Предлагаемый радиолокатор относится к геофизике, в частности к устройствам геоэлектроразведки с использованием электромагнитных волн высокой частоты, и может быть использован при разведке полезных ископаемых, а также для поиска инженерных коммуникаций и других скрытых неоднородностей в исследуемом подповерхностном слое земной поверхности.
Из известных устройств наиболее близкими к предлагаемому является "Устройство для обнаружения неоднородностей в массивах горных пород" (авт. свид. N 397877, G 01 V 3/06, 1971), которое и выбрано в качестве прототипа.
В указанном устройстве для радиолокационного зондирования подповерхностного слоя Земли используется широкополосный сигнал с линейной частотной модуляцией (ЛЧМ). Однако данное устройство обладает сравнительно низкой точностью и разрешающей способностью по глубине. Это объясняется тем, что в процессе приема и соответствующей обработки отраженный ЛЧМ-сигнал "сжимается", но имеет такой существенный недостаток, как довольно высокий уровень боковых лепестков корреляционной функции, они составляют приблизительно 25% от главного лепестка. Меры по уменьшению уровня боковых лепестков приводят к существенному расширению главного лепестка и к потере энергии.
Этого можно избежать, если использовать в качестве зондирующего сигнала последовательность радиоимпульсов с малым числом периодов высокочастотных колебаний в каждом из них (вплоть до одного), т.е. последовательность радиоимпульсов без несущей частоты. Подобного типа зондирующие сигналы обладают большой шириной спектра, т.е. являются сверхширокополосными.
В зависимости от требуемой глубины и разрешения используются длины волн от метрового до дециметрового диапазона. Функция корреляции таких радиоимпульсов лишена боковых лепестков, а следовательно, точность и разрешающая способность по глубине геофизического радиолокатора могут быть существенно повышены.
Целью изобретения является повышение точности и разрешающей способности по глубине за счет исключения отражений от поверхности воздух-грунт и использования последовательности радиоимпульсов с малым числом периодов высокочастотных колебаний в каждом из них (вплоть до одного).
Поставленная цель достигается тем, что устройство, содержащее линию задержки, последовательно включенные передатчик и передающую антенну, последовательно включенные приемную антенну и приемник, снабжено двумя формирователями строба, двумя смесителями стробоскопических преобразователей, триггером, ключом, усилителем, цифроаналоговым преобразователем, аналого-цифровым преобразователем, интерфейсом, спецвычислителем, звуковым и жидкокристаллическим индикаторами, причем в качестве передатчика использован генератор ударного возбуждения, вход управления которого через интерфейс соединен с выходом спецвычислителя, а к опорному выходу последовательно подключен первый смеситель стробоскопического преобразователя, второй вход которого через первый формирователь строба соединен со вторым выходом интерфейса, и триггер, приемник состоит из последовательно подключенных к выходу приемной антенны второго смесителя стробоскопического преобразователя, второй вход которого через второй формирователь строба соединен с третьим выходом интерфейса, линии задержки, триггера, ключа, второй вход которого соединен с выходом второго смесителя, усилителя, второй вход которого соединен через цифроаналоговый преобразователь с четвертым выходом интерфейса, и аналого-цифрового преобразователя, выход которого соединен с интерфейсом, к пятому, шестому и седьмому выходам которого подключен спецвычислитель, звуковой и жидкокристаллический индикаторы соответственно.
Структурная схема геофизического радиолокатора представлена на фиг. 1.
Геофизический радиолокатор содержит спецвычислитель 1, интерфейс 2, передатчик 3, передающую антенну 4, первый смеситель 5 стробоскопического преобразователя, первый формирователь строба 6, приемную антенну 7, приемник 8, второй формирователь строба 9, второй смеситель 10 стробоскопического преобразователя, линию задержки 11, триггер 12, ключ 13, цифроаналоговый преобразователь 14, усилитель 15, звуковой индикатор 17 и жидкокристаллический индикатор 18. Причем к выходу спецвычислителя 1 последовательно подключены интерфейс 2, передатчик 3 и передающая антенна 4. К опорному выходу передатчика 3 последовательно подключены смеситель 5, второй вход которого через формирователь строба 6 соединен с вторым выходом интерфейса 2, и триггер 12. К выходу приемной антенны 7 последовательно подключены смеситель 10 стробоскопического преобразователя, второй вход которого через формирователь строба 9 соединен с третьим выходом интерфейса 2, линия задержки 11, триггер 12, ключ 13, второй выход которого соединен с выходом смесителя 10, усилитель 15, второй вход которого через цифроаналоговый преобразователь 14 соединен с четвертым выходом интерфейса 2, аналого-цифровой преобразователь 16 и интерфейс 2, к пятому, шестому и седьмому выходам которого подключены спецвычислитель 1, звуковой 17 и жидкокристаллический 18 индикаторы соответственно.
Принцип работы геофизического радиолокатора основан на методе сверхширокополосного радиолокационного зондирования, при котором оценивается изменение нестационарного электромагнитного поля, образованного отраженными от подповерхностного объекта электромагнитными волнами после его облучения зондирующим радиосигналом, в качестве которого используется последовательность радиоимпульсов с малым числом периодов высокочастотных колебаний в каждом из них (вплоть до одного). Формирование зондирующего сверхширокополосного радиосигнала осуществляется генератором 3 ударного возбуждения и передающей антенной 4.
На границе раздела грунт-объект, характеризующейся скачком относительной диэлектрической проницаемости и удельного затухания, формируется отраженный сигнал, возвращающийся к приемной антенне. Принимаемый сверхширокополосный сигнал с помощью стробоскопического приемника претерпевает масштабно-временное преобразование и переводится в цифровую форму, удобную для представления и обработки. Этот сигнал содержит информацию как о глубине расположения объекта, так и о его форме, материале и т.д. Выделение полезной информации осуществляется с помощью обработки в спецвычислителе и отображается на экране визуального индикатора в реальном масштабе времени.
Геофизический радиолокатор работает следующим образом. Основным режимом работы радиолокатора является режим "Поиск". Этот режим устанавливается автоматически при включении прибора и используется при поиске и распознавании подповерхностных объектов.
При подаче на радиолокатор напряжений питания спецвычислитель 1 инициирует установку исходных режимов всех узлов радиолокатора. По команде спецвычислителя 1 генератор 3 ударного возбуждения формирует зондирующий импульсный сверхширокополосный сигнал в виде одного периода синусоиды амплитудой 25 В и длительностью 1 нс, излучаемый передающей антенной 4 в направлении поверхности Земли.
Обнаружение объектов в режиме "Поиск" осуществляется оператором путем перемещения перед собой вправо-влево антенного блока, укрепленного на штанге, и движением вперед в заданном направлении. При этом необходимо следить за тем, чтобы антенный блок перемещался параллельно обследуемой поверхности на фиксированном расстоянии (не более 5 см от нее). Скорость перемещения антенного блока выбирается в зависимости от условий поиска и должна быть в пределах 0,1-1,0 м/с. В процессе поиска необходимо чередовать поперечные и продольные перемещения антенного блока таким образом, чтобы после каждого взмаха справа налево или слева направо антенный блок перемещался вперед на расстояние до 20 см (на величину своего линейного размера). При этом необходимо следить за тем, чтобы был обследован весь проверяемый участок местности.
Электромагнитная волна, отражающаяся от подповерхностного объекта, воздействует на приемную антенну 7. На эту же антенну воздействуют мешающие прямое излучение передатчика 3 и отраженный сигнал от границы раздела воздух-грунт. Причем большие амплитуды будут иметь сигнал прямого прохождения и сигнал, отраженный от границы раздела воздух-грунт.
Часть энергии зондирующего сигнала с опорного выхода передатчика 3 поступает на первый смеситель 5 стробоскопического преобразователя, куда также подается короткий строб-импульс с формирователя строба 6. Сформированный в смесителе 5 импульс, представляющий собой мгновенное значение зондирующего периодического сигнала, поступает на установочный вход триггера 12. Триггер 12 переводится в первое (нулевое) состояние, при котором на его выходе формируется отрицательное напряжение.
Отраженный сигнал, содержащий информацию о границе раздела сред и о подповерхностном объекте, поступает с выхода приемной антенны 7 на второй смеситель 10 стробоскопического преобразователя, куда также подается короткий строб-импульс с формирователя строба 9. Сформированный в смесителе 10 импульс, представляющий собой мгновенное значение принятого периодического сигнала, через линию задержки 11 поступает на второй вход триггера 12. Последний переводится во второе (единичное) состояние, при котором на его выходе формируется положительное напряжение. Это напряжение поступает на управляющий вход ключа 13 и открывает его. В исходном состоянии ключ 13 всегда закрыт. Линия задержки 11 необходима "для наиболее полного управления влиянием отражений от границы раздела сред на работу усилителя 15 и последующих каскадов. Линию задержки 11 можно выполнить переменной, что обеспечит устранение влияния прямого излучения передающей антенны 4 и сигналов, отраженных от границы раздела воздух-грунт и от слоев с различной глубиной залегания.
Сформированный в смесителе 10 импульс, представляющий собой мгновенное значение принятого периодического сигнала, отраженного от подповерхностного объекта, через открытый ключ 13 поступает после усиления в усилитель 15 на вход аналого-цифрового преобразователя 16, где он преобразуется в цифровую форму и поступает через интерфейс 2 в спецвычислитель 1.
Цифроаналоговый преобразователь 14 на втором входе усилителя 15 предназначен для ввода цифрового сигнала из спецвычислителя 1, управляющего величиной коэффициента усиления. Чем глубже расположен подповерхностный объект, тем больше должен усиливаться отраженный от него сигнал.
Частота формирования строб-импульсов отличается от стабильной частоты (100 кГц) генератора, вследствие чего очередной строб-импульс смещается относительно периодического принимаемого сигнала, а последовательно сформированные таким образом мгновенные значения складываются в масштабно преобразованную во времени реализацию принимаемого сигнала. После аналого-цифрового преобразования данные через плату интерфейса 2 поступают в спецвычислитель 1, а затем на экран жидкокристаллического индикатора 18. Частота вертикальной (строчной) и горизонтальной (кадровой) разверток могут варьироваться в определенных пределах. На экране индикатора 18 в реальном масштабе времени наблюдается плоская яркостная картина подповерхностных целей.
Максимальная амплитуда принимаемого сигнала сравнивается с установленным пороговым значением, при превышении которого включается звуковой индикатор 17.
Появление звукового сигнала, визуального сигнала на экране требует остановки оператора и свидетельствует о том, что в зоне обнаружения антенного блока находится объект, природу происхождения которого следует установить, а при необходимости, уточнить его местоположение и форму. Для анализа объекта следует выполнить сканирование объекта (перемещение антенного блока от границы обнаружения до границы потери) со скоростью, определяемой световой строкой на экране индикатора. Режим "Сканирование" и формирование вертикального среза грунта с объектом (режим "Срез") осуществляется переходом из режима "Поиск" нажатием кнопки "Скан". Через 20 с после обработки сигнала на экране индикатора появляется радиолокационный образ объекта, дающий представление о форме и размерах объекта. По желанию оператора контрастность изображения может меняться кнопками ">", "<" в сторону увеличения или уменьшения.
Для идентификации обнаруженного объекта с имеющимися эталонами оператору необходимо обратиться к обучаемому алгоритму, при этом на экране индикатора при идентификации обнаруженного объекта с имеющимся в памяти эталоном высвечивается соответствующее имя (например, "объект 2"). В случае несоответствия выводится сообщение "объект не опознан".
Для определения материала обнаруженного объекта оператор нажатием кнопки "<" переходит к базовому алгоритму. Нажатием кнопки "Скан" запускается базовый алгоритм. На экране выводится сообщение о типе материала: "Металл", "Композит" или "Пластик".
Нажатие кнопки "Скан" и перемещение антенного блока над объектом дает возможность произвести при необходимости повторное обследование объекта по критерию базового и обучаемого алгоритмов.
Идентификация обнаруженного объекта по обучаемому алгоритму, распознавание типа материала по базовому алгоритму, анализ оператором изображения и "среза" объекта позволяет оператору принять решение о дальнейших действиях относительно обнаруженного объекта и продолжения разведки.
Взаимодействие спецвычислителя 1 с остальными узлами радиолокатора, а также организация управления работой осуществляется через схемы интерфейса 2.
Органы управления, коммутации и индикации вынесены на общую панель управления. Различные варианты использования дисплея в режиме поиска, а также работа прибора во вспомогательных режимах, не изменяют сути описанных физических процессов, а определяются только программой работы спецвычислителя 1.
Для подтверждения работоспособности предлагаемого геофизического радиолокатора акционерным обществом "Ассоциация "Радиоавионика" разработан экспериментальный переносной геолокатор "Гео-1", внешний вид которого без поисковой штанги и блока питания представлен на фиг. 2, и оборудован лабораторный полигон. В ходе экспериментов геолокатор "Гео-1" обеспечил поиск и обнаружение находящихся в грунте или снегу металлических и неметаллических объектов, в том числе противотанковых мин типа ТМ-62 и противопехотных мин типа ПМН на глубине 100 см.
Масса геолокатора "Гео-1" в рабочем положении не более 10 кг, в транспортной упаковке - не более 20 кг. Питание прибора осуществляется от блока аккумуляторных батарей. Один блок батарей обеспечивает непрерывную работу геолокатора при t = 20oC и влажности 60% в течение 5 часов. Геолокатор "Гео-1" предназначен для работы при температуре окружающего воздуха от -10oC до +45oC. Работа с геолокатором осуществляется одними оператором. Геолокатор состоит из радиолокационного блока, конструктивно объединенного с экраном визуальной индикации, антенного блока с поисковой штангой и блока питания.
Радиолокационный блок размещен в прямоугольном металлическом корпусе с ремнем для переноски. На верхней и боковых панелях радиолокационного блока расположены органы управления и коммутации. Внутри корпуса радиолокационного блока на шасси крепится генератор зондирующих сигналов, стробоскопический приемник и четыре печатные платы:
- плата управления разверткой стробоскопического приемника (фиг. 3);
- плата управления чувствительностью стробоскопического приемника (фиг. 3),
- плата спецвычислителя;
- интерфейсная плата (фиг. 4).
В состав антенного блока входят передающая и приемная антенны. Для работы антенный блок механически соединяется с поисковой штангой. Соединение антенного и радиолокационного блоков осуществляется посредством коаксиальных кабелей, которые пропущены внутри поисковой штанги.
Блок питания геолокатора представляет собой блок аккумуляторных батарей. Корпус блока питания выполнен в виде прямоугольной коробки с крышкой. Соединение блока питания с радиолокационным блоком осуществляется с помощью кабеля питания. Для переноски блока питания используется брезентовая сумка.
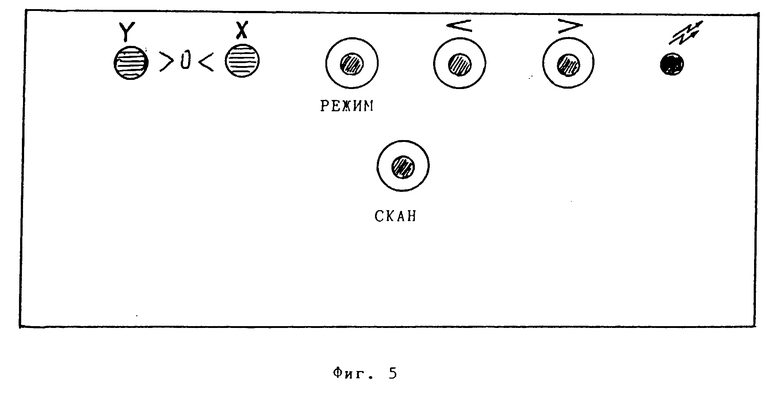
На верхней панели радиолокационного блока (фиг.5) расположены:
- ручка переменного резистора ">0<"X - для установки начальной задержки наблюдаемого сигнала во времени;
- ручка переменного резистора ">0<"Y - для регулировки положения сигнала относительно вертикальной оси экрана;
- кнопки "Режим", "Скан", ">" и "<";
- светодиод индикации наличия питающих напряжений.
Кнопки "Режим", "Скан", ">" и "<" являются многофункциональными. Их использование подробно описано в инструкции по эксплуатации.
На боковых панелях радиолокационного блока расположены: - разъем для подключения геолокатора к внешнему компьютеру (стандарт RS-232);
- выходной разъем для подключения экрана визуальной индикации;
- ручка переменного резистора "Контрастность" для регулировки контрастности изображения;
- выходной разъем для подключения блока питания;
- тумблер "Вкл" для включения и выключения питающих напряжений.
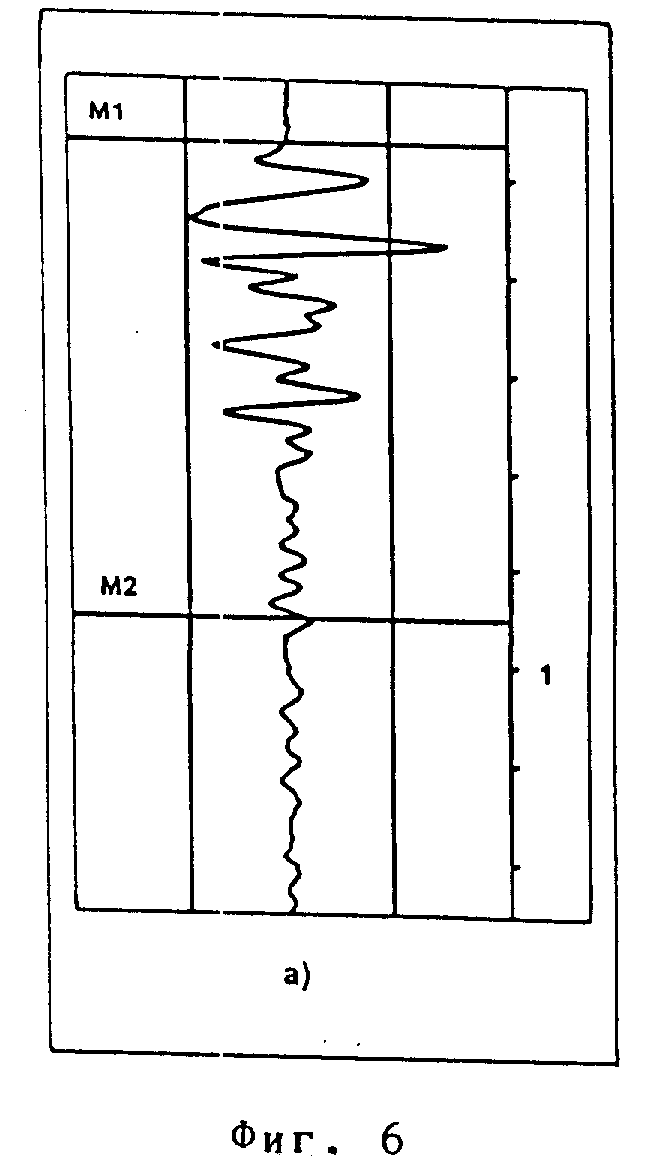
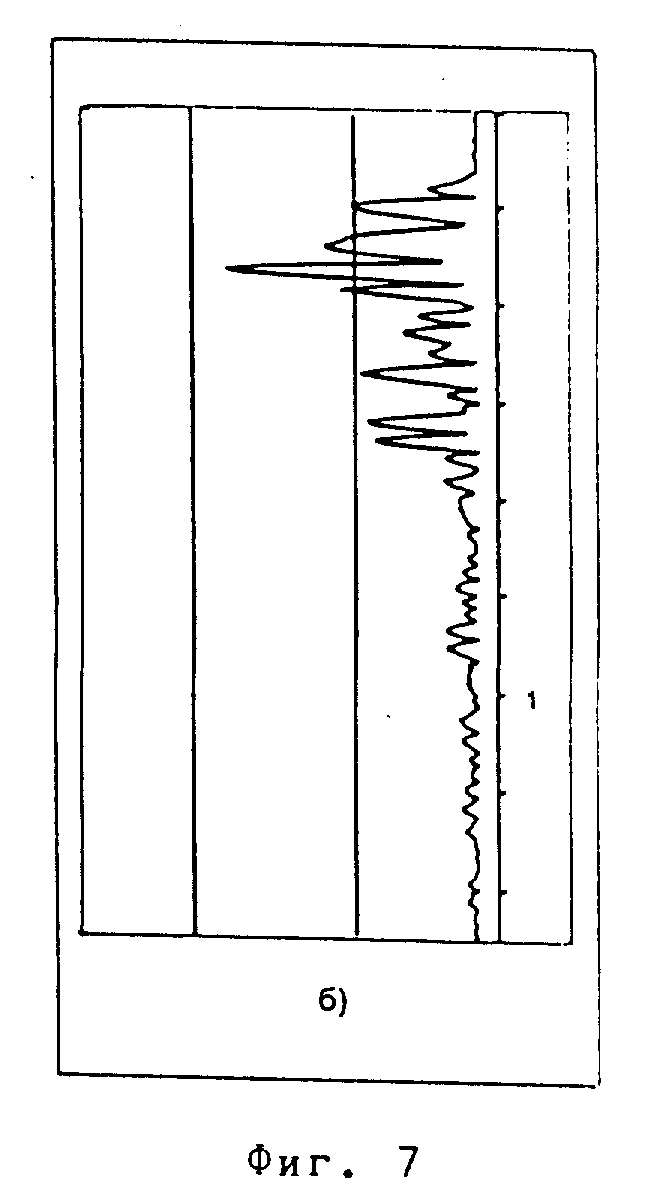
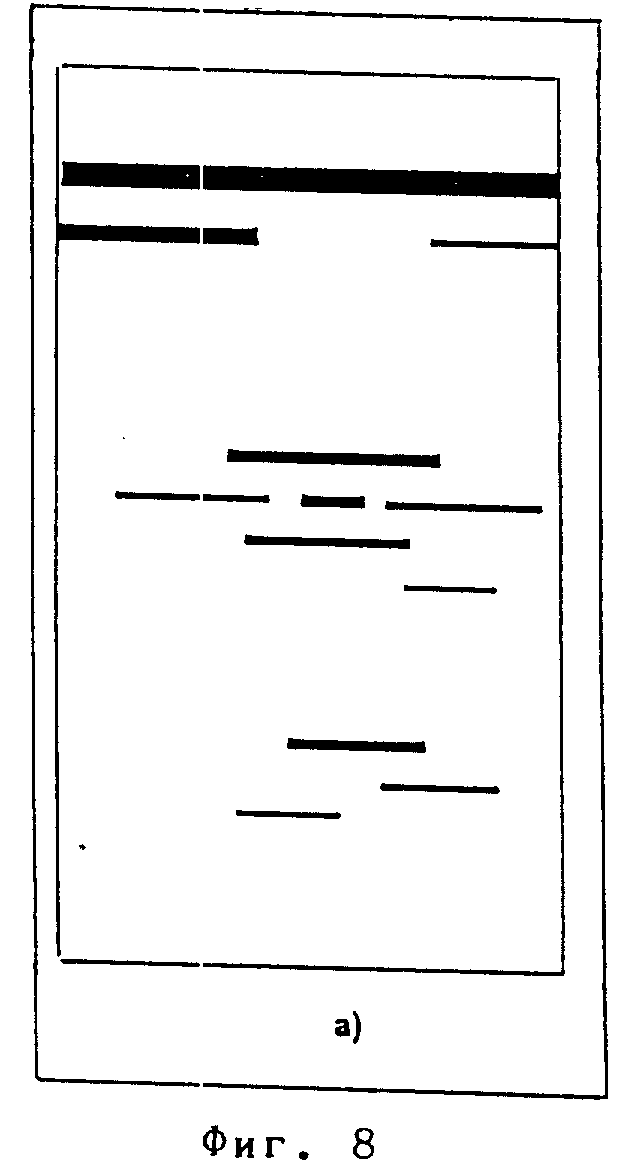
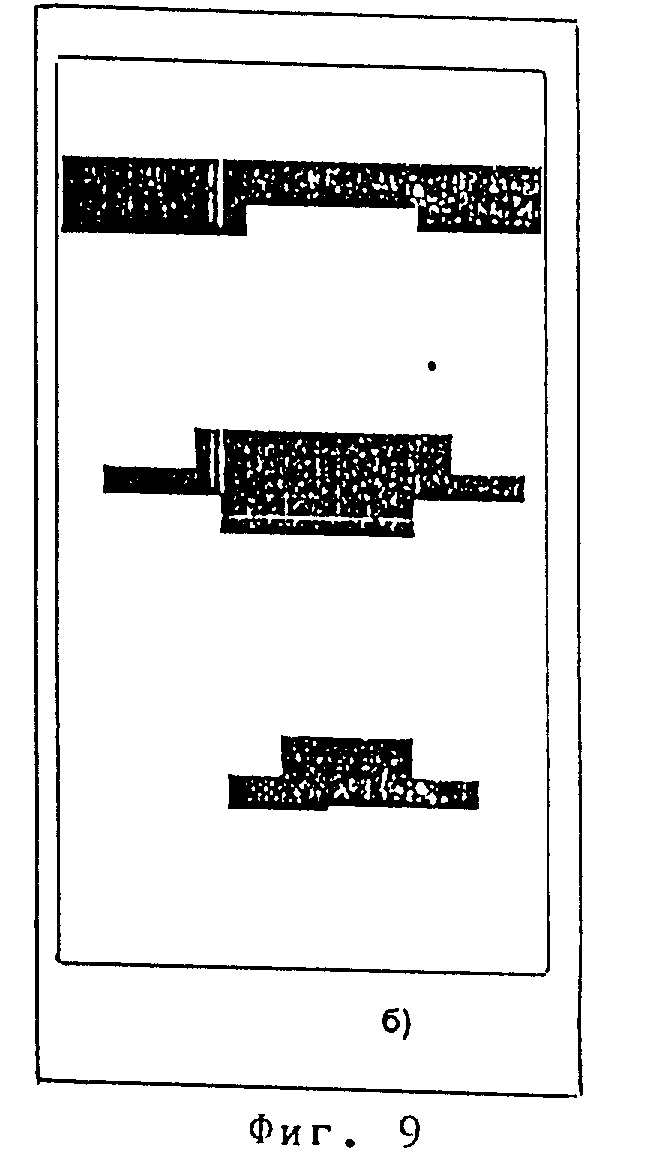
Режим "Поиск" имеет три подрежима, отличающиеся представлением информации на экране визуального индикатора. Подрежим "Рисование" - на экране наблюдается принимаемый радиолокационный сигнал, изображаемый сплошной либо пунктирной линией (фиг. 6). Вертикальные прямые линии на экране - регулируемые пороговые уровни. Горизонтальные прямые линии - временные маркеры (М1 - верхний, М2 - нижний). Подрежим "Детектор" - на экране наблюдается продетектированный сигнал (фиг. 7). Подрежим "Сканирование" - предназначен для формирования и отображения на экране яркостной картинки вертикального среза грунта. Предполагает предварительное накопление ряда последовательно приходящих реализаций сигнала в подрежиме "Рисование" (фиг. 8), либо в подрежиме "Детектирование" (фиг. 9).
После подрежима сканирования возможно выполнение операций распознавания наблюдаемых объектов:
- по базовому алгоритму - на материал (металл, пластик, композит);
- по обучаемому алгоритму - на сравнение с заранее записанными в память спецвычислителя образами.
К вспомогательным режимам работы геолокатора относятся режим: "Настройка", "Обучение", "Вывод на порт".
Режим "Настройка" предназначен для внесения изменений в начальные значения параметров среды ( ε ), прибора (коэффициент усиления, положение маркеров, усреднение и т.д.).
Режим "Обучение" предназначен для предварительного ввода в память спецвычислителя 1 эталонных радиолокационных портретов целей (не менее двух, не более пяти), по которым в режиме "Поиск" будет осуществляться их идентификация.
Режим "Вывод на порт" предназначен для вывода на внешний разъем сигналов, наблюдаемых в режиме "Поиск". При этом изображение на экране геолокатора не обновляется, в то время как выводимая информация соответствует изменяющемуся принимаемому сигналу.
Таким образом, предлагаемый геофизический радиолокатор по сравнению с прототипом и другими аналогичными техническими решениями обеспечивает повышение точности и разрешающей способности по глубине. Это достигается путем исключения отражений от границы раздела воздух-грунт и использования последовательности радиоимпульсов с малым числом периодов высокочастотных колебаний в каждом из них (вплоть до одного).
Использование сигналов малой длительности определяет ряд специфических особенностей их регистрации. Вместе с тем, периодичность следования отраженных сигналов позволяет использовать стробоскопический метод обработки сигналов. Сущность данного метода заключается в том, что осуществляется регистрация не самого исследуемого сигнала, а его отдельных выборок, каждая из которых формируется в различные периоды повторения данного сигнала.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГЕОФИЗИЧЕСКИЙ РАДИОЛОКАТОР | 2000 |
|
RU2194292C2 |
| ГЕОФИЗИЧЕСКИЙ РАДИОЛОКАТОР | 2008 |
|
RU2375729C1 |
| ГЕОФИЗИЧЕСКИЙ РАДИОЛОКАТОР | 2010 |
|
RU2447464C1 |
| ГЕОФИЗИЧЕСКИЙ РАДИОЛОКАТОР | 2003 |
|
RU2234112C1 |
| РАДИОЛОКАТОР ДЛЯ ОБНАРУЖЕНИЯ НЕОДНОРОДНОСТЕЙ В ПОДПОВЕРХНОСТНОМ СЛОЕ ЗЕМЛИ | 2002 |
|
RU2200332C1 |
| МИНОИСКАТЕЛЬ | 2010 |
|
RU2451953C1 |
| УСТРОЙСТВО ЗОНДИРОВАНИЯ СТРОИТЕЛЬНЫХ КОНСТРУКЦИЙ | 2005 |
|
RU2282875C1 |
| ГЕОФИЗИЧЕСКИЙ КОМПЛЕКС ДЛЯ ПОИСКА ПОДПОВЕРХНОСТНЫХ ОБЪЕКТОВ "ГФК-1" | 2005 |
|
RU2283519C1 |
| УСТРОЙСТВО ДИСТАНЦИОННОГО ЗОНДИРОВАНИЯ ПОДПОВЕРХНОСТНЫХ СЛОЕВ ПОЧВЫ | 1997 |
|
RU2154845C2 |
| УСТРОЙСТВО ЗОНДИРОВАНИЯ СТРОИТЕЛЬНЫХ КОНСТРУКЦИЙ | 2011 |
|
RU2460090C1 |
Использование: при разведке полезных ископаемых, а также для поиска инженерных коммуникаций и других скрытых неоднородностей в исследуемом подповерхностном слое земной поверхности. Сущность изобретения: для повышения точности и разрешающей способности по глубине за счет исключения отражений от поверхности воздух-грунт и использования последовательности радиоимпульсов с малым числом периодов высокочастотных колебаний в каждом из них геофизический радиолокатор содержит спецвычислитель 1, интерфейс 2, передатчик 3, передающую антенну 4, первый смеситель 5 стробоскопического преобразователя, первый формирователь строба 6, приемную антенну 7, приемник 8, второй формирователь строба 9, второй смеситель 10 стробоскопического преобразователя, линию задержки 11, триггер 12, ключ 13, цифроаналоговый преобразователь 14, усилитель 15, аналого-цифровой преобразователь 16, звуковой индикатор 17 и жидкокристаллический индикатор 18. 9 ил.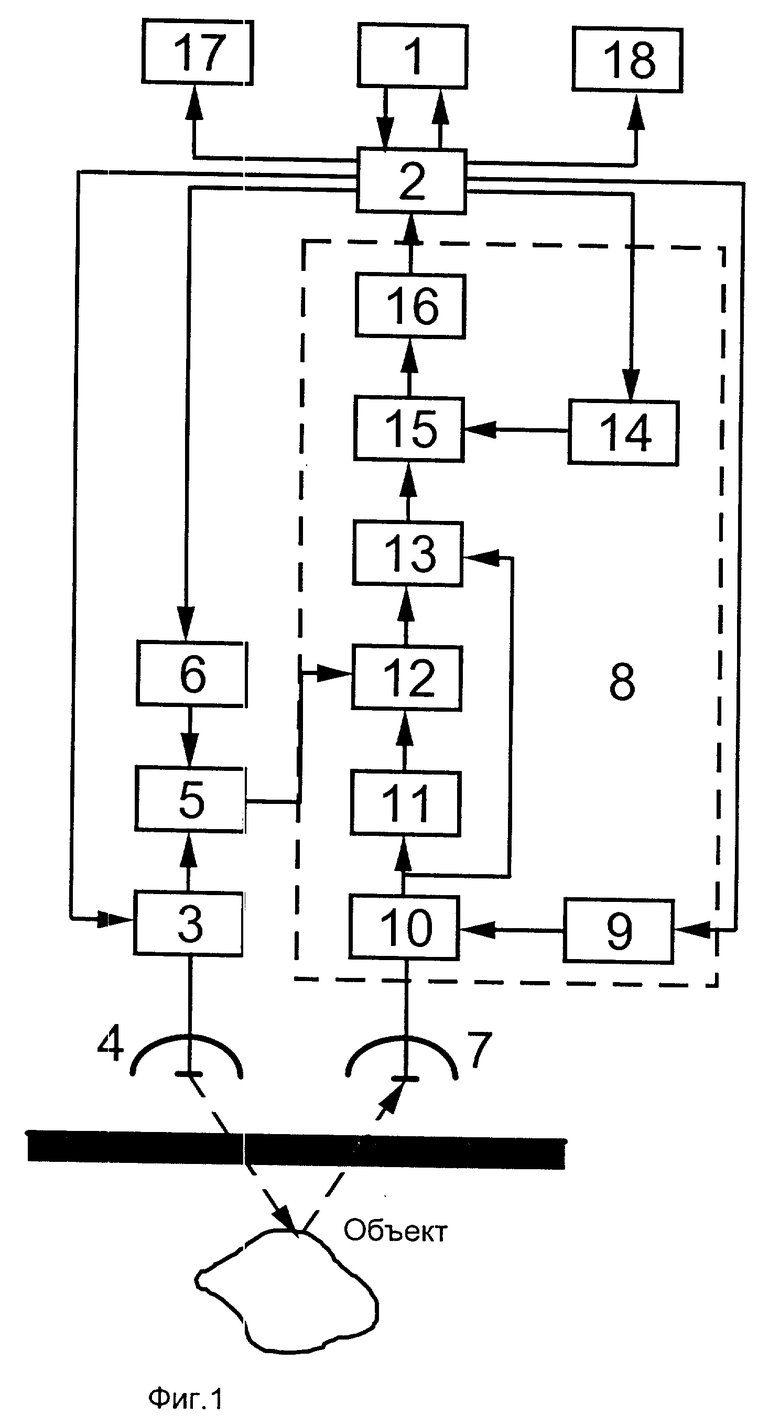
Геофизический радиолокатор, содержащий линию задержки, последовательно включенные передатчик и передающую антенну, последовательно включенные приемную антенну и приемник, отличающийся тем, что он снабжен двумя формирователями строба, двумя смесителями стробоскопических преобразователей, триггером, ключом, усилителем, цифроаналоговым преобразователем, аналого-цифровым преобразователем, интерфейсом, спецвычислителем, звуковым и жидкокристаллическим индикатором, причем в качестве передатчика использован генератор ударного возбуждения, вход управления которого через интерфейс соединен с выходом спецвычислителя, а к опорному выходу последовательно подключен первый смеситель стробоскопического преобразователя, второй вход которого через первый формирователь строба соединен с вторым выходом интерфейса, и триггер, приемник состоит из последовательно подключенных к выходу приемной антенны второго смесителя стробоскопического преобразователя, второй вход которого через второй формирователь строба соединен с третьим выходом интерфейса, линии задержки, триггера, ключа, второй вход которого соединен с выходом второго смесителя, усилителя, второй вход которого через цифроаналоговый преобразователь соединен с четвертым выходом интерфейса, и аналого-цифровой преобразователь, выход которого соединен с интерфейсом, к пятому, шестому и седьмому выходам которого подключены спецвычислитель, звуковой и жидкокристаллический индикаторы соответственно.
| SU, авторское свидетельство, 397877, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| SU, авторское свидетельство, 1078385, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
