Изобретение относится к области подъемно-транспортного машиностроения и касается самоходных кранов-манипуляторов стрелового типа.
Заявляемый сортиментовозный кран-манипулятор может быть использован на различного рода предприятиях, преимущественно, лесных отраслей для погрузки, перевозки и разгрузки сортиментов (круглых распиленных бревен по ГОСТ 9462-88, 9463-88 длиной от двух до шести метров), а также в строительстве, нефтегазовом и других комплексах народного хозяйства, где имеется потребность в транспортировке аналогичного рода и других длинномерных материалов.
Известен ряд аналогов изобретения как отечественной, так и зарубежной разработки (см. , например, бортовой кран-манипулятор по авт.свид. SU N 651993, В 60 P 1/50, за 1979 год и транспортное средство для перевозки груза по пат. N 5308216 США, В 60 P 1/54 и др.).
Однако, реализованные в большинстве из них схемы компоновки грузоподъемных средств на шасси используемых в их составе автомобилей и укладки стрелового оборудования в транспортном положении достаточно сложны в конструктивном исполнении, не совсем рациональны и в ряде случаев ограничивают функциональные возможности данного вида техники.
Из числа известных аналогов изобретения ближайшим (прототипом) может служить построенный на преобразованном шасси ТАТRA 815-2LPA 6х6 кран-манипулятор фирмы TATRA Koprivnice (GSFR) для перевозки короткой древесины длиной от двух до шести метров, общий вид которого приведен в рекламном проспекте указанной фирмы 1995 года издания, демонстрировавшемся (распространявшемся) на втором Российском автосалоне, проводившемся 23-29 августа 1995 года (г. Москва, Красная Пресня) с участием АО TATRA.
При необходимости указанный проспект может быть получен в Московском представительстве АО TATRA в СНГ (г.Москва, Посольство Чешской республики, ул. Юлиуса Фучика, 12/14, тел.250-24-30).
Конструктивно он выполнен в виде смонтированной на трехосном автомобильном шасси приварной силовой надстройки (сортиментовозной платформы), состоящей из лонжеронной рамы с развитой хвостовой частью, на которой размещен гидроманипулятор "Логлифт-65" известной финской фирмы ЛОГЛИФТ.
К переднему торцу сортиментовозной платформы приварена защитная стенка. Она выполнена из двух, расположенных в ее средней части, вертикальных несущих стоек, на которых закреплено сваренное из труб каркасное ограждение сетчатой структуры.
При наличии в погружаемом материале сортиментов небольшого диаметра они при погрузке, либо в процессе транспортировки могут проскочить сквозь ячейки ограждения и повредить кабину автомобиля известного крана.
На верхних полках лонжеронов платформы установлены шесть коников, образующих силовое ложе для укладки сортиментов. Боковые стойки коников выполнены в виде регулируемых по высоте равнопрочных балок.
В транспортном положении при не загруженной сортиментами платформе аутригеры основания гидроманипулятора известного крана ориентируют вертикально, а грузоподъемную стрелу его укладывают прямо на платформу с ориентацией ее по ходу движения крана. При этом узел шарнирного сочленения подъемной и выносной секций стрелы размещается неподалеку от заднего моста автомобиля, а телескопическая секция стрелы вытянута в направлении к защитной стенке и несколько приподнята, что позволяет сориентировать челюстной захват гидроманипулятора по вертикали и установить его на специальную профилированную опору (ложемент), утопленную ниже верхнего среза основания коников.
При такой схеме укладки стрелового оборудования гидроманипулятора сортиментовозная платформа известного крана оказывается, практически, полностью занятой.
При транспортировке сортиментов грузоподъемная стрела трансформируется (вытягивается) в горизонтальную линию, а челюстной захват с наклоном книзу вводят в щелевой просвет между защитной стенкой и перевозимыми сортиментами и укладывают прямо на них.
Это решение не совсем удачное, поскольку не позволяет укладывать сортименты вплотную к защитной стенке, чтобы ограничить их перемещение в осевом направлении в процессе транспортировки, в том числе и при резком торможении крана.
Кроме того, при такой компоновке во время движения крана-манипулятора, особенно по сильнопересеченной местности, могут иметь место взаимные подвижки и соударения перевозимых сортиментов и челюстного захвата, что в общем-то нежелательно из-за возможности повреждения конструкции последнего.
Сортименты, перевозимые на указанном кране-манипуляторе, стягивают в пакет и фиксируют проволочной петлей-удавкой, натяжение которой осуществляют посредством скрутки входящих в нее проволочных нитей.
Указанный способ крепления сортиментов трудоемок, а используемые при этом удавки являются элементами разового действия.
Задачей настоящего изобретения является оптимизация конструкции и улучшение эксплуатационных характеристик заявляемого сортиментовозного крана-манипулятора.
В соответствии с изобретением решение поставленной задачи достигается следующим образом.
В предлагаемом сортиментовозном кране гидроманипулятор расположен на грузовой платформе, выполненной длиннее рамы шасси автомобильного тягача на величину приставки, которая выполнена модульной.
Грузоподъемная стрела гидроманипулятора крана в транспортном положении при не загруженной сортиментами платформе сложена в компактный узел и опущена шарнирным сочленением подъемной и выносной секций в зоне расположения заднего моста тягача на ложемент платформы, а при загруженной сортиментами платформе элементы конструкции грузоподъемной стрелы и челюстного захвата манипулятора фиксируются на грузовой платформе с обеспечением гарантированного зазора между стрелой и транспортируемым грузом.
При этом в транспортном положении при не загруженной сортиментами платформе она сложена в компактный узел путем подтягивания выносной секции, во внутреннюю полость которой утоплена телескопическая секция, к подъемной секции с обеспечением автоматической стыковки при помощи сцепного устройства, и зафиксирована при помощи шкворней на ложементе платформы, который выполнен двухпозиционным и поворотным, с креплением челюстного захвата на платформе вблизи основания опорно-поворотного устройства гидроманипулятора быстросъемным устройством.
В транспортном положении при загруженной сортиментами платформе грузоподъемная стрела гидроманипулятора крана уложена на ложемент силовой перекладины защитной стенки, а челюстной захват плоской боковой поверхностью - на жестко связанную со стенкой и расположенную над кабиной тягача наклонную площадку с обеспечением фиксации быстросъемным механическим замком.
Основание опорно-поворотного устройства гидроманипулятора установлено на верхних полках лонжеронов рамы грузовой платформы с базированием по четырем точкам и фиксацией в продольном направлении при помощи приваренных к ним плоских ограничительных упоров со скошенными эаходными кромками и поперечными направляющими стенками, взаимодействующими с сопрягаемыми с ними элементами конструкции основания, и закреплено при помощи накидных упоров и спрофилированных по внешнему обводу нижней части лонжеронов планок со стяжными шпильками, охватывающими лонжероны с обеих сторон, с обеспечением центрирования относительно продольной оси симметрии крана посредством взаимодействующих с боковыми стенками лонжеронов упорных винтов, вворачиваемых в резьбовые отверстия приваренных к основанию опорно-поворотного устройства кронштейнов.
Грузовая платформа закреплена на лонжеронах преобразованной рамы шасси серийного автомобильного тягача при помощи разнесенных по ее длине резьбовых стяжек П-образной конфигурации и размещенных с обеих сторон в хвостовой части четырех пар, стягиваемых болтами, кронштейнов, верхние из которых приварены к стенкам лонжеронов платформы, а нижние - расположены напротив них и закреплены болтами на стенках лонжеронов модульной приставки, пристыкованной к раме шасси тягача.
Сцепное устройство для автоматической стыковки выносной и подъемной секций грузоподъемной стрелы гидроманипулятора крана в сложенном положении выполнено в виде двух соосно спаренных зацепов крюкообразной формы, разнесенных в поперечном направлении, с образованием между ними паза П-образного профиля для укладки в него хвостовика телескопической секции стрелы, и соосно приваренных к щекам хвостовика установочных пальцев, стягиваемых с крюками зацепов, причем на одном из зацепов шарнирно закреплена при помощи болтового соединения страховочная накидная тяга с монтажно-компенсационным пазом, надеваемая на сочленяемый с ней установочный палец хвостовика телескопической секции стрелы.
Двухпозиционный поворотный ложемент выполнен с возможностью фиксации в вертикальном положении с выступанием над лицевой поверхностью основания платформы и в горизонтальном - с заглублением ниже нее.
Быстросъемное устройство крепления челюстного захвата гидроманипулятора на незагруженной сортиментами платформе выполнено в виде пропущенной сквозь его челюсти накидной планки, поджимающей захват к основанию платформы при помощи двух самоневыпадающих винтов.
Грузоподъемная стрела гидроманипулятора в транспортном положении при загруженной сортиментами платформе зафиксирована в ложементе силовой перекладины защитной стенки посредством взаимодействующих со щеками и установочными пальцами хвостовика телескопического секции поперечных ограничителей и осевых упоров ложемента.
Быстросъемный механический замок крепления челюстного захвата гидроманипулятора на наклонной площадке защитной стенки платформы выполнен в виде охватывающей боковину одной из примыкающих к опорной поверхности площадки челюстей захвата накидной скобы П-образной конфигурации, резьбовые концы которой пропущены сквозь отверстия в площадке и закреплены с обратной стороны ее гайками.
Каждый из коников грузовой платформы снабжен быстродействующим натяжным устройством ленточно-цепного типа с рычажно-эксцентриковым приводом для стягивания в пакет и фиксации перевозимых сортиментов.
Сущность изобретения поясняется чертежом, где изображены:
на фиг. 1 - общий вид сортиментовозного крана-манипулятора в транспортном положении при незагруженной грузовой платформе;
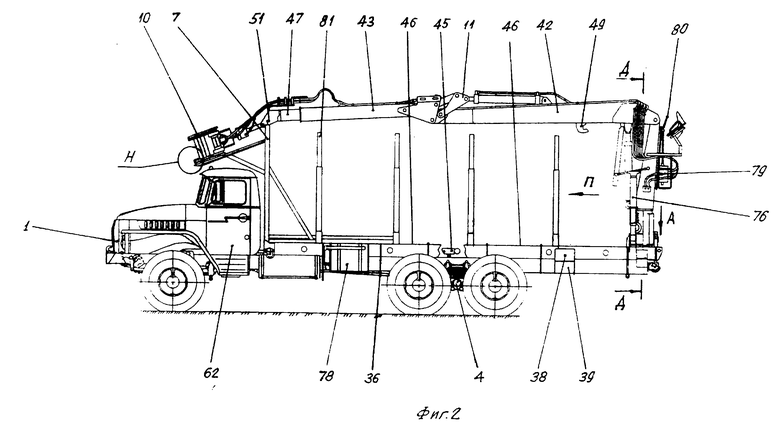
на фиг. 2 - общий вид сортиментовозного крана-манипулятора в транспортном положении при загруженной грузовой платформе (сортименты условно не показаны);
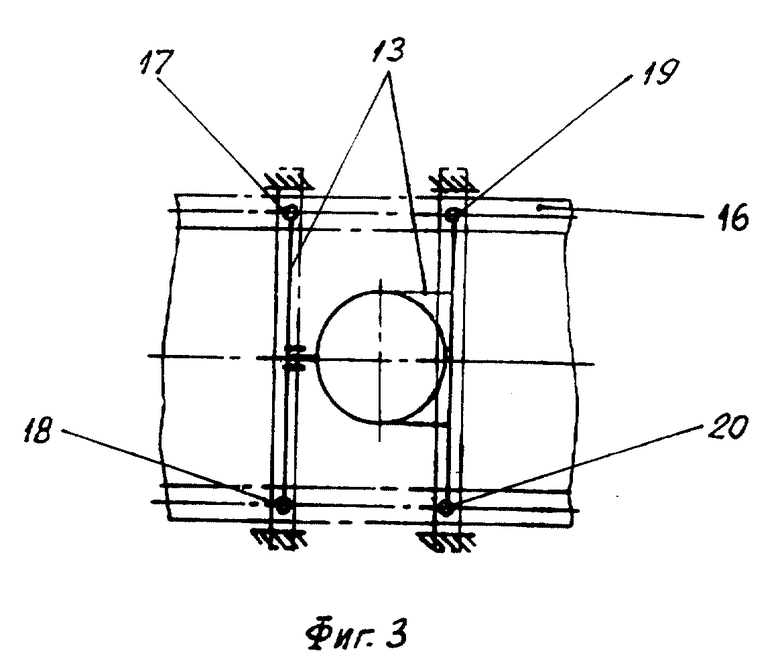
на фиг. 3 - схема, поясняющая конструкцию основания опорно-поворотного устройства гидроманипулятора;
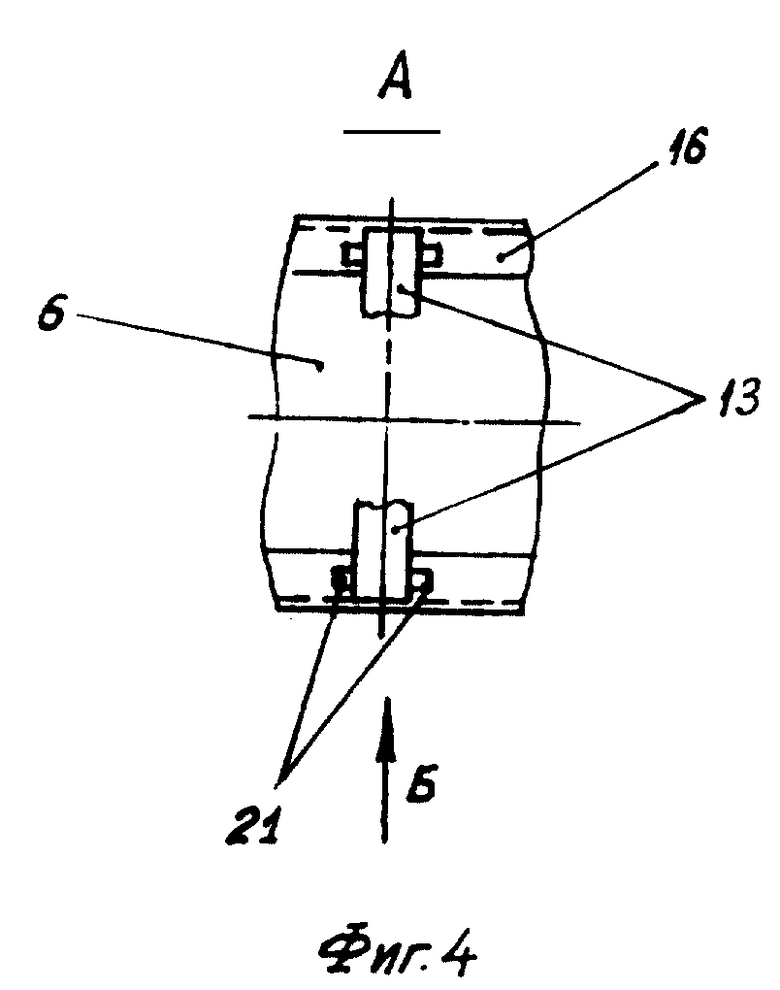
на фиг. 4 - вид А сверху на хвостовую часть грузовой платформы в зоне базирования на ней гидроманипулятора;
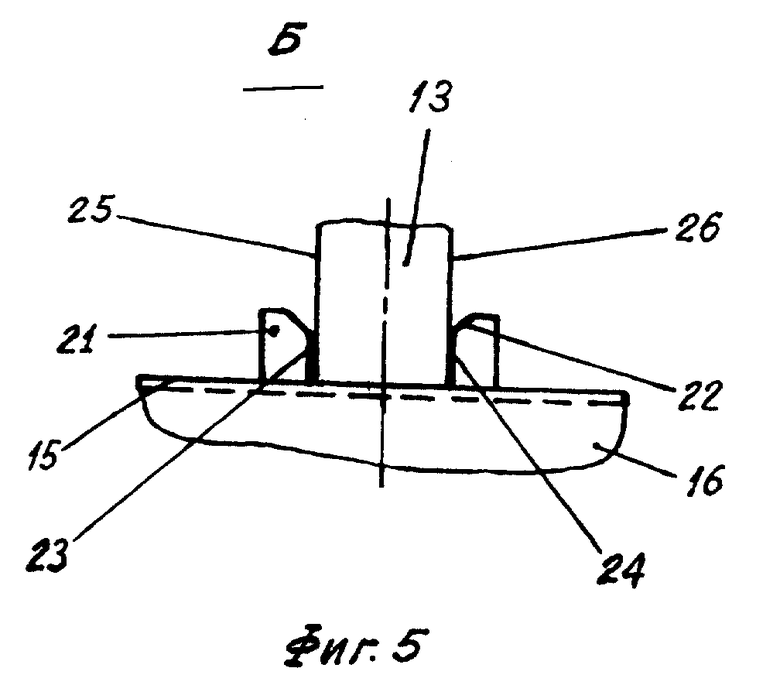
на фиг. 5 - вид Б сбоку на заднюю балку основания опорно-поворотного устройства гидроманипулятора в зоне базирования его на верхних полках лонжеронов грузовой платформы;
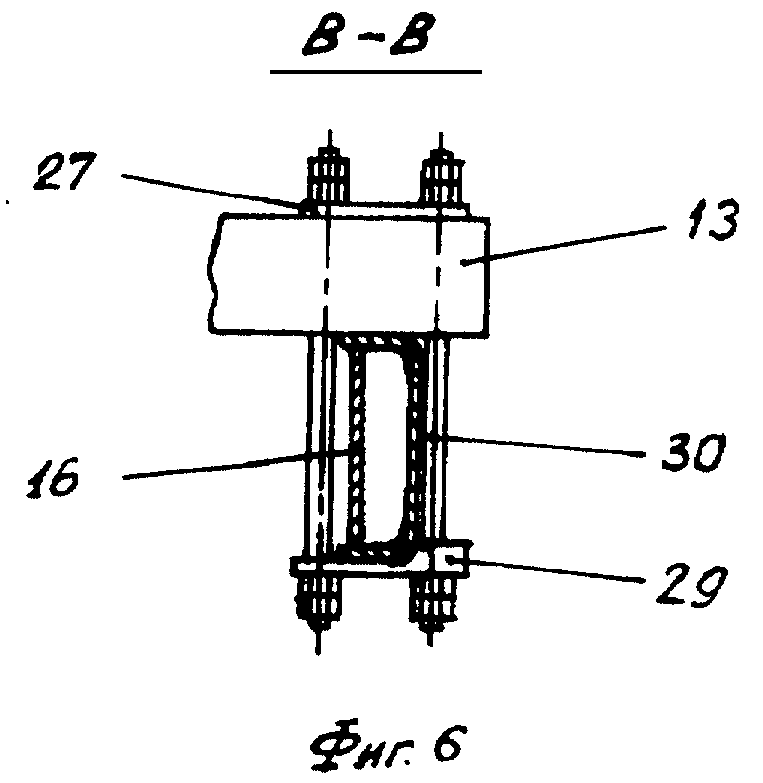
на фиг. 6 - поперечное сечение В-В по месту крепления основания опорно-поворотного устройства гидроманипулятора к лонжеронам рамы грузовой платформы;
на фиг. 7 - поперечное сечение Г-Г по месту крепления основания опорно-поворотного устройства гидроманипулятора к лонжеронам рамы грузовой платформы и модульной приставки ;
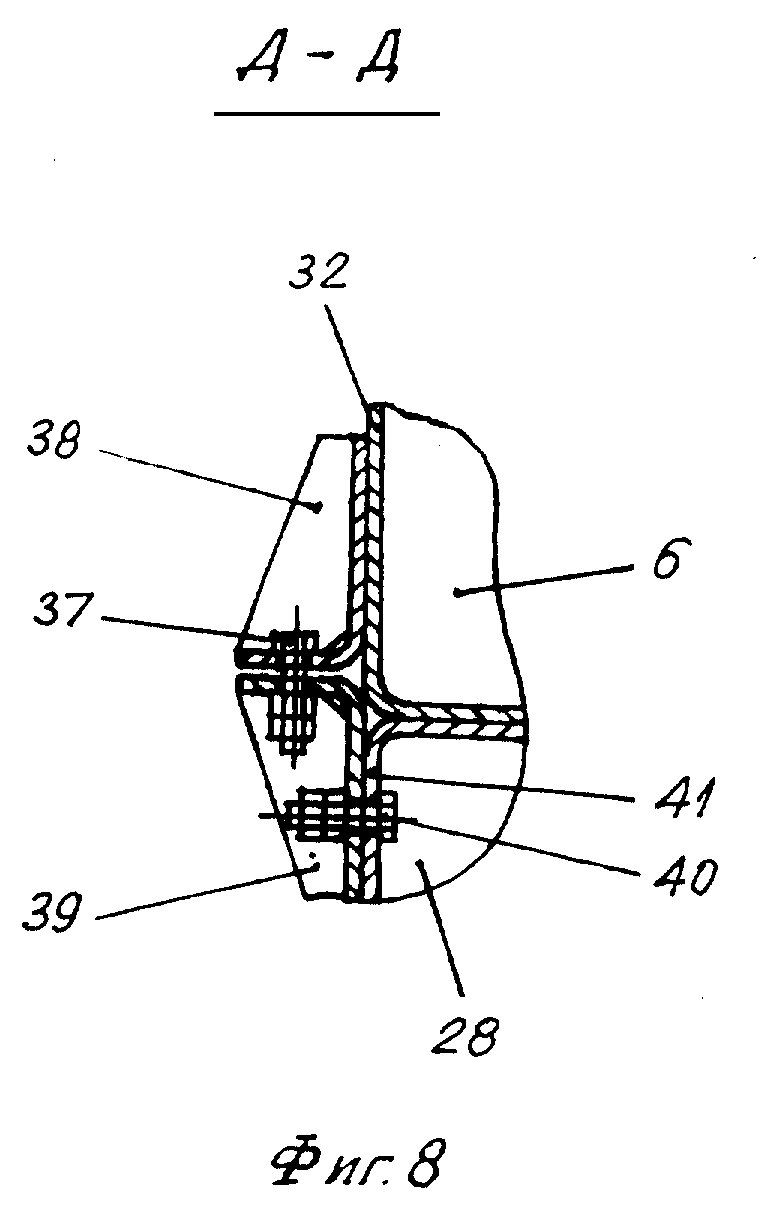
на фиг. 8 - поперечное сечение Д-Д по месту крепления рамы грузовой платформы к модульной приставке;
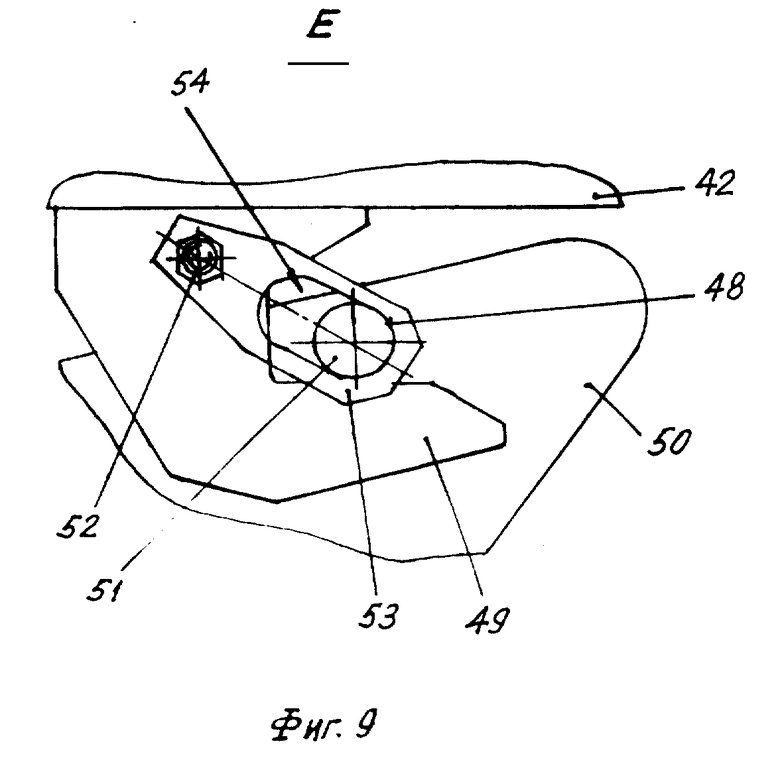
на фиг. 9 - выносной элемент Е, поясняющий конструкцию узла фиксации выносного хвостовика телескопической стрелы в зацепах подъемной стрелы гидроманипулятора;
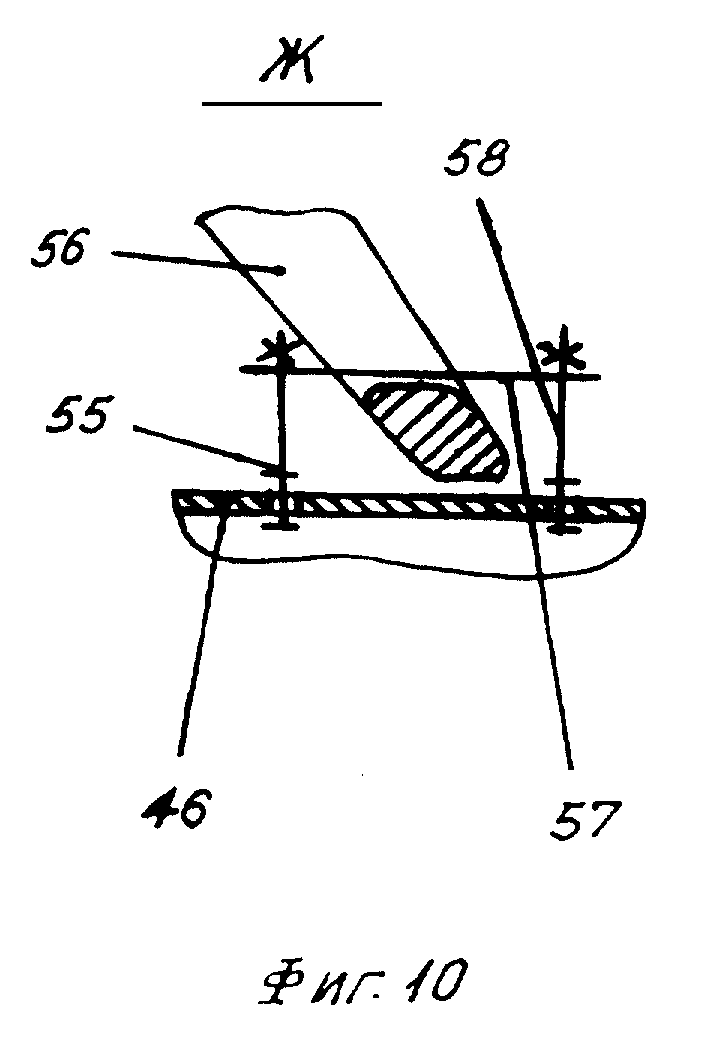
на фиг. 10 - вид Ж на узел крепления челюстного захвата гидроманипулятора при незагруженной грузовой платформе;
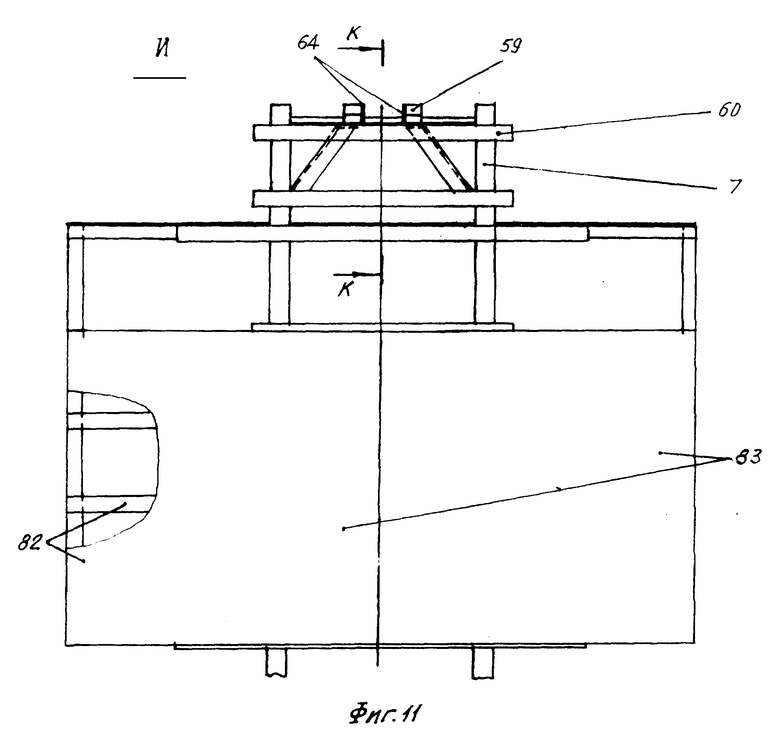
на фиг. 11 - вид И на тыльную поверхность защитной стенки грузовой платформы;
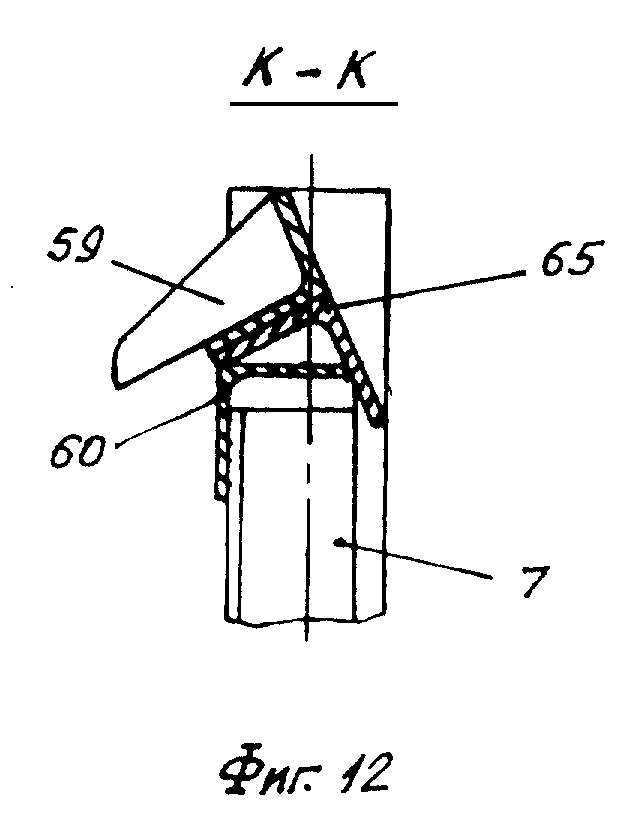
на фиг. 12 - поперечное сечение К-К защитной стенки грузовой платформы по месту расположения ложемента под хвостовик телескопической стрелы гидроманипулятора;
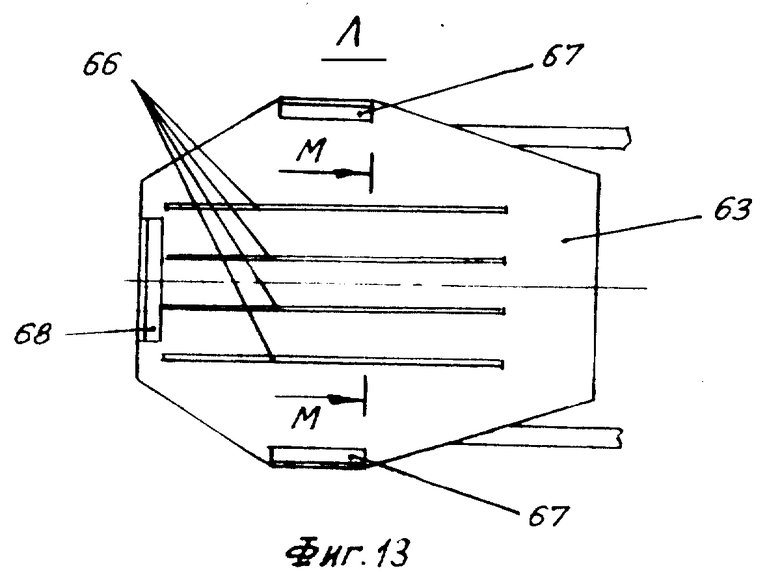
на фиг. 13 - вид Л сверху на наклонную площадку грузовой платформы;
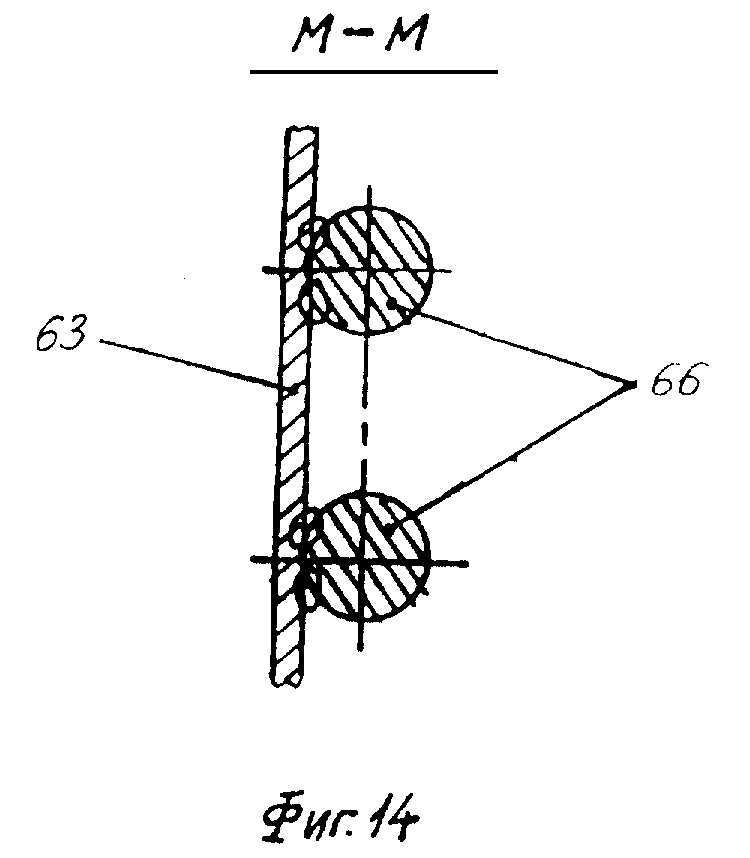
на фиг. 14 - поперечное сечение М-М наклонной площадки грузовой платформы;
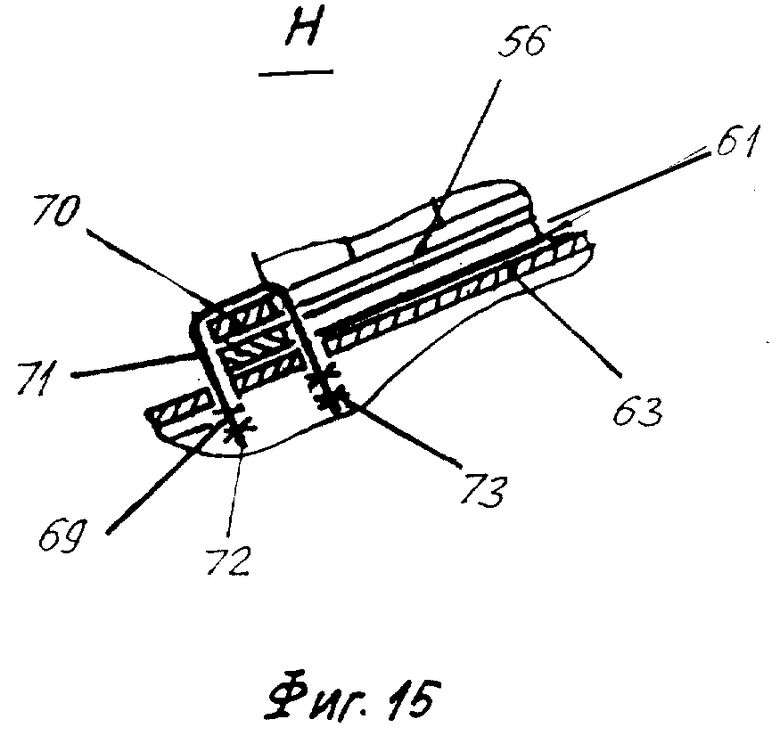
на фиг. 15 - выносной элемент Н, поясняющий конструкцию узла крепления челюстного захвата манипулятора на наклонной площадке грузовой платформы;
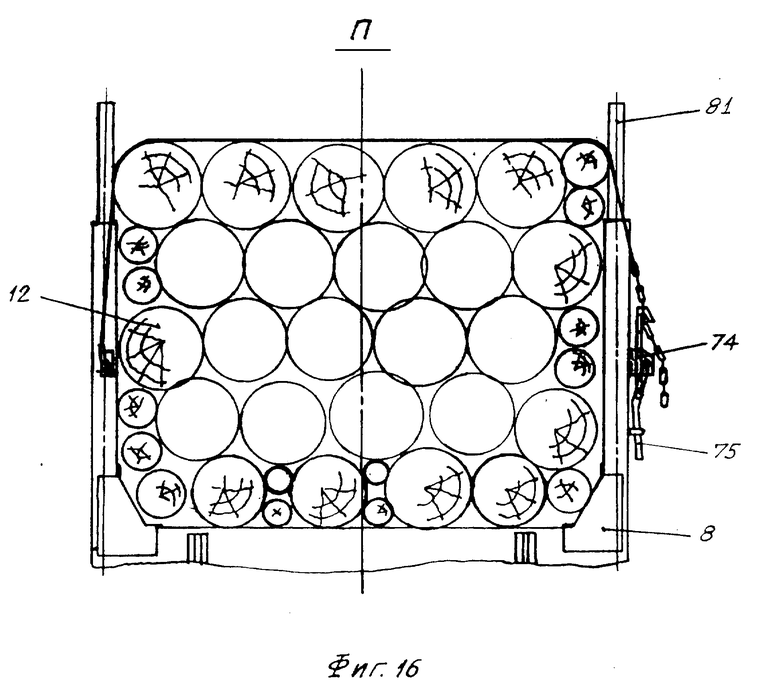
на фиг. 16 - вид П сзади на перевозимые сортименты;
Заявляемый сортиментовозный кран-манипулятор содержит серийный автомобильный тягач 1, удлинительную приставку 2, присоединенную к раме 3 его шасси 4, на которой установлена грузовая платформа 5 с рамным основанием 6 лонжеронного типа, на котором жестко закреплены защитная стенка 7, коники 8, и расположенный в хвостовой части гидроманипулятор 9 с челюстным захватом 10, грузоподъемная стрела 11 которого размещена в транспортном положении при не загруженной сортиментами 12 платформе на ее рамном основании, а при загруженной сортиментами платформе трансформирована в линию вдоль продольной оси симметрии крана.
Гидроманипулятор 9 крана расположен на грузовой платформе 5, выполненной длиннее рамы 3 шасси 4 тягача 1 на величину приставки 2. Приставка 2 выполнена модульной.
Основание 13 опорно-поворотного устройства 14 гидроманипулятора установлено на верхних полках 15 лонжеронов 16 рамного основания грузовой платформы с базированием по четырем точкам 17-20 и фиксацией в продольном направлении при помощи приваренных к ним плоских ограничительных упоров 21 со скошенными заходными кромками 22 и поперечными направляющими стенками 23, 24, взаимодействующими с сопрягаемыми с ними элементами 25, 26 конструкции основания.
Скошенные заходные кромки 22 упоров 21 способствуют самоориентации основания опорно-поворотного устройства гидроманипулятора при установке его на грузовую платформу крана.
При выполнении указанной операции стенки 23, 24 упоров на препятствуют перемещению гидроманипулятора в поперечном направлении и полностью исключают возможность несанкционированного перемещения его в продольном направлении.
Основание 13 опорно-поворотного устройства гидроманипулятора закреплено на грузовой платформе при помощи накидных упоров 27 и спрофилированных по внешнему обводу нижней части лонжеронов 16, 28 соответственно рамного основания 6 платформы и модульной приставки 2 планок 29 со стяжными шпильками 30, 31, охватывающими лонжероны с обеих сторон.
Обеспечение центрирования основания 13 опорно-поворотного устройства гидроманипулятора относительно продольной оси симметрии крана обеспечивается посредством взаимодействующих с боковыми стенками 32 лонжеронов 16 упорных винтов 33, вворачиваемых в резьбовые отверстия приваренных к основанию опорно-поворотного устройства кронштейнов 34.
Грузовая платформа 5 крана закреплена на лонжеронах 28, 35 преобразованной рамы 3 шасси серийного автомобильного тягача при помощи разнесенных по ее длине резьбовых стяжек 36 П-образной конфигурации и размещенных с обеих сторон в хвостовой части четырех пар, стягиваемых болтами 37, кронштейнов 38, 39.
Верхние из указанных кронштейнов приварены к стенкам 32 лонжеронов 16 платформы 5, а нижние расположены напротив них и закреплены болтами 40 на стенках 41 лонжеронов 28 модульной приставки 2, пристыкованной к раме 3 шасси тягача.
Такое крепление имеет высокое весовое совершенство и обеспечивает достаточную жесткость сопряжения и совместность деформаций грузовой платформы и рамы шасси серийного автомобильного тягача при действии на них эксплуатационных нагрузок.
Грузоподъемная стрела 11 гидроманипулятора 9 в транспортном положении при не загруженной сортиментами платформе 5 сложена в компактный узел и опущена шарнирным сочленением подъемной и выносной секций 42, 43 стрелы в зоне расположения заднего моста 44 шасси тягача 1 на двухпозиционный поворотный ложемент 45 платформы, выполненный с возможностью фиксации в вертикальном положении с выступанием над лицевой поверхностью 46 рамного основания 6 платформы 5 и в горизонтальном - с заглублением ниже ее. При этом складывание грузоподъемной стрелы 11 в компактный узел осуществляют путем подтягивания выносной секции 43, во внутреннюю полость которой утоплена телескопическая секция 47, к подъемной секции 42 с обеспечением автоматической стыковки при помощи сцепного устройства 48.
Сцепное устройство 48 для автоматической стыковки выносной и подъемной секций грузоподъемной стрелы гидроманипулятора в сложенном положении выполнено в виде двух, соосно спаренных, зацепов 49 крюкообразной формы, разнесенных в поперечном направлении, с образованием между ними паза П-образного профиля для укладки в него хвостовика 50 телескопической секции стрелы, и соосно приваренных к щекам хвостовика установочных пальцев 51, стягиваемых с крюками зацепов.
При этом на одном из зацепов 49 шарнирно закреплена при помощи болтового соединения 52 страховочная накидная тяга 53 с монтажно-компенсационным пазом 54, надеваемая на сочленяемый с ней установочный палец 51 хвостовика телескопической секции стрелы.
Указанное техническое решение гарантированно исключает несанкционированное расцепление телескопической секции с зацепами подъемной секции грузоподъемной стрелы 11 гидроманипулятора при движении крана.
Сложенная таким образом и опущенная вниз грузоподъемная стрела гидроманипулятора зафиксирована на ложементе 45 платформы при помощи шкворней.
Челюстной захват 10 в этом положении закрепляют на платформе 5 вблизи основания 13 опорно-поворотного устройства гидроманипулятора быстросъемным устройством 55.
Быстросъемное устройство 55 крепления челюстного захвата гидроманипулятора на незагруженной сортиментами платформе выполнено в виде пропущенной сквозь его челюсти 56 накидной планки 57, поджимающей захват к рамному основанию 6 платформы при помощи двух самоневыпадающих винтов 58.
При такой компоновке (схеме укладки секций стрелового оборудования и челюстного захвата гидроманипулятора в транспортном положении при незагруженной сортиментами платформе) примерно половина рабочей площадки платформы остается свободной и ее, при необходимости, можно использовать во время порожнего рейса для размещения на ней любых грузов (например, навесного оборудования, запасных частей, продуктов питания и т.п.), которые бывает необходимо доставить к месту лесопогрузочных работ.
Грузоподъемная стрела 11 гидроманипулятора 9 крана в транспортном положении при загруженной сортиментами платформе уложена на ложемент 59 силовой перекладины 60 защитной стенки, а челюстной захват 10 плоской боковой поверхностью 61 - на жестко связанную со стенкой и расположенную над кабиной 62 тягача наклонную площадку 63 с обеспечением гарантированного зазора между стрелой и транспортируемым грузом.
В указанном положении грузоподъемная стрела зафиксирована в ложементе 59 силовой перекладины защитной стенки, посредством взаимодействующих со щеками и установочными пальцами 51 хвостовика телескопической секции поперечных ограничителей 64 и осевых упоров 65 ложемента.
При опускании челюстного захвата 10 на наклонную площадку 63, он по цилиндрическим направляющим 66 свободно перемещается под действием собственного веса в крайнее нижнее положение. Упорядоченный (организованный) характер указанного перемещения захвата обеспечивается двумя боковыми 67 и одним передним 68 уголковыми ограничителями площадки.
В крайнем нижнем положении челюстной захват зафиксирован быстросъемным механическим замком 69.
Быстросъемный механический замок 69 крепления челюстного захвата гидроманипулятора на наклонной площадке защитной стенки платформы выполнен в виде охватывающей боковину 70 одной из примыкающих к опорной поверхности площадки челюстей 56 захвата, накидной скобы 71 П-образной конфигурации, резьбовые концы 72 которой пропущены сквозь отверстия в площадке и закреплены с обратной стороны ее гайками 73.
Организованные указанным способом укладка и крепление грузоподъемной стрелы и челюстного захвата на защитной стенке грузовой платформы обеспечивает силовое замыкание частей гидроманипулятора непосредственно на конструкцию рамного основания платформы и полностью исключают механическое воздействие на них перевозимого груза.
Каждый из коников 8 грузовой платформы снабжен быстродействующим натяжным устройством 74 ленточно-цепного типа с рычажно-эксцентриковым приводом 75 для стягивания в пакет и фиксации перевозимых сортиментов.
Основные балочные элементы грузовой платформы и гидроманипулятора крана выполнены из стальных гнутых листовых профилей с высокими механическими свойствами посредством сварки с использованием современного гибочно-штамповочного, металлорежущего, сварочного, термического и другого оборудования, а также прогрессивной технологии.
В большинстве своем они имеют оптимальные пропорции и плавные обводы (округления), локальные подкрепления, обеспечивающие благоприятное распределение силовых нагрузок на углах и гранях и в других местах конструкции.
Реализованные при разработке заявляемого крана современные методы проектирования с проведением всесторонних и тщательных прочностных и других расчетов на ЭВМ, выбранные технические решения и технология изготовления позволили во многих случаях избежать дополнительной механической обработки поверхностей его основных узлов и деталей и до приемлемого предела снизить металлоемкость конструкции без ущерба для потребительских качеств изделия.
Работает заявляемый сортиментовозный кран-манипулятор следующим образом. По прибытии на место проведения лесопогрузочных работ выбирают оптимальное положение крана-манипулятора, обеспечивающее удобный и наибольший фронт работ с одной установки. Устанавливают его в выбранную позицию. Переводят аутригеры 76 в рабочее положение (до встречи их опор с грунтом) и контролируют отклонение поворотной стойки 77 гидроманипулятора 9 от вертикали, используя самоустанавливающийся отвес, который не должен отклоняться за пределы запретной зоны, ограниченной красными штрихами. Перед выполнением этой операции отвес предварительно расфиксируют, обеспечивая свободу его прокачки.
При температуре окружающей среды ниже 0oC перед началом работ подогревают масло в баке 78 гидросистемы 79 до температуры около 15oC. Для подогрева масла используют выхлопные газы двигателя автомобильного тягача, пропускаемые через погруженный в бак теплообменник.
Затем, манипулируя органами управления 80, подводят захват 10 к погружаемому материалу и захватывают его. Далее, приподняв груз на высоту, примерно на 0,5 метра превышающую верхний срез боковых стоек 81 коников 8 платформы 5, переносят его к ней, разворачивают необходимым образом захват и разгружают его. После этого рабочий цикл повторяют.
В случае расположения очередной порции груза за пределами зоны досягаемости челюстного захвата манипулятора, кран переводят в транспортное положение с укладкой стрелы 11 и челюстного захвата на соответствующие элементы конструкции защитной стенки 7 платформы и повторяют вышерассмотренный цикл работ снова.
При погрузке сортименты укладывают вплотную к защитной стенке, каркасное ограждение 82 которой до верхнего среза кабины 62 тягача закрыто листовыми панелями 83, защищающими ее от повреждения в случае неосторожного перемещения, либо падения сортиментов.
При полной загрузке платформы крана-манипулятора сортименты 12 стягивают в пакет и закрепляют быстродействующими натяжными устройствами 74 и переводят его в транспортное положение.
По прибытию к потребителю кран-манипулятор переводят в рабочее положение и в порядке, обратном загрузке, разгружают сортименты.
По окончании разгрузки кран-манипулятор вновь переводят в транспортное положение.
Особенности конструктивного исполнения заявляемого крана-манипулятора позволяют подсоединять к нему серийные прицепы-сортиментовозы, в результате чего он преобразовываться в специализированный сортиментовозный автопоезд с более высокой, примерно в два раза, эффективностью работы.
Заявляемый сортиментовозный кран-манипулятор полностью изготовлен из высококачественных отечественных конструкционных материалов с использованием высокопроизводительного современного обрабатывающего оборудования и прогрессивной технологии.
С учетом этого, а также требований, предъявляемых ГОСГОРТЕХНАДЗОРом страны к такого рода продукции, он может быть многократно воспроизведен по разработанной на него конструкторской документации в условиях серийного производства на специализированных заводах.
Опытные образцы заявляемого сортиментовозного крана-манипулятора (под индексом АС-6-75.00.00.000) разработки ЗАО "НК Уралтерминалмаш", изготовленного на базе серийного автомобильного тягача Урал 4320-1912-30 и устанавливаемой на преобразованной раме его шасси грузовой платформы СП6-00.000 с гидравлическим манипулятором "Синегорец-75", прошли успешную экспериментальную проверку в жестких климатических условиях на ряде предприятий лесных отраслей Дальнего Востока и других регионов страны.
Проведенные испытания подтвердили высокие ходовые и динамические качества, надежность работы, простоту и удобство обслуживания и ремонта предлагаемого крана-манипулятора.
Согласно заключению "Дальлестехцентра" (г. Хабаровска), проводившего испытания, он по своим техническим и эксплуатационным характеристикам, а также внешнему облику в настоящее время является одним из лучших отечественных образцов, а по ряду вышеупомянутых параметров и качеству изготовления не уступает лучшим зарубежным аналогам и даже превосходит их.
Полученные в ходе испытаний данные убедительно свидетельствуют о возможности получения при осуществлении изобретения вышеупомянутого технического результата, заключающегося в оптимизации конструкции и улучшении эксплуатационных характеристик заявляемого сортиментовозного крана-манипулятора и в частности в:
- повышении весового совершенства и упрощении сборки, разборки и технического обслуживания сортиментовозного крана-манипулятора;
- повышении надежности фиксации стрелового оборудования с рабочим органом гидроманипулятора в транспортном положении;
- повышении быстродействия при переводе стрелового оборудования с рабочим органом гидроманипулятора "из рабочего положения в транспортное и наоборот;
- обеспечении необходимой жесткости сопряжения и совместности деформаций грузовой платформы и рамы шасси автомобильного тягача при действии на них эксплуатационных нагрузок;
- высвобождении передней части платформы для технологических нужд во время выполнения порожних рейсов;
- возможности перевозки сортиментов длиной до 6 м при использовании в качестве транспортного средства серийных автомобильных тягачей;
- исключении вероятности механического повреждения стрелового оборудования и рабочего органа гидроманипулятора перевозимыми сортиментами;
- повышении быстродействия стягивания в пакет и безопасности транспортировки сортиментом и др.
| название | год | авторы | номер документа |
|---|---|---|---|
| СОРТИМЕНТОВОЗНЫЙ КРАН-МАНИПУЛЯТОР | 1996 |
|
RU2124447C1 |
| ГРУЗОВАЯ ПЛАТФОРМА СОРТИМЕНТОВОЗНОГО КРАНА-МАНИПУЛЯТОРА | 1996 |
|
RU2122498C1 |
| ГРУЗОВАЯ ПЛАТФОРМА СОРТИМЕНТОВОЗНОГО КРАНА-МАНИПУЛЯТОРА | 1996 |
|
RU2124446C1 |
| ПОВОРОТНЫЙ ЛОЖЕМЕНТ | 1996 |
|
RU2122499C1 |
| КРАН-МАНИПУЛЯТОР ЛЕСОВОЗНЫЙ | 1999 |
|
RU2169673C2 |
| ОСНОВАНИЕ ОПОРНО-ПОВОРОТНОГО УСТРОЙСТВА ГИДРОМАНИПУЛЯТОРА | 1996 |
|
RU2124470C1 |
| КРАН-МАНИПУЛЯТОР МЕТАЛЛОВОЗНЫЙ | 1998 |
|
RU2140367C1 |
| УСТРОЙСТВО ДЛЯ КРЕПЛЕНИЯ ПАКЕТОВ ДЛИННОМЕРНЫХ МАТЕРИАЛОВ | 1996 |
|
RU2105704C1 |
| КРАН-МАНИПУЛЯТОР МЕТАЛЛОВОЗНЫЙ САМОСВАЛЬНОГО ТИПА | 2003 |
|
RU2245804C2 |
| ПОГРУЗЧИК | 2002 |
|
RU2230698C2 |

Изобретение относится к подъемно-транспортному машиностроению. Сортиментовозный кран-манипулятор содержит автомобильный тягач, удлинительную приставку, присоединенную к раме его шасси, на которой установлена удлиненная грузовая платформа с защитной стенкой, кониками и расположенным в хвостовой части гидроманипулятором с челюстным захватом, грузоподъемная стрела которого размещена в транспортном положении при незагруженной сортиментами платформе на ее рамном основании, сложена в компактный узел и опущена шарнирным сочленением на ложемент платформы, а при загруженной сортиментами платформе элементы конструкции грузоподъемной стрелы, трансформированной в линию, и челюстного захвата манипулятора фиксируются быстросъемным устройством на наклонной площадке защитной стенки с обеспечением гарантированного зазора между стрелой и транспортируемым грузом, что позволяет оптимизировать конструкцию и улучшить эксплуатационные характеристики. 10 з.п. ф-лы, 16 ил.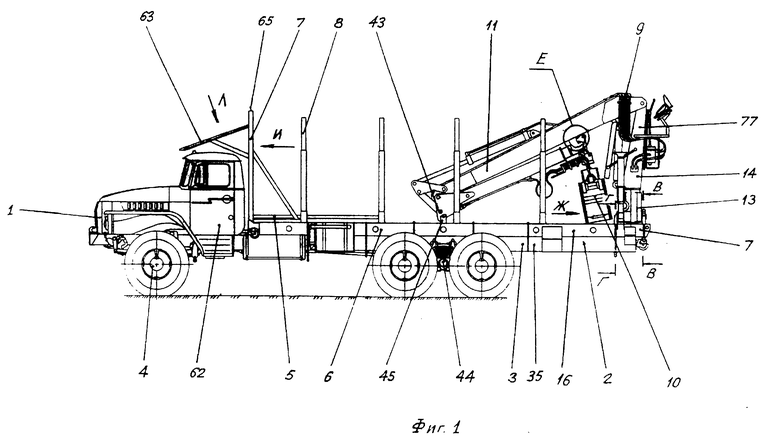
| Грифф М.И | |||
| и др | |||
| Автотранспортные средства с грузоподъемными устройствами | |||
| - М.: Транспорт, 1989, с.66, рис | |||
| Паровоз для отопления неспекающейся каменноугольной мелочью | 1916 |
|
SU14A1 |
| DE 4140916 A1, 17.06.93 | |||
| US 4984961 A, 15.01.91 | |||
| Рекламный проспект фирмы TATRA Koprivnice, CSER, 1995 | |||
| Транспортное средство для перевозки грузов | 1988 |
|
SU1641671A1 |

