Изобретение относится к горному делу, строительству, МО, МПС, МЧС, топливно-энергетическому комплексу и другим отраслям промышленности, где могут быть использованы мобильные самоходные установки для бурения неглубоких вертикальных скважин.
Известен ряд отечественных и зарубежных аналогов изобретения, предусматривающих подачу бура (в процессе проходки скважин) при помощи устанавливаемых на шасси транспортных средств гидравлических манипуляторов многоцелевого назначения с многозвенными стрелами, снабженными шарнирными узлами подвески на их конце рабочего инструмента.
Из отечественных к ним можно отнести, например, способ, реализуемый манипулятором МКС-4032 Балашихинского завода кранов-манипуляторов, оснащенным гидробуром (Строительные и дорожные машины, 1995 N 10, стр. 31, рис. 3).
Из зарубежных идентичных способов подачи бура при помощи гидроманипуляторов такого же примерно класса австрийской фирмы PALFINGER, снабженных земляным буром РЕ-500 шнекового типа (Рекламные проспекты Palfinger Hebetechnik GmbH, Moosmuhstrasse 1, A-5203 Kostendorf/Salzburg Austria, изд. 05/92 и 1995).
Согласно указанному известному способу многозвенную стрелу гидроманипулятора выставляют в рабочее положение с ориентацией бура по вертикали, а рабочую подачу последнего при проходке скважины осуществляют перемещением точки его подвеса из верхнего положения вниз посредством соответствующего поворота стрелы в вертикальной плоскости.
При этом в результате перемещения указанной точки по криволинейной траектории (окружности с радиусом, равным длине вращаемого звена) происходит уход бура от вертикали по мере углубления скважины. Данный уход (заваливание) бура корректируют при бурении скважины соответствующим линейным перемещением точки его крепления путем необходимого выдвижения телескопической секции стрелы. При выполнении работы манипулятор обслуживают два человека. Один из них находится в кабине управления, а другой неподалеку от места бурения и осуществляет визуальный контроль за вертикальностью положения инструмента.
В случае сверхдопустимого отклонения бура от вертикали он уведомляет об этом своего напарника и тот производит соответствующую корректировку положения рабочего инструмента вышеуказанным способом.
Таким образом можно бурить неглубокие скважины в труднодоступных (загроможденных различными предметами, например строительными материалами) местах на достаточно большом удалении от места расположения манипулятора.
Однако он сложен в реализации и требует высокой профессиональной подготовки обслуживающего установку персонала.
Указанный недостаток обусловлен использованием ручного режима корректировки положения инструмента в процессе проходки скважины посредством совмещения двух независимых движений стрелы (вращательного и линейного) как при рабочем ходе, так и в процессе извлечения бура из скважины.
Помимо этого рассмотренный способ подачи бура не позволяет в полной мере использовать возможности гидравлических манипуляторов в части обеспечения максимальной глубины бурения за один рейс, поскольку при такой подаче не используется ход телескопической стрелы, так как перед началом работы она устанавливается горизонтально или под углом к горизонту.
Согласно известному способу подачи бура манипулятором [1] перед началом бурения бур выставляют в рабочее положение путем поднятия стрелы манипулятора вверх с ориентацией инструмента по вертикали таким образом, чтобы линия, проходящая через центр вращения стрелы и точку подвеса бура, располагалась под углом β к горизонту, а рабочую подачу последнего при проходе скважины осуществляют перемещением точки подвеса его из верхнего положения вниз по крайней мере на удвоенную величину того же угла посредством соответствующего поворота стрелы в вертикальной плоскости.
При этом необходимая для исключения отклонения траектории движения бура от вертикали корректировка перемещения точки подвеса последнего осуществляется в процессе проходки скважины автоматически путем соответствующего перемещения конца телескопического органа в направлении продольной оси стрелы манипулятора. В результате, при повороте стрелы ее выдвижной концевой элемент с подвешенным на нем буром перемещается по вертикальной прямой линии.
Однако при всех очевидных достоинствах этого известного способа реализация его связана с большими техническими трудностями и материальными затратами. Указанное обстоятельство обусловлено тем, что для обеспечения необходимой траектории движения подаваемого в забой инструмента требуются манипуляторы с очень сложной кинематикой, оснащенные соответствующими органами автоматического управления рабочим процессом.
При бурении сравнительно неглубоких, порядка 5 м и менее, вертикальных скважин такое усложнение явно неоправдано и с экономической точки зрения.
Помимо отмеченного этот известный способ подачи бура обладает тем же недостатком, что и рассмотренные выше аналоги. В связи с особенностями конструктивного исполнения и кинематики движения стрелы манипулятора, используемого при реализации способа, глубина бурения скважины одним рейсом ограничена величиной поворота и выдвижения телескопического органа стрелы.
Из числа известных аналогов предлагаемого технического решения ближайшим (прототипом) может служить способ подачи бура при бурении неглубоких вертикальных скважин, реализуемый при помощи робототехнической механической руки [2]
Указанная механическая рука по сути своей является ничем иным как гидроманипулятором вышерассмотренного типа и служит для подачи тяжелых инструментов, например буров. Она устанавливается в кузове автомобиля на специальных распорках и содержит стойку, размещенную на регулируемом основании. На конце стойки поворотно закрепляется цилиндр вытягивающегося рычага (аналог подъемной секции стрелы гидроманипулятора). К концу этого рычага шарнирно крепится второй вытягивающийся рычаг (аналог выносной и телескопической секции стрелы манипулятора). На цилиндре второго рычага устанавливается запястный механизм, поворачивающий рабочий инструмент. Перемещения механической руки осуществляются гидроприводом.
Реализуемый способ подачи бура манипулятором при бурении неглубоких вертикальных скважин [2] отличается от вышерассмотренных аналогов тем, что в соответствии с ним перед началом бурения подъемную секцию (первый рычаг) механической руки устанавливается горизонтально с ориентацией выносной и телескопической секции (второй рычаг с цилиндром) по вертикали. Рабочую подачу бура осуществляют посредством выдвижения только одной телескопической секции. При этом глубина бурения скважины одним рейсом ограничена ходом телескопа указанной секции, что также не позволяет в полной мере использовать возможности гидравлических манипуляторов рассмотренного типа в части обеспечения максимальной глубины бурения за один рейс.
Задачей изобретения является упрощение способа подачи бура гидроманипулятором многоцелевого назначения при бурении вертикальных скважин и увеличение глубины бурения за один рейс.
Это достигается тем, что согласно предлагаемому способу перед началом бурения подъемную секцию стрелы гидроманипулятора устанавливают под углом b к горизонту, выносную и телескопические секции стрелы с буром ориентируют вертикально. На начальном участке проходки скважины рабочую подачу бура осуществляют опусканием подъемной секции стрелы из верхнего положения вниз на удвоенную величину того же угла путем соответствующего поворота ее в вертикальной плоскости. После этого вращение подъемной стрелы прекращается, а дальнейшую подачу бура производят посредством выдвижения телескопической секции указанного угла b определяют из условия гарантированного обеспечения при проходке скважин допускаемого в практике бурения отклонения их от вертикали.
На фиг. 1 показан установленный на шасси транспортного средства гидравлический манипулятор многоцелевого назначения, реализующий предлагаемый способ подачи бура при бурении неглубоких скважин, в исходном положении; на фиг. 2 положение рабочих органов гидроманипулятора и бура в конце рейса; на фиг. 3 схема, поясняющая характер движения рабочих органов гидроманипулятора и инструмента при реализации предлагаемого способа.
Предлагаемый способ подачи бура 1 установленным на шасси 2 транспортного средства 3 гидроманипулятором 4 многоцелевого назначения при бурении вертикальных скважин 5 заключается в предварительной выставке бура в рабочее положение, последующем перемещении его к забою и извлечении из скважины по окончании ее проходки. При выставке бура в рабочее положение подъемную секцию 6 (прямая ОС) стрелы 7 гидроманипулятора устанавливают под углом b к горизонту (прямая ОЕ) с ориентацией выносной и телескопической секций 8 и 9 стрелы 7 с буром 1 по вертикали (прямая СЖ). На начальном участке ЖМ (равном отрезку СД) углубления скважины рабочую подачу бура 1 осуществляют опусканием подъемной секции 6 стрелы 7 из верхнего положения вниз на удвоенную величину того же угла b путем соответствующего поворота ее в вертикальной плоскости относительно шарнира 10 поворотной стойки 11 гидроманипулятора. При этом точка С (12) шарнирного подвеса выносной секции 8 стрелы 7 перемещается по криволинейной траектории 13 (окружности радиуса R, численно равного длине подъемной секции 6 стрелы 7).
В конце участка траектория СЕ, вследствие ее криволинейности бур 1 уходит (отклоняется) от вертикали на расстояние А (отрезок БЕ), заваливаясь на угол gд После прохождения точкой подвеса 12 выносной секции 8 стрелы 7 горизонтального положения ОЕ она опускается ниже его на угол β При этом подъемная секция 6 стрелы 7 занимает положение ОД.
К этому моменту бур 1 вследствие того же самого обстоятельства вновь приводится к вертикали (γ = 0°) При этом корректировка вертикальности положения бура 1 на участке поворота подъемной секции 6 стрелы 7 на угол 2β осуществляется сама собой (автоматически) без вмешательства обслуживающего персонала.
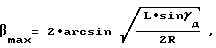
Максимально возможную величину угла поворота подъемной секции 6 стрелы 7 определяют по формуле
где
L расстояние от точки подвеса выносной секции стрелы до нижнего среза бура, м;
γд допускаемый нормативными документами угол отклонения скважины от вертикали, рад (в спектре бурения неглубоких скважин, например, под сваи, его принимают равным 0,0174-0,0262 рад);
R радиус поворота точки подвеса выносной секции стрелы, численно равный длине подъемной секции стрелы, м.
При перемещении узла подвеса 12 выносной секции 8 стрелы 7 в точку Д вращение подъемной секции 6 стрелы 7 прекращают. Дальнейшую подачу бура 1 производят посредством выдвижения с необходимой скоростью телескопической секции 9 стрелы 7 на полную длину телескопа МН. На этом рабочий рейс углубления (проходки) скважины заканчивается.
При этом проходимая за один рейс глубина скважины составляет
H h + lт,
где
lт длина телескопа, м;
h определяют по формуле
h = 2•R•sinβ (в м);
b угол наклона подъемной секции стрелы к горизонту, рад.
По окончании рейса бур 1 в обратном порядке поднимают на поверхность, где осуществляют очистку, наращивание, при необходимости, его длины посредством установки необходимого количества быстросъемных удлинителей (бурильных штанг) и подготовку к выполнению очередного рейса.
Предлагаемый способ несложен в реализации и позволяет существенно увеличить глубину проходки вертикальных скважин при подаче бура гидроманипуляторами многоцелевого назначения за один рейс с соблюдением нормативных требований, предъявленных к вертикальности бурения.
При отсутствии фронта бурильных работ бур легко снимается с телескопической секции стрелы и на его место устанавливается другой рабочий инструмент, после чего манипулятор может быть использован для выполнения других задач.
В настоящее время АОЗТ "НК Уралтерминалмаш" проведены поисково-расчетные и проектные проработки, утверждена комплексная программа, предусматривающая выпуск конструкционной документации, изготовления и испытаний в 1997 году легкосъемного бурильного агрегата многоцелевого назначения "Синегорец-75", реализующего предлагаемый способ подачи бура при проходке вертикальных скважин.
Выполнение организацией работы подтверждают возможность получения при осуществлении изобретения вышеупомянутого технического результата, заключающегося в упрощении способа подачи бура гидроманипуляторами многоцелевого назначения при бурении вертикальных скважин и увеличения глубины бурения за один рейс.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОДАЧИ БУРА ГИДРОМАНИПУЛЯТОРОМ ПРИ БУРЕНИИ ВЕРТИКАЛЬНЫХ СКВАЖИН | 1995 |
|
RU2105858C1 |
| ГИДРОМАНИПУЛЯТОР | 1995 |
|
RU2107655C1 |
| СОРТИМЕНТОВОЗНЫЙ КРАН-МАНИПУЛЯТОР | 1996 |
|
RU2123947C1 |
| ОСНОВАНИЕ ОПОРНО-ПОВОРОТНОГО УСТРОЙСТВА ГИДРОМАНИПУЛЯТОРА | 1996 |
|
RU2124470C1 |
| СОРТИМЕНТОВОЗНЫЙ КРАН-МАНИПУЛЯТОР | 1996 |
|
RU2124447C1 |
| ПОВОРОТНЫЙ ЛОЖЕМЕНТ | 1996 |
|
RU2122499C1 |
| СТОЙКА ПОВОРОТНАЯ ГИДРОМАНИПУЛЯТОРА | 1996 |
|
RU2111162C1 |
| ГРУЗОВАЯ ПЛАТФОРМА СОРТИМЕНТОВОЗНОГО КРАНА-МАНИПУЛЯТОРА | 1996 |
|
RU2124446C1 |
| СТОЙКА ПОВОРОТНАЯ ГИДРОМАНИПУЛЯТОРА | 1995 |
|
RU2085471C1 |
| ПОВОРОТНОЕ УСТРОЙСТВО НЕСУЩЕЙ СТОЙКИ ГИДРОМАНИПУЛЯТОРА | 1995 |
|
RU2091292C1 |
Изобретение относится к горному делу, строительству и другим отраслям промышленности, где могут быть использованы самоходные установки для бурения неглубоких вертикальных скважин. Сущность изобретения: в предварительной выставке бура в рабочее положение гидроманипулятором, последующим перемещении его к забою и измельчении из скважины по окончании ее проходки, при выставке бура подъемную секцию стрелы манипулятора устанавливают под углом β выше горизонта с ориентацией выносной и телескопической секций стрелы с буром по вертикали, на начальном участке углубления скважины рабочую подачу обура осуществляют опусканием подъемной секции стрелы манипулятора из верхнего положения вниз на удвоенную величину того же угла β путем соответствующего поворота ее в вертикальной плоскости, при этом максимальную величину угла β определяют по формуле
где L - расстояние от точки подвеса выносной секции стрелы гидроманипулятора до нижнего среза бура, м, γд - допускаемый нормативными документами угол отклонения скважины от вертикали, рад, R - радиус поворота точки подвеса выносной секции стрелы, численно равный длине подъемной секции стрелы манипулятора, м, после поворота секции стрелы на угол 2β вращение ее прекращают, а дальнейшую подачу производят путем выдвижения телескопической секции стрелы гидроманипулятора на полную длину телескопа. 1 з.п.ф-лы, 3 ил. 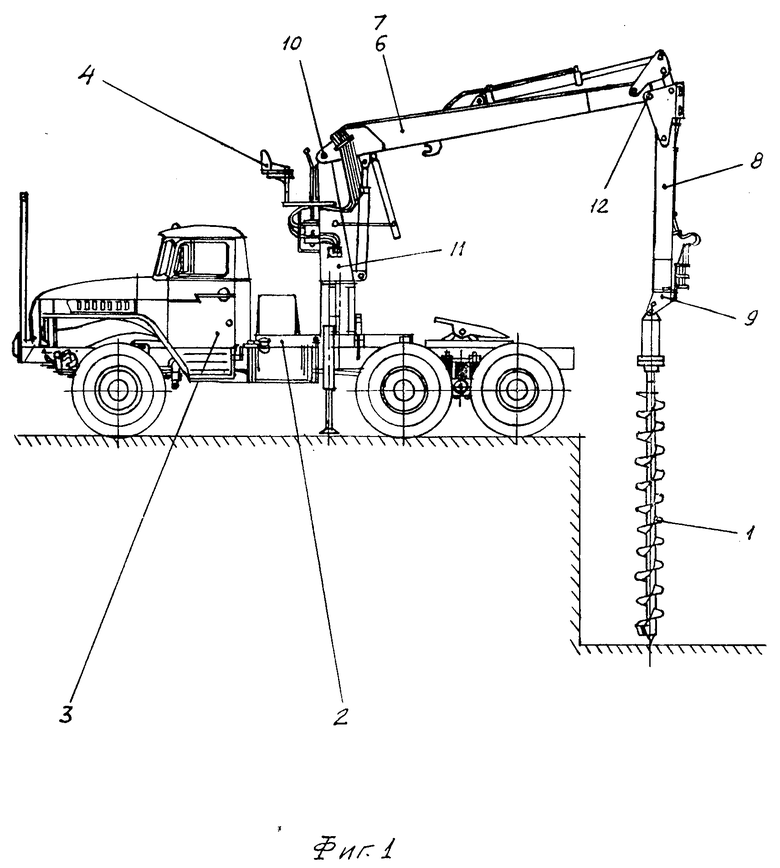
где L расстояние от точки подвеса выносной секции стрелы гидроманипулятора до нижнего среза бура, м;
γд допускаемый нормативными документами угол отклонения скважины от вертикали, рад;
R радиус поворота точки подвеса выносной секции стрелы, численно равный длине подъемной секции стрелы манипулятора, м.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| US, патент, 4130168, кл | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| US, патент, 4645084, кл | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |

