Изобретение относится к механизмам, преобразующим силы и перемещения, и может использоваться в конструкциях гидропрессов.
Известен преобразователь давления (авт. св. СССР N 360832, кл. B 30 B 15/16, 1969). Этот преобразователь давления содержит по крайней мере два цилиндра, подпоршневые полости которых заполнены энергоносителем и сообщены между собой, источник питания, соединенный с надпоршневой полостью одного из гидроцилиндров, причем штоки поршней упомянутых гидроцилиндров кинематически соединены между собой с помощью рычага.
Недостатком указанного преобразователя является то, что регулировать получаемые силы можно только путем изменения прикладываемой силы или изменением площадей поперечного сечения поршней.
Наиболее близким к предлагаемому является преобразователь усилия, содержащий гидроцилиндр с сообщающимися между собой полостями, заполненные энергоносителем штоки, связанные между собой с помощью рычага с подвижной от винтового механизма опорой, источник питания, соединенный с надпоршневой полостью силового цилиндра.
Недостатком этого преобразователя, принятого за прототип, является невозможность бесступенчатого регулирования усилия.
Задачей изобретения является создание гидромеханического преобразователя усилия, обеспечивающего непрерывное регулирование усилия.
Это достигается тем, что в преобразователе усилия, содержащем гидроцилиндры, с сообщающимися между собой полостями, заполненными энергоносителем, штоки поршней связаны между собой с помощью рычага с подвижной от винтового механизма опорой, которая представляет собой ходовую гайку винтового механизма, винт которой расположен перпендикулярно ходу поршней.
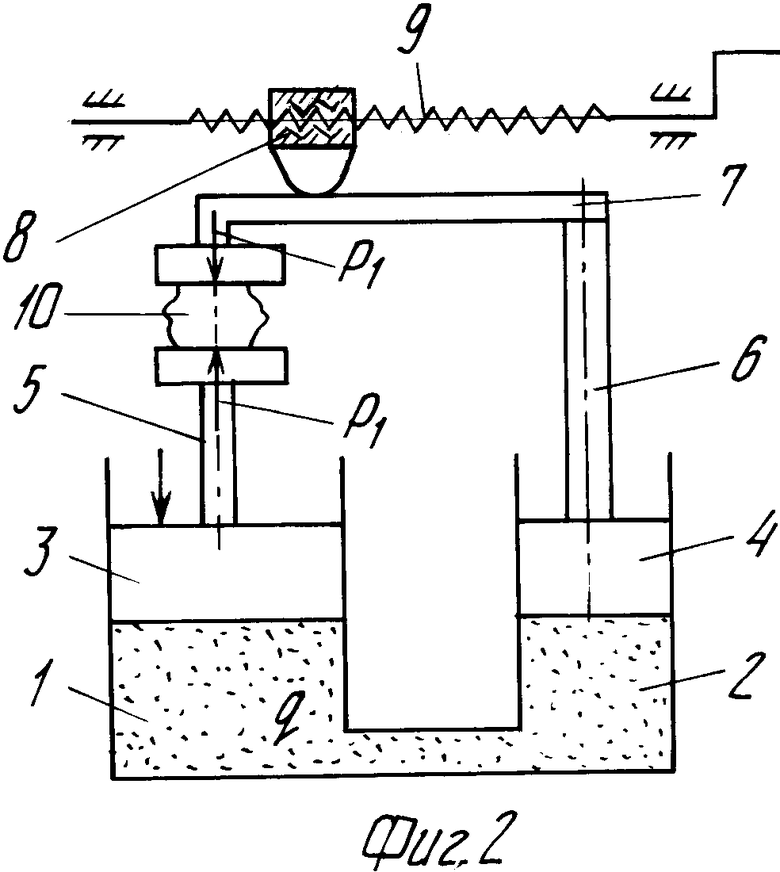
На фиг. 1 изображена схема гидромеханического преобразователя усилия; на фиг. 2 - вариант его технического использования.
Предлагаемый преобразователь состоит из сообщающихся гидроцилиндров: силового гидроцилиндра 1 и гидроцилиндра 2, поршней 3, 4 со штоками 5 и 6, рычага 7, подвижной опоры 8. Подвижная опора может быть выполнена за одно целое с гайкой, взаимодействующей с винтом 9. Под силовым гидроцилиндром понимают гидроцилиндр, одна из полостей которого сообщена с источником питания. Под источником питания понимается, например, гидронасосная станция, от которой подается рабочая жидкость под давлением, создающим силу F.
Гидромеханический преобразователь усилия работает следующим образом. Под действием внешней силы F поршень 3 силового гидроцилиндра 1, площадь поперечного сечения которого S1, будет воздействовать на жидкость и создавать в ней давление q. Это давление будет воздействовать на поршень 4 с площадью сечения S2, который через шток 6 создает усилие на рычаг 7, а последний замкнет механическую систему воздействия на шток 5. В местах контакта рычага 7 со штоками 5 и 6 возникнут усилия P1 и P2, соответственно. Из равновесия поршня 3 под действием приложенных сил получим P1 + F = q • S1, из равновесия поршня 4 следует, что P2 = q • S2, а из равновесия рычага 7 относительно опоры 8 найдем, что P1l1 = P2l2.
Полученные уравнения сводятся в систему .
.
Решим эту систему относительно P1 и P2 ,
,
т.е. 
и окончательно для P1 найдем ,
,
соответственно для P2 получим .
.
Коэффициентами усиления в формулах (2) и (3) будут \\6  .
.
Изменение коэффициентов усиления достигается смещением винтом 9 (фиг. 1) опоры, то есть изменением расстояния l1 и l2 что невозможно выполнить в прототипе.
Рассмотрим случай, когда S1 > S2 и l2 > l1. При этих условиях максимальным усилием будет усилие P1, так как l2 > l1 и l2 в формуле (2) находится в числителе. Поделим числитель и знаменатель в (2) на l2, тогда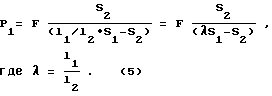 .
.
Согласно (5) при заданных конкретных значениях S1 и S2 величину усилия P1 можно получить изменяя λ путем движения опоры 8. Причем это усилие может достигать значений теоретически бесконечных. Это возникнет тогда, когда значение  , где знак → означает "стремится к значению".
, где знак → означает "стремится к значению".
На фиг. 2 те же обозначения, что и на фиг. 1, но дополнительно показано деформируемое тело 10. Задавая усилие F на поршень 3 от источника питания, получим согласно (5) усилие P1, с которым рычаг 7 и поршень 5 будут сжимать тело 10. Смещением опоры 8 винтом 9 можно получить любое потребное усилие P1, чтобы тело 10 сдеформировалось необходимым образом.
Предлагаемый гидромеханический преобразователь имеет принципиальное отличие от прототипа, заключающееся в возможности бесступенчатого регулирования усилия воздействия.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРЕОБРАЗОВАТЕЛЬ ДАВЛЕНИЯ | 1995 |
|
RU2104157C1 |
| ВИНТОВОЙ ПРЕСС | 1996 |
|
RU2101181C1 |
| РЕДУКТОР ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ | 1994 |
|
RU2082047C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ И ЗАЩИТЫ РАБОЧЕГО ОРГАНА ГОРНОЙ МАШИНЫ | 1996 |
|
RU2098622C1 |
| ПРИВОД УГОЛЬНОЙ ПИЛЫ | 1992 |
|
RU2065044C1 |
| РЫЧАЖНЫЙ ПРЕОБРАЗОВАТЕЛЬ УСИЛИЙ | 1997 |
|
RU2123428C1 |
| ГИДРОПРИВОД ЛЕБЕДКИ | 1995 |
|
RU2085472C1 |
| РАЗЪЕМНОЕ ЗАКЛИНИВАЮЩЕЕ СОЕДИНЕНИЕ | 1996 |
|
RU2099610C1 |
| ПРЕОБРАЗОВАТЕЛЬ ДАВЛЕНИЯ ГИДРОПРЕССА | 2000 |
|
RU2191698C2 |
| ТРЕХЗВЕННОЕ ЗАКЛИНИВАЮЩЕЕ СОЕДИНЕНИЕ | 1996 |
|
RU2108492C1 |
Изобретение относится к механизмам, преобразующим силы и перемещения, и может использоваться в конструкциях гидропрессов. Гидромеханический преобразователь усилия содержит гидроцилиндры с сообщающимися между собой полостями, заполненными энергоносителем. Штоки гидроцилиндров связаны между собой с помощью рычага. Опора рычага подвижна от винтового механизма и представляет собой его ходосую гайку. Преобразователь содержит также источник питания, соединенный с надпоршневой полостью силового гидроцилиндра. 2 ил.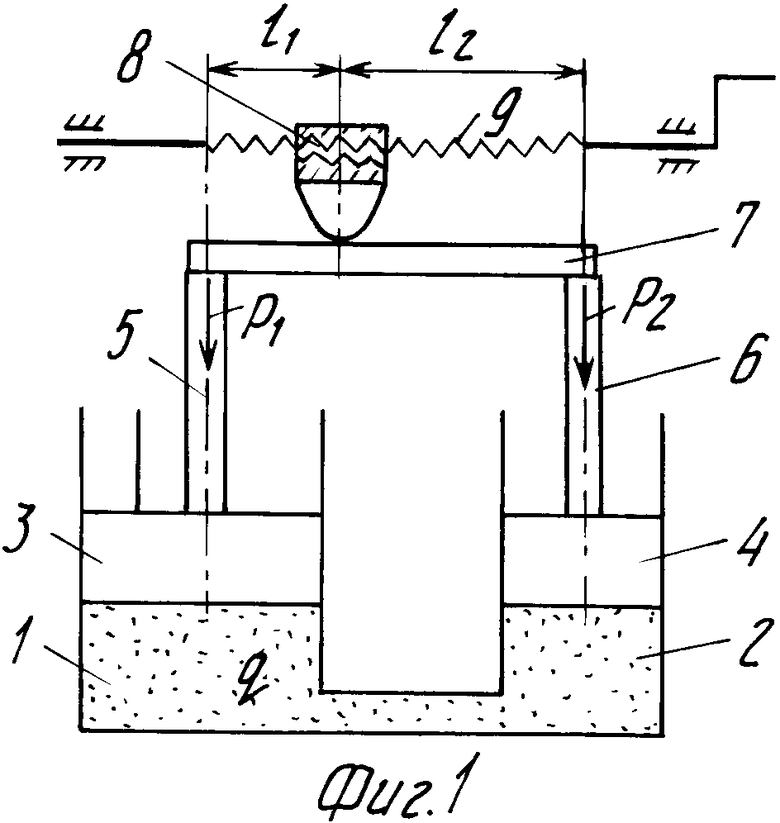
Гидромеханический преобразователь усилия, содержащий гидроцилиндры с сообщающимися между собой полостями, заполненными энергоносителем, штоки, связанные между собой с помощью рычага с подвижной от винтового механизма опорой, источник питания, соединенный с надпоршневой полостью силового гидроцилиндра, отличающийся тем, что опора рычага представляет собой ходовую гайку винтового механизма.
| SU, авторское свидетельство N 1312265, кл | |||
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
