Изобретение относится к машиностроению, а конкретнее к механизмам прессов, способных создавать большие осевые усилия с целью воздействия на объекты, размеры и форма которых должна быть изменена.
Известен пресс с приводом от спаренных угловых рычагов (см. книгу Кожевников С.Н., Есипенко Я.И., Раскин Я.М. "Механизмы", издание третье, Издательство "Машиностроение", Москва, 1965 г., стр. 162, рис. 2.294).
Преобразование усилия в этом прессе производится путем воздействия на рычаги, один из которых связан с плунжером, винтовым механизмом с двумя гайками и одним винтом. Усилие, прикладываемое к рукоятке винта, преобразуется в усилие, воздействие плунжера на обрабатываемый объект.
Недостатком такого пресса является весьма ограниченный ход рабочего звена, пространственное расположение элементов механизма, сложность центрирования деталей, обусловленная неизбежными ошибками при изготовлении резьбовых пар.
Наиболее близким механизмом к заявляемому является механизм компрессора, показанный в той же книге "Механизмы" (стр. 102, рис. 2.114). Этот компрессор, (служащий для сжатия "прессования газов), работает следующим образом: кривошип, соединенный со стойкой, т.е. с неподвижным звеном, имеет два шарнира (вращательные кинематические пары), которыми он соединяется с двумя шатунами, шатуны в свою очередь связаны шарнирами с ползунами 1 и 2. Сущность воздействия на агент заключается в том, что ползуны могут друг относительно друга сближаться и тем самым воздействовать на заключенный между ними агент (газ), сжимая его.
Описанный механизм примем за прототип.
Если повернуть кривошип на угол Δϕ, прикладывая к нему момент Mк, то будет совершена работа
Aк= MкΔϕ. (1)
При этом ползуны сдвинутся друг к другу на расстояние Δx, возникшее между ползунами усилие Fп совершит работу
Aп= FпΔx. (2).
Очевидно, что совершаемые работы Ak и Aп равны т.е. MkΔϕ = FпΔx. Представим момент Mk как
Mk = Fрr,
где Fр - усилие, прикладываемое к кривошипу на расстоянии r от центра его вращения.
Учитывая (1), (2) и (3) найдем, что:
Это отношение (K) есть коэффициент усиления, он оценивает во сколько раз сила на ползунах Fп больше прикладываемой силы Fр.
Недостатком прототипа является низкий коэффициент усиления.
Задачей изобретения является повышение коэффициента усиления, достигаемое тем, что один из ползунов преобразователя имеет жестко связанную с ним направляющую, образующую с дополнительным ползуном поступательную кинематическую пару, при этом дополнительный ползун связан шатуном со вторым ползуном механизма, а объект прессования устанавливается между первым и дополнительным ползунами.
Сущность изобретения показана на фиг. 1, на фиг. 2 показана схема, относительного движения звеньев. Рычажный преобразователь давления состоит из кривошипа 1, выполненного в виде треугольника и соединенного во вращательные кинематические пары с шатунами 2 и 3, которые в свою очередь входят во вращательные пары с первым и вторым ползунами 4 и 5. К ползуну 4 жестко присоединена направляющая 6, которая с дополнительным ползуном 7 образует поступательную кинематическую пару, а второй ползун 5 соединен с ползуном 7 шатуном 8 с двумя шарнирами. Между первым ползуном 4 и дополнительным ползуном 7 установлен объект прессования 9.
Механизм работает следующим образом: при повороте кривошипа 1 на угол Δϕ смещаются ползуны 4 и 5 (сближаются) при этом дополнительный ползун 7 сместится по направляющей 6 к ползуну 4 на расстояние Δy, Момент Mk, приложенный к кривошипу 1, умноженный на угол поворота Δϕ, даст работу AMk= MkΔϕ. Эта работа будет реализована смещением дополнительного ползуна 7 по направлению к ползуну 4 при этом возникает сила.

Параметры механизма подбираются так, что сближение ползунов 4 и 5 принимается малым по отношению к ходу каждого из ползунов, а смешение Δy получает значение второго порядка малости, в результате чего между ползунами 4 и 7 может быть получено усилие Q сколь-угодно большое. Известно, что смещение ползуна кривошипно-ползунного механизма можно найти по формуле (см. учебник "Теория механизмов и машин" под редакцией К.В. Фролова, Москва "Высшая школа", 1987 г. , рис. 11.2, стр. 310, 3-я строка снизу, формула (11.3)).
Для ползуна 5:
для ползуна 6:
Тогда сближение ползунов 4 и 5 будет Δx = h5 - h4, что при определенном подборе длин звеньев может дать величину первого порядка малости. Смещение Δy дополнительного ползуна 7 по отношению к первому ползуну 4 (фиг. 2,a) определится графически (фиг. 2,b). Линия, соединяющая концы отрезков Δx и Δy, перпендикулярна шатуну 8, изменение значения Δy по отношению к Δx будет тем меньше, чем больше наклон шатуна 8 к оси X. В том случае, когда шарнир 8 стремится занять вертикальное положение, Δy будет стремиться к нулю, что обеспечит сколь угодно большое усилие на объект прессования.
Рычажный преобразователь усилий работает следующим образом. В положении, когда первый и второй ползуны удалены от оси вращения кривошипа в правое крайнее положение, между первым и дополнительным ползунами устанавливается объект прессования. По мере приближения ползунов к оси вращения кривошипа (к началу координат на фиг. 1) дополнительный ползун 7, смещаясь по направляющей 6 к первому ползуну 4, воздействует на объект прессования, изменяя его размеры. После деформации объекта прессования, дополнительный ползун 7 вновь отходит от ползуна 4 и объект прессования может быть удален. Между местом установки объекта прессования и местом его удаления существует дистанция, что позволяет считать предложенный преобразователь усилий одновременно и транспортирующим устройством.
| название | год | авторы | номер документа |
|---|---|---|---|
| БУРОВОЙ АГРЕГАТ ДЛЯ СТРОЧНОГО БУРЕНИЯ ШПУРОВ | 1997 |
|
RU2130545C1 |
| РЕДУКТОР ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ | 1994 |
|
RU2082047C1 |
| ВИНТОВОЙ ПРЕСС | 1996 |
|
RU2101181C1 |
| БУРОВОЙ МАНИПУЛЯТОР | 1994 |
|
RU2083820C1 |
| ТРЕХЗВЕННОЕ ЗАКЛИНИВАЮЩЕЕ СОЕДИНЕНИЕ | 1996 |
|
RU2108492C1 |
| СПОСОБ РЕЗКИ ПРОКАТНЫХ ЗАГОТОВОК | 1996 |
|
RU2105641C1 |
| ДВУХКОНТАКТНАЯ КИНЕМАТИЧЕСКАЯ ПАРА | 1996 |
|
RU2098701C1 |
| РАЗЪЕМНОЕ ЗАКЛИНИВАЮЩЕЕ СОЕДИНЕНИЕ | 1996 |
|
RU2099610C1 |
| ГИДРОМЕХАНИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ УСИЛИЯ | 1996 |
|
RU2106542C1 |
| ПРЕОБРАЗОВАТЕЛЬ ДАВЛЕНИЯ | 1995 |
|
RU2104157C1 |

Изобретение относится к машиностроению, в частности к механизмам прессов, способных создавать большие осевые усилия для воздействия на объекты, размеры и формы которых должны быть изменены. Технической задачей изобретения является повышение коэффициента усиления. Преобразователь содержит кривошип, выполненный в виде треугольника, два шатуна и два ползуна, имеющих возможность движения в параллельных направляющих, дополнительный ползун, образующий с жестко соединенной с одним из ползунов направляющей поступательную кинематическую пару и связанный шатуном со вторым ползуном, при этом первый и дополнительный ползуны являются опорами для помещения между ними объекта прессования. 2 ил.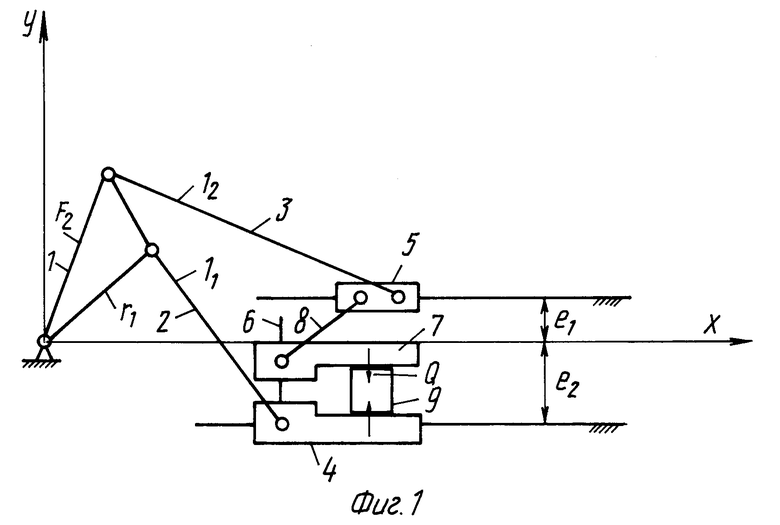
Рычажный преобразователь усилий, содержащий кривошип, выполненный в виде треугольника, два шатуна и два ползуна, выполненных с возможностью перемещения в параллельных направляющих, отличающийся тем, что он снабжен дополнительным ползуном и шатуном, один из ползунов выполнен с жестко соединенной с ним направляющей, а дополнительный ползун образует с этой направляющей поступательную кинематическую пару и связан дополнительным шатуном со вторым ползуном преобразователя, при этом первый и дополнительный ползуны являются опорами для помещения между ними объекта прессования.
| Кожевников С.Н | |||
| и др | |||
| Механизмы | |||
| - М.: Машиностроение, 1965, с | |||
| Транспортер для перевозки товарных вагонов по трамвайным путям | 1919 |
|
SU102A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Там же, с | |||
| Деревянное стыковое скрепление | 1920 |
|
SU162A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Артоболевский И.М | |||
| Механизм | |||
| - М.-Л.: издательство АН СССР, 1948, с | |||
| Прибор для корчевания пней | 1921 |
|
SU237A1 |
| SU 1573769 A1, 23.06.90 | |||
| Кривошипно-рычажный исполнительный механизм привода вытяжного ползуна пресса | 1977 |
|
SU664843A1 |
