Изобретение относится к области радиотехники и может найти применение в адаптивных системах радиосвязи для передачи данных о местоположении в трехмерном пространстве источника радиоизлучения (ИРИ), размещенного на летательном аппарате (ЛА) (самолет, вертолет и т.п.), за счет приема и последующей обработки электромагнитных волн, порожденных этим ИРИ.
Изобретение используется для решения технической задачи, состоящей в передаче данных декаметрового диапазона радиоволн (ДКМВ) по определению координат летательного аппарата в целях наблюдения за ним и контроля его движения наземными службами, а также в целях его навигационного сопровождения. Технический результат достигается введением адаптации обработки сигнала к изменениям помеховой обстановки, уменьшением потерь информации при приеме и повышением помехозащищенности рассматриваемой радиолинии.
Адаптивная радиолиния передачи данных декаметрового диапазона радиоволн предназначена для передачи информации, используя принцип пространственно-временного способа формирования направления связи с автоматическим выбором оптимального направления на источник сигнала, который представляет собой сложную сигнально-кодовую конструкцию.
Известно большое количество изобретений, использующих для передачи информации псевдослучайную перестройку радиочастоты (ППРЧ).
Известен способ передачи информации для использования в системах связи, функционирующих в условиях неопределенных помех, описанный в [1], в котором повышение помехоустойчивости радиолинии в условиях воздействия нестационарных помех достигается при наличии долговременного неоднородного качества отдельных частотных каналов.
Известен также способ передачи информации по патенту [2], в котором рассматривается способ ППРЧ, предусматривающий использование псевдослучайных последовательностей, для того чтобы изменять значение рабочей частоты, формируемой по псевдослучайному закону, в псевдослучайные моменты времени, гарантированно синхронные для обеих сторон радиолинии.
Недостатком вышеупомянутых способов является отсутствие адаптации сигнала к изменениям помеховой обстановки и повышенная энергетика радиолиний.
Бортовые радиотехнические средства ЛА при выполнении задач создают активные электромагнитные поля искусственного происхождения в диапазоне частот от 1 МГц до 40 ГГц. Кроме активных полей ЛА создают собственные электромагнитные излучения. Данный спектр излучения может быть использован для решения задачи обнаружения, пеленгации и определения координат ЛА.
При построении многопозиционного пассивного радара используется разностно-дальномерный метод, основанный на измерении разности хода сигнала от цели до приемных антенн радара. Этот метод позволяет работать с импульсными и непрерывными сигналами, в том числе с шумовыми и шумоподобными.
Принципиальные особенности метода заключаются в синхронном способе приема сигналов от излучающего источника на разнесенных фазированных антенных решетках (ФАР). Высокая точность определения координат ЛА обеспечивается за счет корреляционной обработки сигналов, при которой вид принятого сигнала не имеет значения. Определение координат источника осуществляется по разности прихода сигналов на каждую из ФАР, а сама разность прихода сигнала к одной позиции относительно другой определяется из положения максимума взаимно-корреляционной функции сигналов от этих позиций.
Наиболее близким техническим решением, отвечающим требованиям пассивного обнаружения и пеленгации, является устройство, описанное в статье «Одноэтапное оценивание местоположения источника радиоизлучения пассивной системой, состоящей из узкобазовых подсистем» (ж. Радиотехника и электроника, том 49, №2, 2004 г., стр. 156-170) - прототип.
Данная система содержит N приемных антенн, первый и второй аналого-цифровой преобразователь (АЦП), вычислитель.
Цель изобретения - построение адаптивной радиолинии передачи данных с использованием способа пространственно-временного формирования направления связи с автоматическим выбором оптимального направления на источник сигнала.
Результат достигается централизованной обработкой сигналов, полученных в результате приема электромагнитных колебаний в точках, размещение которых в пространстве определяется оптимальной группировкой слабонаправленных антенных элементов внутри структурных блоков, реализованных отдельными техническими средствами распределенной радиолинии.
Поставленная цель достигается тем, что в систему, содержащую N приемных фазированных антенных решеток (ФАР), первый и второй аналого-цифровой преобразователь (АЦП), вычислитель дополнительно введены малошумящий усилитель (МШУ), N входов которого соединены с N приемными ФАР, первый и второй многоканальные синхронные квадратурные приемники (МСКП), входы которых соединены соответственно с первым и вторым выходами малошумящего усилителя, а выходы - с первыми входами первого и второго аналого-цифровых преобразователей, первый и второй каналы обработки информации, первые входы которых соединены с выходами аналого-цифровых преобразователей, а выходы подключены к вычислителю; управляющий контроллер, подключенный по входу к вычислителю, первый выход которого подключен ко второму входу первого многоканального синхронного квадратурного приемника, ко второму входу первого аналого-цифрового преобразователя и ко второму входу первого канала обработки информации, а второй выход - ко второму входу второго многоканального синхронного квадратурного приемника, ко второму входу второго аналого-цифрового преобразователя и ко второму входу второго канала обработки информации; диаграммообразующее устройство (ДОУ), N входов которого соединены с N приемными ФАР; блок радиомодемов, первый вход которого соединен с выходом диаграммообразующего устройства; волоконно-оптическая линия связи, входы которой соединены с выходами блока радиомодемов; устройство формирования выходного сигнала, входы которого соединены с выходами волоконно-оптической линии связи; передающая ФАР, входы которой соединены с выходами устройства формирования выходного сигнала; локальная система передачи данных, подключенная к выходу вычислителя, ко второму входу диаграммообразующего устройства, ко второму и третьему входам блока радиомодемов; специальное программное обеспечение диспетчера связи, соединенное линией связи с локальной сетью передачи данных.
Сравнение с прототипом показывает, что заявляемая система отличается наличием новых блоков и их связями между ними. Таким образом, заявляемая система соответствует критерию «новизна».
Сравнение заявляемого решения с другими техническими решениями показывает, что перечисленные элементы, используемые в блоках, являются известными, однако их введение в указанной связи с остальными элементами приводит к расширению функциональных возможностей системы.
Это подтверждает соответствие технического решения критерию «существенные отличия».
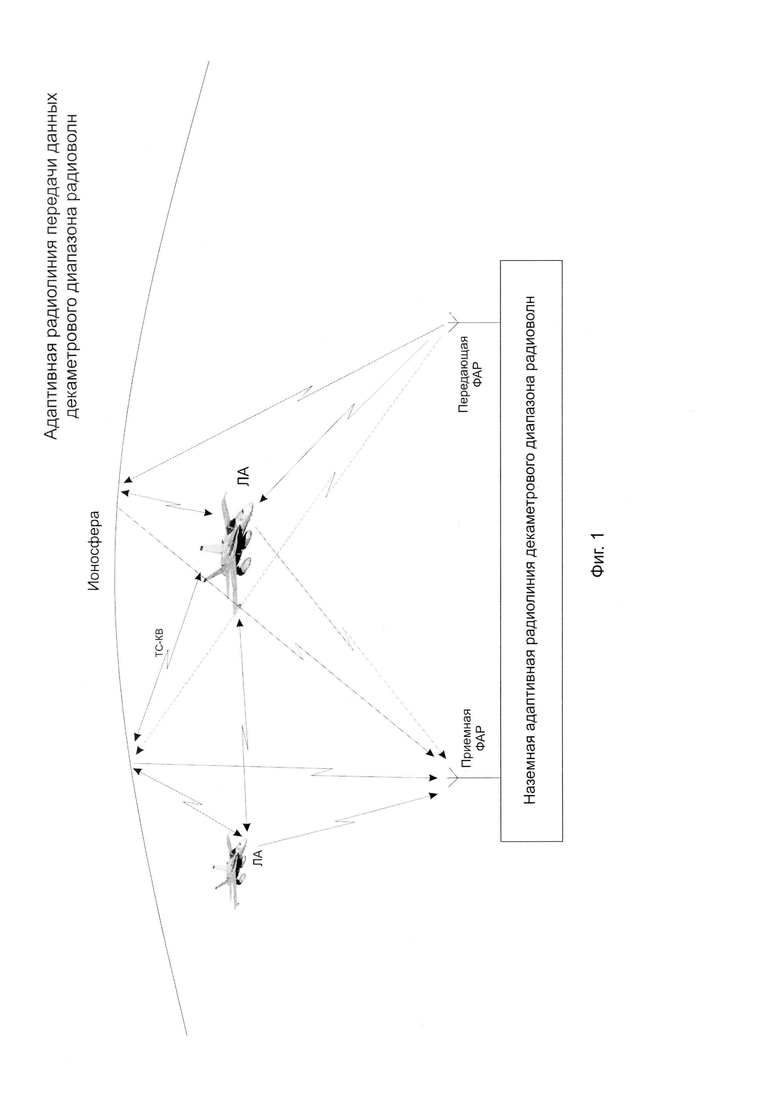
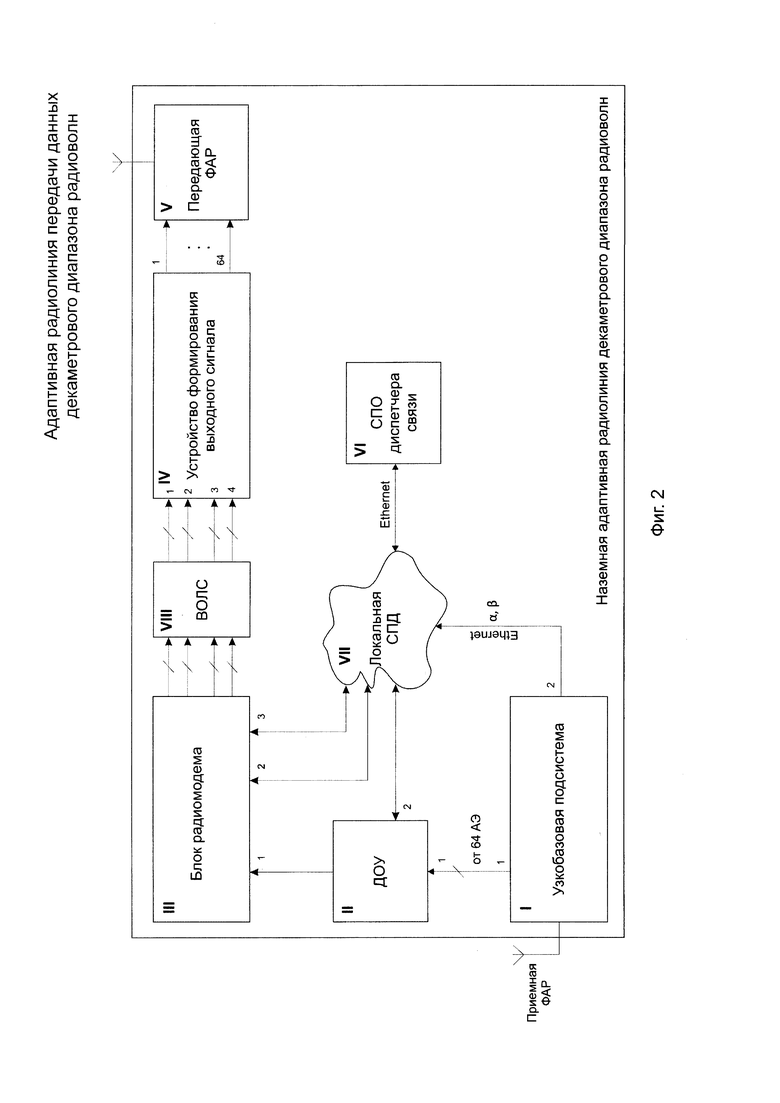
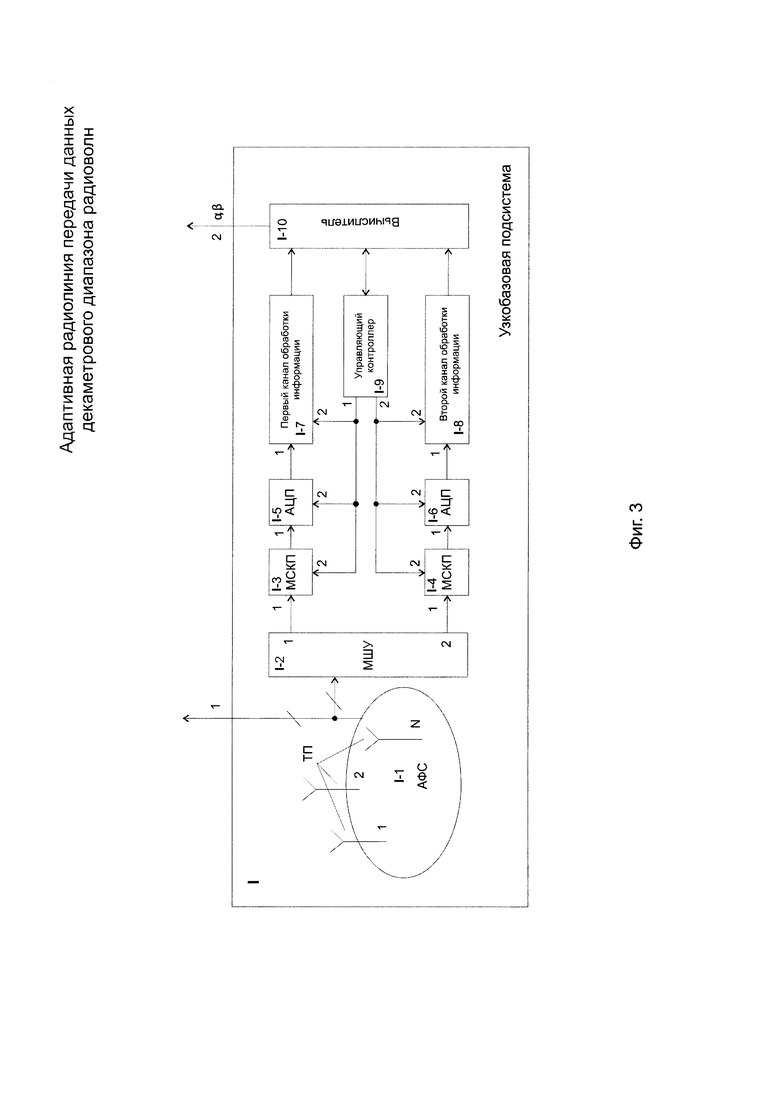
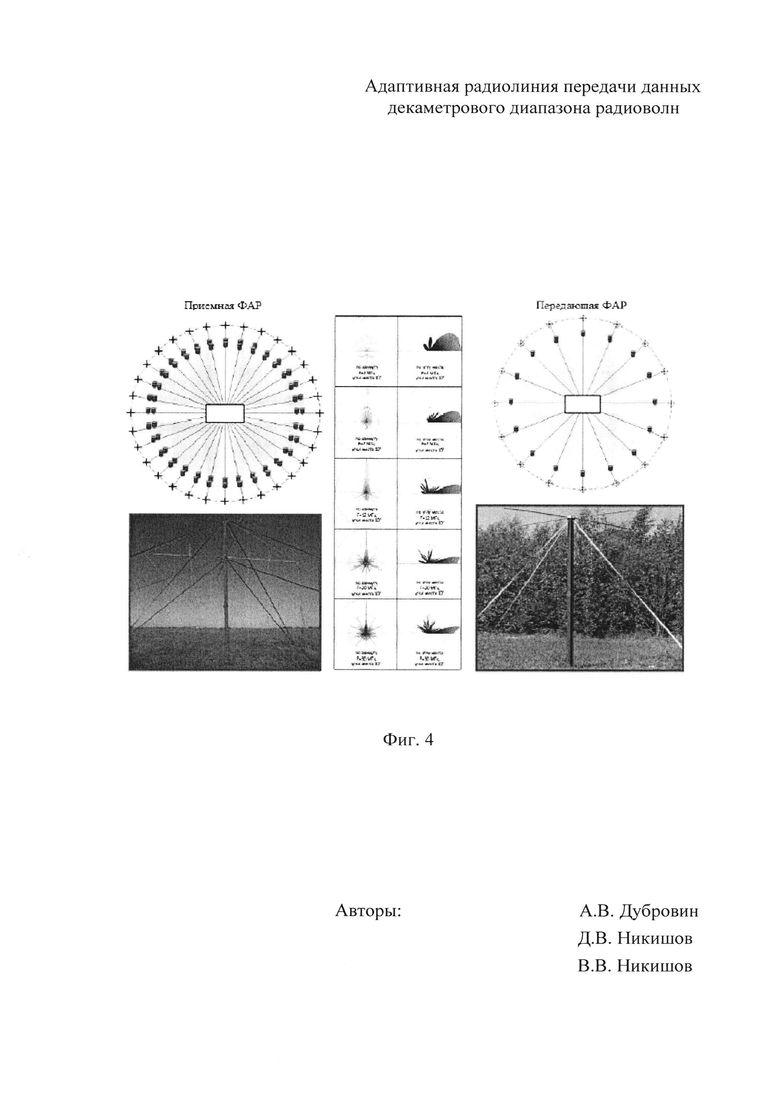
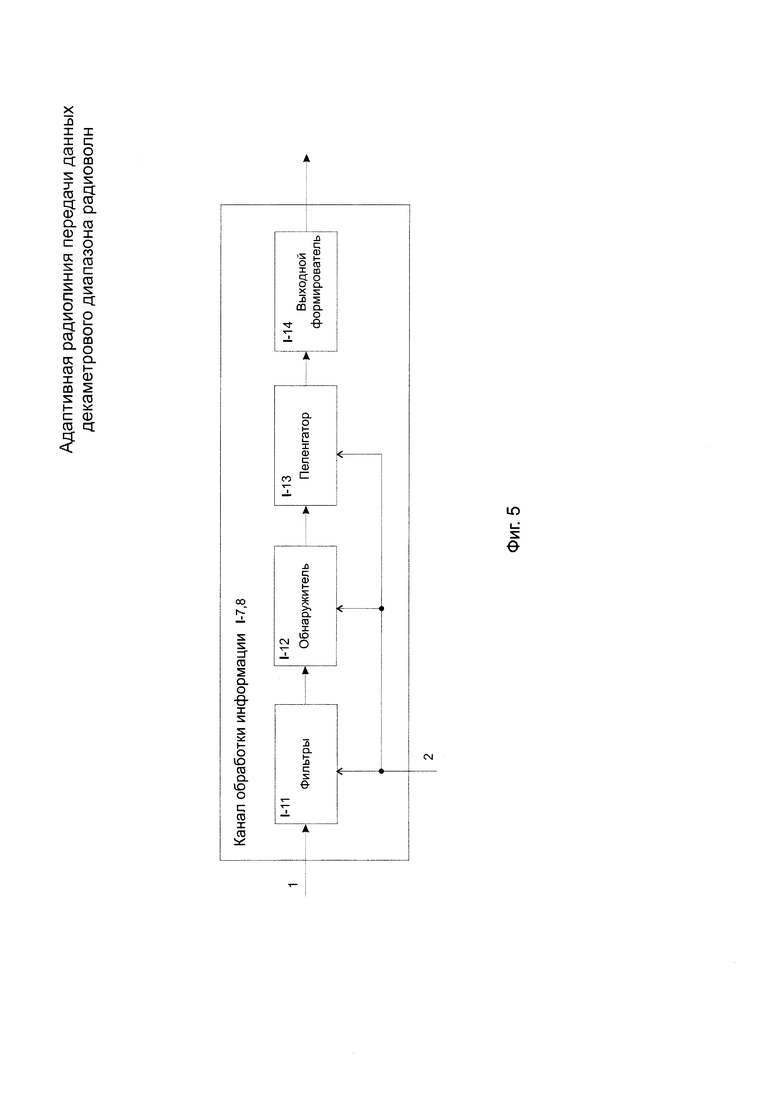
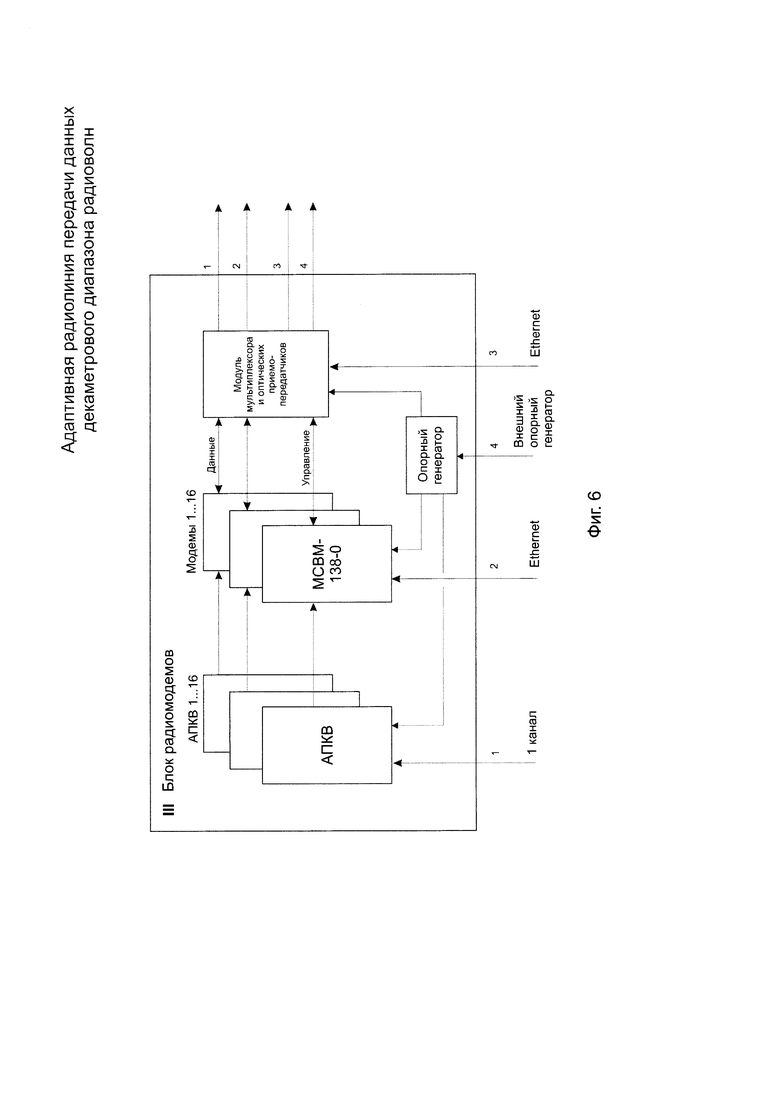
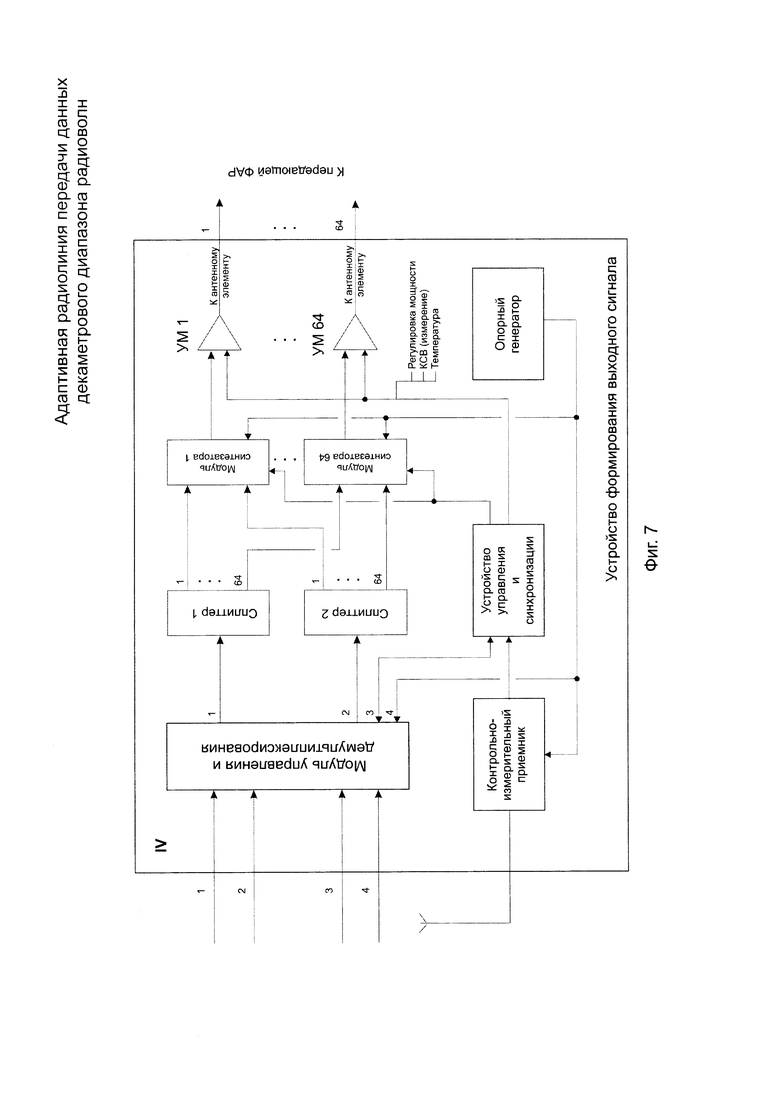
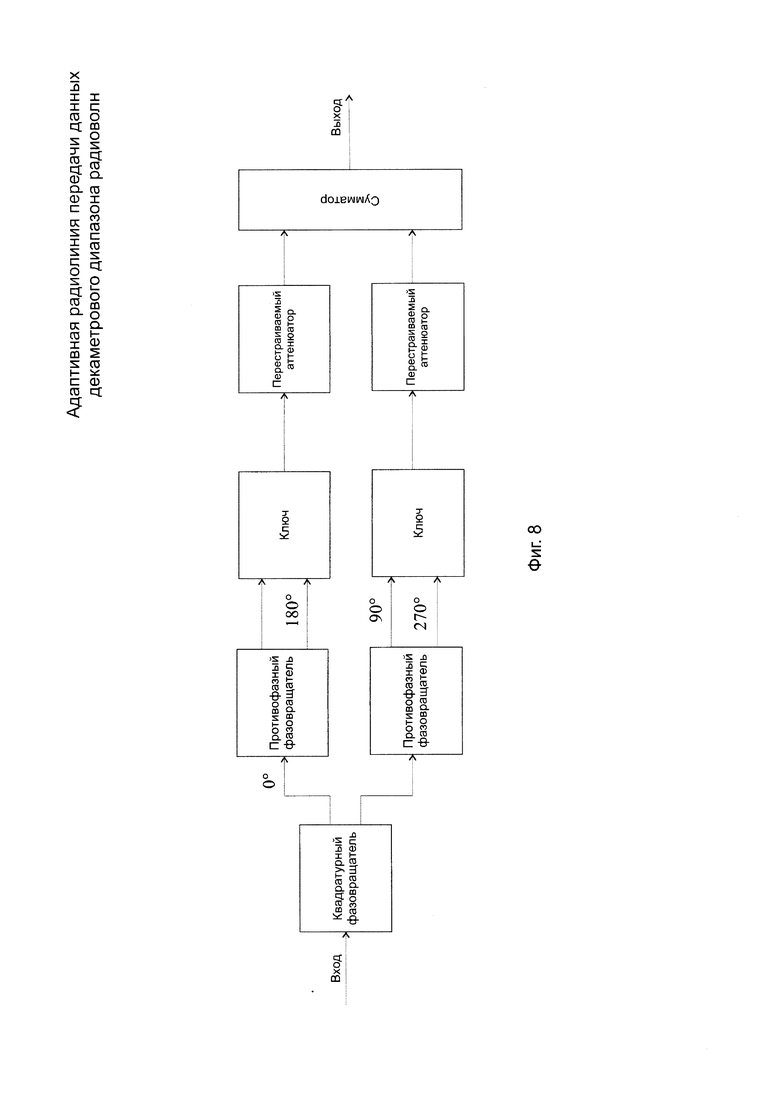
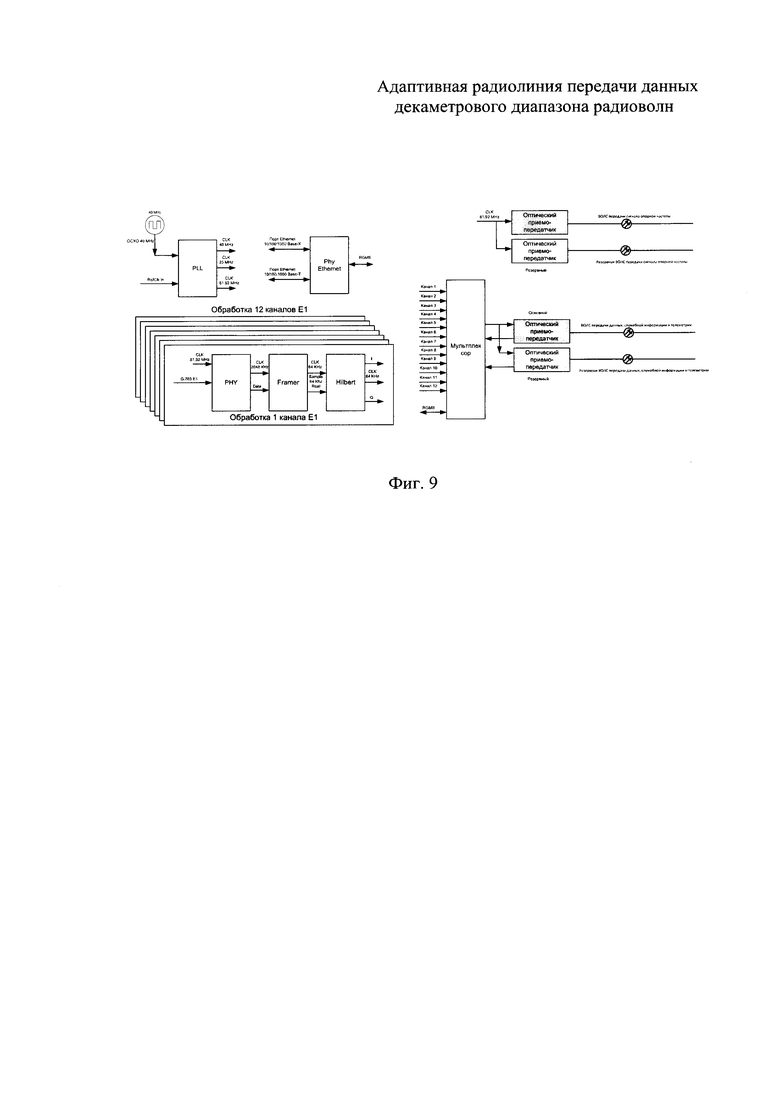
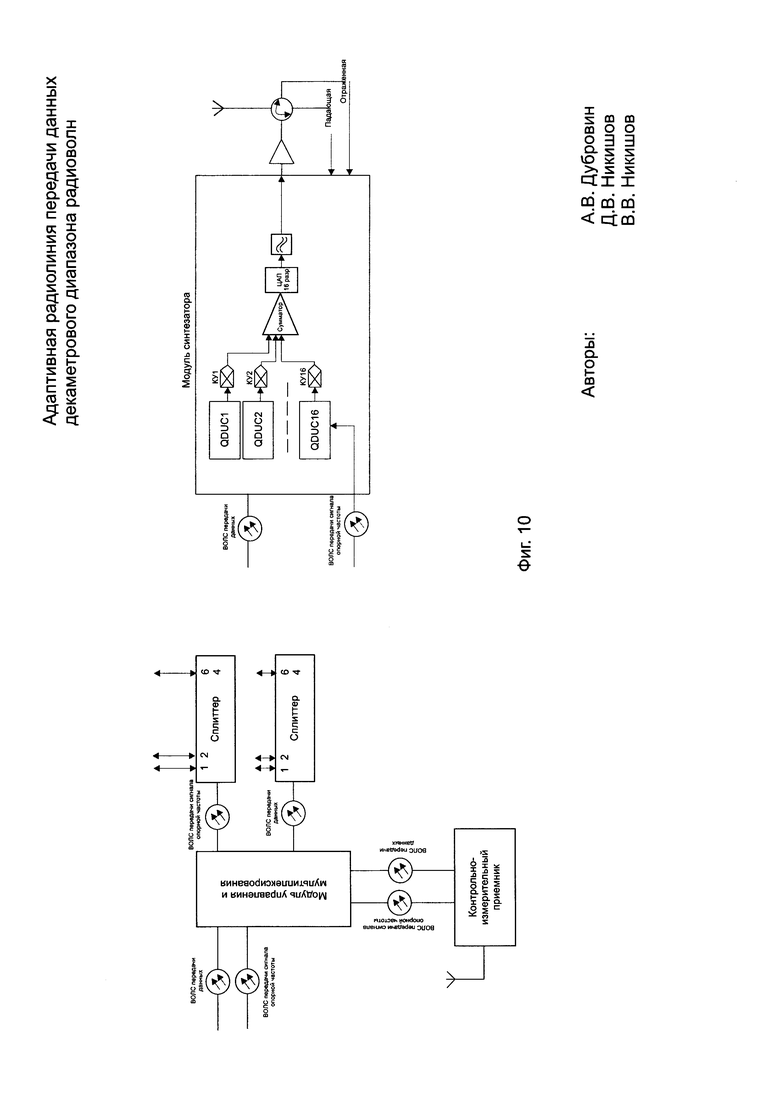
На фиг. 1 представлена общая схема предлагаемой адаптивной радиолинии декаметрового диапазона радиоволн, на фиг. 2 - структура наземной адаптивной радиолинии декаметрового диапазона радиоволн, на фиг. 3 представлена структура узкобазовой подсистемы (УП), на фиг. 4 показано устройство приемной и передающей ФАР, на фиг. 5 представлена структура канала обработки информации, на фиг. 6 представлен блок радиомодема, на фиг. 7 - структура устройства формирования выходного сигнала (УФВС), на фиг. 8 представлена структура квадратурного амплитудно-фазового модулятора, на фиг. 9 представлена структура преобразователя Гильберта, на фиг. 10 дан вариант построения 16-разрядного ЦАП.
Наземная адаптивная радиолиния декаметрового диапазона радиоволн включает (фиг. 2):
- узкобазовую подсистемы (УП) I (фиг. 3) в составе: антенно-фидерная система (АФС) 1-1, малошумящий усилитель (МШУ) 1-2, многоканальный синхронный квадратурный приемник (МСКП) 1-3,4; аналого-цифровой преобразователь (АЦП) 1-5,6; управляющий контролер 1-9, вычислитель 1-10, канал обработки информации 1-7,8, включающий (фиг. 5) фильтры 1-11, обнаружитель 1-12, пеленгатор 1-13, выходной формирователь 1-14;
- диаграммообразующее устройство (ДОУ) II;
- блок радиомодемов III;
- устройство формирования выходного сигнала (УФВС) IV;
- передающую ФАР V;
- специальное программное обеспечение (СПО) диспетчера связи VI;
- локальную систему передачи данных (СПД) VII;
- волоконно-оптическую линию связи (ВОЛС) VIII.
Система работает следующим образом.
В современных условиях обеспечения эффективного управления летательными аппаратами (ЛА) важная роль отводится радиотехническим средствам декаметрового диапазона радиоволн (ДКМВ), которые могут работать в сложной помеховой обстановке и условиях распространения радиоволн на большие расстояния.
Получены практические решения в построении низкоэнергетической радиолинии передачи данных, способной противостоять узкополосным помехам и частотно-избирательным затуханиям, вызванным многолучевым характером распространения, временным рассеяниям, и устранять межсимвольную интерференцию, кроме того, обеспечивать радиосвязь с динамическими источниками сигнала и их высокой относительной радиальной скоростью.
Наземная адаптивная радиолиния передачи данных декаметрового диапазона радиоволн (фиг. 2) имеет несколько информационных каналов обмена информацией, среди которых могут быть выделенные каналы связи, резервные каналы связи УКВ и резервные каналы связи ДКМВ.
Каналы связи с летательными аппаратами (ЛА) между наземной адаптивной радиолинией передачи данных декаметрового диапазона радиоволн и ЛА на расстояниях вне прямой видимости возможно организовать только через ДКМВ радиосредства, работающие на принципе распространения радиоволн ДКМВ диапазона с отражением от ионосферы Земли (фиг. 1). Между наземной радиолинией и ЛА возможна организация канала обмена данными в дуплексном и полудуплексном режиме, при которых возможна односторонняя передача и прием данных.
На борту ЛА для организации канала передачи информации установлен Терминал Связи KB (ТС-КВ), который построен по принципу оконечного оборудования адаптивной радиолинии передачи данных в бортовом исполнении.
Адаптивная радиолиния (АР) выполняет контроль частотного диапазона или контроль назначенных частот связи ЛА при выполнении полетного задания.
Во время выхода бортовых радиосредств на передачу происходит пеленгация этого передатчика и АР определяет его угловые характеристики α, β относительно точки размещения фазированной антенной решетки (фиг. 4) пеленгационного устройства (фиг. 5) из состава АР.
Так как передатчик размещается на борту летательного аппарата, то координаты источника излучения являются и координатами этого ЛА.
Значения пеленга и угла места (α, β) привязываются к временной шкале и вместе с полученными измерениями фиксируются в формуляре цели первичной базы данных в составе специального программного обеспечения (СПО) диспетчера связи VI АР.
После формирования полного кадра контроля формуляров цели они передаются по внутренней локальной сети в специальное программное обеспечение вторичной базы данных.
Вторичная база данных предназначена для хранения информации о формулярах целей.
На основании информации из вторичных баз данных специальное программное обеспечение решает задачу определения координат всех контролируемых ЛА.
Координата дальности может определяться или уточняться расчетным методом по алгоритму расчета дальности с использованием высоты ионосферного слоя, триангуляционным способом и разностно-дальномерным методом с использованием уточняющих поправок первых двух методов.
К информации вторичной базы данных на АР имеет доступ СПО диспетчера связи VI (фиг. 2) для построения динамических траекторий перемещения ЛА в пространстве. Визуализация динамической информации может осуществляться на мониторе технологического рабочего места оператора или на специальном информационном демонстраторе.
Алгоритмы функционирования АР
Исходным состоянием оборудования АР является дежурный режим, при котором оборудование, размещенное на стационарных объектах, находится в выключенном состоянии.
Оборудование ФАР на прием и на передачу, которое вынесено из объектов управления на различное расстояние, находится под телеметрическим управлением и технической охраной специальных средств АР от несанкционированного доступа и антивандального вмешательства.
Для обеспечения постоянного контроля текущего состояния ФАР оборудование технической охраны включено в работу постоянно и размещается в зоне быстрого реагирования или физической охраны.
Перевод оборудования АР из исходного состояния (дежурный режим) в рабочее состояние выполняется после подачи питающих напряжений на оборудование.
При этом включение оборудования ФАР на передачу, которое вынесено до нескольких км от места размещения основного оборудования АР, управляется по телеметрическим каналам.
По этим каналам в СПО диспетчера связи VI (фиг. 2) поступает информация о состоянии температуры модуля усилителя мощности (УМ 1-64) (фиг. 7) и при ее отклонении от заданных величин от технической нормы выполняется включение подогрева или охлаждения устройств съема теплового потока усилителя (радиатора УМ).
После завершения цикла внутреннего самоконтроля оборудования АР и получения положительного результата выполняется инициализация режимов работы АР по сохраненным настроечным параметрам предыдущих сеансов работы АР.
При первичном включении оборудования АР происходит многофазовая полуавтоматическая настройка оборудования и настройка его в режим постоянного автоматического функционирования.
Алгоритм установления связи по служебным каналам предусматривает фазу поиска оптимальных вертикальных углов прихода радиоволны на приемную ФАР.
Для этого один из каналов АР переводится в режим передачи тестового сигнала (ТС) по известной временной диаграмме и выполняется режим вызова корреспондента на связь для проверки параметров канала связи на вызывной частоте, которая задается расчетным методом или по выданным разрешенным частотам связи.
Оборудование АР измеряет отношение сигнал/шум в настроенных каналах связи и выдает эти значения в СПО диспетчера связи, где происходит накапливание измерительной информации для принятия оптимального режима ведения связи.
Для пространственного управления виртуальным центром диаграммы направленности на прием узкополосное пеленгационное устройство 1-13 (фиг. 4) выполняет постоянный мониторинг угловых параметров источника принимаемого сигнала и вырабатывает сигналы рассогласования по азимуту и углу места, которые поступают через локальную СПД VII в СПО диспетчера связи VI.
СПО диспетчера связи VI управляет оборудованием диаграммообразования передающей стороной АР таким образом, чтобы в реальном времени были применены оптимальные значения угловых величин.
Кроме этого, СПО диспетчера связи VI выполняет настройку технического оборудования на назначенные частоты связи всех связных устройств АР и выдает на сопровождение в узкополосный пеленгатор 1-13 (фиг. 5) значения частот для контроля, сопровождения и список разрешенных и запасных частот связи с возможной их оперативной заменой в обозначенном диапазоне работы технических средств.
Схема построения цифрового обмена информацией предусматривает возможность постоянного резервирования каналов передачи данных для обеспечения бесперебойной работы АР.
Радиомодем и линейное высокочастотное оборудование канала связи управляется от СПО диспетчера связи VI.
В силу принципа построения обмена в сети каждый из 4-х радиомодемов постоянно слушает направление связи и ожидает вызывного сигнала от вызывающей стороны.
После получения вызывного сигнала радиомодем автоматически формирует цифровой канал связи в заданном направлении для передачи информации диспетчеру связи или назначенному порту приема информации в локальной вычислительной сети передачи данных.
Взаимодействие и передача данных между радиомодемом и локальной сетью осуществляется по протоколу TCP/IP в сети Ethernet.
Кроме каналов передачи цифровых данных на радиомодемах, в состав оборудования введен дополнительный канал передачи данных, который обеспечивает СПО диспетчера связи VI информацией о состоянии каналов связи и среды передачи радиосигналов на основании работы специального режима радиомодема - измерение частотных характеристик радиоканала.
Этот режим позволяет оценить состояние среды прохождения радиоволн декаметрового диапазона с оценкой амплитудно-частотной и фазочастотной характеристики канала и энергетической характеристики в виде соотношения сигнал/шум в рабочей полосе частот связи на частотах волнового расписания, выданного для функционирования радиолинии.
Для случая оперативного технического увеличения пропускной способности радиолинии в определенном направлении связи предназначен дополнительный резервный канал цифровой радиолинии связи в УКВ диапазоне, который может использоваться и для ведения связи по дополнительному радионаправлению с подобным оборудованием и структурой сигнально-кодовой конструкции служебной цифровой радиолинии.
Информационные цифровые потоки вторичной базы данных преобразовываются в выходные потоки данных визуализации процессов работы оборудования АР.
Модуль управления АР позволяет формировать цифровую траекторию отсчетов координат в виде интерактивного отображения траектории полета летательного аппарата.
При построении АР возможно присутствие мешающих сигналов на приемную ФАР в составе узкобазовой подсистемы I от передающей ФАР V (фиг. 2), что будет снижать минимальный уровень принимаемого радиосигнала в точке приема и существенно влиять на электромагнитную обстановку в районе установки передающей ФАР.
Для исключения взаимного влияния радиосредств целесообразно обеспечить разнесение приемной и передающей ФАР на оптимальное расстояние.
Величина этого расстояния существенно влияет на длину радиокабеля от места установки синтезатора рабочего сигнала и усилителя мощности под антенным элементом передающей ФАР V.
Предлагается решение для выполнения фиксированного разноса по оптическим каналам передачи цифровой информации на большие удаления, что позволит иметь свободу выбора решений и возможность использования уже имеющейся инфраструктуры оптических линий связи.
Суть решения состоит в переносе спектра рабочих сигналов блока радиомодемов III (фиг. 2, 6) на частоты оптического диапазона и его транспортировки по оптическому каналу на большие расстояния с последующим доведением упакованной информации о рабочем сигнале, амплитудой и фазой парциального канала формирования суммирования мощности излучения в заданном направлении пространства и передачи управляющих сигналов на формирователи несущей частоты с телеметрическим контролем состояния усилителя мощности. Групповое формирование сигнала на передачу выполняется в цифровом виде от 8-и синтезаторов несущей частоты связи с последующим переносом группового спектра в аналоговый вид для усиления по мощности.
Для исключения температурной и токовой зависимости переходной характеристики активных элементов усилителей мощности (УМ 1-64) (фиг. 7) в структуру формирователя введена схема контроля фазы несущего колебания для ее учета при формировании закона формирования диаграммы направленности передающей ФАР V.
Блок радиомодемов III имеет на своем выходе рабочий сигнал модулятора модема в виде цифровых отсчетов.
Передающий тракт радиолинии представляет собой цифровое устройство, выполненное на принципах цифровой обработки сигналов с последующей фильтрацией и усилением по мощности в оконечном усилителе мощности, нагруженного на комплексное сопротивление антенного излучателя.
Формирование цифровых отсчетов передаваемого сигнала происходит в модеме в полосе НЧ со следующими параметрами:
• Частота дискретизации - 64 кГц;
• Разрядность - 16 бит.
Сформированные отсчеты упаковываются в структуру кадра цифрового потока Е1 (стандарт G.704: без Мультифрэйма, без сигнализационного КИ16, без CRC4), начиная с КИ1, который следует за нулевым КИ кадровой синхронизации.
Скорость цифрового потока Е1 составляет 2048 кбит/с, включая КИО.
Полезная скорость передачи информации в потоке (без КИО) составляет: 2048-64=1984 кбит/с.
Скорость результирующего цифрового потока отсчетов передаваемого сигнала составляет: 16 бит * 64 кГц = 1024 кбит/с, для чего необходимо занять: 1024/64 = 16 канальных интервалов в структуре сигнала.
Предлагаемая схема размещения отсчетов в структуре кадра Е1 по 8 отсчетов в одном кадре в следующем порядке:

Сформированный цифровой поток передается в порт Е1 в соответствии с физическими параметрами сигнала стандарта G.703 и по кабелю типа «витая пара CAT 5» доставляется в оптический мультиплексор (фиг. 6).
В мультиплексоре происходит декодирование физического сигнала G.703, формирование битовой последовательности данных и синхронизация по кадрам Е1.
Извлеченные отсчеты поступают на преобразователь Гильберта (фиг. 9), на выходе которого формируется квадратурное представление отсчетов сигнала.
Квадратурные отсчеты передаваемого сигнала поступают на мультиплексор, где упаковываются в некоторую кадровую структуру высокоскоростного цифрового потока совместно с данными от Ethernet порта, а затем передаются в волоконно-оптический кабель на ответное устройство.
Скорость передачи информации в оптическом волокне составляет 1250 Мбит/с, включая канальное кодирование.
Таким образом, информация о сигнале и управлении выходного синтезатора передается по одному оптическому каналу.
Второй оптический канал необходим для качественной передачи сигнала опорной частоты.
Порт Ethernet предназначен для передачи служебной, управляющей информации и телеметрии усилителя мощности, а также и пакеты, содержащие отсчеты передаваемого сигнала.
На дальней стороне принятый цифровой поток обрабатывается. Из него выделяются (демультиплексируются) данные от каналов передачи отсчетов сигнала и данные канала Ethernet.
Данные от Ethernet анализируются на наличие в них управляющей информации для синтезаторов.
Управляющая информация интерпретируется в соответствующие команды и структуры.
Ethernet пакеты, не содержащие управляющей информации, направляются в выходной Ethernet порт, к которому могут быть подключены внешние устройства, или организован вынос локальной сети на удаленном объекте.
После демультиплексирования начинается формирование цифрового потока в сторону синтезаторов (фиг. 7).
Этот цифровой поток имеет фиксированную длину, кадровую структуру, строится по принципу временного разделения каналов и содержит отсчеты для каждого из каналов, а также управляющую информацию для синтезаторов в виде сформированных команд и структур.
Цифровой поток поступает на оптические приемо-передатчики, далее через многоканальный оптический разветвитель (сплиттер 1, 2) (фиг. 7) и по оптическим кабелям фиксированной длины передается в модули синтезаторов 1-64, расположенные у антенных элементов, входящих в состав передающей ФАР V (фиг. 7). Аналогично сигнал опорной частоты поступает через оптические приемопередатчики на многоканальный оптический разветвитель и по 16 оптическим кабелям передается в модули синтезаторов.
Оптический кабель включает в себя 2 или 4 оптических волокна, в зависимости от выбора. Это означает, что к синтезатору тянется не два оптических кабеля, а один, но подключается синтезатор двумя оптическими волокнами.
Синтезатор представляет собой модуль цифровой обработки сигналов, в котором формируются сигналы рабочей частоты и осуществляется квадратурный перенос спектра НЧ сигнала в несущую частоту связи.
Вычислительные мощности синтезатора позволяют одновременно сформировать до 8 рабочих частот.
Поступающие по оптическому каналу отсчеты представляют собой квадратурные составляющие сигнала с частотой дискретизации 64 кГц и разрядностью 16 бит.
Эти отсчеты формируют НЧ спектр рабочего сигнала для каждой из несущих частот связи.
Принятые отсчеты сигнала могут интерполироваться, например, с коэффициентом 1280 до частоты дискретизации 81,92 МГц.
На указанной частоте формируются квадратурные отсчеты сигналов рабочих частот (несущей) по методу прямого синтеза (DDS).
При формировании сигналов рабочих частот можно добавлять фазовый сдвиг (иными словами начальную фазу) и уровень амплитуды.
Квадратурные отсчеты НЧ сигнала перемножаются на соответствующие квадратурные составляющие сигнала рабочей частоты, а затем суммируются.
Эти операции производятся для каждой из восьми рабочих частот и соответствующих им сигналов НЧ.
Полученные на выходах сумматоров отсчеты подаются на сумматор и таким образом формируют групповой спектр, содержащий восемь радиосигналов связи.
Отсчеты результирующего сигнала поступают на 16-разрядный ЦАП, после которого аналоговый сигнал с выхода фильтруется и подается на УМ, с выхода усилителя усиленный сигнал поступает на передающую антенну.
Пример варианта построения приведен на фиг. 9.
Для контроля правильности работы усилителей мощности (УМ 1-64) (фиг. 7) в составе передающей ФАР V имеется два параметра, необходимых для контроля: уровень падающей и отраженной волны и температура теплоотвода рассеиваемой мощности.
Для контроля и оперативного реагирования за этими параметрами в состав модуля синтезатора включены два низкоскоростных АЦП, отсчеты от которых по каналу телеметрии можно транслировать в центр управления совместно с цифровых сигналов температуры.
Таким образом, в названном решении исключаются неконтролируемые процессы автоматических регулировок по обратной связи в решениях с автоограничениями мощности излучения мощных усилителей и становится возможным управляемый режим работы уровнем мощности.
Решения с ограничением мощности по обратной связи автономных усилителей под антенной могут привести к существенному неконтролируемому ограничению мощности УМ при их работе в составе ФАР, так как любое изменение реактивной мощности в районе размещения антенных элементов приведет к автоматическому снижению мощности до неконтролируемого уровня и амплитудно-фазовый раскрыв ФАР будет неконтролируемым.
В состав устройства формирования выходного сигнала IV (фиг. 7) входит контрольно-измерительный приемник (КИП) для оценки значения фазы в установленном канале передачи.
Аналоговый сигнал с выхода ЦАП проходит через аналоговые цепи коммутации и усиления, которые имеют различные постоянные среды передачи.
Постоянные среды распространения вносят некоторую величину задержки сигналов на выходе излучателя. Если величина этой задержки будет неизвестной, то начальная фаза излученного сигнала будет случайным образом изменена, что приведет к изменению заданного направления сложения энергии в пространстве.
Для исключения влияния и уточнения реального значения фазы сигнала в передающем антенном тракте антенных элементов в схему введен КИП, который позволяет с высокой точностью измерить фазу излучаемого сигнала любым каналом ФАР и передать это значение по каналам управления диспетчеру связи.
Процесс измерения имеет высокую степень точности за счет применения высокоточного опорного генератора в цепи формирования опорного сигнала и момента запуска измерителя фазы.
Момент начала процесса синтеза выходного сигнала в модуле синтезатора и начало измерений в КИП синхронизированы специальной командой от диспетчера связи и разнесены во времени работы каждого канала передачи.
Значения фазы передаются в СПО диспетчера связи VI (фиг. 2), где учитываются при вычислениях заданного направления в качестве поправок от эксплуатационных значений измеренных задержек.
Адаптивная радиолиния передачи данных декаметрового диапазона радиоволн предназначена для передачи информации, используя принцип пространственно-временного способа формирования направления связи с автоматическим выбором оптимального направления на источник сигнала, который представляет собой сложную сигнально-кодовую конструкцию.
Принцип работы
Управляющая программа СПО диспетчера связи VI инициализирует входящее в состав АР оборудование в заданное исходное состояние.
Пеленгационное устройство радиосигналов (ПУР) I-13 (фиг. 5) настраивается в режим обзора заданного частотного диапазона для поиска и обнаружения сигнала частоты связи и вычисления направления прихода радиоволны по азимуту и углу места. ПУР работает на основе одноэтапного алгоритма пеленгования источника радиосигнала излучения (ИРИ), который позволяет вычислить угловые параметры ИРИ. Для обеспечения функционирования алгоритма пеленгования ПУР соединено с приемной ФАР (I-1) (фиг. 3) заданной конфигурации.
К приемной ФАР I-1 в составе узкобазовой подсистемы I (выход 1) подключено диаграммообразующее устройство (ДОУ) II (вход 1) (фиг. 2), которое обеспечивает амплитудно-фазовое сложение сигналов на выходе с заданного пространственного направления. Выходной сигнал приемной ФАР подается на блок радиомодема III для выполнения частотной селекции спектра рабочего сигнала, его усиления и обеспечения работы канала демодулятора блока радиомодема.
Закон формирования сложения в ДОУ II задается от СПО диспетчера связи VI через локальную сеть передачи данных (СПД) при обнаружении пеленгов ИРИ в ПУР I-13. Значение текущего пеленга на ИРИ передается на ДОУ II через СПД в реальном масштабе времени.
Блок радиомодемов (БРМ) III обеспечивает преобразование входной информации от СПО диспетчера связи VI в рабочий сигнал сложного вида для передачи его по каналу связи в модуляторе радиомодема и демодуляцию сложного сигнала в информационный поток, который поступает в СПД VII.
БРМ формирует сигнал в сторону устройства формирования выходного сигнала (УФВС) IV (фиг. 2).
Узкополосная подсистема (УП) I (фиг. 3)
Источник радиоизлучения (ИРИ), находящийся на ЛА, порождает электромагнитный сигнал, для описания которого используется модель гауссовского радиосигнала:

где K - число учитываемых составляющих,
f0 - несущая частота,
fk - частоты учитываемых составляющих в спектре комплексной огибающей,
ak и bk - коэффициенты, являющиеся гауссовскими взаимно-независимыми случайными величинами.
Такой сигнал соответствует случаю стохастической модели, применение которой обеспечивает работу системы в условиях наименьшей доступной априорной информации.
Узкобазовая подсистема I представляет собой технически единую приемную станцию, реализующую многоканальный прием в отдельных точках приема (ТП), размещение которых в структуре антенной системы УП I удовлетворяет двум условиям:
1. Расстояние между ТП одной и той же УП намного меньше расстояния между УП и ИРИ. Данное условие обеспечивает плоский фронт волны.
2. Расстояние между ТП одной и той же УП не превышает половины длины волны λ0 = c/f0, соответствующей несущей или центральной частоте принимаемого радиосигнала f0, а под с понимается скорость распространения сигнала от ИРИ до УП, равная скорости света.
УП I состоит из антенно-фидерной системы (АФС) I-1, блока малошумящих усилителей (МШУ) I-2, многоканального синхронного квадратурного приемника (МСКП) I-3,4, блока аналого-цифровых преобразователей (АЦП) I-5,6, первого и второго каналов обработки информации I-7,8, управляющего контроллера I-9 и вычислителя I-10, соединенного линией связи (выход 2) с локальной СПД VII (фиг. 2). Блок МШУ I-2 осуществляет предварительное усиление сигналов до его передачи на входы МСКП I-3,4. Блоки МСКП, АЦП являются программно-управляемыми, режим работы которых задается управляющими сигналами вычислителя I-10.
При приеме электромагнитные колебания превращаются в аналоговый электрический радиосигнал, который поступает на вход МШУ I-2, с выхода которого радиосигнал поступает на входы МСКП I-3,4. В результате синхронного детектирования на выходах МСКП формируется аналоговый видеосигнал, поступающий в форме пар квадратур на входы АЦП I-5,6, на выходе которых формируется цифровой сигнал в форме отсчетов.
Отличительными характеристиками МСКП являются центральная частота, перестраиваемая в широких пределах: от 20 МГц до 3 ГГц, и широкая полоса частот демодулируемого сигнала, составляющая величину до 60 МГц, что определяет сигнал как широкополосный в верхней части диапазона центральной частоты и как сверхширокополосный в его нижней части. Для достижения требуемого качества приема независимое цифровое управление усилением каждого канала осуществляется с шагом 0,5 дБ, а синхронизация каждой пары каналов квадратурного приемника должна обеспечивать фазовое различие точности квадратур не более 2 градусов по абсолютной величине. Для получения технического результата применяется многоканальный 16-разрядный многоканальный АЦП с перестраиваемой частотой дискретизации, при этом максимальная частота составляет 100 МГц, что с учетом защитных интервалов согласуется с максимальной полосой принимаемого радиосигнала.
Синхронность взятия отсчетов в различных каналах АЦП должна обеспечивать рассогласование моментов времени не более 0,05 от используемого периода дискретизации.
Вычислитель I-10 реализуется на основе высокопроизводительной многопроцессорной рабочей станции, оснащенной не менее чем двумя многоядерными универсальными процессорами класса Intel Xeon с рабочей частотой не менее 1,8 ГГц, и оперативным запоминающим устройством (ОЗУ), объемом не менее 8 ГБ. Вычислитель I-10 в структуре осуществляет функции управления работой УП (I) за счет задания функциональных режимов отдельных блоков. Кроме этого вычислитель I-10 выполняет предварительную цифровую обработку принятых сигналов, а также их компрессию перед передачей по линии связи.
Антенная система УП (I) размещается на вертикальной мачте (фиг. 4), высота которой составляет от 1,5 до 18 м. В верхней части мачты, на протяжении участка длины L, размещаются от одной до девяти кольцевых антенных подрешеток (КАПР). Минимальное расстояние между планарными КАПР составляет 0,5 м, что обуславливается технологическими особенностями крепления, а максимальное ограничено протяженностью рабочего участка мачты L.
Структурная организация распределенной приемной системы АР позволяет сформировать на приеме необходимое пространственное распределение электромагнитного поля сигнала, излученного ИРИ.
Пусть ИРИ расположен в точке пространства, координаты которой заданы вектором r=(X,Y,Z)T. Тогда сигнал, принятый m-й ТП, состоящей в структуре УП, представляет собой сумму задержанного и взвешенного полезного сигнала, и аддитивного шума:

где an - амплитуда сигнала на входах ТП УП;
 - время прохождения сигнала от ИРИ до условного фазового центра (УФЦ) УП;
- время прохождения сигнала от ИРИ до условного фазового центра (УФЦ) УП;
 - координаты УФЦ УП;
- координаты УФЦ УП;
χn - ошибка привязки сигнала по времени;
 - время прохождения сигнала от УФЦ до ТП (от ТП до УФЦ, если
- время прохождения сигнала от УФЦ до ТП (от ТП до УФЦ, если  );
);
 - координаты m-й ТП УП;
- координаты m-й ТП УП;

αn, βn - азимут и угол места луча, направленного из УП на ИРИ;
с - скорость распространения сигнала.
Отличительное условие, обеспечивающее эффективное использование данной модели, состоит в том, что время наблюдения сигнала на каждой позиции должно быть выбрано много больше времен корреляции сигнала и помехи. Цифровые отсчеты всех принятых сигналов передаются по высокоскоростным линиям связи в локальную СПД VII. Цифровые сигналы, принятые отдельными ТП, рассматриваются совместно и формируют многомерный цифровой сигнал.
Оценка координат производится с использованием комбинированного угломерного и разностно-дальномерного способа оценивания, при котором вся распределенная система рассматривается как комбинированная пассивная система (КПС), сочетающая в себе общие черты широкобазовой пассивной системы (ШбПС) и пассивной системы. В основе метода оценивания такой системы лежит способ вычисления оценки разности прихода сигналов на основе корреляционного приема по методу максимального правдоподобия, который для двух точек приема представлен в зарубежной работе [3].
Угловые координаты ЛА по азимуту и углу места относительно точки центра масс носителя определяются фазоразностным пеленгатором.
Дальность до ЛА определяется вычислительными методами по известным пеленгам и закону перемещения центра масс в относительной системе координат.
Функционально устройство состоит из пеленгатора I-13 с цифровой ФАР I-1, обнаружителя I-12 частотно-временных признаков целей (классификатора целей), выходных формирователей I-14 матриц координат целей и вычислителей I-9,10, в которых функционируют алгоритмы экстраполяции траекторий ЛА, управляющие алгоритмы устройства и сетевые алгоритмы обмена данными и управления с радиотехнического комплекса.
Пеленгатор I-13 с цифровой ФАР I-1 состоит из фиксированной антенной решетки (приемные антенны 20…18000 МГц), размещенной на пространственно разнесенной точке приема.
Каждая из антенн подключена к входу МШУ I-2, который обеспечивает согласование импедансов антенного элемента и соединительного кабеля. Каждый выход МШУ I-2 подключен к своему приемному тракту, который образован одним из каналов многоканального синхронного квадратурного приемника (МСКП) I-3,4 и аналого-цифровым преобразователем (АЦП) I-5,6. Таким образом, сформирован индивидуальный цифровой канал отсчетов сигнала с одного элемента решетки.
АЦП I-5,6 сигнала одновременно выполняет выборку сигнала по множеству каналов. Размер этого множества определяется числом элементов антенной решетки I-1. Например, в зависимости от требований точности определения координат можно выбрать 16, 26 или 32 канала. Так, для решетки из 16 элементов потенциальная точность устройства составляет около 6 угловых минут. При увеличении числа элементов точность возрастает.
Когерентная обработка сигнала выполняется в фильтрах I-11, обнаружителе I-12 и пеленгаторе I-13 канала обработки информации I-7,8 (фиг. 5).
В силу необходимости обеспечения стабильности амплитудно-частотных характеристик (АЧХ) тракта пеленгации, в нем предусмотрены меры по измерению АЧХ перед снятием отсчетов сигнала в полосе рабочих частот. Периодичность контроля АЧХ связана со стабильностью электрических параметров канала и управляется по алгоритму контроля реперных (известных источников сигнала) в процессе работы от контроллера I-9.
Пеленгатор I-13 обеспечивает определение угловых координат ЛА (источников радиоизлучения - ИРИ) по фазовому портрету пришедшего сигнала. Пеленгатором определяются углы прихода сигналов на антенную решетку с разных направлений на одной частоте и полосе частот. Число направлений задается требуемой точностью определения угловых координат. Для точности в 6 минут мгновенная матрица углов имеет размерность 3600 элементов. Время получения пеленга (квант времени решения задачи) зависит от быстродействия вычислителя I-10.
Обработка информации осуществляется в вычислителе I-10.
Предварительно заполняется матрица (азимут-угол места) по частотному диапазону, которая является неполной, без координаты дальности, которая получается расчетным способом по тригонометрическим уравнениям полета ЛА. Эта координата расчетная и она дополняет базу координат ИРИ до логического уровня.
Динамика работы
Многоканальный синхронный квадратурный приемник (МСКП) I-3,4 работает в режиме пеленгации ЛА на одной частоте с одной из имеющихся полос.
Сигналы с выхода вычислителя I-10 в цифровом виде поступают на обработку и выдаются через локальную СПД VII в СПО диспетчера связи VI (фиг. 2).
С определенным темпом перестройки МСКП I-3,4 по диапазону осуществляется наблюдение (локация) ИРИ и автоматическое определение их координат, с привязкой к моменту времени обнаружения.
Привязка по времени выполняется для разностно-дальномерного способа уточнения координат и решения специальных алгоритмов синтеза пространственно-временного разноса.
Таким образом, рассматриваемая система пассивного обнаружения источников радиоизлучения повышает точность определения координат ЛА.
Приемная ФАР I-1
Фазированная антенная решетка состоит из нескольких взаимно-когерентных антенных элементов с антенными усилителями для размещения на мачте.
Каждая мачта устанавливается на местности случайным образом на заданном расстоянии между собой.
Один антенный элемент (АЭ) имеет два идентичных горизонтальных вибратора, каждый из которых взаимно перпендикулярен друг к другу и ориентирован в решетке по географическому меридиану и широте.
Антенные элементы имеют укороченный вид и собственный усилитель сигналов (УС) с высоким динамическим диапазоном по напряжению. УС выполняет согласование АЭ с волновым сопротивлением питающего радиокабеля и через него подается питание от вынесенного источника напряжения.
Выход УС подключается к устройству деления сигнала (сплиттер), к которому подключаются сопряженные потребители - пеленгатор радиосигналов и диаграммобразующие устройства.
Пеленгатор радиосигналов (ПР)
Пеленгатор радиосигналов (фиг. 5) выполняет функцию обнаружения и определения направления прихода сигнала источника радиоизлучения (ИРИ). ПР работает по принципу одноэтапного измерения угловых координат ИРИ.
Для решения этой задачи в состав оборудования входят специальные устройства аналогового и цифрового преобразования радиосигнала и специальный вычислитель I-10, работающий по алгоритму одноэтапного определения угловых направлений на ИРИ. Значения угловых координат передаются в СПО диспетчера связи VI для обработки. Управление ПР выполняется от СПО диспетчера связи VI по локальной сети обмена данными. ПР задается частотный диапазон наблюдения, по которому выполняется автоматическое сканирование и поиск ИРИ с определением его угловых координат.
Диаграммообразующее устройство (ДОУ) II (фиг. 2)
Диаграммообразующее устройство выполнено на базе сосредоточенных компонентов по управлению фазовыми задержками радиосигнала при его прохождении по внутренним каналам обработки.
Принцип действия ДОУ основан на возможности раздельного управления амплитудами и фазами сигналов каждого элемента антенной системы с последующим их суммированием для создания амплитудно-фазового распределения, соответствующего заданной диаграмме направленности антенной решетки.
Основным элементом ДОУ является квадратурный амплитудно-фазовый модулятор, структурная схема которого приведена на фиг. 8.
Входной сигнал поступает на квадратурный фазовращатель, где расщепляется на две ортогональные составляющие. Каждая квадратурная составляющая при помощи двух противофазных фазовращателей 0°-180° и ключей дополнительно «доворачиваются» в нужный квадрант. Перестраиваемые аттенюаторы производят формирование амплитуд ортогональных составляющих, позволяя изменять амплитуду и фазу сигнала в пределах заданного квадранта на выходном сумматоре.
Принцип работы такого модулятора в фазовом режиме можно описать следующей формулой:

В соответствии с этой формулой, для поворота выходного сигнала на угол ϕ в синусном канале необходимо регулировать амплитуду по закону  а в косинусном канале – по закону
а в косинусном канале – по закону  В этом случае амплитуда выходного сигнала будет постоянной и равна амплитуде входного сигнала.
В этом случае амплитуда выходного сигнала будет постоянной и равна амплитуде входного сигнала.
В общем случае, при изменении как фазы, так и амплитуды выходного сигнала исходная формула преобразуется к следующему виду

В этом случае в синусном канале регулировка амплитуды производится по закону Ubx»  а в косинусном канале - по закону
а в косинусном канале - по закону 
Управление ДОУ осуществляется от СПО диспетчера связи VI. Рассчитанные коэффициенты пересылаются в ДОУ для обеспечения когерентного сложения с заданного направления на выходе ДОУ.
Блок радиомодемов (БРМ) III
БРМ III предназначен для предварительной аналоговой селекции радиосигнала, усиления и переноса спектра сигнала на промежуточные частоты с фильтрацией и его преобразования в цифровой вид с последующей цифровой обработкой сигнально-кодовой конструкции (СКК) рабочего сигнала радиомодема в демодуляторе модема.
Рабочий сигнал модулятора модема после кодирования и формирования выходной сигнально-кодовой конструкции преобразуется в цифровой вид отсчетов спектра сигнала на нулевой частоте и передается через оптический канал на устройство формирования выходного сигнала (УФВС) IV (фиг. 2).
Одновременно с цифровыми сигналами отсчетов СКК через оптический канал в сторону УФВС IV передается сигнал высокостабильной опорной частоты от опорного генератора БРМ III.
БРМ III может принимать и формировать несколько рабочих сигналов, которые преобразуются в последовательный вид для переноса на высоких скоростях в сторону УФВС IV по оптическому кабелю.
Сигналы от приемной ФАР I-1 через ДОУ II могут приниматься в БРМ III на нескольких каналах приема.
Каждый из приемных каналов состоит из активного преселектора коротких волн (АПКВ), в котором выполняется предварительная аналоговая селекции радиосигнала, его усиление, перенос спектра сигнала на промежуточные частоты с фильтрацией.
Выходной сигнал АПКВ подается на свой канал демодулятора модема МСВМ-138-0 (МСВМ-138 - Модуль Специального Вычислителя Модема - 138 (на базе процессора ОМАР - 138, dsp & arm 138 серии фирмы Ti), 0 - версия исполнения) (фиг. 6), где выполняется преобразование сигнала в цифровой вид и последующая его обработка.
От модуля МСВМ-138-0 в сторону мультиплексора формируется выходной сигнал модема в цифровой форме в виде пакетов от каждого модема.
В мультиплексоре к каждому пакету добавляется пакет информации о направлении передачи в виде расчетных значений фазы для сигнала на несущей частоте. Дополнительно в оптический канал добавляется пакет управляющих команд УФВС IV.
Устройство формирования выходного сигнала (УФВС) IV (фиг. 2, 7)
Устройство формирования выходного сигнала выполняет многоканальное и многочастотное формирование спектра рабочих сигналов на нулевой частоте и на частоте связи. Такое преобразование выполняется для пространственного сложения энергии усилителей мощности с передающих элементов ФАР V в заданном направлении.
Входной демультиплексор и узел управления УФВС IV принимает цифровой поток сигналов из оптического кабеля, разбирает пакеты и направляет их в каналы обработки, где происходит преобразование потока в отсчеты канала связи с номера радиомодема и параметров направления связи (фаза сигнала несущей, значение несущей частоты и ее амплитуда).
Каждое направление связи формирует свой поток отсчетов модулятора модема на несколько синтезаторов по числу размерности ФАР V, где у каждого синтезатора устанавливается начальная фаза несущей частоты связи в цифровом виде.
Выходной поток всех направлений связи, состоящий из отсчетов несущих частот, суммируется на входе цифроаналогового преобразователя антенного элемента (ЦАП АЭ).
Сложный сигнал с выхода ЦАП через фильтр и усилитель мощности подается на антенный элемент ФАР V.
В модуле синтезатора происходит перенос сигнально-кодовой конструкции (СКК) рабочего сигнала модулятора модема на несущую частоту, которая задается для одного из направлений связи.
Передающая ФАР V
Передающая ФАР V (фиг. 4) состоит из антенных элементов, размещенных в фиксированных точках пространства, к которым подводится радиосигнал с выходных широкополосных усилителей мощности.
Координаты установки антенного элемента выбираются исходя из требуемой зоны излучения ФАР V.
Локальная сеть передачи данных (СПД) VII
Локальная СПД обеспечивает транспорт команд управления между сопряженными устройствами для передачи по заданным направлениям связи.
Специальное программное обеспечение диспетчера связи (СПО) VI СПО диспетчера связи VI состоит из подмножества управляющих и обрабатывающих программ целевого назначения радиолинии.
Таким образом, рассматриваемая адаптивная радиолиния передачи данных декаметрового диапазона радиоволн обеспечивает скрытое ее функционирование за счет принципа пространственно-временного формирования направления связи с автоматическим выбором оптимального направления на источник сигнала с формированием цифровой траектории отсчетов координат траектории полета летательного аппарата за счет пассивного обнаружения источников радиоизлучения ЛА.
Источники информации
1. Патент РФ на изобретение №2185029 "Радиолиния с псевдослучайной перестройкой рабочей частоты", Одоевский С.М., Ерышов В.Г., 2001 год.
2. Заявка РФ на изобретение №2001102653 "Способ и устройство псевдослучайной перестройки рабочей частоты", Постников В.А., Шубенкин В.В., 2001 год.
3. Knapp С.Н., Carter G.C. The Generalized Correlation Method for Estimation of Time Delay // IEEE Transactions on Acoustic, Speech and Signal Processing, 1976, vol. 24, no. 4, p. 320-327.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА АВТОМАТИЧЕСКОГО НЕЗАВИСИМОГО ВОЗДУШНОГО НАБЛЮДЕНИЯ В ДАЛЬНЕЙ ЗОНЕ НАВИГАЦИИ | 2017 |
|
RU2663182C1 |
| СИСТЕМА ДЕКАМЕТРОВОЙ СВЯЗИ ЧЕРЕЗ ИОНОСФЕРУ | 2017 |
|
RU2680312C1 |
| СИСТЕМА ОБНАРУЖЕНИЯ ПОДВОДНЫХ И НАДВОДНЫХ ОБЪЕКТОВ | 2017 |
|
RU2670176C1 |
| Система пассивной локации для определения координат летательного аппарата в ближней зоне аэродрома и на этапе захода на посадку с резервным каналом определения дальности | 2016 |
|
RU2633380C1 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА С ИСПОЛЬЗОВАНИЕМ ВЫСОКОТОЧНОГО ОДНОЭТАПНОГО ПЕЛЕНГАТОРА И АДРЕСНО-ОТВЕТНОЙ ПАКЕТНОЙ ЦИФРОВОЙ РАДИОЛИНИИ В ДКМВ ДИАПАЗОНЕ | 2016 |
|
RU2613369C1 |
| ОДНОЭТАПНЫЙ МЕТОД ПЕЛЕНГОВАНИЯ ИСТОЧНИКОВ ИЗЛУЧЕНИЯ В ДКМВ ДИАПАЗОНЕ С ПРИМЕНЕНИЕМ ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЕТКИ, СОСТОЯЩЕЙ ИЗ ВЗАИМНО ОРТОГОНАЛЬНЫХ СИММЕТРИЧНЫХ ГОРИЗОНТАЛЬНЫХ ВИБРАТОРОВ | 2016 |
|
RU2614035C1 |
| МНОГОПОЗИЦИОННЫЙ ПАССИВНЫЙ РАДИОЛОКАЦИОННЫЙ КОМПЛЕКС, РЕАЛИЗУЮЩИЙ КОМБИНИРОВАННЫЙ ОДНОЭТАПНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА НА ЭТАПЕ ЗАХОДА НА ПОСАДКУ | 2015 |
|
RU2632922C2 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2018 |
|
RU2688199C1 |
| СИСТЕМА РАДИОСВЯЗИ С ВОЗДУШНЫМИ ОБЪЕКТАМИ | 2017 |
|
RU2642490C1 |
| РАДИОМОДЕМ | 2024 |
|
RU2830959C1 |
Изобретение относится к области радиотехники. Технический результат заключается в обеспечении передачи данных декаметрового диапазона радиоволн. Технический результат достигается за счет адаптивной радиолинии передачи данных декаметрового диапазона радиоволн, содержащей N приемных фазированных антенных решеток (ФАР), первый и второй аналого-цифровой преобразователь, вычислитель, малошумящий усилитель, первый и второй многоканальные синхронные квадратурные приемники, первый и второй каналы обработки информации, управляющий контроллер, диаграммообразующее устройство, блок радиомодемов, волоконно-оптическую линию связи, устройство формирования выходного сигнала, передающую ФАР, локальную систему передачи данных. 3 з.п. ф-лы, 10 ил.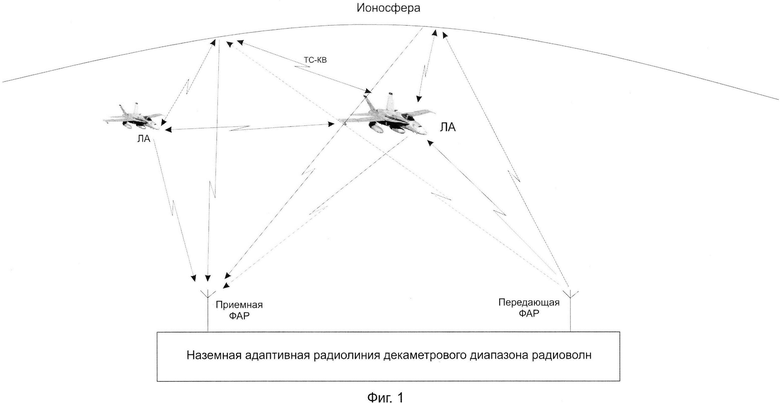
1. Адаптивная радиолиния передачи данных декаметрового диапазона радиоволн, содержащая N приемных фазированных антенных решеток (ФАР), первый и второй аналого-цифровой преобразователь, вычислитель, отличающаяся тем, что в нее дополнительно введены малошумящий усилитель, N входов которого соединены с N приемными ФАР, первый и второй многоканальные синхронные квадратурные приемники, входы которых соединены соответственно с первым и вторым выходами малошумящего усилителя, а выходы - с первыми входами первого и второго аналого-цифровых преобразователей, первый и второй каналы обработки информации, первые входы которых соединены с выходами аналого-цифровых преобразователей, а выходы подключены к вычислителю; управляющий контроллер, подключенный по входу к вычислителю, первый выход которого подключен ко второму входу первого многоканального синхронного квадратурного приемника, ко второму входу первого аналого-цифрового преобразователя и ко второму входу первого канала обработки информации, а второй выход - ко второму входу второго многоканального синхронного квадратурного приемника, ко второму входу второго аналого-цифрового преобразователя и ко второму входу второго канала обработки информации; диаграммообразующее устройство, N входов которого соединены с N приемными ФАР; блок радиомодемов, первый вход которого соединен с выходом диаграммообразующего устройства; волоконно-оптическая линия связи, входы которой соединены с выходами блока радиомодемов; устройство формирования выходного сигнала, входы которого соединены с выходами волоконнооптической линии связи; передающая ФАР, входы которой соединены с выходами устройства формирования выходного сигнала; локальная система передачи данных, подключенная к выходу вычислителя, ко второму входу диаграммообразующего устройства, ко второму и третьему входам блока радиомодемов; специальное программное обеспечение диспетчера связи, соединенное линией связи с локальной сетью передачи данных.
2. Антенная система по п. 1 состоит из активной фазированной антенной решетки, структурно реализованной в виде системы из кольцевых антенных подрешеток слабонаправленных активных элементов, концентрически размещаемых на разборной вертикальной мачте, высотой до 18 м, и отличается тем, что формирует оптимальное, в смысле критерия минимизации среднеквадратичной ошибки оцениваемых параметров, приближение равномерной диаграммы направленности в верхней полусфере за счет размещения от одной до девяти кольцевых подрешеток радиуса от 0,5 до 2 м и с числом элементов от 3 до 13 в каждой подрешетке, а также регулировки расстояния между подрешетками по высоте, с минимальным расстоянием 0,5 м, и угла поворота каждой кольцевой антенной подрешетки относительно других подрешеток.
3. Адаптивная радиолиния по п. 1, отличающаяся тем, что в качестве сети передачи данных используются линии УКВ, декаметрового диапазона радиоволн и оптоволоконной связи.
4. Адаптивная радиолиния по п. 1, отличающаяся тем, что все ее элементы выполнены с использованием цифровых технологий.
| Дозирующее приспособление для непрерывного процесса производства мипористых сепараторов | 1952 |
|
SU103046A1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2013 |
|
RU2535923C1 |
| УСТРОЙСТВО, СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ МОЩНОСТЬЮ ПЕРЕДАЧ ДЛЯ РАДИОСВЯЗИ | 2014 |
|
RU2599613C1 |
| Стационарный узел территориального радиодоступа диапазона ДКМВ | 2016 |
|
RU2619470C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕННОСТИ ТЕЧЕНИЯ ХРОНИЧЕСКОГО ПРОФЕССИОНАЛЬНОГО БРОНХИТА | 2020 |
|
RU2733866C1 |

