Изобретение касается способа регулирования приводного и/или тормозного усилия тяговых электродвигателей единицы самодвижущегося подвижного состава при предельной величине силы сцепления колес с рамами. Подразумевается, что в качестве свободной (бегунковой) псевдооси при реализации способа используется интегратор.
Подобный способ уже известен из заявки ФРГ N 3407309, B 60 L 3/10, 1985. Известный способ можно усовершенствовать благодаря принятию дополнительных мер для более точного определения соответствующего момента времени окончания ввода дополнительной входной величины в интегратор (заявка ФРГ N 3837908, В 60 L 3/10, 1990) и введения возбуждающих импульсов с целью повышения скорости реагирования на замасленных или иначе загрязненных поверхностях рельсов (заявка ФРГ N 3902846, В 60 L 3/10, 1990 прототип).
Однако бывают другие рабочие состояния, реагирование на которые может быть неудовлетворительным. Это процессы с очень быстрой или мгновенной потерей силы сцепления на рельсах. Сюда среди прочего относятся набегание колесной пары с сухого участка рельса на мокрый или замасленный участок, причем максимальная сила сцепления неожиданно снижается наполовину или еще меньше, а также трогание с места или при небольшой скорости на поверхностях рельсов с очень сильным падением силы сцепления уже с небольшим скольжением (вода с песком, ржавчина). В этих случаях снижение приводного усилия характеристики Δ n протекает слишком медленно, и в результате возникает большое нежелательное проскальзывание колес, которое вновь может быть отрегулировано лишь постепенно с потерей тягового усилия.
Для электрического железнодорожного подвижного состава, который оснащен традиционными ходовыми колесами, т. е. колесами без привода и поэтому без проскальзывания, и которые в сочетании с тахогенераторами могут служить в качестве датчиков фактической скорости единицы подвижного состава над землей, уже известно техническое решение по управлению. В данном решении осуществляется снижение приводного или тормозного усилия путем оценки разности скорости вращения (европейская заявка N 0218839 В 60 L 3/10, 1987). При этом при превышении определенной величины первой производной по времени разности скорости вращения действует снижающий момент с независимой от проскальзывания (е1) и зависимой от проскальзывания (е2) составляющими и помимо этого дополнительно активизируется другое снижение (е2'), которое зависит от соответственно максимально достигнутого уровня первой производной по времени разности скорости вращения. Величина этого снижающего сигнала увеличивается до тех пор, пока не будет достигнут установленный максимум производной разности скорости вращения.
Подобный способ разработан для железнодорожного подвижного состава со свободными (бегунковыми) колесными осями и там является приемлемым. Для железнодорожного подвижного состава, который не имеет таких бегунковых колес (например, современные электровозы) и скорость которых над землей должна определяться с помощью действующих в качестве так называемых "бегунковых псевдоосей" интеграторных систем, простое использование и перенос известного способа не является достаточным и усовершенствующим.
Задача изобретения заключается в том, чтобы в этих особых случаях исключить или свести к минимуму потери силы тяги также и для работающего с бегунковой псевдоосью регулирующего устройства.
Эта задача решается тем, что в способе регулирования приводного и/или тормозного усилия тяговых электродвигателей подвижного состава без свободных осей в области граничного сцепления колес с рельсами, согласно которому по требуемой силе тяги и массе единицы подвижного состава оценивают ожидаемое ускорение или замедление вращения колесной пары, интегрируют его, определяют разность между результатом интегрирования и частотой вращения соответствующей ведущей оси, дифференцируют полученную разность по времени, в случае превышения первой производной заданного значения фиксируют переход колесной пары в зону нестабильного скольжения, при достижении первой производной предельного значения к упомянутому интегрируемому сигналу добавляют сигнал противоположного знака, уменьшают приводное или тормозное усилие до возвращения колесной пары в зону стабильного скольжения, после чего вновь увеличивают приводное или тормозное усилие, при переходе колесной пары в зону нестабильного скольжения дополнительно снижают приводное или тормозное усилие пропорционально максимальному значению превышения первой производной над пороговым значением, при этом указанное превышение запоминают и сбрасывают в момент достижения нового максимума превышения первой производной. При этом запомненное превышение первой производной над пороговым значением сбрасывают по экспоненциальному закону.
На чертеже представлена блок-схема устройства для регулирования ведущей оси тягового электродвигателя, получающего питание от инвертора.
Инвертор 1 питает тяговый электродвигатель переменного тока 2. Частота вращения оси регистрируется тахогенератором 3 или датчиком импульса вращения совместно с блоком формирования сигнала. На ввод 4 подается формируемая в системе регулирования привода заданная величина частоты проскальзывания fSsoll двигателя. На ввод 5 вместо реально измеренной скорости движения единицы подвижного состава над землей подается псевдоскорость вращения бегунковой поддерживающей оси, которая сравнивается в блоке формирования разности с измеренной скоростью вращения оси тахогенератора 3. Разность скорости вращения, полученная в блоке формирования разности 6, затем оценивается в мультипликаторе 7 с соответствующим подаваемым на ввод 8 постоянным коэффициентом или с коэффициентом, зависящим от скорости и/или тягового усилия. Полученное значение в блоке вычитания 9 вычитается из задаваемой величины частоты проскальзывания fSsoll двигателя и используется в качестве заданной величины вращающего момента. В сумматоре 10 в виде суммы скорости вращения оси frot и желательной частоты проскальзывания двигателя образуется частота инвертора как статорная частота тягового электродвигателя 2.
На ввод 11 подается задаваемая величина ожидаемого ускорения или соответственно замедления, получаемая из силы тяги или соответственно тормозного усилия и массы единицы подвижного состава. Для этого в локомотивах необходимо учитывать прицепной вес, что можно осуществить с помощью системы автоматической адаптации. Данная задаваемая величина в интеграторе 13, который выполняет функции бегунковой псевдооси, преобразуется в величину частоты вращения. Данный интегратор 13 при этом настраивается таким образом, чтобы он производил суммирование в небольшом диапазоне допуска быстрее, чем это соответствует истинной величине ускорения единицы подвижного состава, т.е. так, чтобы скорость вращения бегунковой псевдооси медленно расходилась с фактической скоростью единицы подвижного состава. Поэтому интегратор 13 получает дополнительную обратную связь через компаратор 14, переключатели 15 и 16, а также однополупериодные выпрямители 17, 18 или другие блоки, соответственно пропускающие сигналы только одной полярности, и, кроме того, суммирующее звено 12. В компараторе 14 осуществляется сравнение выходных данных интегратора, т.е. сравнение скорости вращения бегунковой псевдооси с частотой вращения действительной оси. Положительная разность (т.е. бегунковая псевдоось вращается быстрее) только при режиме работы "движение" (переключатель 15 замкнут) передается в интегратор 13 через однополупериодный выпрямитель 17 и затем производится регулирование скорости вращения бегунковой псевдооси до тех пор, пока не произойдет согласование со скоростью вращения действительной оси. При отрицательной разности (т.е. бегунковая псевдоось вращается медленнее) и в режиме эксплуатации "торможение" (переключатель 16 замкнут) она передается в интегратор 13 через однополупериодный выпрямитель 18 и затем производится процесс регулирования скорости вращения бегунковой псевдооси в сторону увеличения до полного совпадения со скоростью вращения действительной оси. Благодаря этому, пока происходит вращение действительной оси, с выхода интегратора 13 больше не происходит ускорение и замедление, как единицы подвижного состава. Величины скорости вращения согласуются и формирователь разности 6 не показывает разность по скорости вращения.
При возникновении проскальзывания колеса в режиме эксплуатации "движение" в конце концов происходит более сильное ускорение оси, чем единицы подвижного состава или интегратора. Интегратор 13 теперь не может вовлекаться с помощью обратной связи, потому что однополупериодный выпрямитель 17 не пропускает отрицательную полярность. В формирователе разности 6 появляется разность частот вращения, как между ведущей осью и истинной бегунковой осью.
При торможении полярность разности меняется на обратную, благодаря чему сигнал обратной связи проходит через переключатель 16 и однополупериодный выпрямитель 18. Возникающий на формирователе разности 6 сигнал разности скорости вращения осуществляет затем регулирование (как описано в отношении условных обозначений 1 10) вращающего момента и тем самым тягового или соответственно тормозного усилия тягового двигателя.
Теперь, например, скорость вращения бегунковой псевдооси уже достигла значения, которое не превышает скорости над землей, но соответствует скорости вращения оси, вращающейся уже по рельсовой поверхности с проскальзыванием, как это требуется при передаче максимально возможной силы тяги. При возникновении этого проскальзывания, т.е. начиная с чистого качения ведущей оси, уже едва ли возможно измерить более сильное ускорение, чем единицы подвижного состава. Интегратор 13 еще может до этого следить за скоростью вращения оси. Более сильное ускорение ведущей оси наступает только тогда, когда скольжение превышает максимальный коэффициент трения.
Без принятия дальнейших мер интегратор 13 бегунковой псевдооси продолжал бы и далее работать, причем бегунковая псевдоось постепенно по отношению к единице подвижного состава вращалась бы все быстрее. Ведущая ось также все больше проскальзывала бы и, наконец, наступило бы состояние боксования.
Для того, чтобы воспрепятствовать этому, регулирование рассчитывают таким образом, чтобы колесную пару или колесную группу путем уменьшения приводного усилия двигателя FMot или тормозного усилия при торможении в период максимума сцепления возвращать в зону устойчивого скольжения. При этом элементы 19, 20, 21 образуют блок перемены полярности, который в режиме торможения обеспечивает перемену полярности сигнала разности скорости вращения. Цифрой 22 обозначен дифференцирующий блок, который образует первую производную по времени сигнала разности скорости вращения dDn/dt. Цифрой 40 обозначен блок задержки. Первый порядок означает, что рост выходного сигнала дифференцирующего блока 22 несколько спрямлен. Выход блока задержки 40 далее через электронный переключатель 41 с размыкающим контактом связан со ступенью предельного значения 43, которая передает двоичный сигнал на элемент ИЛИ 44. Обратная связь ведет к звену выдержки времени 42, которое после достижения задержки срабатывания открывает переключатель 41, а после истечения другого времени задержки вновь закрывает его. Тем самым с точки зрения контроля за протеканием данного процесса исключаются нежелательные длинные сигналы. Выход элемента ИЛИ 44 воздействует на переключатель 31 и через инвертор 45 на вход Reset первой схемы задержки 46 отключения, которая была установлена от выхода ступени предельного значения 43. Первая схема задержки 46 подает импульсы на вторую схему задержки 47, имеющую задержку включения. Посредством второй схемы задержки 47 включается другой переключатель 48, который замыкает и размыкает выход ступени выбора максимального значения 51 к триггеру Шмитта 52, благодаря чему через переключатель управления 53 последующий сигнал может попадать в элемент ИЛИ 44. Ступень выбора максимального значения 51, с одной стороны, получает от дифференцирующего блока 22 и последовательно включенного инвертора 49 прямой входной сигнал, а с другой стороны, через третье дифференцирующее звено 50 дополнительный дифференцированный входной сигнал. Ступень 51 выбора максимального значения при этом пропускает только сигнал большей величины. Переключатель управления 53, через который сигнал от триггера Шмитта 52 может попасть на элемент ИЛИ 44, срабатывает от пусковой ступени, которая в основном состоит из элементов 54, 55, 56, 57, 58, причем используются измеренные скорость вращения оси frot и сила тяги FMot, полученные из измеренного момента вращения двигателя Mdist
Скорость вращения оси frot дифференцируется во втором дифференцирующем звене 54 и в виде ускорения оси aRadsatz передается через переключатель (напрямую при режиме работы "движение" или соответственно после инвертирования при режиме "торможение") в суммирующее звено 55, к которому подается также сила FMot, полученная от измеренного электрическим путем вращающего момента Mdist. Выходом от суммирующего звена 55 является рассчитанная сила тяги Fz, которую колесо в тот же самый момент времени передает на рельс. При боксовании происходит распределение усилия, при котором только часть силы тяги передается на рельс, а остальная часть усилия идет на ускорение вращающейся массы колеса. Наоборот, при замедлении движения колесной пары кинематическая энергия вновь высвобождается для передачи силы тяги и суммируется с моментом вращения двигателя. То есть, если захотеть определить реально передаваемую на рельс силу тяги, требуется учитывать кинетическую энергию колесной пары. Это осуществляется благодаря тому, что в суммирующем звене 55 к измеренной силе тяги FMot двигателя прибавляется соответственно оцененное в режиме движения со знаком минус, в режиме торможения со знаком плюс, как показано на схеме на позициях 54, 59, 55, ускорение колесной пары вместе с ее массой (также измеренной).
Определенная таким образом сила тяги Fz дифференцируется в первом дифференцирующем звене 56 и через звено "НЕ" 57 передается на переключатель 58 порогового значения, который управляет переключателем 53. Только при отрицательном значении на выходе первого дифференцирующего звена 56, т.е. при убывающей силе тяги, срабатывает переключатель 58 порогового значения, в результате чего элемент ИЛИ 44 не получает другого входного сигнала через b-вход и, если на a-входе к этому моменту также не возникает входного сигнала, выходной сигнал больше не подается. Благодаря этому через Peset ввод первая схема задержки 46 возвращается в исходное положение. Она вновь включается лишь тогда, когда ускорение или замедление размыкает ступень 43 предельного значения и через функциональный элемент ИЛИ 44 срабатывает переключатель 31 для воздействия на интегратор 13, т.е. начинается новый цикл боксования.
Если устройство формирования разности 6 выявляет разность скорости вращения, на рельсы передается скольжение, которое обеспечивает передачу максимального усилия. Колеса входят в нестабильную зону скольжения, т.е. с увеличением проскальзывания сила сцепления будет уменьшаться. Теперь возрастающий избыточный вращающий момент ускоряет относительно быстро с помощью тягового двигателя лишь небольшую по сравнению с массой единицы подвижного состава вращающуюся массу колесной пары. Увеличение разности скорости вращения регистрируется дифференцирующим блоком 22 и подается через блок задержки 40 и переключатель 41 для воздействия на ступень 43 предельного значения. Блок задержки 40 служит для отфильтровывания кратковременных помех. Выходной сигнал воздействует через элемент ИЛИ 44 на переключатель 31, благодаря чему сигнал, сформированный из ожидаемого значения ускорения от ввода 11 и прибавленной к этому значению константы (суммирующее звено 33) и инвертируемый в инверторе 34, становится эффективным на входе интегратора 13 после прохождения через ступень задержки 32 и суммирующее звено 12. Ступень задержки 32 немедленно пропускает часть сигнала, остальная часть сигнала с задержкой первого порядка увеличивается до полной величины. Ступень 32 задержки не содержит замедления спадания данного сигнала, как обозначено символически. Интегратор 13 благодаря этому функционирует медленнее и начинает интегрировать в обратном направлении, пока дополнительный сигнал превышает прямой сигнал. Тем самым скорость вращения бегунковой псевдооси становится меньше. Благодаря этому именно разность скорости вращения на формирователе разности 6 растет в данный момент еще быстрее, однако одновременно с большей величиной сигнала разности скорости вращения сильнее уменьшается и вращающий момент тягового электродвигателя. Дальнейший процесс ускорения колесной пары прекращается в результате того, что колесная пара начинает "захватывать", т.е. происходит возвращение в стабильную зону скольжения. Поскольку при этом скорость вращения колес вновь приближается к скорости вращения бегунковой псевдооси, то и сигнал разности скорости вращения бегунковой псевдооси, а также сигнал разности скорости вращения на формирователе разности 6 становятся вновь меньше. Однако управление на понижение параметра интегратора 13 через переключатель 31 должно сохраняться еще до тех пор, пока колесная пара вновь не достигнет стабильной зоны скольжения, т.е. через максимальную величину сцепления вернется к показателю сцепления/скольжения. В противном случае данная система оставалась бы в зоне нестабильности и в конце концов попала бы в состояние боксования.
Этой цели служит триггер Шмитта 52, который благодаря инвертору 49 чувствителен к отрицательному значению dDn/dt и, следовательно, уменьшению сигнала разности скорости вращения, а его сигнал также передается на элемент ИЛИ 44. Он становится действенен после срабатывания ступени 43 предельного значения в результате срабатывания второго звена задержки 47 и последующего переключателя 38. При прохождении третьего дифференцирующего звена 50 триггер Шмитта 52 с помощью ступени выбора максимального значения 51 получает дополнительный опережающий сигнал, вследствие чего он может уже срабатывать, прежде чем ступень 43 предельного значения вновь возвратится назад. Таким образом, интервал в выходном сигнале схемы ИЛИ 44 будет предотвращен при прохождении нулевого уровня сигнала dDn/dt. Альтернативно это может быть достигнуто благодаря дополнительной задержки срабатывания ступени 43 предельного значения, в случае выхода из строя элементов 50 и 51. В результате задержки второго звена задержки 47 триггер Шмитта 52 может срабатывать только тогда, когда ступень 43 предельного значения включается на это минимальное время, из-за этого остаются кратковременные помехи, которые не оказывают практического влияния на процесс боксования. Время возврата первого звена задержки 46 определяет, что триггер Шмитта 52 может оставаться эффективным в течение измеряемой продолжительности отрицательного сигнала разности скорости вращения dDn/dt, если предельная ступень 43 уже снова отключена.
Таким образом, триггер Шмитта 52 будет сохранять дополнительный сигнал на интеграторе 13 до тех пор, пока отрицательный сигнал dDn/dt вновь не пересечет нулевое значение.
С помощью узла, состоящего из элементов 54 58 соответственно и 59, которые от порогового переключателя 58 всегда передают только один сигнал, если передаваемая на рельсы сила тяги имеет тенденцию к падению, момент определяется более точно, так как колесная пара вновь через максимальную силу сцепления начинает входить в стабильную зону скольжения. Тогда в этот момент времени возникает сигнал в пороговом переключателе 58 и с помощью переключателя управления 53 включается дополнительно сигнал, появляющийся в триггере Шмитта 52, вследствие чего дополнительный сигнал интегратора 13 бегунковой псевдооси прерывается и она может вновь ускоряться.
Теперь эта известная конструкция, как уже отмечалось, в соответствии с предлагаемым изобретением дополнена блоком передачи 80 и запоминающим блоком максимальных величин 81. Блок передачи 80 преимущественно является линейным передающим звеном с мертвой зоной вначале; запоминающий блок максимальных величин 81 это блок памяти с разгрузочным контуром, который запоминаемое значение преимущественно по экспоненциальной функции вновь приводит к нулю, как только с течением времени на вход не поступает сигнал, превосходящий мгновенное значение. Вход блока передачи 80 расположен на дифференцированной разности скорости вращения dDn/dt (выход дифференцирующего блока 22), а со стороны выхода присоединен к запоминающему блоку максимальных величин 81, который своим выходом (в соответствующем масштабе) присоединен к звену вычитания 9. Данный выход служит напрямую дополнительному понижению посредством вычитания из заданной величины вращающего момента.
Принцип действия заключается в следующем.
В случае мгновенной потери силы сцепления на рельсах в результате набегания колес подвижного состава на мокрые или покрытые смазкой участки пути или при кругом падении характеристики силы сцепления уже при небольшом проскальзывании (например, вода с песком) мгновенно возникает большое ускорение колесной пары. Dn при этом растет очень быстро, а дифференцированное значение dDn/dt мгновенно становится намного больше, чем при нормальном процессе скольжения. Благодаря этому преодолевается мертвая зона блока передачи 80, а излишняя часть через запоминающий блок максимальных величин 81 попадает непосредственно в звено вычитания 9, что ведет к уменьшению заданного значения приводного усилия. Благодаря быстро убывающему моменту на колесах дальнейшее их ускорение прекращается уже при появлении небольшого боксования, а сигнал dDn/dt исчезает. Запоминающий блок максимальных значений 81 еще продолжает поддерживать свой сигнал с помощью констант времени затухания. Если это выбрано надлежащим образом, то с течением времени исчезает уменьшение приводного усилия приблизительно в той мере, в какой оно заменяется в результате одновременно наступающего нормального процесса в известной схеме благодаря снижению скорости вращения бегунковой псевдооси в интеграторе 13, где необходимое приращение Dn для требуемого снижения подготавливается в формирователе разности 6. Привод молниеносно воспринимает новый, уменьшенный по величине вращающий момент и далее функционирует по известной схеме как прежде. Вновь введенная согласно изобретению часть устройства далее больше не используется, так как при нормальных процессах боксования колес мертвая зона блока передачи 80 не превышает значения dDn/dt.
Использование: рельсовый транспорт. Сущность изобретения: при регулировании приводного и/или тормозного усилия тяговых электродвигателей подвижного состава в области граничного сцепления колес с рельсами переход в нестабильную зону скольжения определяют по более сильному ускорению вращения колес, а возврат в стабильную зону скольжения осуществляют снижением величины приводного или соответственно тормозного усилия. В случае использования интегратора в качестве свободной (бегункой) псевдооси с помощью скорости вращения ведущей оси образуют разность скоростей вращения Δn, рассматриваемую как меру проскальзывания колеса. При этом переход в нестабильную зону скольжения фиксируют по первой производной разности скорости вращения dΔn / dt, причем при срабатывании предельной ступени к интегратору подводят дополнительную входную велиичну, которая противодействует введенной заданной величине до возвращения в стабильную зону скольжения. Для того чтобы избежать потери силы сцепления, предлагается дополнительно к снижению приводного или соответственно тормозного усилия, способствующего оценке разности скорости вращения Δ n, производить еще снижение, зависящее от максимально достигнутой величины первой производной dΔn / dt. 1 з.п.ф-лы, 1 ил.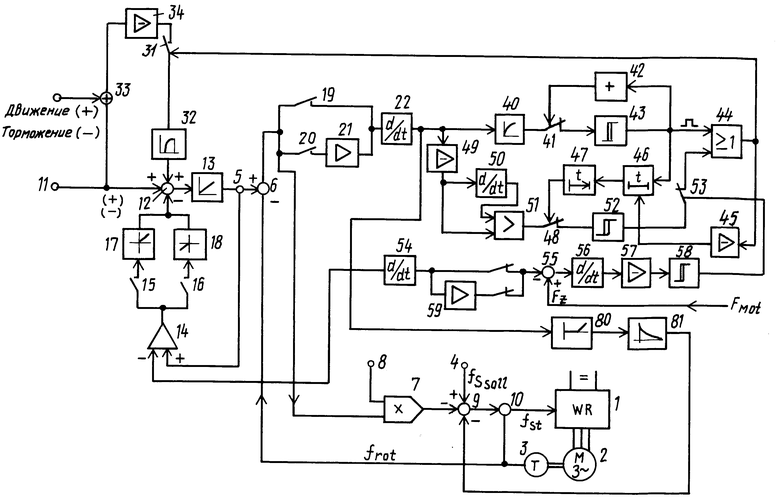
| DE, заявка N 3902846, кл | |||
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
