулирующим элементом АРУ канала приемника, измерителем величины помехи и вычислителем состояния регулирующих элементов цепей АРУ, первый управляющий выход которого связан с входом блока управления, а второй выход данных - с входом данных запоминающего устройства состояния регулирующих элементов цепей АРУ, управляющий выход блока управления связан с управляющим входом запоминающего устройства состояния регулирующих элементов цепей АРУ и с вторым дополнительным входом запрета блока принятия решения, выход данных запоминающего устройства состояния регулирующих элементов цепей АРУ связан с входами данных регулирующего элемента АРУ канала излучателя и регулирующего элемента АРУ канала приемника;
- первый и второй предварительные усилители, аналоговое вычитающее устройство, синхронный детектор, формирователь опорного сигнала, фильтр синхронного детектора, аналого-цифровой преобразователь, согласующее устройство, сигнальное устройство, преобразователь цифрового сигнала в аналоговый, согласующий усилитель, усилитель мощности, приемник акустического сигнала выполнен с возможностью приема двух акустических сигналов, при этом вход первого предварительного усилителя связан с первым каналом приема, а вход второго предварительного усилителя - с вторым каналом приема, и их выходы связаны с сигнальными входами аналогового вычитающего устройства, выход которого связан с входом регулирующего элемента АРУ канала приемника, выход которого связан с измерителем величины помехи через последовательно связанные синхронный детектор, фильтр синхронного детектора, аналого-цифровой преобразователь, выход формирователя опорного сигнала связан с опорным входом синхронного детектора и с пятым входом формирователя-корректора, при этом к выходу аналого-цифрового преобразователя подсоединены параллельно измеритель и измеритель уровня тестового сигнала, выход переключающей схемы связан с сигнальным входом регулирующей схемы через последовательно соединенные преобразователь цифрового сигнала в аналоговый и регулирующий элемент АРУ излучателя, выход регулирующей схемы связан с входом излучателя акустического сигнала через последовательно соединенные согласующий усилитель и усилитель мощности, а вход сигнального устройства связан через согласующее устройство с выходом блока принятия решений, при этом управляющий выход блока принятия решений связан с управляющим входом аналогового вычитающего устройства.
В заявленном техническом решении ограниченный объем облучается акустическим сигналом, в результате чего, благодаря свойствам, присущим акустическому сигналу, таким, как рефракция, интерференция, отражение от границы раздела сред, в этом ограниченном объеме образуется стоячая волна. Такая стоячая волна охватывает весь ограниченный объем независимо от пространственной сложности этого объема. Пучности и узлы этой стоячей волны изменяются при попадании в них объекта независимо от акустических свойств самого объекта, кроме того, пучности и узлы стоячей волны распределены равномерно по всему ограниченному объему и образуют стационарную акустическую картину с жесткими связями, то есть нарушение одной из пучностей или узла приводит к цепной реакции перестройки местоположения узлов и пучностей, амплитуд пучностей, а также амплитуды и фазы сигнала, заполняющего ограниченный объем по всему этому объему, что и фиксируется.
Таким образом, принимая в произвольной точке ограниченного объема суммарный сигнал, определяя его амплитуду и фазу, вычисляя местоположение узлов и пучностей, амплитуды пучностей стоячей волны, а затем сравнивая стационарное значение измеренных и вычисленных параметров с текущим, по результатам сравнения можно судить о наличии каких-либо изменений в ограниченном объеме.
В результате принципиально изменяется зона чувствительности, которая становится тождественно равна всему ограниченному объему, независимо от пространственной сложности и конфигурации этого объема, отсутствуют "мертвые зоны" вне пределов дальности функционирования устройства, построенного по данному способу, а также существенно повышается надежность обнаружения изменений в любой точке этого объема.
Наиболее просто способ осуществим при зондировании ограниченного объема монохроматическим акустическим сигналом, в этом случае аппаратная функция упрощается.
Однако можно использовать и более сложный немонохроматический акустический сигнал, в том числе и импульсный, для которого один или несколько его параметров есть сложная функция времени или пространства. В этом случае обработка принимаемого сигнала значительно усложняется, но повышается устойчивость к помехам и, соответственно, увеличивается качество обнаружения изменений во всем ограниченном объеме.
Приемник акустического сигнала может представлять собой систему из элементарных приемников, что позволяет проводить векторный анализ состояния акустического поля, строить матрицу состояния образа акустического поля и опорную матрицу состояния образа акустического поля. Очевидно, что для построения трехмерного образа состояния акустического поля достаточно принять акустический сигнал в четырех точках локальной области ограниченного объема, определяющих собой ортогональную систему координат. Применение большего числа элементарных приемников увеличивает точность вычислений за счет возникновения перекрестной корреляции, но и увеличивает сложность этих вычислений, а применение косоугольной системы координат приводит лишь к появлению постоянных коэффициентов, пропорциональных косинусу угла между соответствующими осью и нормалью к плоскости, определяемой другими координатными осями.
Возможна реализация данного технического решения с количеством элементарных приемников, меньшим чем 4. В этом случае будет отображаться плоская или линейная проекция вектора состояния акустического поля. Такое упрощение является вполне допустимым, так как изменение положения узлов и пучностей стоячей волны в ограниченном объеме в результате каких-либо изменений в этом объеме носит изотропный характер и происходит по всем координатным осям условной системы координат, определяемой элементарными приемниками.
Можно отметить, что возможна упрощенная реализация данного технического решения при вычислении только амплитуды или только фазы принимаемых акустических сигналов, возможно селектирование только по длительности или только амплитуде, но это снижает качество обнаружения изменения во всем ограниченном объеме.
Указанные преимущества, а также особенности настоящего изобретения могут быть проиллюстрированы вариантами его осуществления со ссылками на прилагаемые чертежи.
Фиг. 1 изображает функциональную схему устройства для обнаружения изменения положения объекта;
фиг. 2 - то же, что фиг. 1, вариант с корректировкой порога и интервала интегрирования;
фиг. 3 - зависимость поправочных коэффициентов cp для порога P и ct для интервала интегрирования Т от величины вектора  ;
;
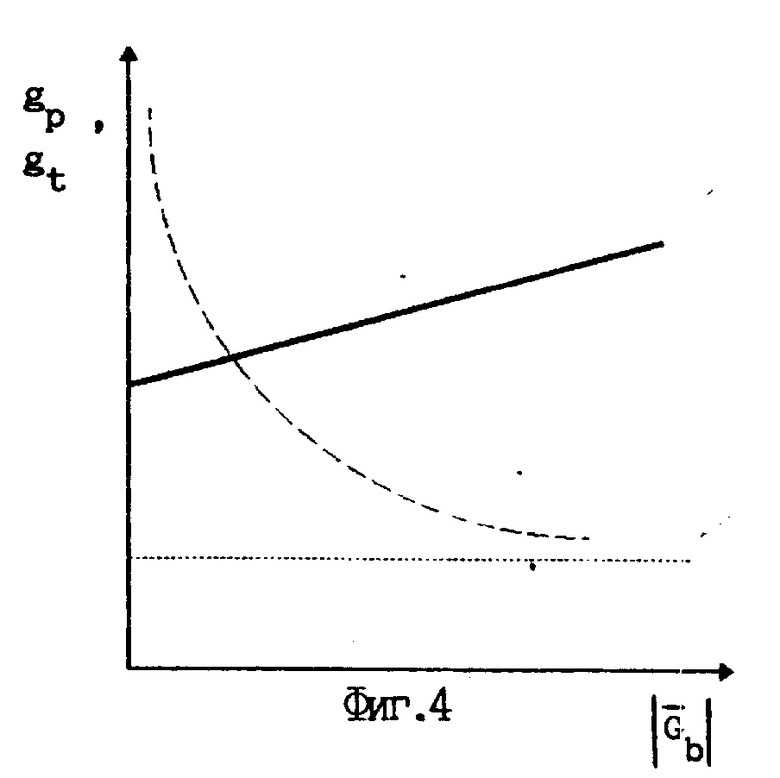
фиг. 4 - зависимость поправочных коэффициентов qp для порога P и qt для интервала интегрирования T от величины вектора  ;
;
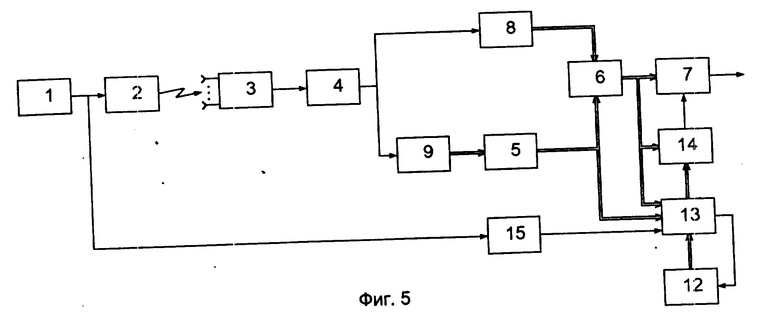
фиг.5 - то же, что фиг.1, вариант с корреляционной обработкой;
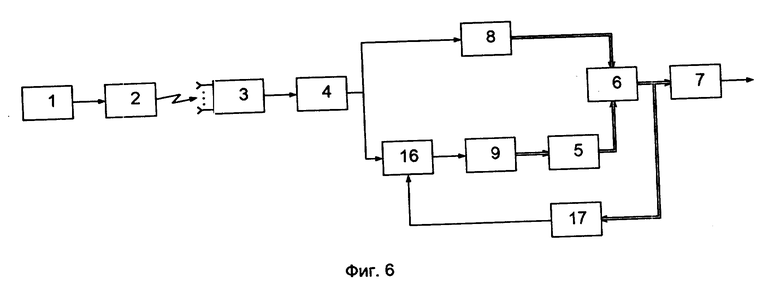
фиг.6 - то же, что фиг.1, вариант с обратной связью;
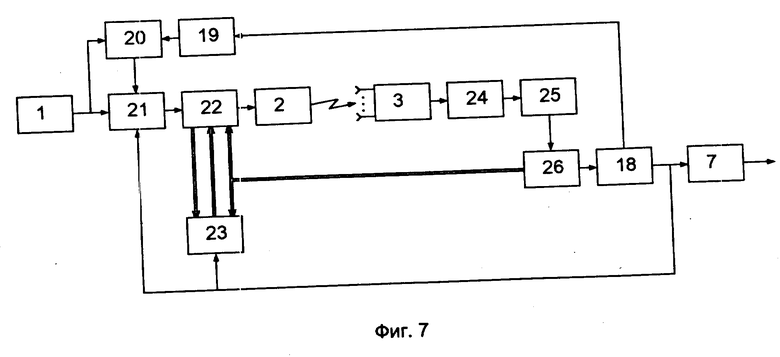
фиг.7 - то же, что фиг.1, вариант с тестированием;
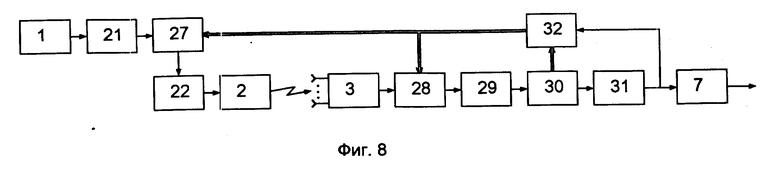
фиг.8 - то же, что фиг.7, вариант с цепями АРУ;
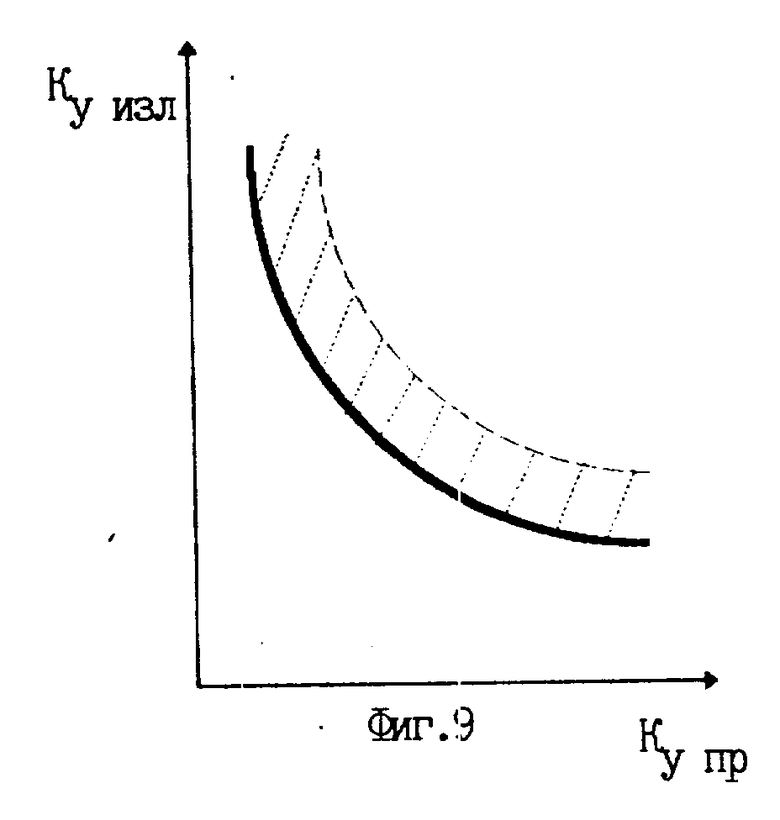
фиг.9 - регулировочные характеристики для коэффициентов усиления Kуизл, Kупр излучателя и приемника соответственно;
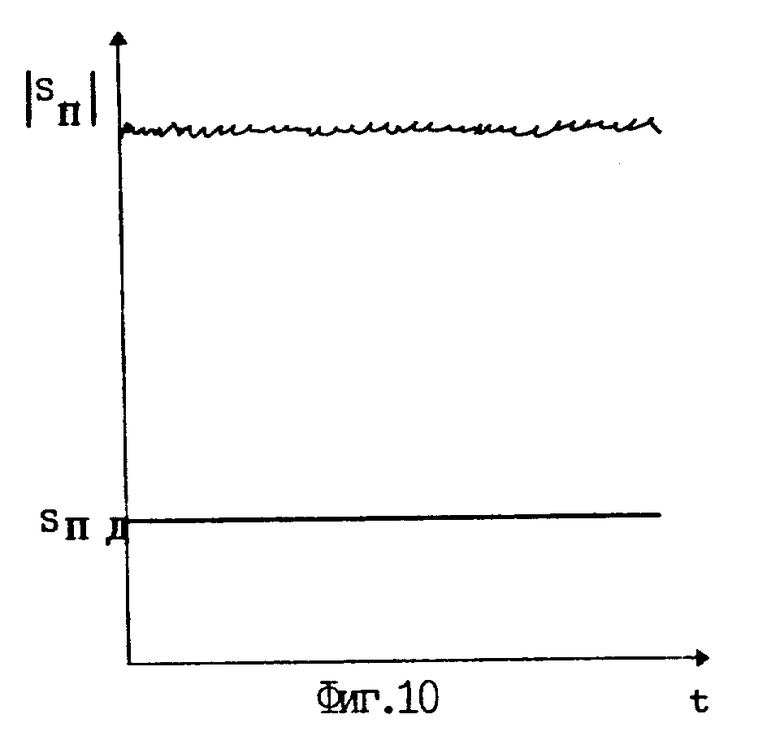
фиг.10 - временная зависимость величины сигнала шумовой помехи;
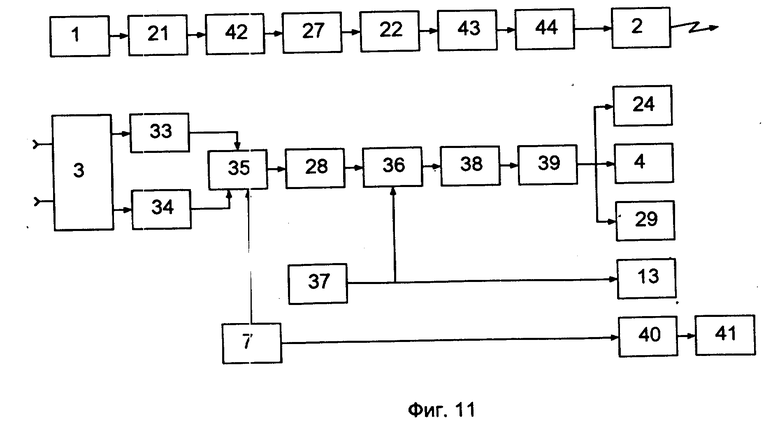
фиг. 11 - то же, что фиг. 5, 7, 8, вариант с использованием цифровой обработки.
Поскольку заявленный способ обнаружения изменения положения объекта реализуется в устройстве, описание способа приведено и раскрыто в описании работы вариантов устройств.
Устройство (фиг. 1) содержит формирователь 1 сигнала излучения, излучатель 2 акустического сигнала, приемник 3 акустического сигнала, измеритель 4, запоминающее устройство (ЗУ) 5, вычислитель 6 рассогласования, блок 7 принятия решений. Выход формирователя 1 связан с входом излучателя 2. Выход приемника 3 связан с входом измерителя 4, выход которого связан с входом данных запоминающего устройства 5, выход которого связан с первым входом данных вычислителя 6. Выход измерителя 4 связан с вторым входом данных вычислителя 6, выход которого связан с входом блока 7 принятия решений.
Приемник 3 выполнен многоканальным с возможностью приема по меньшей мере двух акустических сигналов. Измеритель 4 выполнен с возможностью измерения амплитудных и фазовых характеристик. Введены вычислитель 8 матрицы состояния акустического поля и вычислитель 9 опорной матрицы состояния акустического поля. Выход измерителя 4 связан с входом данных запоминающего устройства 5 через вычислитель 9 опорной матрицы состояния акустического поля и с втором входом данных вычислителя 6 рассогласования через вычислитель 8 матрицы состояния акустического поля.
Формирователь 1 генерирует сигнал вида:
A(t) = Aocos(ωot+ϕo),
где A0- амплитуда сигнала;
ωo - несущая частота;
ϕo - начальная фаза.
Излучатель 2 облучает ограниченный объем, в котором в силу описанных выше свойств акустического сигнала образуется стоячая волна. При этом на вход приемника 3 воздействует сигнал, представляющий собой линейную суперпозицию всех прямых и отраженных сигналов, проходящих через область ограниченного объема, в которой расположен приемник 3. Приемник 3 представляет собой, как описывалось выше, систему из независимых элементарных приемников, что позволяет проводить векторный анализ состояния акустического поля, строить матрицу состояния образа акустического поля и опорную матрицу состояния образа акустического поля. Для примера приведем математические выкладки для ортогональной системы координат с четырьмя элементарными приемниками при использовании монохроматического зондирующего сигнала. В этом случае на выходе приемника 3 формируются сигналы:
где A1, A2, A3, A4 и ϕ1, ϕ2, ϕ3, ϕ4 - амплитуды и фазы сигналов на выходе элементарных приемников соответственно.
В измерителе 4 измеряются эти амплитуды и фазы, которые поступают на вычислители 8 и 9 для вычисления матрицы состояния акустического поля и опорной матрицы соответственно. Эти матрицы описывают вектор  и опорный вектор
и опорный вектор  состояния акустического поля:
состояния акустического поля:
где x; y; z - координаты вектора  акустического поля,
акустического поля,
xb; yb; zb - координаты опорного вектора  акустического поля, вычисленные в принятой за основу системе координат.
акустического поля, вычисленные в принятой за основу системе координат.
Вектор  поступает на ЗУ 5 для его запоминания.
поступает на ЗУ 5 для его запоминания.
Вычислитель 9 опорной матрицы состояния акустического поля может отличаться от вычислителя 8 матрицы состояния акустического поля, например тем, что он построен с более медленными фильтрами или с линией задержки, что приводит к тому, что изменения сигналов, поступающих одновременно на входы вычислителей 8 и 9, появляются на выходе данных запоминающего устройства 5 с задержкой по отношению к выходу данных вычислителя 8. В результате на вычислитель 6 рассогласования поступают два сигнала, отражающие состояние акустического поля в локальной точке ограниченного объема, но с вычислителя 8 поступает текущее состояние, а с запоминающего устройства 5 - опорное, то есть то состояние, которое было до изменения. Вычислитель 9 при этом вычисляет вектор, представляющий собой: .
.
Величина этого вектора Dr, которую также вычисляет вычислитель 8, представляет собой ,
,
и отражает смещение или колебания распределения акустического поля в ограниченном объеме, вызванные изменениями в нем.
Блок 7 принятия решения, на который поступает Dr, селектирует эти изменения по амплитуде и длительности и в случае, если интегральная плотность DS изменений за время T, характерное для изменений, причиной которых является реальное изменение в ограниченном объеме, а не случайная флюктуация, помеха или уход параметров дискретных элементов устройства
(где t0 - момент начала интегрирования и соответствует моменту появления рассогласования между  ) больше порога P, вырабатывается тревожный сигнал.
) больше порога P, вырабатывается тревожный сигнал.
Порог P выбирается для каждого типа устройств, реализующих описываемый способ отдельно, т. к. он является параметром помехозащищенности для конкретной реализации способа в зависимости от области его применения, например для устройств обнаружения изменения положения быстроперемещающегося объекта, для устройств обнаружения изменения положения стационарного объекта, для противопожарных устройств, для устройств охранной сигнализации и т.п.
Для повышения качества обнаружения изменений во всем ограниченном объеме целесообразно кроме координат образа вектора состояния акустического поля вычислять градиент акустического поля в локальной точке приема акустического сигнала. Это позволяет точнее оценивать величину ожидаемых изменений разностного вектора  и качественнее проводить корреляционную обработку сигналов, характеризующих эти изменения и реальные изменения в ограниченном объеме, которые определяют характерные нарушения в этом объеме, а не случайные флюктуации или помехи.
и качественнее проводить корреляционную обработку сигналов, характеризующих эти изменения и реальные изменения в ограниченном объеме, которые определяют характерные нарушения в этом объеме, а не случайные флюктуации или помехи.
Таким образом, вычислитель 8 матрицы состояния акустического поля вычисляет еще и градиент поля в локальной точке приема, который предста- вляет собой вектор вида:
где gx; gy; gz - величины градиентов акустического поля по соответствующей оси.
Вектор  характеризует приращение поля в данной точке, и его представляется возможным вычислить благодаря тому, что элементарные приемники приемника 3 могут быть разнесены в пространстве и принимать акустические сигналы в различных точках локального объема, местоположение которых определяется конструктивным решением приемника 3.
характеризует приращение поля в данной точке, и его представляется возможным вычислить благодаря тому, что элементарные приемники приемника 3 могут быть разнесены в пространстве и принимать акустические сигналы в различных точках локального объема, местоположение которых определяется конструктивным решением приемника 3.
Аналогично вычисляется опорный градиент поля :
где gxb; gyb; gzb - величины опорных градиентов акустического поля по соответствующей оси.
Таким образом, вычислители 8 и 9 кроме координат вычисляют и градиент акустического поля и результат сводится в матрицу M состояния акустического поля и опорную матрицу Mb состояния акустического поля соответственно:
Дальнейшая обработка матриц проводится аналогично описанному для векторов  за тем исключением, что матрица Mb поступает на блок 7 принятия решений для оптимизации порога P и интервала интегрирования T, так как, чем больше
за тем исключением, что матрица Mb поступает на блок 7 принятия решений для оптимизации порога P и интервала интегрирования T, так как, чем больше  , тем больше ожидаемые рассогласования между M и Mb, которые отражает соответственно разностная матрица
, тем больше ожидаемые рассогласования между M и Mb, которые отражает соответственно разностная матрица
Mr = Mb-M,
вычисляемая в вычислителе 6 рассогласования, и тем больше должен быть порог P и меньше интервал интегрирования T, и, наоборот, чем меньше величина векторов  и меньше
и меньше  , тем меньше ожидаемое рассогласование между M и Mb. Из вышеизложенного следует, что желательна оптимизация устройства по ожидаемому рассогласованию между M и Mb.
, тем меньше ожидаемое рассогласование между M и Mb. Из вышеизложенного следует, что желательна оптимизация устройства по ожидаемому рассогласованию между M и Mb.
Функциональная схема, с учетом приведенных выше уточнений, изображена на фиг. 2.
Устройство дополнительно содержит устройство 11 корректировки порога и интервала интегрирования, вход данных которого связан с выходом данных запоминающего устройства 5, а выход - с управляющим входом блока 7 принятия решений.
Устройство 11 оценивает величину вектора  и градиент акустического поля и в соответствии с графиками для поправочных коэффициентов, приведенными на фиг.3 и 4, вычисляет поправочные коэффициенты и передает их для обработки в блок 7.
и градиент акустического поля и в соответствии с графиками для поправочных коэффициентов, приведенными на фиг.3 и 4, вычисляет поправочные коэффициенты и передает их для обработки в блок 7.
На фиг.3 зависимость поправочного коэффициента cp для порога P показана сплошной линией, а зависимость коэффициента ct для интервала интегрирования T показана пунктиром.
На фиг.4 зависимость поправочного коэффициента qp для порога P показана сплошной линией, а для коэффициента qt для интервала интегрирования T - пунктиром.
Приведенные на фиг. 3 и 4 графики поправочных коэффициентов носят качественный характер, так как начальные значения для функций cp = f ( ) и qp = f(
) и qp = f( ) и значения ct и qt для функций cf = f(
) и значения ct и qt для функций cf = f( ) и gt = f(
) и gt = f( ), к которым стремится соответствующая кривая, а также градиенты этих функций зависят от типа устройств, реализующих описываемый способ, и от их помехозащищенности. В частности, начальные значения поправочных коэффициентов никогда в реальном устройстве не могут быть равны нулю, а для ct и gt и бесконечности, так как это приводит к резкому снижению устойчивости устройства к помехам и к случайным флюктуациям.
), к которым стремится соответствующая кривая, а также градиенты этих функций зависят от типа устройств, реализующих описываемый способ, и от их помехозащищенности. В частности, начальные значения поправочных коэффициентов никогда в реальном устройстве не могут быть равны нулю, а для ct и gt и бесконечности, так как это приводит к резкому снижению устойчивости устройства к помехам и к случайным флюктуациям.
На фиг.5 устройство дополнительно содержит постоянное запоминающее устройство (ПЗУ) 12 набора ожидаемых изменений матрицы образа акустического поля, формирователь-корректор 13, вычислитель 14 корреляции и нормирующий усилитель 15. Выход формирователя 1 излучения связан с входом нормирующего усилителя 15, выход которого связан с первым входом формирователя-корректора 13. Выход данных вычислителя 6 рассогласования связан с вторым входом данных формирователя-корректора 13. Выход данных ПЗУ 12 связан с третьим входом данных формирователя-корректора 13. Управляющий выход формирователя-корректора 13 связан с управляющим входом ПЗУ 12, выход данных которого связан с четвертым входом данных формирователя-корректора 13, выход данных которого связан с первым входом данных вычислителя 14 корреляции. Выход данных вычислителя 6 рассогласования связан с вторым входом данных вычислителя 14 корреляции. Блок 7 принятия решений выполнен с возможностью корректирования решения согласно результатам корреляционной обработки и выполнен с первым дополнительным входом, связанным с выходом вычислителя 14 корреляции.
Для повышения качества обнаружения изменений во всем ограниченном объеме, увеличения помехозащищенности и устойчивости к случайным флюктуациям акустического поля введенные устройства (фиг.5) обеспечивают корреляционный анализ между разностной матрицей Mr и матрицей Mk, опорной для корреляционного анализа и отражающей ожидаемое поведение разностной матрицы при изменениях в ограниченном объеме.
Работает устройство (фиг.5) следующим образом.
Формирователь-корректор 13 адаптивных изменений матрицы Mk, основываясь на сигналах, соответствующих разностной матрице Mr, из набора записанных сигналов в ПЗУ 12 выбирает наиболее близкую аппроксимацию реального поведения разностной матрицы Mr. Далее, опираясь на реально существующие условия, отраженные в матрицах Mr и Mb, формирователь-корректор 13 корректирует ожидаемое поведение матрицы Mk реально существующим условиям и передает сигналы, соответствующие изменению матрицы Mk, на вычислитель 14 корреляции. Вычислитель 14 осуществляет корреляционный анализ между Mk и Mr по отдельности для векторов  соответственно, и вычисленную функцию корреляции передает блоку принятия решения 7.
соответственно, и вычисленную функцию корреляции передает блоку принятия решения 7.
Нормирующий усилитель 15 подготавливает сигнал, генерируемый формирователем 1, для дальнейшей обработки. Надо отметить, что связь формирователя-корректора 13 с формирователем 1 через нормирующий усилитель 15 необходима для формирования адекватных изменений матрицы Mk генерируемому для излучения сигнал. Это особенно важно, если формирователь 1 сигнала излучения генерирует сложный немонохроматический сигнал.
Очевидно, что характер изменения Mk во времени от момента t0 можно задавать только набором ожидаемых изменений матрицы Mk, при этом можно обойтись без формирователя-корректора 13 адаптивных изменений матрицы Mk и связей, ему присущих, однако это потребует соответственно для ПЗУ 12 существенно большего ресурса памяти, так как увеличивается количество необходимых к запоминанию ожидаемых изменений разностного сигнала и градиента акустического поля.
Сигнал, соответствующий корреляционной функции, поступает на блок 7 принятия решений, и, если она больше порога, блок 7 вырабатывает тревожный сигнал.
Рассмотрим на простом примере особенности, присущие корреляционной обработке.
Пусть на приемник 3 воздействует тональная помеха с частотой ωp , отстоящей от несущей частоты сигнала на Δω , тогда на выходе данных вычислителя 6 рассогласования будет присутствовать сигнал с частотой Δω , обусло- вленный биениями между тональной помехой и несущей частотой излучаемого сигнала.
Очевидно, что без корреляционной обработки устройство выработает тревожный сигнал, однако в результате корреляционной обработки выясняется, что корреляция поведения подобного сигнала биений с ожидаемыми изменениями величины вектора рассогласования Dk мала, то есть такое поведение разностного сигнала не характерно для реальных изменений в ограниченном объеме, поэтому блок 7 принятия решений не выработает тревожный сигнал.
При проектировании устройства и вводе информации в ПЗУ 12 и, соответственно, при дальнейшей корреляционной обработке можно пойти от обратного, то есть записать в ПЗУ 12 характерное поведение поля для флюктуаций, тогда блок 7 принятия решений должен обрабатывать результат корреляционной обработки не по принципу дополнения к основному каналу, а по принципу исключения, то есть, когда корреляция высока, тревожный сигнал не вырабатывается, т.к. данное рассогласование есть результат воздействия помехи или флюктуации акустического поля.
Устройство (фиг.6) дополнительно содержит ключевое устройство 16 и пороговое устройство 17. Выход измерителя 4 связан с входом вычислителя 9 опорной матрицы состояния акустического поля через ключевое устройство 16, а управляющий вход ключевого устройства 16 связан с выходом данных вычислителя 6 рассогласования через пороговое устройство 17.
Введение данной обратной связи позволяет оптимизировать коррекцию опорной матрицы Mb к естественным уходам распределения акустического поля в ограниченном объеме.
Оптимизированная цепь вычисления и запоминания опорной матрицы работает следующим образом. Если на выходе вычислителя 6 появляется сигнал рассогласования матриц M и Mb выше некоторого порога, то пороговое устройство 17 вырабатывает сигнал запрета, передаваемый ключевому устройству 16, которое по этому сигналу прерывает дальнейшую обработку входного сигнала в цепи вычисления опорной матрицы для того, чтобы исключить искажения матрицы Mb за время, когда устройство фиксирует изменения акустического поля, причиной которых естественные уходы акустического поля могут и не являться. Таким образом, когда на выходе вычислителя 6 появляется сигнал, начинается его обработка с целью выяснения причины появления рассогласования, независимо от того, есть ли это естественный уход, флюктуация, помеха и т. п.
С учетом того, что чувствительность P(U) представляет собой функцию не менее второго порядка, задача установления рабочей точки устройства является задачей на поиск экстремальных точек оптимизации и не имеет тривиальных решений, а также, учитывая изложенное при анализе аналогов, можно сделать вывод, что устройства, охватывающие весь внутренний объем, целесообразно проектировать с оптимизацией уровня излучаемого сигнала и, следовательно, величины среднего ожидаемого рассогласования матрицы M и опорной матрицы Mb.
Для реализации такой оптимизации устройство (фиг.7) дополнительно содержит блок 18 запуска теста, формирователь 19 тестового сигнала, нормирующий блок 20, переключающий блок 21, регулирующий блок 22, запоминающее устройство 23 уровня регулировки, измеритель 24 уровня тестового сигнала, блок 25 сравнения и управляющий блок 26. Формирователь 1 сигнала излучения связан с первыми входами нормирующего блока 20 и переключающего блока 21. Выход формирователя 19 тестового сигнала связан с вторым входом нормирующего блока 20, выход которого связан с вторым входом переключающего блока 21. Выход переключающего блока 21 связан с сигнальным входом регулирующего блока 22, выход которого связан с входом излучателя 2 акустического сигнала. Выход приемника 3 акустического сигнала дополнительно связан с последовательно подсоединенными измерителем 24 уровня тестового сигнала, блоком 25 сравнения и управляющим блоком 26. Управляющий выход управляющего блока 26 связан с первым входом данных регулирующего блока 22 и с первым входом данных запоминающего устройства 23 уровня регулировки. Управляющий вход запоминающего устройства 23 и управляющий вход ключевого устройства 21 связаны с первым управляющим выходом блока 18 запуска теста. Блок 7 принятия решений выполнен с возможностью запрета формирования выходного сигнала при тестировании, и его второй дополнительный вход запрета связан с первым управляющим выходом блока 18 запуска теста. Управляющий выход управляющего блока 26 связан с управляющим входом блока 18 запуска теста, второй управляющий выход которого связан с управляющим входом формирователя 19 тестового сигнала, при этом входы и выходы данных запоминающего устройства 23 связаны с входами и выходами данных регулирующего блока 22 соответственно.
Устройство (фиг.7) работает следующим образом.
Блок 18 запуска теста отвечает за выбор тестового режима в начальный момент запуска, а также за выдерживание интервала времени, необходимого для осуществления тестового режима (и не более этого интервала). Блок 18 запускает формирователь 19 тестового сигнала, переводит переключающий блок 21 в положение излучения тестового сигнала, разрешает запоминающему устройству 23 уровня регулировки изменять записанные в нем данные и запрещает блоку 7 принятия решений вырабатывать тревожный сигнал.
Формирователь 19 тестового сигнала формирует выбранный при проектировании тестовый сигнал, параметры которого задаются при проектировании конкретной реализации устройства и могут быть различными. Единственное требование к этому тестовому сигналу - достаточная широкополосность его спектра для того, чтобы избежать возникновения стационарной стоячей волны в ограниченном объеме и при этом обеспечить измерение интегральной эффективной поверхности рассеяния тестируемого ограниченного объема, которая зависит от свойств среды, в которой распространяется акустическая волна, и от акустических свойств границ - разделов сред (то есть от отражающей и поглощающей способности границ, составляющих этот ограниченный объем). Нормирующий блок 20 нормирует величину тестового сигнала к зондирующему, который формируется формирователем 1. Переключающий блок 21 по команде блока 18 запуска теста переключает сигнал, поступающий на излучатель 2, с зондирующего сигнала на тестовый сигнал и через регулирующий блок 22 сигнал поступает на излучатель 2 акустического сигнала, который излучает тестовый сигнал в ограниченный объем. Приемник 3 принимает тестовый сигнал в локальной точке ограниченного объема, и принятый сигнал поступает на измеритель 24 уровня тестового сигнала. Измеренный уровень тестового сигнала поступает на блок 25 сравнения, который сравнивает этот уровень с порогом Pt и на своем выходе формирует сигналы ψ2,ψ1,ψ0 , означающие, что уровень больше, меньше или равен порогу соответственно. Эти сигналы ψ2,ψ1,ψ0 поступают на управляющий блок 26, который управляет регулирующим блоком 22. Регулирующий блок 22 в процессе регулировки непрерывно передает данные запоминающему устройству 23. Когда уровень сигнала равен порогу, регулирующий блок 22 вырабатывает управляющий сигнал для запоминающего устройства 23 уровня регулировки, чтобы запомнить текущее состояние регулирующего блока 22, а также вырабатывает управляющий сигнал блоку 18 запуска теста о том, что тест закончен. Блок 18 запрещает формирователю 19 формировать тестовый сигнал, переводит переключающий блок 21 в положение на пропуск зондирующего сигнала, запрещает запоминающему устройству 23 изменять записанные в нем данные, а те данные, которые были записаны в блок 23, возвращаются на регулирующий блок 22 в качестве управляющих им, и блоку 7 разрешается вырабатывать тревожный сигнал.
Устройство (фиг. 8) дополнительно к предыдущей функциональной схеме содержит регулирующий элемент автоматической регулировки усиления (АРУ) 27 канала излучателя, регулирующий элемент АРУ 28 канала приемника, измеритель 29 величины помехи, вычислитель 30 состояния регулирующих элементов цепей АРУ, блок 31 управления, запоминающее устройство 32 состояния регулирующих элементов цепей АРУ. Выход переключающего блока 21 связан с сигнальным входом регулирующего блока 22 через регулирующий элемент АРУ 27. Выход приемника 3 акустического сигнала дополнительно связан с последовательно соединенными регулирующим элементом АРУ 28, измерителем 29 величины помехи и вычислителем 30 состояния регулирующих элементов цепей АРУ. Первый управляющий выход вычислителя 30 связан с входом блока 31 управления, а второй выход данных - с входом данных запоминающего устройства 32. Управляющий выход блока 31 управления связан с управляющим входом запоминающего устройства 32 и с вторым дополнительным входом запрета блока 7 принятия решения. Выход данных запоминающего устройства 32 связан с входами данных регулирующих элементов АРУ 27 и 28.
Введение цепей АРУ позволяет увеличить помехозащищенность, когда в реально существующих условиях поведение акустических и электромагнитных помех непредсказуемо, а также позволяет поддерживать отношение величины полезного сигнала к величине помехи в допустимых пределах, при которых устройство устойчиво отличает помеху от сигнала, а в случае отсутствия помех - минимизировать величину излучаемого в ограниченный объем зондирующего сигнала.
Устройство работает следующим образом.
На приемник 3 кроме полезного сигнала, который излучается в ограниченный объем, воздействует и сигнал помехи. При этом, если сигнал помехи имеет большой уровень, то это может привести к ошибке в каналах обработки сигнала и, соответственно, к ложному срабатыванию. Для исправления такой ситуации аддитивная смесь полезного сигнала и помехи
S = Sи + Sп
подается на измеритель 29 величины помехи, который из спектра принимаемого сигнала S отфильтровывает ту область, где однозначно присутствует полезный сигнал Sи, а оставшуюся часть спектра и, соответственно, оставшуюся часть помехи использует для дальнейшей обработки, которая заключается в измерении величины оставшейся части помехи.
Сигнал, соответствующий величине отфильтрованной помехи, передается на вычислитель 30 состояния регулирующих элементов цепей АРУ, который по величине этого сигнала вычисляет оптимальное соотношение коэффициентов усиления в канале излучателя 1 и канале приемника 3 для минимизации отношения величины помехи к величине полезного сигнала. Вычислитель 30 передает вырабатываемый им сигнал на запоминающее устройство 32 состояния регулирующих элементов цепей АРУ и на блок управления 31. Блок управления 31 фиксирует окончание обработки вычислителем 30 и вырабатывает сигнал, разрешающий запоминающему устройству 32 переписать те данные, которые были до начала обработки вычислителем 30, на данные, которые вычислитель 30 выработал в результате обработки помехи. Запоминающее устройство 32 запоминает эти данные и передает их в качестве управляющих на регулирующие элементы АРУ 27 и 28 соответствующих каналов.
Очевидно, что для сохранения устойчивости устройства необходимо, чтобы данные о соотношении коэффициентов усиления канала приемника 3 и канала излучателя 1 были переданы для обработки блоку 7 принятия решения.
Оптимизировать отношение величины полезного сигнала к величине помехи удается благодаря тому, что величина сигнала помехи, попадающего на обрабатывающие цепи канала приемника 3, зависит только от чувствительности (то есть трактового коэффициента усиления) канала приемника 3, а величина полезного сигнала зависит также от трактового коэффициента усиления излучателя 2. Таким образом, уменьшением коэффициента усиления приемника и увеличением коэффициента усиления излучателя достигается оптимизация величины полезного сигнала к величине помехи - это означает, что величина помехи становится меньше допустимого уровня Sпд, соответствующего собственной устойчивости устройства к помехам.
На фиг.9 и 10 приведены регулировочные кривые.
На фиг. 9 приведена область допустимых значений коэффициентов усиления Kуизл и Kупр (показана штриховкой), при этом она ограничена максимальным значением Kуизл и Купр, которые реализованы в устройстве, а ее ширину определяет собственная помехоустойчивость устройства. На фиг. 10 для примера приведена величина шумовой помехи Sпд. Из соотношения этих двух величин вычисляется необходимый Kупр, а из области допустимых значений (фиг.9) выбирается необходимый Kуизл для компенсации изменения величины полезного сигнала в канале приемника 3.
Приведенная на фиг. 10 область допустимых значений носит качественный характер, так как реальная крутизна и форма кривых, ее ограничивающих, ширина, реальные максимальные Kуизл и Kупр зависят от конкретной реализации устройства.
Необходимо отметить, что цепи АРУ выполняют также минимизацию излучаемого сигнала при отсутствии помехи, когда уровень помехи существенно меньше величины допустимой помехи Sпд. Достигается это за счет того, что вычислитель 30 состояния регулирующих элементов цепей АРУ выполняет операцию, обратную описанной выше, то есть если величина помехи существенно меньше Sпд, то вычислитель 30 начинает увеличивать Kупр и уменьшать Kуизл до тех пор, пока величина помехи не станет соизмеримой с Sпд или достигнет своего технического предела один из Kуизл или Kупр.
Устройство (фиг. 11) дополнительно содержит первый и второй предварительные усилители (ПУ) 33 и 34 соответственно, аналоговое вычитающее устройство 35, синхронный детектор (СД) 36, формирователь 37 опорного сигнала, фильтр 38 синхронного детектора, аналого-цифровой преобразователь (АЦП) 39, согласующее устройство 40, сигнальное устройство 41, преобразователь 42 цифрового сигнала в аналоговый, согласующий усилитель 43, усилитель мощности 44. Вход первого ПУ 33 связан с первым каналом приема приемника 3, а вход второго ПУ 34 - с вторым каналом приема приемника 3, и их выходы связаны с сигнальными входами аналогового вычитающего устройства 35, выход которого связан с входом регулирующего элемента АРУ 28 канала приемника. Выход регулирующего элемента АРУ 28 связан с измерителем 29 величины помехи через последовательно связанные СД 36, фильтр 38 синхронного детектора, АЦП 39. Выход формирователя 37 опорного сигнала связан с опорным входом СД 36 и с пятым входом формирователя-корректора 13. К выходу АЦП 39 подсоединены параллельно измеритель 4 и измеритель 24 уровня тестового сигнала. Выход переключающей схемы 21 связан с сигнальным входом регулирующей схемы 22 через последовательно соединенные преобразователь 42 цифрового сигнала в аналоговый и регулирующий элемент АРУ 27 канала излучателя 1. Выход регулирующей схемы 22 связан с входом излучателя 2 акустического сигнала через последовательно соединенные согласующий усилитель 43 и усилитель мощности 44, а вход сигнального устройства 41 связан через согласующее устройство 40 с выходом блока 7 принятия решений, при этом управляющий выход блока 7 принятия решения связан с управляющим входом аналогового вычитающего устройства.
Устройство (фиг.11) работает следующим образом.
Каждый из каналов приемника 3 акустического сигнала преобразует акустический сигнал в электрический и передает его на соответствующий первый и второй ПУ 33 и 34, выполненные с возможностью полосовой фильтрации принимаемого сигнала. С первого и второго ПУ 33 и 34 сигналы поступают на аналоговое вычитающее устройство 35, которое выполнено с возможностью подключения к своему выходу разностного сигнала или сигнала первого канала приемника 3 или второго канала приемника 3 в зависимости от управляющего сигнала, далее сигнал через регулирующий элемент АРУ 28 поступает на СД 36 и затем на фильтр 38 синхронного детектора, который установлен для увеличения помехозащищенности устройства. Формирователь 37 вырабатывает опорный сигнал для синхронного детектора. Фильтр 38 синхронного детектора выполнен с возможностью дополнительного усиления, и с него сигнал поступает на АЦП 39, который предусмотрен для согласования аналоговой части устройства с цифровой для последующей обработки сигнала в цифровом виде, в соответствии с вышеизложенным при описании других вариантов устройств.
Формирователь-корректор 13 выполнен с пятым входом, связанным с выходом формирователя 37 опорного сигнала для формирования изменений матрицы Mk, адекватных генерируемому опорному сигналу.
В канал излучателя 2 также введены дополнительные блоки: согласующий усилитель 43, выполненный с возможностью полосовой фильтрации излучаемого сигнала для уменьшения наводок на излучатель 2 акустического сигнала, и усилитель мощности 44.
В устройство введено также сигнальное устройство 41 с соответствующим ему согласующим устройством 40. Когда тревожный сигнал, вырабатываемый блоком 7 принятия решений, поступает на согласующее устройство 40, он преобразуется для выбранного вида сигнального устройства 41, а сигнальное устройство 41 передает его в соответствии с выбранным каналом связи и принятым интерфейсом.
В результате объединения всех вышеописанных вариантов устройств возможно создание специализированного устройства с высокой надежностью функционирования, наиболее эффективно обеспечивающего решение поставленной задачи.
Наиболее успешно заявленные способ обнаружения изменения положения объекта и устройство, реализующее этот способ, могут быть использованы для создания различного рода систем обнаружения, в том числе для устройств охранной и противопожарной сигнализации.
Способ обнаружения изменения положения объекта и устройство для его реализации относятся к радиотехнике и могут быть использованы в устройствах противопожарной и охранной сигнализации. Способ включает зондирование акустическим сигналом ограниченного разделом сред пространства, прием отраженного сигнала. В способе принимают сигнал, представляющий собой линейную суперпозицию акустических волн, измеряют его амплитудные и фазовые характеристики, по ним определяют матрицу параметров, соответствующую положению узлов и пучностей стоячей акустической волны, запоминают эту матрицу и при изменении по меньшей мере одного из параметров матрицы судят об изменении положения объекта. Устройство содержит формирователь сигнала излучения, излучатель акустического сигнала, приемник акустического сигнала, измеритель, запоминающее устройство, вычислитель рассогласования, блок принятия решений, при этом выход формирователя сигнала излучения связан с входом излучателя акустического сигнала. Приемник акустического канала выполнен многоканальным с возможностью приема по меньшей мере двух акустических сигналов, измеритель выполнен с возможностью измерения амплитудных и фазовых характеристик, введены вычислитель матрицы состояния акустического поля и вычислитель опорной матрицы состояния акустического поля, причем выход измерителя связан с входом запоминающего устройства через вычислитель опорной матрицы состояния акустического поля и с вторым входом вычислителя рассогласования через вычислитель матрицы состояния акустического поля. 2 с. и 8 з.п. ф-лы, 11 ил.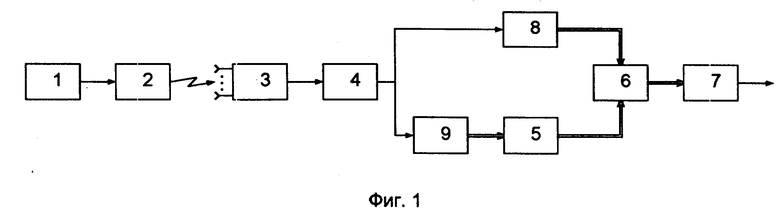
| SU, авторское свидетельство, 291222, кл | |||
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| SU, авторское свидетельство, 1821773, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
