Предлагаемое изобретение относится к области лазерной локации, в частности к лазерным системам связи с космическими объектами, а также к системам для доставки излучения на космические и воздушные объекты.
Известен способ наведения излучения на объект [1], заключающийся в формировании изображения объекта, определении его координат, определении наиболее яркой точки объекта и наведении на нее рабочего лазерного излучения.
К недостаткам известного способа следует отнести невысокую точность наведения, вследствие получения изображения объекта и формирования рабочего лазерного излучения на различных длинах волн, что приводит, в силу наличия дисперсии, к ошибке наведения Δ, вызванной рассогласованием спектров приемного и передающего каналов. Дополнительная ошибка наведения в известном способе [1] обусловлена отсутствием возможности селекции изображения объекта от окружающего фона (фон неба, звезд и т.д.).
В качестве прототипа выбран способ наведения излучения на объект [2], заключающийся в формировании изображения объекта, определении его угловых координат θ0, формировании вспомогательного лазерного излучения, оптически связанного с диаграммой направленности рабочего лазерного излучения, определении координат энергетического центра θц вспомогательного лазерного излучения, формировании в момент времени t1 рабочего лазерного излучения в направлении θ0-θц, причем формирование вспомогательного лазерного излучения осуществляют непрерывно в видимом диапазоне спектра, например, на длине волны λраб = 0,63 мкм, отличной от рабочей длины волны, а формирование изображения объекта осуществляют в видимом диапазоне.
К недостаткам известного способа относится невысокая точность наведения, обусловленная различием длин волн рабочего и вспомогательного лазерных излучений, что приводит, вследствие атмосферной дисперсии канала распространения, к ошибкам наведения излучения на объект.
Кроме того, при осуществлении наведения лазерного излучения на движущийся космический объект необходимо обеспечить прием отраженного сигнала в широкой полосе, включающей возможный доплеровский сдвиг сигнала ΔYдопmax. Это приводит к существенному снижению эффективности и помехозащищенности приема вследствие регистрации и накопления шумов в широкой полосе по сравнению с узкополосным приемом сигналов от неподвижного или медленно движущегося объекта. При этом, вследствие влияния шумов, ухудшается точность определения координат объекта и точность наведения лазерного излучения на движущийся объект.
Достигаемым техническим результатом является повышение точности наведения лазерного излучения на движущиеся космические и воздушные объекты.
Новый технический результат достигается тем, что:
1. В известном способе, заключающемся в формировании вспомогательного лазерного излучения, подсвете им объекта, приеме, формировании изображения объекта, определении его угловых координат Θ0 и формировании в направлении Θ0 рабочего лазерного излучения на длине волны λраб, после приема отраженного от объекта излучения осуществляют его спектральную селекцию на рабочей длине волны λраб, осуществляют определение доплеровского сдвига частоты ΔYдоп, отраженного от объекта излучения, осуществляют коррекцию частоты вспомогательного лазерного излучения на величину доплеровского сдвига частоты -ΔYдоп и подсвечивают объект вторым импульсом вспомогательного лазерного излучения со смещенной частотой излучения, а формирование рабочего лазерного излучения осуществляют с временной задержкой, меньшей времени замороженности атмосферы относительно момента времени приема второго импульса, отраженного от объекта излучения.
2. Определение доплеровского сдвига частоты ΔYдоп, отраженного от объекта излучения осуществляют путем формирования последовательности импульсов вспомогательного лазерного излучения, подсвета объекта последовательностью сформированных импульсов излучения, осуществляют дискретный сдвиг частоты Yi каждого последующего импульса вспомогательного лазерного излучения относительно частоты излучения Yi-1 предыдущего импульса лазерного излучения, осуществляют прием, спектральную селекцию отраженного от объекта излучения на рабочей длине волны λраб, определяют амплитуду Ai отселектированного сигнала каждого отраженного от объекта импульса лазерного излучения и определяют лазерный импульс с наибольшей амплитудой Ai=Am отселектированного на рабочей длине волны λраб сигнала, при этом за величину доплеровского сдвига частоты ΔYдоп принимают разность Ym-Yp между частотой излучения Ym лазерного импульса с наибольшей отселектированной амплитудой и частотой Yp рабочего лазерного излучения, соответствующей длине волны λраб = 1/Yp:ΔYдоп = Ym-Yp.
3. В известное устройство, содержащее установленные на первой оптической оси источник рабочего лазерного излучения с блоком накачки, первое поворотное зеркало с приводом зеркала и блоком управления приводом зеркала, расположенные на второй оптической оси, первую фотоприемную матрицу, первый световой затвор, объектив, первое светоделительное зеркало, лазерный усилитель с блоком накачки, телескопическую систему, а также задающий лазерный генератор с блоком накачки, матричный световой модулятор селектора угловых мод с блоком управления, блок обработки информации и формирователь временных интервалов, отличающееся тем, что введены первый и второй активные квантовые фильтры с блоками накачки, второй световой затвор, вторая фотоприемная матрица, отражательное вогнутое зеркало, второе светоделительное зеркало, блок смещения частоты задающего лазерного генератора, блок смещения частоты лазерного усилителя, второе поворотное зеркало с приводом зеркала и блоком управления приводом, расположенное на второй оптической оси, первый активный квантовый фильтр размещен между первым светоделительным зеркалом и лазерным усилителем, оптический вход источника рабочего лазерного излучения посредством отражательного вогнутого зеркала связан с оптическим входом второго активного квантового фильтра, оптический выход которого через второе светоделительное зеркало связан с матричным световым модулятором селектора угловых мод, а через второй световой затвор - с фоточувствительной площадкой второй фотоприемной матрицы, выход задающего лазерного генератора через первое светоделительное зеркало связан с оптическим входом лазерного усилителя, оптический вход телескопической системы оптически сопряжен с установленным на второй оптической оси вторым поворотным зеркалом, при этом блоки смещения частоты задающего лазерного генератора и лазерного усилителя подключены к блоку обработки информации, управляющие входы блоков накачки лазерного задающего генератора и лазерного усилителя, первого и второго активных квантовых фильтров, первого и второго световых затворов попарно подключены к соответствующим выходам формирователя временных интервалов, выходы первой и второй фотоприемных матриц подключены к блоку обработки информации, выходы которого подсоединены к блоку накачки источника рабочего лазерного излучения и к блоку управления матричным световым модулятором селектора угловых мод, блоки управления приводами первого и второго поворотных зеркал подсоединены к источнику внешнего целеуказания, выход которого подсоединен к блоку обработки информации, причем блок смещения частоты задающего лазерного генератора и блок смещения частоты лазерного усилителя выполнены в виде снабженных источниками тока соленоидов, внутри которых расположены соответственно задающий лазерный генератор и лазерный усилитель.
На фиг. 1 приведена блок-схема устройства, реализующего предложенный способ, где введены следующие обозначения:
1. Источник рабочего лазерного излучения с блоком накачки 2;
3. Поворотное зеркало;
4. Привод поворотного зеркала;
5. Блок управления приводом поворотного зеркала;
6. Отражательное вогнутое зеркало;
7. Второе поворотное зеркало (ПЗ);
8. Привод второго ПЗ;
9. Блок управления приводом второго ПЗ;
10. Телескопическая система;
11. Задающий лазерный генератор с блоком накачки 12;
13. Лазерный усилитель с блоком накачки 14;
15. Первый активный квантовый фильтр с блоком накачки 16;
17. Первое светоделительное зеркало;
18. Объектив;
19. Первый световой затвор;
20. Первая фотоприемная матрица (ФПМ);
21. Второй активный квантовый фильтр с блоком накачки 22;
23. Второе светоделительное зеркало;
24. Второй световой затвор;
25. Вторая фотоприемная матрица;
26. Матричный световой модулятор селектора угловых мод с блоком управления 27;
28. Блок обработки информации;
29. Формирователь временных интервалов;
30. Блок смещения частоты задающего лазерного генератора;
31. Блок смещения частоты лазерного усилителя;
32. Блок-распределитель сигналов внешнего целеуказания (в состав устройства не входит).
Высокоточное наведение лазерного излучения на объект осуществляют с помощью предложенного способа.
Устройство, реализующее предложенный способ, функционирует следующим образом.
По данным внешнего целеуказания (ВЦУ) ожидаемые координаты объекта поступают в блоки управления приводами 5 и 9 первого и второго поворотных зеркал 3 и 7. Блоки управления приводами 5 и 9 вырабатывают управляющие воздействия на привод поворотных зеркал 4 и 8. В результате поворотные зеркала 3 и 7 ориентируют таким образом, чтобы линии визирования канала рабочего лазерного излучения (поворотное зеркало 3) и приемопередающего канала вспомогательного лазерного излучения (поворотное зеркало 7) были направлены на точку ожидания объекта. При дальнейшем функционировании устройства поворотными зеркалами 3 и 7 управляют синхронно по данным ВЦУ и ориентируют в одном и том же направлении в пространстве.
Информация об ожидаемых координатах объекта по данным внешнего целеуказания поступает также в блок обработки информации 28, осуществляющий управление работой всего устройства. При этом информация поступает как об ожидаемых угловых координатах объекта θox, так и о наклонной дальности до объекта Rx. По полученным значениям дальности Rx блок обработки информации 28 вырабатывает строб-импульс по дальности, который поступает на управляющие входы первой и второй фотоприемных матриц 20, 25, и обеспечивает синхронное открытие ФПМ с временем ожидаемого момента прихода отраженного от объекта зондирующего сигнала.
Поворотные зеркала 3 и 7 имеют большую инерционность, поэтому высокоточное наведение рабочего лазерного излучения на объект осуществляют с помощью предложенного способа и его конкретной реализации, изложенной ниже.
Для высокоточного определения координат объекта в системах приемопередающего канала и канала рабочего лазерного излучения осуществляют подсвет объекта вспомогательным лазерным излучением в форме последовательности коротких импульсов.
Данное лазерное излучение формируют с помощью задающего лазерного генератора 11 и лазерного усилителя 13. Накачку активной среды задающего лазерного генератора 11 и лазерного усилителя 13 осуществляют с помощью блоков накачки 12, 14, в качестве которых могут быть использованы, например, батареи конденсаторов, разряд которых происходит от электронного ключа, управляемого формирователем временных импульсов 33. В качестве задающего лазерного генератора 11 и лазерного усилителя 13 могут быть использованы фотодиссоционные лазеры высокой импульсной мощности. Телескопической системой 10 обеспечивают как формирование пучка светового излучения с малой расходимостью, направляемого для облучения объекта, так и прием излучения, отраженного от объекта. Отраженное от объекта излучение принимают телескопической системой 10. Излучение проходит через лазерный усилитель 13 и поступает на вход активного квантового фильтра 15, накачка которого с помощью блока накачки 16, аналогичного блокам накачки 12, 14, осуществляется после формирования и излучения в ЗГ 11 и ЛУ 13 лазерного импульса для подсвета объекта. Таким образом, к моменту приема отраженного от объекта оптического импульса обеспечивают возбужденное состояние активной среды АКФ 15. При проходе через первый АКФ 15 оптического импульса, отраженного от объекта, осуществляют его усиление и спектральную селекцию. Активная среда в лазерном усилителе 13 к приходу отраженного от объекта импульса находится в невозбужденном состоянии и не оказывает воздействия на приходящий слабый оптический импульс.
Далее осуществляют формирование изображения объекта в плоскости фоточувствительной площадки фотоприемной матрицы 20 с помощью объектива 18. При этом оптический затвор 19 находится в открытом состоянии по управляющему сигналу с блока формирования временных интервалов 29. Оптический затвор 19 находится в закрытом состоянии в момент формирования в ЗГ 11 и ЛУ 13 мощного лазерного импульса подсвета объекта и служит для защиты матричного фотоприемника 20 от помехи обратного рассеивания, возникающей при прохождении мощного лазерного импульса через приемопередающий канал. Информация с выхода фотоприемной матрицы 20 поступает в блок обработки информации 28. Блоком обработки информации 28 реализуют операцию определения координат θ0 наиболее яркой точки объекта путем разделения потока излучения от изображения объекта на N парциальных потоков по числу фоточувствительных элементов в фотоприемной матрице 20 и выделения максимального из них.
Таким образом, за один цикл приема и обработки первого импульса вспомогательного лазерного излучения, отраженного от объекта осуществляют спектральную селекцию и усиление излучения, формирование изображения объекта, определение угловых координат θ0.
Вследствие быстрого движения наблюдаемого объекта отраженное от объекта лазерное излучение приобретает доплеровское смещение частоты, обусловленное величиной радиальной скорости объекта VR по линии визирования
ΔYдоп = 2VR/λраб.
Для космических объектов величина скорости VR может достигать нескольких километров в секунду, соответственно, доплеровский сдвиг частоты может достигать величины ΔYдоп = 1,5-2 ГГц на λраб, при полосе спектральной селекции ΔY = 300 МГц, что приводит к существенному снижению эффективности спектральной фильтрации и усиления отраженного от объекта сигнала и снижению точности определения координат объекта и точности наведения рабочего лазерного излучения. Для предотвращения этого явления в предлагаемом способе осуществляют определение доплеровского сдвига частоты ΔYνдоп, отраженного от объекта вспомогательного лазерного излучения.
Далее осуществляют коррекцию частоты излучения νi вспомогательного лазерного излучения на величину измеренного доплеровского сдвига частоты -ΔYдоп. Коррекцию осуществляют путем сдвига частоты вспомогательного лазерного излучения, формируемого в лазерном ЗГ 11 и лазерном усилителе 13 на величину -ΔYдоп. Смещение частоты формируемого вспомогательного лазерного излучения осуществляют одновременно в лазерном ЗГ 11 и лазерном усилителе 13 с помощью блоков смещения частоты 30, 31, на которые поступают одинаковые управляющие сигналы с выхода блока обработки информации 28, который вырабатывает сигнал управления, пропорциональный измеренному доплеровскому сдвигу частоты Δνдоп.
В результате частота Yi вспомогательного лазерного излучения оказывается скорректированной (смещенной) на величину -ΔYдоп относительно исходной частоты Yp, соответствующей рабочей длине волны λраб рабочего лазерного излучения: Yi = Yp-ΔYдоп. Второй импульс вспомогательного лазерного излучения с частотой Yi = Yp-ΔYдоп. излучают в сторону объекта через телескопическую систему 10 и поворотное зеркало 7.
Отраженное от объекта излучение вследствие доплеровского сдвига частоты ΔYдоп будет иметь частоту
Yотр = Yi+ΔYдоп = (Yp-ΔYдоп)+ΔYдоп = Yp,
точно совпадающую с частотой рабочего лазерного перехода в активном квантовом фильтре (АКФ) 15 и соответствующую рабочей длине волны λраб рабочего лазерного излучения. При этом спектральная селекция и усиление данного отраженного от объекта лазерного излучения в активном квантовом фильтре 15 осуществляются с наибольшей эффективностью в узкой спектральной полосе, что обусловливает высокую точность определения текущих угловых координат объекта θot.
Определение доплеровского сдвига частоты ΔYдоп, отраженного от объекта вспомогательного лазерного излучения, осуществляют следующим образом (п. 2 формулы изобретения).
Осуществляют формирование последовательности импульсов вспомогательного лазерного излучения и осуществляют подсвет объекта последовательностью сформированных импульсов.
При формировании импульсов вспомогательного лазерного излучения с помощью лазерного ЗГ 11 и лазерного усилителя 13 осуществляют дискретный сдвиг частоты Yi каждого последующего i-го лазерного импульса относительно частоты Yi-1 предыдущего излученного лазерного импульса на некоторую фиксированную величину  Сдвиг частоты осуществляют с помощью блоков смещения частоты 30, 31 по управляющим сигналам, формируемым в блоке обработки информации 28. Прием, спектральную селекцию и усиление отраженного от объекта излучения осуществляют с помощью активного квантового фильтра 15 в системе источника вспомогательного лазерного излучения на рабочей длине волны λраб и, соответственно, на частоте спектральной селекции Yp = 1/λраб,
Сдвиг частоты осуществляют с помощью блоков смещения частоты 30, 31 по управляющим сигналам, формируемым в блоке обработки информации 28. Прием, спектральную селекцию и усиление отраженного от объекта излучения осуществляют с помощью активного квантового фильтра 15 в системе источника вспомогательного лазерного излучения на рабочей длине волны λраб и, соответственно, на частоте спектральной селекции Yp = 1/λраб,
Частота спектральной селекции и усиления принимаемого (отраженного) лазерного сигнала Yp определяется параметрами АКФ 15 и является постоянной величиной. Величину дискрета ΔYλ смещения частоты излучения выбирают из необходимости обеспечения точной настройки частоты принимаемого сигнала на центральную частоту Yp полосы спектральной селекции сигналов в АКФ 15, что составляет, например, величину ΔYL = 0,2×ΔYакф, где ΔYакф - ширина полосы спектральной селекции АКФ 15 по уровню 0,5. При уменьшении величины дискрета ΔYL - точность настройки частоты сигнала на центральную частоту приема АКФ Yp может быть увеличена.
Частоту излучения Yi вспомогательного лазерного зондирующего сигнала, формируемого лазерным ЗГ 11 и ЛУ 13 дискретно увеличивают от импульса к импульсу в некотором диапазоне [Y1-Y2], центральная частота которого Y0=Yp соответствует рабочей частоте АКФ 15. Границы этого диапазона Y1, Y2 изменения частоты вспомогательного лазерного сигнала определяют в блоке обработки информации 28 по данным предварительного внешнего целеуказания (ВЦУ), которые содержат данные о возможных ожидаемых скоростях движения наблюдаемого космического объекта v по линии визирования. В блоке обработки информации 28 по этой информации осуществляют вычисление величины возможного (ожидаемого) доплеровского сдвига частоты отраженного от объекта лазерного излучения ΔYв по формуле ΔYв = 2vp/λраб. Диапазон изменения частот [Y1-Y2] выбирают таким, чтобы он перекрывал ожидаемый доплеровский сдвиг частоты: (Y1-Y2)/2 > ΔYв.
Каждый излученный импульс вспомогательного лазерного излучения имеет отличную от других импульсов частоту Yi. Отраженный от движущегося объекта импульс приобретает доплеровский сдвиг частоты ΔYiдоп = 2vpYi/c, где vp - скорость движения объекта по линии визирования (радиальная скорость), c - скорость света. Таким образом, частота принимаемого оптического сигнала равна Yio = Yi ± 2vp/c, где знак "+" или "-" определяется направлением движения объекта. После осуществления операции спектральной селекции и усиления отраженного от объекта лазерного импульса с помощью АКФ 15 на рабочей длине волны λраб, соответствующей частоты Yp, амплитуда отсепарированного импульса будет зависеть от точности совпадения частоты Yio отраженного сигнала с частотой Yp рабочего перехода активной среды в АКФ 15. Указанная амплитуда будет максимальной при совпадении частот Yio = Yp. Для фиксации этого момента совпадения частот осуществляют определение амплитуды каждого отселектированного и отраженного от объекта импульса вспомогательного лазерного излучения. Измерение амплитуды осуществляют с помощью фотоприемника 20 и блока обработки информации 28. Как было показано выше, блоком обработки информации 28 осуществляют определение координат θ0 наиболее яркой точки объекта путем разделения на N парциальных потоков сформированного изображения объекта в системе многоэлементного матричного фотоприемника 20 и определения элемента с наибольшей величиной зарегистрированной амплитуды (интенсивности). При этом измеренную величину амплитуды Aoi от наиболее яркой точки (элемента) изображения объекта оцифровывают и запоминают в блоке обработки 28, присваивают этой запомненной амплитуде номер i, соответствующий номеру i излученного лазерного импульса с частотой излучения Yi. С помощью блока обработки информации 28 из всех зарегистрированных импульсов сигналов, отраженных от объекта, определяют лазерный импульс i=m с наибольшей амплитудой Aoi имеющий излученную частоту Yi = Ym (m - номер излученного импульса). При этом частота отраженного от объекта зондирующего сигнала соответствует рабочей частоте Yp лазерного перехода в АКФ 15 Yoi = Yom = Yраб, а за величину доплеровского сдвига частоты ΔYдоп принимают разность частот ΔYдоп = Ym-Yp. Далее в системе источника вспомогательного лазерного излучения (ЗГ 11 и ЛУ 13) осуществляют непрерывную коррекцию частоты излучения Yi вспомогательного лазерного излучения на величину измеренного доплеровского сдвига -ΔYдоп. Блок обработки информации 28 вырабатывает управляющие сигналы, которые по системе обратной связи поступают на блоки 30, 31 смещения частоты излучения и обеспечивают смещение частоты Ym вспомогательного лазерного излучения на величину доплеровского сдвига -ΔYдоп. При этом обеспечивают поддержание максимальной величины амплитуды Aoi отраженного от объекта вспомогательного лазерного излучения, а частота отраженного от объекта вспомогательного лазерного излучения Ym = Yp соответствует частоте Yp рабочего лазерного перехода в активной среде АКФ 15. На этом операция определения величины доплеровского сдвига частоты ΔYдоп завершена.
Осуществляют подсвет объекта вторым импульсом вспомогательного лазерного излучения со смещенной частотой излучения.
Далее осуществляют прием отраженного от объекта второго импульса вспомогательного лазерного излучения, его спектральную селекцию и усиление на рабочей длине волны λраб в системе источника рабочего лазерного излучения поз. 3, 1, 6, 25, 27, 29. Спектральную селекцию и усиление отраженного от объекта вспомогательного излучения осуществляют с помощью второго активного квантового фильтра АКФ 21, который по своему устройству и характеристикам аналогичен АКФ 15. Вогнутое отражательное зеркало 6 выполняет функции фокусирующего элемента и формирует на фоточувствительной матрице 25 изображение объекта. Регистрацию сформированного после спектральной селекции в АКФ 21 изображения объекта осуществляют с помощью второй фотоприемной матрицы 25, также аналогичной по своим характеристикам и функции ФПМ 20. Блок обработки информации 28 осуществляет по сигналам, поступающим с выхода ФПМ 25 определение угловых координат объекта θ0 в системе источника рабочего лазерного излучения 1. При этом в отраженном от объекта лазерном излучении скомпенсирован доплеровский сдвиг частоты ΔYдоп, вызванный большой радиальной скоростью движения наблюдаемого космического объекта по направлению линии визирования (vр). Принимаемое от объекта излучение, вследствие компенсации доплеровского сдвига имеет частоту Y, точно совпадающую с рабочей частотой Yp лазерного перехода активной среды в активном квантовом фильтре 21. Это обуславливает наибольшую эффективность спектральной селекции в АКФ 21 принимаемого отраженного от объекта излучения и высокую точность определения угловых координат объекта θ0 в фотоприемной матрице 25. При этом измеренные в системе источника рабочего лазерного излучения угловые координаты θ0 содержат также информацию о фазовых неоднородностях (искажениях) турбулентной среды как по трассе распространения излучения по внешнему атмосферному каналу, так и по внутренней трассе распространения излучения внутри собственно системы формирования рабочего лазерного излучения поз. 3, 1, 6, 25. Каждому приемному элементу фотоприемной матрицы 25 соответствует определенный элемент в матричном световом модуляторе селектора угловых мод 26.
Разделение светового потока с выхода АКФ 21 на два геометрически идентичных световых потока, поступающих на фотоприемную матрицу 25 и матричный световой модулятор селектора угловых мод 26 осуществляется с помощью светоделительного полупрозрачного зеркала 23.
Момент времени приема tпр отраженного от объекта импульса излучения в фотоприемной матрице 25 фиксируют в блоке обработки информации 28, куда с выхода ФПМ 25 поступает соответствующий импульсный сигнал, содержащий также информацию об угловых координатах объекта θ0 Блок обработки информации 28 определяет элемент в матрице модуляторов 26, соответствующий элементу в матрице фотоприемников 25 с угловыми координатами объекта θ0 и выдает управляющий сигнал, обеспечивающий открывание данного элемента матричного светового модулятора селектора угловых мод 26. Одновременно с блока обработки информации 28 на блок накачки 2 подают сигнал, обеспечивающий накачку активной среды источника рабочего лазерного излучения 1. Этим обеспечивают формирование рабочего лазерного излучения на длине волны λраб и его излучение в направлении θ0 точно соответствующем направлению прихода отраженного от движущегося объекта вспомогательного лазерного излучения также на длине волны λраб с измеренными угловыми координатами θ0. На этом операции наведения рабочего излучения на движущийся объект завершены.
Источник рабочего лазерного излучения 1 работает в режиме лазера-усилителя без второго отраженного полупрозрачного зеркала на выходе источника 1, что исключает потери мощного излучения при наличии такого полупрозрачного зеркала в обычных схемах лазерных генераторов. Основным и единственным отражательным зеркалом резонатора источника 1 является отражательное зеркало, образованное матрицей модуляторов-отражателей 30, управляемых по сигналам блока управления 31. Начальным возбудителем режима генерации в источнике 1 является спонтанное излучение, возникающее под воздействием блока накачки 2 в активном веществе источника излучения 1.
Генерация рабочего лазерного излучения на длине волны λраб в источнике излучения 1 приводит к формированию совокупности угловых мод внутри некоторого телесного угла Ω. Вогнутое зеркало 6 и матричный модулятор 26 образуют селектор угловых мод, выделяющих угловую моду, соответствующую открытому элементу матричного модулятора, на который подано соответствующее управляющее воздействие от блока обработки информации 28. Вследствие различий в добротности резонатора для различных угловых направлений будет усиливаться только мода, соответствующая угловому направлению θ0, для которой модулятор 26 открыт и имеет высокий коэффициент отражения.
Активный квантовый фильтр 21 осуществляет дополнительное усиление лазерного излучения выделенной угловой моды после отражения от открытого элемента матричного модулятора 30, вследствие того, что в АКФ 21 и источнике рабочего излучения 1, используется одно и то же активное вещество и частоты рабочих лазерных переходов идентичны.
В момент времени генерации рабочего излучения в источнике 1 световой затвор 24 находится в закрытом состоянии для защиты высокочувствительной фотоприемной матрицы 25 от импульса рабочего лазерного излучения.
Момент времени излучения рабочего лазерного излучения tизл имеет временную задержку Δt3 относительно момента приема tпр излучения от объекта, зафиксированного в блоке обработки информации 28 Δt3 = tизл-tпр, не превышающую время замороженности атмосферы ta:Δt3 ≪ ta. Это обеспечивается высокой скоростью срабатывания матричного светового модулятора селектора угловых мод 26 и высокой скоростью обработки информации и формирования управляющих сигналов в блоке обработки информации 28. Усиленное в источнике 1 рабочее лазерное излучение через поворотное зеркало 3 направляют на объект.
Вследствие малого интервала времени Δt3 между приемом и определением координат объекта θ0 и формированием рабочего лазерного излучения в направлении θ0 меньшим времени замороженности атмосферы ta, фазовые искажения излучения по трассе распространения сохраняются неизменными как во время приема, так и во время обратного прохождения рабочего лазерного излучения и не ухудшают точность наведения излучения на объект. Осуществление спектральной селекции, формирования изображения объекта и определение его угловых координат на длине волны λраб = независимо от скорости движения объекта по линии визирования обеспечивает высокую эффективность спектральной фильтрации и высокую точность определения угловых координат и наведения излучения на движущийся объект.
При этом осуществление компенсации доплеровского смещения частоты отраженного от объекта излучения позволяет осуществить измерение угловых координат объекта непосредственно в системе источника рабочего лазерного излучения на длине волны λраб, что исключает возможность появления дополнительных ошибок рассогласования приемного и передающего каналов, так как диаграммы направленности на прием и в режиме формирования рабочего излучения совпадают. Это обеспечивается совпадением (совмещением) полей зрения фотоприемной матрицы 25 и матричного светового модулятора селектора угловых мод 26 и исключает необходимость дополнительной операции определения угловых координат θц центра диаграммы направленности рабочего лазерного излучения.
Применение предлагаемого способа и устройства для его осуществления в системах наведения излучения на движущиеся объекты позволяет получить следующие результаты:
обеспечить повышение точности наведения рабочего лазерного излучения на движущийся объект, за счет исключения ошибок определения координат движущегося объекта, возникающих при отсутствии компенсации доплеровского сдвига и снижении эффективности спектральной фильтрации и квантового усиления в условиях увеличения влияния фоновых шумов и помех при приеме слабых оптических зондирующих сигналов от космического объекта;
обеспечить повышение эффективности спектральной фильтрации и подавления фоновых помех, т.е. увеличить помехозащищенность локатора, вследствие компенсации доплеровского сдвига частоты и точной настройки отраженного от движущегося объекта и принимаемого излучения на весьма узкую частоту рабочего перехода активной среды активного квантового фильтра, соответствующую рабочей длине волны λраб источника рабочего лазерного излучения.
Устройство, реализующее предлагаемый способ выполнено на базе стандартных блоков и узлов.
Блоки смещения частоты излучения задающего лазерного генератора 30 и лазерного усилителя 31 представляют собой соленоиды, внутри которых расположены кюветы с активным веществом и блоками накачки. Соленоиды снабжены источниками тока, которые содержат электронные регуляторы величины тока I и обеспечивают по управляющим сигналам, поступающим от блока обработки информации 28 изменение величины тока, протекающего через соленоиды и формирование заданной величины напряженности магнитного поля внутри активной среды задающего лазерного генератора и лазерного усилителя. Данные соленоиды создают внутри активной среды лазерных генераторов продольное магнитное поле с управляемой величиной напряженности H, направление которого совпадает с направлением оптической оси. При наличии внутри активной среды магнитного поля происходит расщепление энергетических уровней благодаря эффекту Зеемана и смещение частоты генерируемого лазерного излучения, пропорционально величине напряженности продольного магнитного поля. Генерацию вспомогательного зондирующего лазерного излучения для подсвета объекта осуществляют с помощью ЗГ 11 и лазерного однопроходного усилителя 13, в которых смещение частоты рабочего лазерного перехода осуществляют синхронно и одновременно на одну и ту же величину. В активных квантовых фильтрах 15, 21 смещения частоты не осуществляют. В качестве активного квантового фильтра 15, 21 может быть использован, например, фотодиссоционный лазер с газовой средой на основе перфторалкилиодидов. Активный квантовый фильтр 15, 21 представляет собой малошумящий квантовый усилитель с высоким коэффициентом усиления и весьма узкой полосой пропускания. АКФ 15, 21 работает на частоте рабочего лазерного перехода Yp соответствующей рабочей длине волны λраб источника 1 и обеспечивает высокий коэффициент усиления (K > 104) на один проход и весьма узкую полосу спектральной фильтрации Δν = 300 МГц на рабочей длине волны. Этим обеспечивается высокая эффективность фильтрации отраженных от объекта сигналов в узкой спектральной полосе при наличии компенсации доплеровского сдвига и точной настройки принимаемого сигнала на полосу приема АКФ 15, 21. Высокий коэффициент усиления АКФ 15 и высокая чувствительность фотоприемной матрицы 20 позволяют компенсировать потери принимаемого сигнала в светоделительном зеркале 17 и обеспечить предельно высокую чувствительность приемного канала, содержащего АКФ 15 и фотоприемную матрицу 20, оптически сопряженных через полупрозрачное зеркало 17 и объектив 18, формирующий в плоскости ФПМ 20 изображение объекта.
Аналогичным образом второй приемный канал в системе источника рабочего излучения 1, содержащий второй АКФ 21 и ФПМ 25 имеет высокую чувствительность за счет обеспечения компенсации потерь во втором светоделительном зеркале 24 высоким коэффициентом усиления в АКФ 21. При этом наличие в первом и втором приемных каналах перед АКФ 15 и 21 лазерного усилителя 13 и источника излучения 1 не приводит к ослаблению принимаемого сигнала, отраженного от объекта, так как в момент приема активная среда в лазерном усилителе 13 и источнике 1 находится в ненакаченном (невозбужденном) состоянии и не оказывает воздействия на проходящий отраженный от объекта сигнал.
Предложенная схема компоновки приемопередающего канала формирования вспомогательного лазерного излучения, при которой лазерный усилитель зондирующего излучения 13 и высокочувствительный АКФ 15 расположены на одной оптической оси, обеспечивает работу устройства в режиме передачи и приема на одной совмещенной телескопической системе и позволяет использовать поворотное зеркало с меньшими габаритами, что позволяет повысить точность слежения за движущимися объектами. Развязка каналов осуществляется за счет различного времени накачки АКФ 15 и ЗГ 11 с ЛУ 13. Защита ФПМ 20 осуществляется с помощью оптического затвора 19, открываемого по сигналам с формирователя временных интервалов 29 на время ожидаемого прихода отраженного от объекта излучения, когда формирование зондирующего лазерного излучения в ЗГ 11 и ЛУ 13 завершено. Формирователь временных интервалов 29 выполнен, например, на стандартных электронных линиях задержки и обеспечивает формирование сетки управляющих импульсов для запуска блоков накачки ЗГ 11, ЛУ 13, АКФ 15 и 21 и открывания оптических затворов. Главный синхроимпульс поступает на ФВИ 29 с выхода блока обработки 28, который вырабатывает этот синхроимпульс по сигналам внешнего целеуказания 32, содержащих информацию о дальности до объекта. При этом формируется необходимый наиболее оптимальный режим облучения объекта последовательностью импульсов вспомогательного лазерного излучение и приема отраженных сигналов. Блок обработки информации 28 формирует также строб-импульсы, поступающие на фотоприемные матрицы 25, 20 и обеспечивающие высокочувствительный прием в ФПМ только в пределах времени действия строб-импульса и отсекающие помехи и шумы, воздействующие на ФПМ.
Источник рабочего лазерного излучения 1 представляет собой квантовый усилитель высокой мощности и содержит активную среду, например, фотодиссоционного лазера, аналогичную используемым в АКФ 15, 21 и в ЗГ 11 и ЛУ 13. Блоки накачки 2, 22, 12, 16, 14 являются аналогичными по принципу действия (например, батарея конденсаторов) и различаются только по используемой мощности накачки.
В качестве матричного светового модулятора селектора угловых мод 26 может быть использован, например, электрооптический матричный модулятор на основе кристаллов ДКДР, имеющий высокое быстродействие и высокий коэффициент отражения открытых элементов.
В качестве оптических затворов 24, 19 могут быть также использованы электрооптические затворы на кристаллах ДКДР или электромеханические затворы типа вращающегося диска с отверстиями.
В качестве блока обработки информации 28 использована стандартная ПЭВМ с блоками сопряжения для приема и передачи импульсных управляющих сигналов.
Использование в предлагаемом устройстве, реализующем предложенный способ, двух отдельных поворотных зеркал для канала формирования рабочего излучения и для приемопередающего канала вспомогательного лазерного излучения, позволяет использовать опорно-поворотные устройства с меньшим размером зеркала, по сравнению с вариантом компоновки на одном поворотном зеркале рядом расположенных приемного канала и канала рабочего лазерного излучения. Это позволяет за счет уменьшения габаритов и массы ОПУ повысить точность наведения излучения при работе по движущимся космическим объектам.
На предприятии проведены испытания экспериментального образца устройства, реализующего предложенный способ. Проведенные испытания подтвердили увеличение точности наведения при работе по быстродвижущимся объектам при использовании предложенного способа и устройства для его реализации.
Источники информации
1. Авторское свидетельство СССР N 321891, кл. G 01 S 17/00, 17.08.88.
2. Патент РФ 2048686, 1995.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЛАЗЕРНОЙ ЛОКАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2152056C1 |
| СПОСОБ ЛАЗЕРНОЙ ЛОКАЦИИ И ЛАЗЕРНОЕ ЛОКАЦИОННОЕ УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2183841C1 |
| СПОСОБ НАВЕДЕНИЯ ИЗЛУЧЕНИЯ НА ОБЪЕКТ | 1991 |
|
RU2110079C1 |
| СПОСОБ ДОСТАВКИ ИЗЛУЧЕНИЯ НА ДВИЖУЩИЙСЯ ОБЪЕКТ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2191406C1 |
| СПОСОБ ДОСТАВКИ ИЗЛУЧЕНИЯ НА ДВИЖУЩИЙСЯ ОБЪЕКТ И КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2124740C1 |
| СПОСОБ СПЕКТРАЛЬНОЙ ФИЛЬТРАЦИИ ОПТИЧЕСКИХ СИГНАЛОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ - АКТИВНЫЙ КВАНТОВЫЙ ФИЛЬТР | 1997 |
|
RU2133533C1 |
| УСТРОЙСТВО ДЛЯ НАВЕДЕНИЯ ЛАЗЕРНОГО ИЗЛУЧЕНИЯ | 1990 |
|
RU2033629C1 |
| ЛАЗЕРНАЯ ГОЛОГРАФИЧЕСКАЯ ЛОКАЦИОННАЯ СИСТЕМА | 2022 |
|
RU2790960C1 |
| СИСТЕМА НАВЕДЕНИЯ ИЗЛУЧЕНИЯ НА ОБЪЕКТ | 1988 |
|
RU2120106C1 |
| ЛАЗЕРНОЕ УСТРОЙСТВО КОНТРОЛЯ ОКОЛОЗЕМНОГО КОСМИЧЕСКОГО ПРОСТРАНСТВА | 2012 |
|
RU2502647C1 |
Изобретение относится к области лазерной локации. Достигаемый технический результат - повышение точности наведения излучения на движущиеся объекты. Согласно предлагаемому способу после спектральной селекции сигналов определяют доплеровский сдвиг частоты, осуществляют коррекцию частоты вспомогательного лазерного излучения на величину имеющегося доплеровского сдвига частоты и подсвечивают объект вторым импульсом вспомогательного лазерного излучения со смещенной частотой, а формирование лазерного излучения осуществляют с временной задержкой, меньшей времени замороженности атмосферы относительно момента времени приема второго импульса, отраженного от объекта излучения. Предложенное устройство, реализуя указанный способ, позволяет реализовать указанный технический результат. 2 с. и 1 з.п. ф-лы, 1 ил.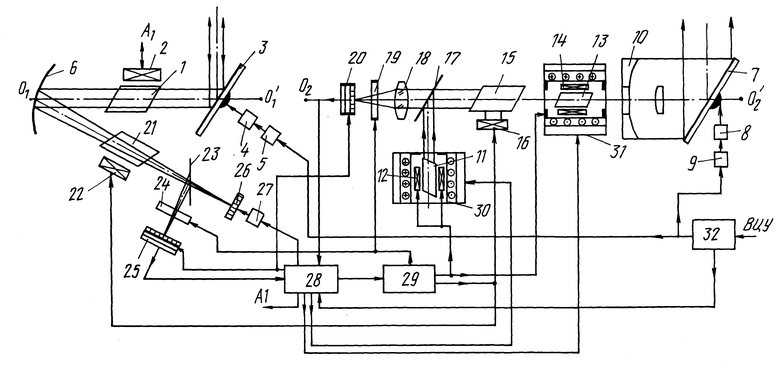
3. Устройство для осуществления способа наведения излучения на движущийся объект, содержащее установленные на первой оптической оси источник рабочего лазерного излучения с блоком накачки, первое поворотное зеркало с приводом зеркала и блоком управления приводом зеркала, расположенные на второй оптической оси первую фотоприемную матрицу, первый световой затвор, объектив, первое светоделительное зеркало, лазерный усилитель с блоком накачки, телескопическую систему, а также задающий лазерный генератор с блоком накачки, матричный световой модулятор селектора угловых мод с блоком управления, блок обработки информации и формирователь временных интервалов, отличающееся тем, что введены первый и второй активные квантовые фильтры с блоками накачки, второй световой затвор, вторая фотоприемная матрица, отражательное вогнутое зеркало, второе светоделительное зеркало, блок смещения частоты задающего лазерного генератора, блок смещения частоты лазерного усилителя, второе поворотное зеркало с приводом зеркала и блоком управления приводом, расположенное на второй оптической оси, первый активный квантовый фильтр размещен между первым светоделительным зеркалом и лазерным усилителем, оптический вход источника рабочего лазерного излучения посредством отражательного вогнутого зеркала связан с оптическим входом второго активного квантового фильтра, оптический выход которого через второе светоделительное зеркало связан с матричным световым модулятором селектора угловых мод, а через второй световой затвор - с фоточувствительной площадкой второй фотоприемной матрицы, выход задающего лазерного генератора через первое светоделительное зеркало связан с оптическим входом лазерного усилителя, оптический вход телескопической системы оптически сопряжен с установленным на второй оптической оси вторым поворотным зеркалом, при этом блоки смещения частоты задающего лазерного генератора и лазерного усилителя подключены к блоку обработки информации, управляющие входы блоков накачки лазерного задающего генератора и лазерного усилителя, первого и второго активных квантовых фильтров, первого и второго световых затворов попарно подключены к соответствующим выходам формирователя временных интервалов, выходы первой и второй фотоприемных матриц подключены к блоку обработки информации, выходы которого подсоединены к блоку накачки источника рабочего лазерного излучения и к блоку управления матричным световым модулятором селектора угловых мод, блоки управления приводами первого и второго поворотных зеркал подсоединены к источнику внешнего целеуказания, выход которого подсоединен к блоку обработки информации, причем блок смещения частоты задающего лазерного генератора и блок смещения частоты лазерного усилителя выполнены в виде снабженных источниками тока соленоидов, внутри которых расположены соответственно задающий лазерный генератор и лазерный усилитель.
| ПРИЕМОПЕРЕДАЮЩЕЕ УСТРОЙСТВО ЛАЗЕРНОГО ЛОКАТОРА | 1986 |
|
RU2048686C1 |
| US 3383686 А, 14.05.68 | |||
| US 3750171 А, 31.07.73 | |||
| СПОСОБ ИЗМЕНЕНИЯ СВОЙСТВ МАТЕРИАЛОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ - ГЕНЕРАТОР "ЭМИТОП" | 1996 |
|
RU2102233C1 |
| СПОСОБ ИСПЫТАНИЙ ЦИРКОНИЕВЫХ СПЛАВОВ В ПАРОВОДЯНОЙ СРЕДЕ | 2014 |
|
RU2550347C1 |
