Изобретение относится к области радиолокации.
Известен частотно-модулированный высотомер, работающий по принципу выделения и обработки разностной частоты преобразованного сигнала, образующегося при взаимодействии прямого сигнала передатчика, непрерывно излучаемого к земной поверхности и отраженного эхо-сигнала [1]. Неизменные параметры модуляции, в частности, постоянная скорость перестройки частоты сигнала передатчика в диапазоне измеряемых высот, требуют достаточно широкой полосы пропускания приемника при обработке преобразованного сигнала, что снижает помехозащищенность такого высотомера.
Недостатком данного высотомера является ухудшение достоверности выходной информации (измеряемой высоты) при действии помех.
Наиболее близким к изобретению по совокупности признаков является частотно-модулированный высотомер, содержащий последовательно соединенные источник опорного аналогового сигнала, блок управления скоростью перестройки частоты передатчика, генератор пилообразных колебаний, передатчик и передающую антенну, последовательно соединенные блок формирования измерительного интервала полосы модуляции и блок переключения направления перестройки частоты передатчика, выход которого соединен с вторым входом генератора пилообразных колебаний, последовательно соединенные приемную антенну, смеситель, усилитель преобразованного сигнала и цифровой релейный элемент, первый выход которого соединен с вторым входом блока управления скоростью перестройки частоты передатчика, генератор тактовых импульсов и преобразователь временной интервал-код (счетчик-вычислитель), при этом второй и третий выходы передатчика соединены соответственно с вторым входом смесителя и входом блока формирования измерительного интервала полосы модуляции, второй выход которого соединен с первым входом преобразователя временной интервал-код, первый выход генератора тактовых импульсов соединен с вторым входом цифрового релейного элемента, второй выход соединен с вторым входом блока формирования измерительного интервала полосы модуляции, третий выход соединен с вторым входом преобразователя временной интервал-код, третий вход которого соединен с выходом усилителя преобразованного сигнала, третий вход блока управления скоростью перестройки частоты передатчика соединен с выходом преобразователя временной интервал-код, четвертый вход соединен с вторым (знаковым) выходом цифрового релейного элемента [2].
Однако известное устройство характеризуется недостаточной достоверностью выходной информации при действии уводящих по дальности помех. Применительно к известному устройству к такому виду помехи относится помеха типа "несущая, амплитудно-модулированная частотой настройки приемника". Огибающая этой помехи с частотой настройки приемника выделяется на выходе смесителя за счет эффекта прямого детектирования. Такую помеху может создавать, например, импульсный высотомер, работающий в одном и том же диапазоне частот и имеющий частоту повторения излучаемых импульсов, близкую к частоте настройки приемника. Так, например, если частота Fп помехи превышает среднюю частоту Fo полосы пропускания усилителя преобразованного сигнала, код высоты на выходе преобразователя временной интервал-код увеличивается по сравнению с кодом высоты до момента действия помехи, при этом скорость изменения частоты передатчика уменьшается, а измерительный интервал полосы модуляции увеличивается, что приводит к дальнейшему увеличению кода высоты под действием помехи, и так далее до достижения им максимального значения. Цифровой релейный элемент на знаковом выходе формирует сигнал, под действием которого также происходит увеличение кода высоты. И, наоборот, помеха с частотой Fп, которая меньше средней частоты Fo, воздействуя на преобразователь временной интервал-код и цифровой релейный элемент, производит уменьшение кода высоты до достижения им минимального значения. Скорость изменения выходных показаний высотомера при действии помехи прямо пропорциональна величине расстройки частоты Fп от частоты Fo в пределах полосы пропускания приемника.
Цель изобретения - увеличение достоверности выходной информации при действии уводящей по дальности помехи.
Для этого в частотно-модулированный высотомер, содержащий последовательно соединенные источник опорного аналогового сигнала, блок управления скоростью перестройки частоты передатчика, генератор пилообразных колебаний, передатчик и передающую антенну, последовательно соединенные блок формирования измерительного интервала полосы модуляции и блок переключения направления перестройки частоты передатчика, выход которого соединен с вторым входом генератора пилообразных колебаний, последовательно соединенные приемную антенну, смеситель, усилитель преобразованного сигнала и цифровой релейный элемент, первый выход которого соединен с вторым входом блока управления скорость перестройки частоты передатчика, генератор тактовых импульсов и преобразователь временной интервал-код, при этом второй и третий выходы передатчика соединены соответственно с вторым входом смесителя и входом блока формирования измерительного интервала полосы модуляции, второй выход которого соединен с первым входом преобразователя временной интервал-код, выход генератора тактовых импульсов соединен с вторым входом цифрового релейного элемента, введены генератор прямоугольных колебаний, первый блок задержки, последовательно соединенные первый сумматор по модулю два, второй сумматор по модулю два и первый элемент И, последовательно соединенные первый ключ, первый накопитель и первое пороговое устройство, последовательно соединенные второй ключ, второй накопитель и второе пороговое устройство, второй элемент И, входы которого соединены с выходами пороговых устройств, второй блок задержки, включенная между вторым выходом блока формирования измерительного интервала полосы модуляции и третьим входом цифрового релейного элемента, первый выход которого соединен с первыми входами ключей, второй выход соединен с вторыми входами накопителей, третий и четвертый выходы соединены с входами первого сумматора по модулю два, выход генератора прямоугольных колебаний соединен с третьим входом генератора пилообразных колебаний, с вторым входом преобразователя временной интервал-код и с входом первого блока задержки, выход которого соединен с вторым входом второго сумматора по модулю два и с вторыми входами ключей, выход второго элемента И соединен с вторым входом первого элемента И и с третьим входом блока управления скоростью перестройки частоты передатчика, четвертый вход которого соединен с выходом первого элемента И.
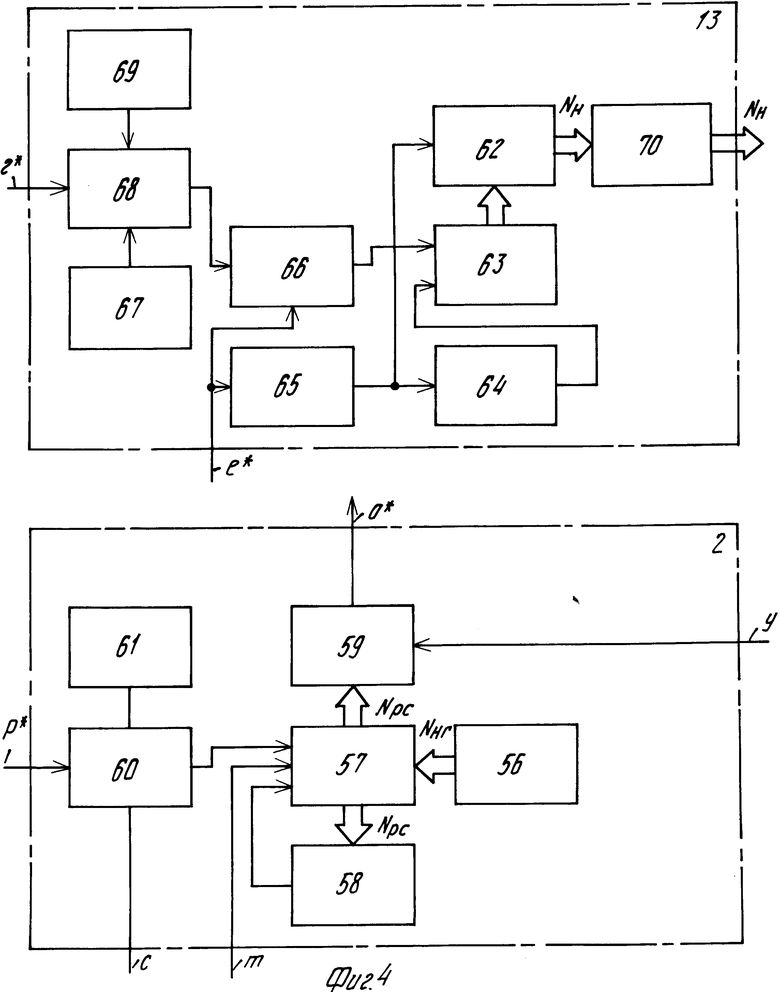
На фиг. 1 изображена структурная электрическая схема предложенного высотомера; на фиг. 2 - вариант реализации генератора пилообразных колебаний, блока переключения направления перестройки частоты передатчика, блока формирования измерительного интервала полосы модуляции; на фиг. 3 - вариант реализации цифрового релейного элемента; на фиг. 4 - вариант реализации блока управления скоростью перестройки частоты передатчика и преобразователя временной интервал-код; на фиг. 5, 6, 7, 8 - эпюры и временные диаграммы, поясняющие работу высотомера.
Высотомер (фиг. 1) содержит источник 1 опорного аналогового сигнала, блок 2 управления скоростью перестройки частоты передатчика, генератор 3 пилообразных колебаний, передатчик 4, передающую антенну 5, блок 6 формирования измерительного интервала полосы модуляции, блок 7 переключения направления перестройки частоты передатчика, приемную антенну 8, смеситель 9, усилитель 10 преобразованного сигнала, цифровой релейный элемент 11, генератор 12 тактовых импульсов, преобразователь 13 временной интервал-код, генератор 14 прямоугольных колебаний, первый блок 15 задержки, первый сумматор 16 по модулю два, второй сумматор 17 по модулю два, первый элемент И 18, первый ключ 19, первый накопитель 20, первое пороговое устройство 21, второй ключ 22, второй накопитель 23, второе пороговое устройство 24, второй И 25, второй блок 26 задержки.
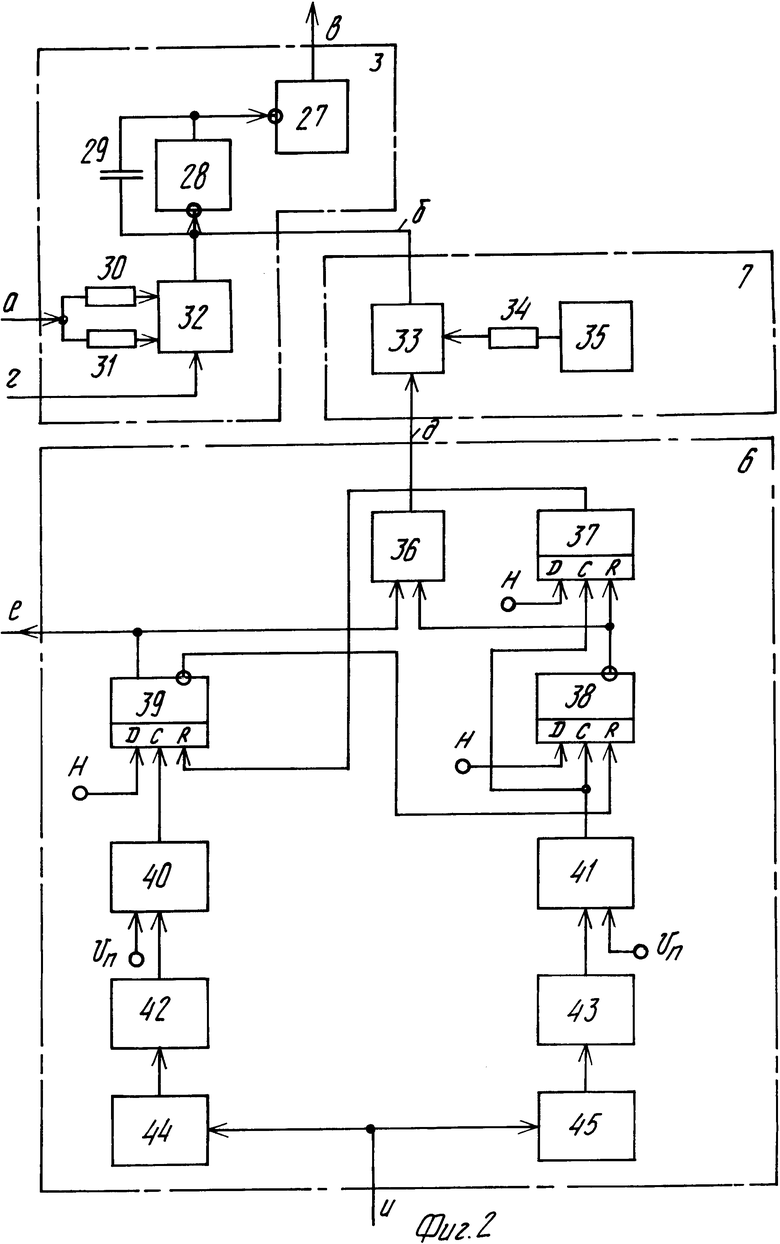
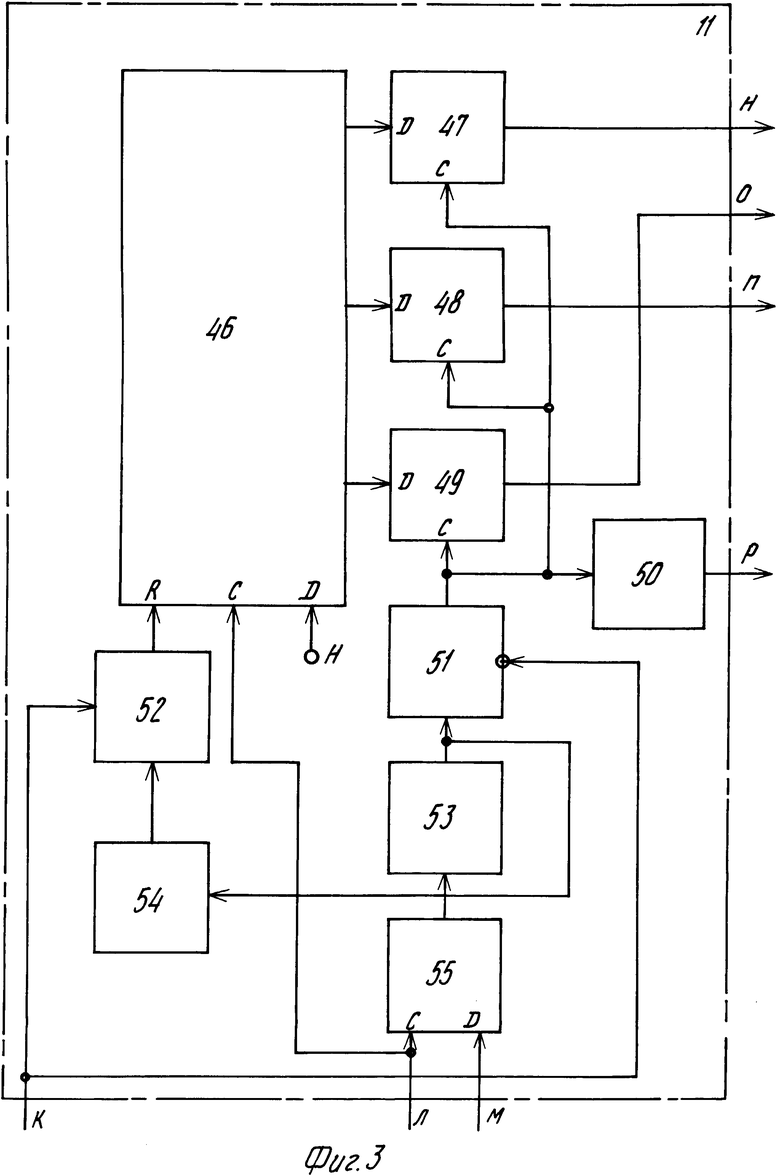
Генератор 3 пилообразных колебаний (фиг. 2) содержит усилитель 27, усилитель 28, конденсатор 29, резистор 30, резистор 31, переключатель 32. Блок 7 переключения направления перестройки частоты передатчика (фиг. 2) содержит ключ 33, резистор 34, источник 35 напряжения. Блок 5 формирования измерительного интервала полосы модуляции (фиг. 2) содержит схему И 36, триггер 37, триггер 38, триггер 39, компаратор 40, компаратор 41, детектор 42, детектор 43, СВЧ-резонатор 44, СВЧ-резонатор 45. Цифровой релейный элемент 11 (фиг. 3) содержит сдвиговый регистр 46, триггер 47, триггер 48, триггер 49, схему 50 задержки, схему И 51, схему ИЛИ 52, схему 53 выделения фронта импульса, схему 54 задержки, триггер 55. Блок 2 управления скоростью перестройки частоты передатчика (фиг. 4) содержит источник 56 двоичного числа, реверсивный счетчик 57, дешифратор 58, цифроаналоговый преобразователь 59, переключатель 60, генератор 61 тактовых импульсов. Преобразователь 13 временной интервал-код (фиг. 4) содержит регистр 62, счетчик 63, схему 64 задержки, схему 65 выделения фронта импульса, схему И 66, генератор 67 тактовых импульсов, переключатель 68, генератор 69 тактовых импульсов, схему 70 усреднения.
Высотомер работает следующим образом.
При включении высотомера он работает в режиме поиска. Для этого в реверсивный счетчик 57 из состава блока 2 управления скоростью перестройки частоты передатчика заносится двоичное число (код) Nнг, которое формируется на выходе источника 56 двоичного числа и определяет нижнюю границу диапазона поиска по высоте. На выходе схемы И 25 сформирован логический уровень L ("логический 0"), поэтому на выходе элемента И 18 данное логическое состояние повторяется. Выход элемента И 18 соединен с входом управления счетом "Больше/меньше" реверсивного счетчика 57, на данном входе состояние "логическая 1" увеличивает содержимое счетчика, состояние "логический 0" уменьшает содержимое счетчика. Одновременно состояние "логический 0" на выходе элемента И 25 устанавливает переключатель 60 в положение, когда к тактовому входу реверсивного счетчика 57 подключен выход генератора 61 тактовых импульсов. Под действием тактовых импульсов код Nрс на выходе реверсивного счетчика 57 уменьшается от значения Nнг до значения Nвг, которое определяет верхнюю границу диапазона поиска по высоте. Выход дешифратора 58 соединен с входом разрешения параллельной загрузки реверсивного счетчика 57. При выполнении условия Nрс≤Nвг дешифратор 58 формирует на своем выходе логический уровень H ("логическую 1"), под действием которого в реверсивный счетчик 57 снова заносится двоичный код Nнг и процесс поиска повторяется вновь. Выходной код Nрс поступает на первый вход цифро-аналогового преобразователя 59 на второй вход которого подается опорное напряжение Uo, которое вырабатывает источник 1 аналогового сигнала. Чем больше значение Nрс, тем больше значение напряжения Uупр на выходе цифроаналогового преобразователя 59 и наоборот, чем меньше значение Nрс, тем меньше значение Uупр. В процессе поиска напряжения Uупр периодически изменяется от максимального значения Uупрмакс до минимального значения Uупрмин.
При необходимости для поддержания соответствующего коэффициента передачи следящего кольца высотомера в диапазоне измеряемых высот управляющее напряжение может подвергаться нелинейному преобразованию (экспоненциальному, гиперболическому).
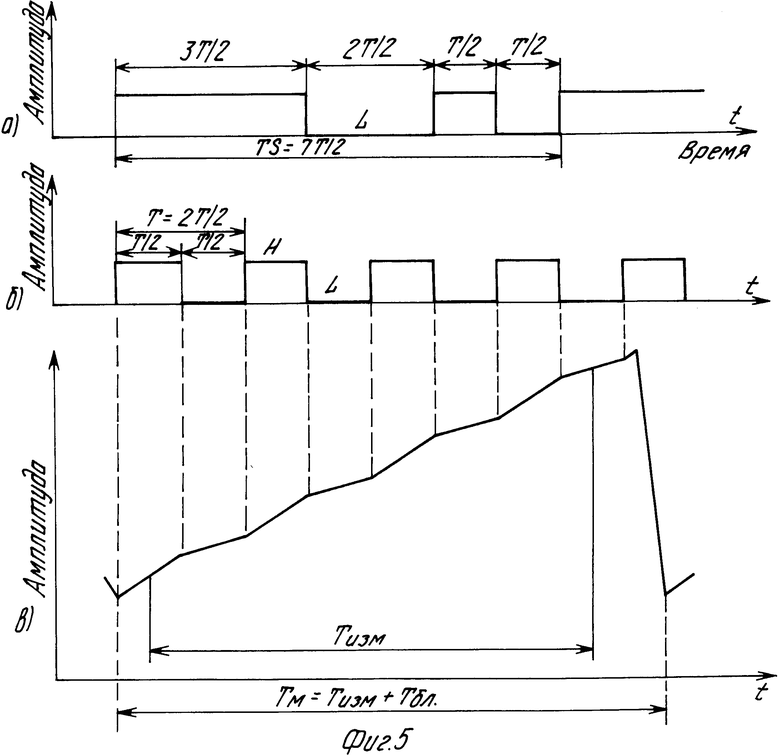
Управляющее напряжение с выхода блока 2 управления скоростью перестройки частоты передатчика поступает на первый вход генератора 3 пилообразных колебаний, на второй вход которого подается выходной сигнал генератора 14 прямоугольных колебаний. Генератор 14 формирует периодическое симметричное прямоугольное колебание (фиг. 5б), так называемый меандр. В этом случае он содержит последовательно соединенные генератор тактовых импульсов и делитель частоты. Генератор 14 может так же формировать и более сложное периодическое прямоугольное колебание, например, M - последовательность (фиг. 5а). На фиг. 5а представлена самая короткая, семиэлементная M - последовательность. Схемы формирования M - последовательностей известны (см. Шумоподобные сигналы в системах передачи информации, - под ред. В.Б. Пестрякова, М.: Сов. радио, 1973, с. 1450150). Применение меандра или M - последовательности не изменяет сущности изобретения. Вместе с тем при использовании M - последовательности для увеличения симметрии сигнала целесообразно увеличивать ее длину так, чтобы отношение числа "логических 1" к числу "логических 0" на периоде Ts было достаточно близким к единице. Для правильной работы предполагаемого устройства необходимо соблюдать условия
где
τнмакс - время задержки сигнала, соответствующее максимальной измеряемой высоте. Выходной сигнал генератора 14 управляет переключателем 32, который входит в состав генератора 3 пилообразных колебаний (фиг. 2). Если состояние выходящего сигнала генератора 14 соответствует "логической 1", то управляющее напряжение U упр подается на вход усилителя 28 через резистор 30, номинальной значение которого равно R1, в состоянии "логический 0" - через резистор 31, номинальное значение которого равно R0. Резисторы 30, 31, усилитель 28 и конденсатор 29 с номинальным значением емкости С образуют интегратор с переменной времени интегрирования:
τ
τ
Пилообразное, модулированное меандром напряжение с периодом повторения Tм с выхода генератора пилообразных колебаний поступает на вход передатчика 4 (фиг. 5в). Среднее значение скорости нарастания пилообразного напряжения прямо пропорционально значению Uупр, а значение периода Tм обратно пропорционально.
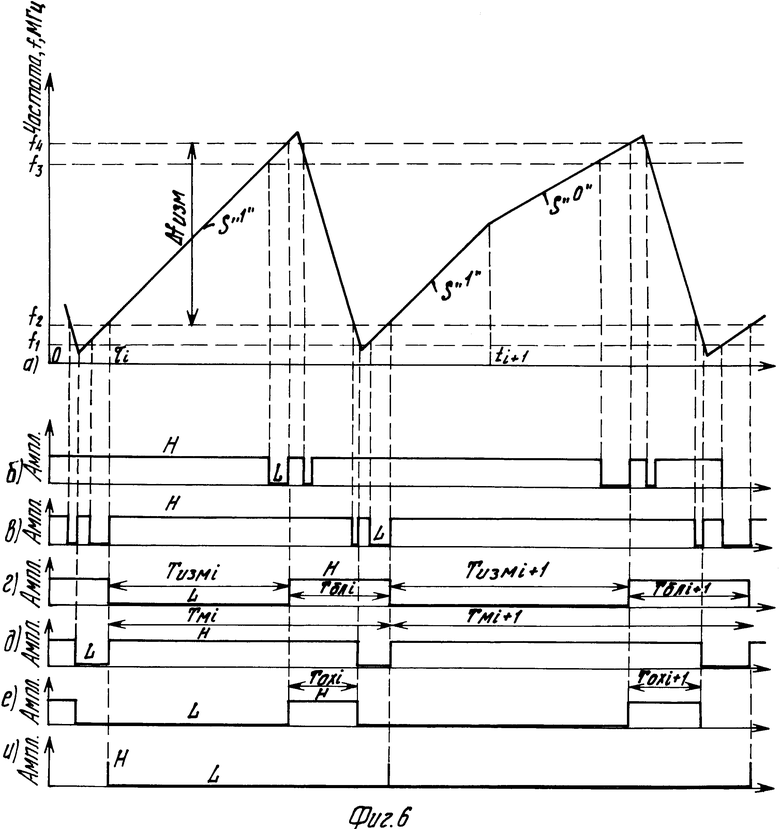
Работа блока 6 формирования измерительного интервала полосы модуляции, блока 7 переключения направления перестройки частоты передатчика, генератора 3 пилообразных колебаний (фиг. 2) и передатчика 4 поясняется временными диаграммами, представленными на фиг. 6. На фиг. 6а представлена временная диаграмма перестройки частоты передатчика 4, где значение частот f1, f2 соответствуют моментам срабатывания компаратора 41 (фиг. 6в), значения частот f3, f4 соответствуют моментам срабатывания компаратора 40 (фиг. 6б), значение Δfизм обозначает измерительную (эталонную) полосу перестройки частоты передатчика в диапазоне частот от f2 до f4. Время, в течение которого частота передатчика 4 перестраивается в полосе Δfизм, соответствует измерительному интервалу Tизмi полосы модуляции, который формируется в виде логического уровня L ("логического 0") на выходе триггера 39 (фиг. 6г). На интервале времени от ti до ti+1 скорость S"1" перестройки частоты передатчика 4 соответствует состоянию H на выходе генератора 14 прямоугольных колебаний, на интервале времени более ti+1 - состоянию L, при этом скорость перестройки частоты передатчика 4 принимает значение S"0", вместе с тем значения S"1" и S"0" зависят от управляющего напряжения Uупр, чем больше значение Uупр, тем больше S"1" и S"0" и наоборот. На фиг. 6д представлена осциллограмма сигнала на выходе триггера 38, на фиг. 6е представлена осциллограмма сигнала на выходе схемы И 36, на фиг. 6и представлена осциллограмма сигнала на выходе триггера 37. Выходной сигнал схемы И 36 уровня H длительностью Toxi открывает ключ 33 и подключает источник напряжения 35, полярность которого противоположна полярности управляющего напряжения Uупр, через резистор 34 к входу усилителя 28, при этом скорость изменения выходного напряжения генератора 3 пилообразных колебаний меняет знак и увеличивает свое значение, соответственно на время Toxi переключается направление перестройки частоты передатчика 4 и увеличивается скорость перестройки. Соотношение между Tизмi и Toxi определяется выбором параметров, в предлагаемом изобретении для модуляции частоты передатчика 4 используется несимметричное пилообразное колебание.
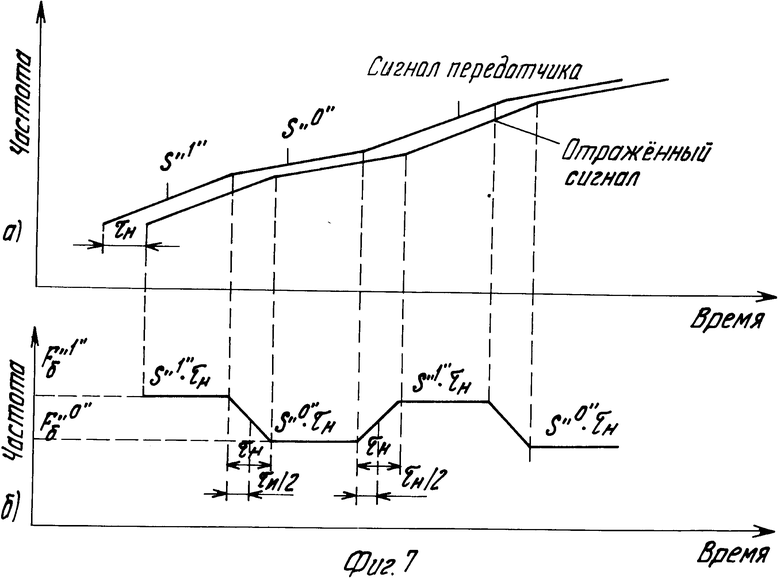
При перестройке генератором 3 частоты передатчика 4 смеситель 9 выделяет преобразованный сигнал разностной частоты между сигналом, который непосредственно поступает от передатчика 4 и сигналом, который проходит путь: передатчик 4 - передающая антенна 5 - земная поверхность - приемная антенна 8 - смеситель 9 (фиг. 7а).
Значение мгновенной частоты F преобразованного сигнала (фиг. 7б) определяется следующими выражениями:
преобразованного сигнала (фиг. 7б) определяется следующими выражениями:
T
F
T
где
F
F
τн - время задержки отраженного от земной поверхности сигнала относительно сигнала передатчика.
Отношение значения S"1" и S"0" всегда постоянно:
При определенном значении управляющего напряжения Uупр частота преобразованного сигнала попадает в полосу пропускания усилителя 10. Выходной сигнал смесителя 9 усиливается усилителем 10 преобразованного сигнала, средняя частота полосы пропускания которого равна Fо и нормируется по амплитуде, например, с помощью компаратора. Выходной сигнал компаратора принимает значение H, когда амплитуда преобразованного сигнала превышает порог срабатывания компаратора и значение L, когда амплитуда преобразованного сигнала ниже порога срабатывания компаратора. Выходной сигнал усилителя 10 поступает на первый вход цифрового релейного элемента 11, на второй вход которого подается сигнал с выхода генератора 12 тактовых импульсов. На третий вход цифрового релейного элемента через блок 26 задержки подается выходной сигнал блока 6 формирования измерительного интервала полосы модуляции (фиг. 6г), время задержки в блоке 26 компенсирует время τaп аппаратурной задержки преобразованного сигнала в усилителе 10. Генератор 12 тактовых импульсов формирует эталонные метки времени, необходимые для определения мгновенного значения периода преобразованного сигнала. Одна из возможных схем выполнения цифрового релейного элемента представлена на фиг. 3. Здесь триггер 55 служит для синхронизации начала и окончания мгновенного периода преобразованного сигнала эталонными и метками времени, период повторения эталонных меток времени намного меньше минимального возможного мгновенного периода преобразованного сигнала. С помощью эталонных меток времени, поступающих на вход C, сдвиговый регистр 46 осуществляет периодический сдвиг "логической 1", поступающей на его вход Д. Чем больше значение мгновенного периода преобразованного сигнала, тем дальше продвинется в сдвиговом регистре 46 "логическая 1" и наоборот.
С начала каждого нового мгновенного периода преобразованного сигнала на выходе схемы 53 выделяется короткий импульс, с помощью которого выходная информация сдвигового регистра 46 о предыдущем мгновенном периоде преобразованного сигнала заносится в элементы памяти - триггеры 47, 48, 49. Схема И 51 открыта только на время Tизм, на время Tбл она закрыта (фиг. 6г). Затем выходной импульс схемы 53 через схему 54 задержки и схему ИЛИ 52 обнуляет содержимое сдвигового регистра 46 и процесс повторяется. Содержимое сдвигового регистра 46 обнуляется также на время Tбл при поступлении через схему ИЛИ 52 на его вход R сигнала с выхода схемы 26 задержки. После занесения выходной информации сдвигового регистра 46 в триггеры 47, 48, 49, счетные импульсы, период повторения которых равен мгновенному периоду преобразованного сигнала биений с выхода схемы 50 задержки (фиг. 3) поступает на первые входы ключей 19, 22 и второй вход блока 2 управления скоростью перестройки частоты передатчика (фиг. 1).
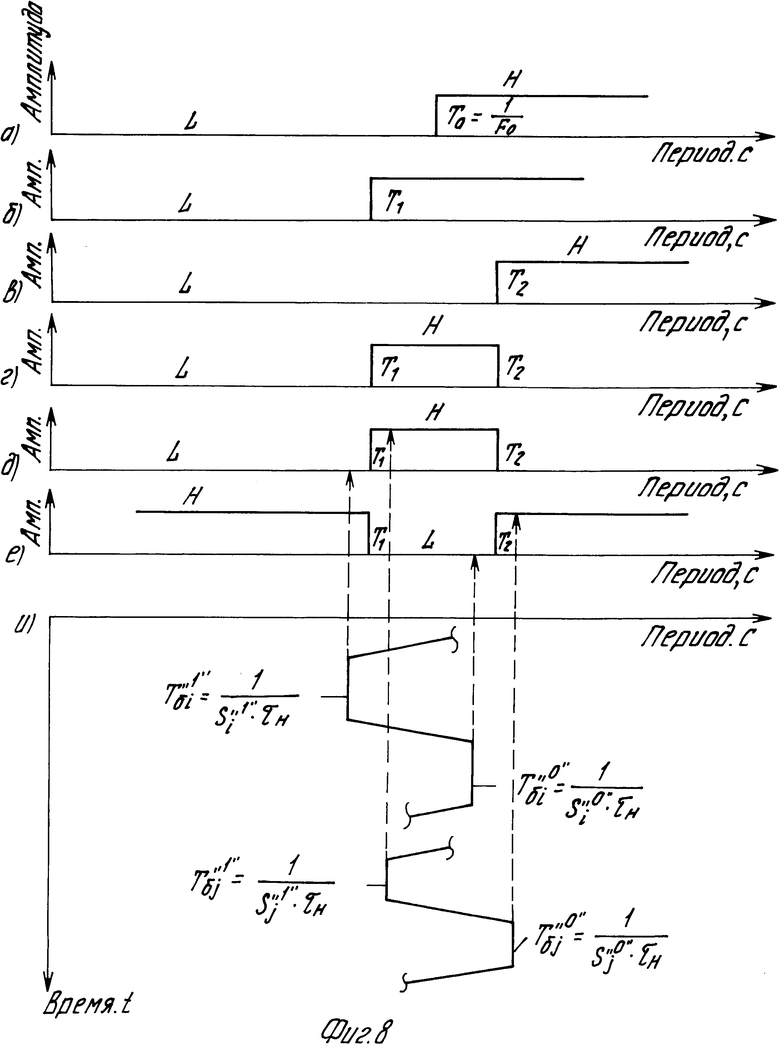
На фиг. 8а, 8б, 8в представлены осциллограммы соответственно на выходе триггера 48, переключающегося из состояния "логический 0" в состояние "логический 1", если значение мгновенного периода преобразованного сигнала более или равно  выходе триггера 49, переключающегося из состояния "логический 0" в состояние "логическая 1", если значение мгновенного периода преобразованного сигнала более или равно T1, выходе триггера 47, переключающегося из состояния "логический 0" в состояние "логическая 1", если значение мгновенного периода преобразованного сигнала более или равно T2, при этом:
выходе триггера 49, переключающегося из состояния "логический 0" в состояние "логическая 1", если значение мгновенного периода преобразованного сигнала более или равно T1, выходе триггера 47, переключающегося из состояния "логический 0" в состояние "логическая 1", если значение мгновенного периода преобразованного сигнала более или равно T2, при этом:
Выходные сигналы триггера 47, 49 поступают на входы сумматора 16 по модулю два.
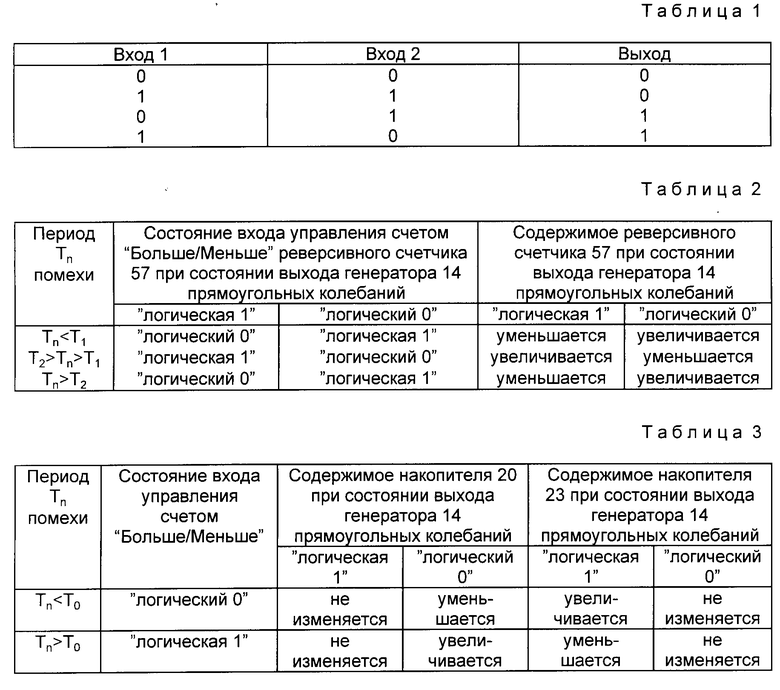
Табл. 1 истинности сумматора по модулю два приводится ниже.
На фиг. 8г представлено состояние выходного сигнала сумматора 16 по модулю два в зависимости от значения мгновенного периода преобразованного сигнала. Выходной сигнал сумматора 16 поступает на первый вход сумматора 17 по модулю два, на второй вход которого подаются выходные колебания генератора 14, задержанные и проинвектированные в схеме 15 задержки. Время τз задержки в схеме 15 составляет:
где
τнмакс - время задержки, соответствующее максимальной измеряемой высоте.
На фиг. 8д представлено состояние выходного сигнала сумматора 17 по модулю два в зависимости от значения мгновенного периода преобразованного сигнала при наличии на выходе генератора 14 состояния "логическая 1" (на выходе блока 15 задержки состояние "логический 0"), на фиг. 8е) представлено состояние выходного сигнала сумматора 17 по модулю два в зависимости от значения мгновенного периода преобразованного сигнала при наличии на выходе генератора 14 состояния "логический 0" (на выходе блока 15 задержки состояние "логическая 1"), на фиг. 8и) представлены мгновенные значения обрабатываемых периодов T
Ключи 19, 22 управляются выходным сигналом схемы 15 задержки и работают в противофазе: состояние "логическая 1" открывает ключ 19 и счетные импульсы поступают на тактовый вход накопителя 20, ключ 22 закрыт, состояние "логический 0" открывает ключ 22 и счетные импульсы поступают на тактовый вход накопителя 23, ключ 19 закрыт. Накопители 20, 23 могут быть выполнены, например на реверсивных счетчиках. На вход управления счетом "Больше/меньше" накопителей 20, 23 подается выходной сигнал цифрового релейного элемента 11 (фиг. 8а), при этом управление счетом осуществляется противофазно: состояние "логический 0" приводит к увеличению содержимого накопителя 23 и уменьшает содержимое накопителя 20, состояние "логическая 1" приводит к увеличению содержимого накопителя 20 и уменьшает содержимое накопителя 23.
При обработке преобразованного сигнала содержимое накопителей 20, 23 увеличивается и достигает порогового значения Nср, при котором срабатывают пороговые устройства 21, 24. Пороговые устройства могут быть выполнены, например, в виде дешифратора двоичного кода.
При одновременном срабатывании пороговых устройств 21, 24 состояние "логический 0" на выходе элемента И 25 заменяется на состояние "логическая 1", при этом переключатель 60 блока 2 управления скоростью перестройки частоты передатчика подключает счетные импульсы с выхода цифрового релейного элемента 11 на тактовый вход реверсивного счетчика 57, элемента И 18 переключается в режим повторения выходного сигнала сумматора 17 по модулю два, который поступает на вход управления счетом "Больше/меньше" реверсивного счетчика 57. Таким образом, при одновременном срабатывании пороговых устройств 21, 24 высотомер из режима поиска переходит в режим слежения за отраженным сигналом.
Преобразованный сигнал с периодом T
T
T
Выходной сигнал блока 6 формирования измерительного интервала полосы модуляции поступает на первый вход преобразователя 13 временной интервал-код (фиг. 6г), одна из возможных схем выполнения которого представлена на фиг. 4. При измерении малых высот измерительный интервал Tизм меньше T/2, при этом:

где
T
T
Hтек - текущая высота, м;
C - скорость распространения радиоволн, м/с.
В преобразователе 13 временной интервал-код измерительный интервал T
С учетом (17):
N
В конце каждого измерительного интервала схема 65 выделения фронта импульса заносит содержимое счетчика 63 в регистр 62, затем схема 64 задержки обнуляет содержимое счетчика 63.
Код Nн высоты поступает на схему 70 усреднения, которая усредняет "n" отсчетов кода Nн высоты, при этом на выходе схемы 70 усреднения формируется сглаженное значение кода Nн высоты:
При измерении больших высот измерительный интервал Tизм во много раз больше Т/2, однако сущность работы предлагаемого устройства от этого не изменяется.
Выходная информация  считается достоверной, если элемент И 25 формирует на своем выходе сигнал ЗАХВАТ, соответствующий состоянию "логическая 1".
считается достоверной, если элемент И 25 формирует на своем выходе сигнал ЗАХВАТ, соответствующий состоянию "логическая 1".
Выходная информация  считается недостоверной, если элемент И 25 формирует на своем выходе сигнал СБРОС, соответствующий состоянию "логический 0".
считается недостоверной, если элемент И 25 формирует на своем выходе сигнал СБРОС, соответствующий состоянию "логический 0".
При действии помехи на цифровой релейный элемент 11 согласно фиг. 8 можно составить следующие таблицы истинности, табл. 2 и табл. 3.
Как следует из табл. 2, при действии помехи, насколько "логическая 1" увеличит (уменьшит) содержимое реверсивного счетчика 57, настолько "логический 0" его уменьшит (увеличит). Так как генератор 14 прямоугольных колебаний формирует симметричный сигнал, в целом содержимое реверсивного счетчика 57 не изменится, следовательно, не изменятся и выходные показания высотомера при действии уводящей по дальности помехи.
Вместе с тем, как следует из табл. 3, действие такой помехи приводит к уменьшению содержимого одного из накопителей 20, 23, при этом элемент И 25 формирует на своем выходе сигнал СБРОС.
Таким образом, в отличие от рассмотренных аналогов, при действии уводящей по дальности помехи, предлагаемый высотомер не выдает недостоверную информацию.
Применение предлагаемого частотно-модулированного высотомера позволяет увеличить достоверность выходной информации при действии уводящих по дальности помех.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЧАСТОТНО-МОДУЛИРОВАННЫЙ ВЫСОТОМЕР | 1998 |
|
RU2133483C1 |
| РАДИОЛОКАЦИОННОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ДАЛЬНОСТИ (ВАРИАНТЫ) | 1999 |
|
RU2154285C1 |
| ЧАСТОТНО-МОДУЛИРОВАННЫЙ РАДИОВЫСОТОМЕР | 2003 |
|
RU2263330C2 |
| ЧАСТОТНО-МОДУЛИРОВАННЫЙ ВЫСОТОМЕР | 2003 |
|
RU2234718C1 |
| РАДИОДАТЧИК | 1994 |
|
RU2087922C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 1995 |
|
RU2095821C1 |
| РАДИОЛОКАЦИОННЫЙ ОТВЕТЧИК | 1994 |
|
RU2096805C1 |
| ИМПУЛЬСНО-ФАЗОВЫЙ ИЗМЕРИТЕЛЬ ТОЛЩИНЫ СЛОЕВ РАЗНОРОДНЫХ ЖИДКОСТЕЙ, А ТАКЖЕ ИХ ОТНОСИТЕЛЬНОГО ИЗМЕНЕНИЯ С ПОВЫШЕННОЙ ТОЧНОСТЬЮ | 1999 |
|
RU2188399C2 |
| УСТРОЙСТВО ДЛЯ ИДЕНТИФИКАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ | 1992 |
|
RU2037846C1 |
| СПОСОБ СНИЖЕНИЯ НИЖНЕЙ ГРАНИЦЫ ИЗМЕРЕНИЯ МАЛЫХ ВЫСОТ ДО НУЛЯ И УСТРОЙСТВО КОГЕРЕНТНОГО ИМПУЛЬСНО-ДОПЛЕРОВСКОГО РАДИОВЫСОТОМЕРА, РЕАЛИЗУЮЩЕГО СПОСОБ | 2008 |
|
RU2412450C2 |
Изобретение относится к области радиолокации. Существуют некоторые виды помех, действие которых на высотомер может приводить к изменению его выходных показаний. Такие уводящие по дальности помехи снижают достоверность выходной информации высотомера. Целью изобретения является увеличение достоверности выходной информации высотомера при действии уводящих по дальности помех. Частотно-модулированный высотомер содержит последовательно соединенные источник опорного аналогового сигнала, блок управления скоростью перестройки частоты передатчика, генератор пилообразных колебаний, передатчик и передающую антенну, последовательно соединенные блок формирования измерительного интервала полосы модуляции и блок переключения направления перестройки частоты передатчика, выход которого соединен с вторым входом генератора пилообразных колебаний, последовательно соединенные приемную антенну, смеситель, усилитель преобразованного сигнала и цифровой релейный элемент, первый выход которого соединен с вторым входом блока управления скоростью перестройки частоты передатчика, генератор тактовых импульсов и преобразователь временной интервал-код, при этом второй и третий выходы передатчика соединены соответственно с вторым входом смесителя и входом блока формирования измерительного интервала полосы модуляции, второй выход которого соединен с первым входом преобразователя временной интервал-код, выход генератора тактовых импульсов соединен с вторым входом цифрового релейного элемента, генератор прямоугольных колебаний, первая схема задержки, последовательно соединенные первый сумматор по модулю два, второй сумматор по модулю два и первая схема И, последовательно соединенные первый ключ, первый накопитель и первое пороговое устройство, последовательно соединенные второй ключ, второй накопитель и второе пороговое устройство, вторая схема И, входы которой соединены с выходами пороговых устройств, вторая схема задержки, включенная между вторым выходом блока формирования измерительного интервала полосы модуляции и третьим входом цифрового релейного элемента, первый выход которого соединен с первыми входами ключей, второй выход соединен с вторыми входами накопителей, третий и четвертый выходы соединены с входами первого сумматора по модулю два, выход генератора прямоугольных колебаний соединен с третьим входом генератора пилообразных колебаний, с вторым входом преобразователя временной интервал-код и с входом первой схемы задержки, выход которой соединен с вторым входом второго сумматора по модулю два и с вторыми входами ключей, выход второй схемы И соединен с вторым входом первой схемы И и с третьим входом блока управления скоростью перестройки частоты передатчика, четвертый вход которого соединен с выходом первой схемы И. В предлагаемом высотомере выходная информация об измеряемой высоте считается достоверной, если вторая схема И формирует на своем выходе сигнал ЗАХВАТ, соответствующий состоянию "логическая 1". При действии на высотомер уводящей по дальности помехи выходная информация об измеряемой высоте не изменяется до момента снятия сигнала ЗАХВАТ. Выходная информация об измеряемой высоте считается недостоверной, если вторая схема И формирует на своем выходе сигнал СБРОС, соответствующий состоянию "логический 0". Применение предлагаемого частотно-модулированного высотомера позволяет увеличить достоверность выходной информации при действии уводящих по дальности помех. 8 ил.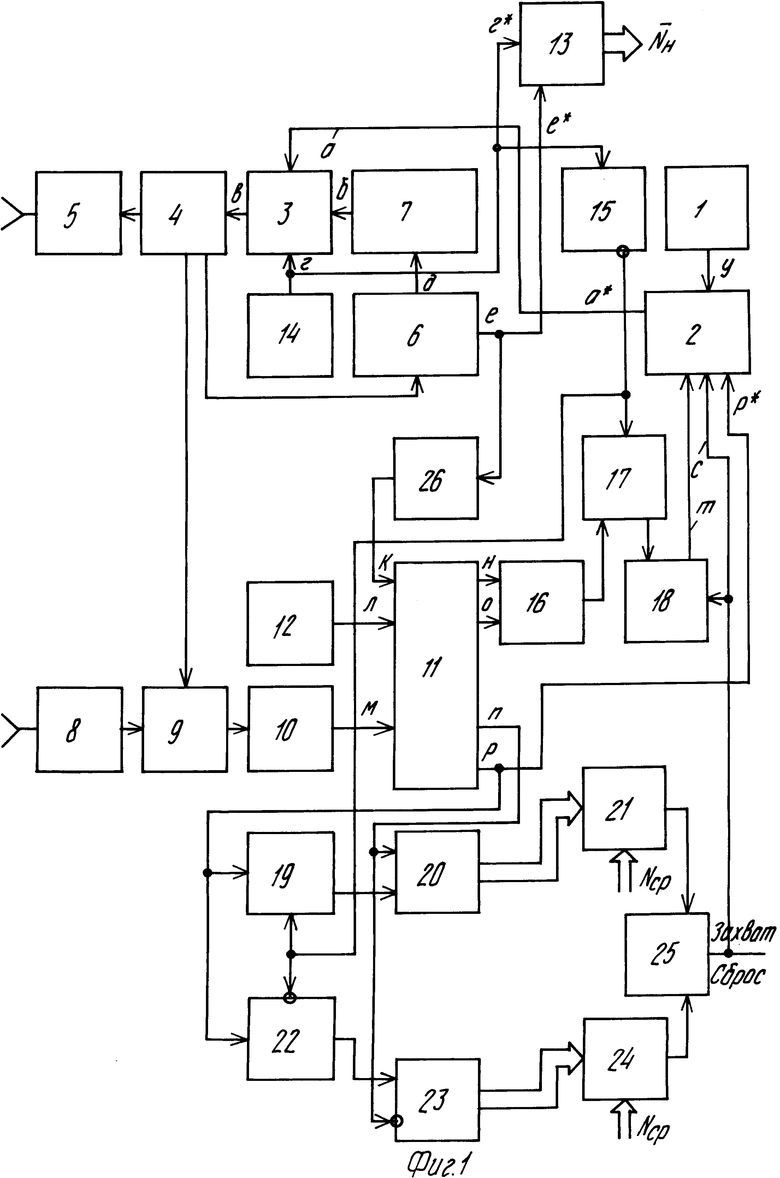
Частотно-модулированный высотомер, содержащий последовательно соединенные источник опорного аналогового сигнала, блок управления скоростью перестройки частоты передатчика, генератор пилообразных колебаний, передатчик и передающую антенну, последовательно соединенные блок формирования измерительного интервала полосы модуляции и блок переключения направления перестройки частоты передатчика, выход которого соединен с вторым входом генератора пилообразных колебаний, последовательно соединенные приемную антенну, смеситель, усилитель преобразованного сигнала и цифровой релейный элемент, первый выход которого соединен с вторым входом блока управления скоростью перестройки частоты передатчика, генератор тактовых импульсов и преобразователь временной интервал-код, при этом второй и третий выходы передатчика соединены соответственно с вторым входом смесителя и входом блока формирования измерительного интервала полосы модуляции, второй выход которого соединен с первым входом преобразователя временной интервал-код, выход генератора тактовых импульсов соединен с вторым входом цифрового релейного элемента, отличающийся тем, что введены генератор прямоугольных колебаний, первый блок задержки, последовательно соединенные первый сумматор по модулю два, второй сумматор по модулю два и первый элемент И, последовательно соединенные первый ключ, первый накопитель и первое пороговое устройство, последовательно соединенные второй ключ, второй накопитель и второе пороговое устройство, второй элемент И, входы которого соединены с выходами пороговых устройств, второй блок задержки, включенный между вторым выходом блока формирования измерительного интервала полосы модуляции и третьим входом цифрового релейного элемента, первый выход которого соединен с первыми входами ключей, второй выход соединен с вторыми входами накопителей, третий и четвертый выходы соединены с входами первого сумматора по модулю два, выход генератора прямоугольных колебаний соединен с третьим входом генератора пилообразных колебаний, с вторым входом преобразователя временной интервал-код и с входом первого блока задержки, выход которого соединен с вторым входом второго сумматора по модулю два и с вторыми входами ключей, выход второго элемента И соединен с вторым входом первого элемента И и с третьим входом блока управления скоростью перестройки частоты передатчика, четвертый вход которого соединен с выходом первого элемента И.
| GB, патент, 1207565, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| SU, авторское свидетельство, 717676, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
