Изобретение относится к области радиолокации.
Известно бортовое радиолокационное устройство, измеряющее высоту полета летательного аппарата над земной поверхностью и формирующее сигнал, свидетельствующий об обнаружении цели, дальность до которой меньше, чем высота полета, например патент Англии N 1369619, кл. G 01 S 13/34, опубликован 9 октября 1974 г. Радиолокационное устройство (аналог) содержит последовательно соединенные передатчик с частотной модуляцией, антенный переключатель, приемопередающую антенну, высокочастотный усилитель, первый смеситель, среднечастотный усилитель, второй смеситель, частотный дискриминатор, фильтрующее устройство кольца обратной связи, генератор периодических колебаний пилообразной формы, выход которого соединен с входом передатчика, второй выход передатчика соединен с вторым входом второго смесителя, последовательно соединенные генератор низкочастотных гармонических колебаний, третий смеситель, фильтр сигнала цели и детектор-накопитель, автопилот, при этом второй выход генератора периодических колебаний пилообразной формы соединен с входами генератора низкочастотных гармонических колебаний и автопилота, второй вход третьего смесителя соединен с выходом второго смесителя. В данном устройстве автопилот задает необходимую высоту Hп полета летательного аппарата, например 20 м, сравнивает ее с измеренной текущей высотой полета Hтек и выдает сигнал управления на рули высоты. Частота результирующего сигнала биений на выходе второго смесителя определяется настройкой частотного дискриминатора и сохраняет свое постоянное значение при изменении текущей высоты полета за счет пропорционального регулирования скорости перестройки частоты сигнала передатчика. Сигнал регулирования формируется на выходе частотного дискриминатора и через фильтрующее устройство кольца обратной связи воздействует на генератор периодических колебаний пилообразной формы. Фильтр сигнала цели, подключенный к выходу третьего смесителя, настроен на диапазон частот, соответствующий дальностям от 0 до 10 м при Hтек = Hп = 20 м.
В данном устройстве часть мощности сигнала передатчика отражается от приемопередающей антенны и проникает в приемный тракт. Этот сигнал (далее прямой сигнал) является помеховым и может привести к ложной выдаче сигнала обнаружения цели, так как он имитирует сигнал цели в области нулевой дальности. Другим недостатком аналога является недостаточная точность измерения дальности из-за нестабильности скорости перестройки частоты сигнала передатчика.
Наиболее близким аналогом (прототипом) по совокупности существенных признаков является радиолокационное устройство, содержащее последовательно соединенные реверсивный счетчик, цифроаналоговый преобразователь, генератор периодических колебаний пилообразной формы, передатчик с частотной модуляцией и передающую антенну, источник опорного аналогового сигнала, выход которого соединен с вторым входом цифроаналогового преобразователя, последовательно соединенные приемную антенну, смеситель, усилитель преобразованного сигнала, цифровой частотный дискриминатор, накопитель и пороговое устройство, последовательно соединенные блок формирования измерительного интервала полосы модуляции и формирователь импульсов, последовательно соединенные первый генератор тактовых импульсов, элемент И и счетчик, второй генератор тактовых импульсов, при этом второй вход смесителя соединен с вторым выходом передатчика, третий выход которого соединен с входом блока формирования измерительного интервала полосы модуляции, второй вход элемента И соединен с выходом блока формирования измерительного интервала полосы модуляции, второй вход формирователя импульсов соединен с выходом первого генератора тактовых импульсов, первый выход формирователя импульсов соединен с вторым входом счетчика, выход второго генератора тактовых импульсов соединен с вторым входом цифрового частотного дискриминатора (заявка на выдачу патента РФ N 98107607/09 от 21.04.98 г, МПК6 G 01 S 13/34).
Прототип осуществляет измерение высоты полета летательного аппарата над земной поверхностью. Задача выдачи сигнала, свидетельствующего об обнаружении цели, дальность до которой меньше, чем высота полета, прототипом не решается.
Целью настоящего изобретения является решение задачи выдачи сигнала, свидетельствующего об обнаружении цели в диапазоне от минимальной дальности Дмин до максимальной дальности Дмакс, причем значение максимальной дальности регулируется автоматически внешним устройством или задается оператором, а значение Дмин сохраняется неизменным.
По сравнению с аналогом технический результат заключается в уменьшении вероятности ложной выдачи сигнала обнаружения цели из-за влияния прямого сигнала и повышении точности измерения дальности до цели.
По сравнению с прототипом технический результат заключается в новой функции изобретения - возможности выдачи сигнала, свидетельствующего об обнаружении цели, дальность до которой меньше, чем высота полета летательного аппарата.
Изобретение представлено в двух вариантах.
В первом варианте выполнения изобретения поставленная цель достигается тем, что, в радиолокационное устройство для измерения дальности, содержащее последовательно соединенные генератор периодических колебаний пилообразной формы, передатчик с частотной модуляцией и передающую антенну, последовательно соединенные приемную антенну, смеситель, усилитель преобразованного сигнала, цифровой частотный дискриминатор, накопитель и пороговое устройство, последовательно соединенные блок формирования измерительного интервала полосы модуляции и формирователь импульсов, последовательно соединенные первый генератор тактовых импульсов, элемент И и счетчик, второй генератор тактовых импульсов, при этом второй вход смесителя соединен с вторым выходом передатчика, третий выход которого соединен с входом блока формирования измерительного интервала полосы модуляции, второй вход элемента И соединен с выходом блока формирования измерительного интервала полосы модуляции, второй вход формирователя импульсов соединен с выходом первого генератора тактовых импульсов, первый выход формирователя импульсов соединен с вторым входом счетчика, выход второго генератора тактовых импульсов соединен с вторым входом цифрового частотного дискриминатора, введен регистр памяти, при этом выход счетчика соединен с первым входом регистра памяти, второй вход которого соединен с вторым выходом формирователя импульсов, выход регистра памяти соединен с третьим входом цифрового частотного дискриминатора.
Во втором варианте выполнения изобретения поставленная цель достигается тем, что, в радиолокационное устройство для измерения дальности, содержащее последовательно соединенные реверсивный счетчик, цифроаналоговый преобразователь, генератор периодических колебаний пилообразной формы, передатчик с частотной модуляцией и передающую антенну, источник опорного аналогового сигнала, выход которого соединен с вторым входом цифроаналогового преобразователя, последовательно соединенные приемную антенну, смеситель, усилитель преобразованного сигнала, цифровой частотный дискриминатор, накопитель и пороговое устройство, последовательно соединенные блок формирования измерительного интервала полосы модуляции и формирователь импульсов, последовательно соединенные первый генератор тактовых импульсов, элемент И и счетчик, второй генератор тактовых импульсов, при этом второй вход смесителя соединен с вторым выходом передатчика, третий выход которого соединен с входом блока формирования измерительного интервала полосы модуляции, второй вход элемента И соединен с выходом блока формирования измерительного интервала полосы модуляции, второй вход формирователя импульсов соединен с выходом первого генератора тактовых импульсов, первый выход формирователя импульсов соединен с вторым входом счетчика, выход второго генератора тактовых импульсов соединен с вторым входом цифрового частотного дискриминатора, введены регистр памяти и цифровой компаратор, при этом выход счетчика соединен с первым входом регистра памяти, второй вход которого соединен с вторым выходом формирователя импульсов, выход регистра памяти соединен с третьим входом цифрового частотного дискриминатора и с входом цифрового компаратора, выход цифрового компаратора соединен с первым входом реверсивного счетчика, второй вход которого соединен с первым выходом формирователя импульсов.
На фиг. 1 представлена структурная электрическая схема радиолокационного устройства для измерения дальности в первом варианте выполнения изобретения;
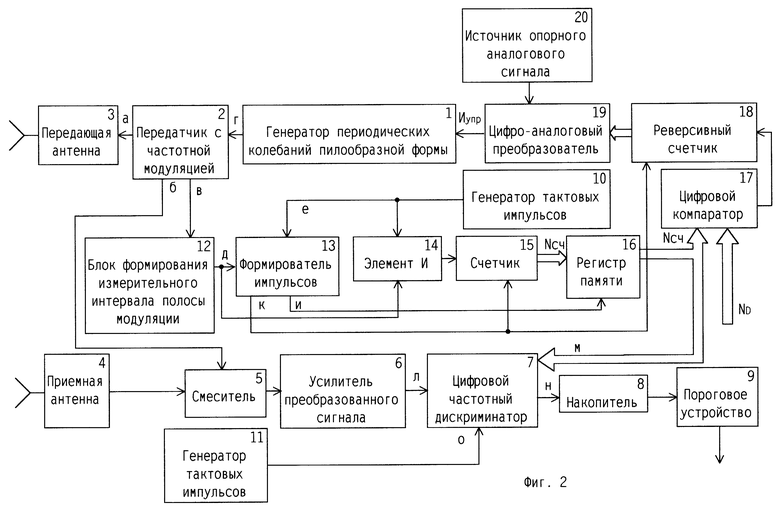
на фиг. 2 представлена структурная электрическая схема радиолокационного устройства для измерения дальности во втором варианте выполнения изобретения;
на фиг. 3, 4, 5, 6 представлены структурные электрические схемы составных частей радиолокационного устройства,
на фиг. 7, 8, 9 представлены эпюры и временные диаграммы сигналов в различных точках схемы радиолокационного устройства.
Радиолокационное устройство в первом варианте выполнения (фиг. 1) содержит генератор 1 периодических колебаний пилообразной формы, передатчик 2 с частотной модуляцией, передающую антенну 3, приемную антенну 4, смеситель 5, усилитель 6 преобразованного сигнала, цифровой частотный дискриминатор 7, накопитель 8, пороговое устройство 9, генератор 10 тактовых импульсов, генератор 11 тактовых импульсов, блок 12 формирования измерительного интервала полосы модуляции, формирователь импульсов 13, элемент И 14, счетчик 15, регистр памяти 16.
Радиолокационное устройство во втором варианте выполнения (фиг. 2) содержит генератор 1 периодических колебаний пилообразной формы, передатчик 2 с частотной модуляцией, передающую антенну 3, приемную антенну 4, смеситель 5, усилитель 6 преобразованного сигнала, цифровой частотный дискриминатор 7, накопитель 8, пороговое устройство 9, генератор 10 тактовых импульсов, генератор 11 тактовых импульсов, блок 12 формирования измерительного интервала полосы модуляции, формирователь импульсов 13, элемент И 14, счетчик 15, регистр памяти 16, цифровой компаратор 17, реверсивный счетчик 18, цифроаналоговый преобразователь 19, источник 20 опорного аналогового сигнала.
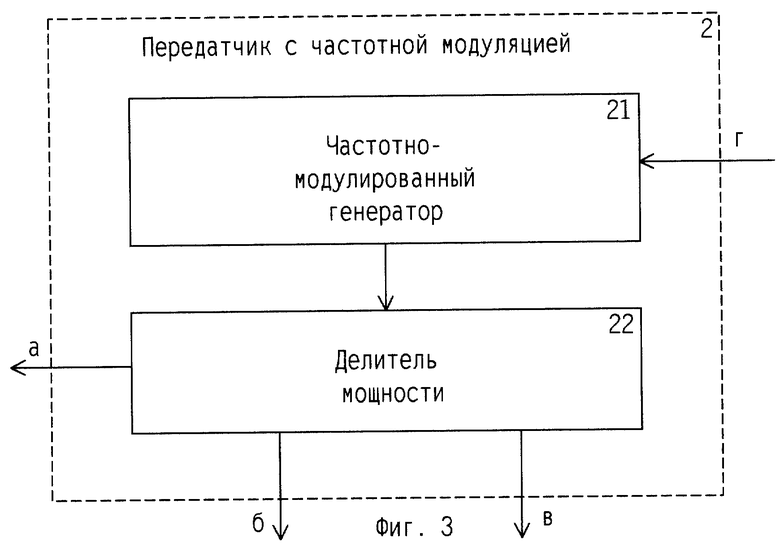
Передатчик 2 (фиг. 3) содержит частотно-модулированный генератор 21 и делитель мощности 22.
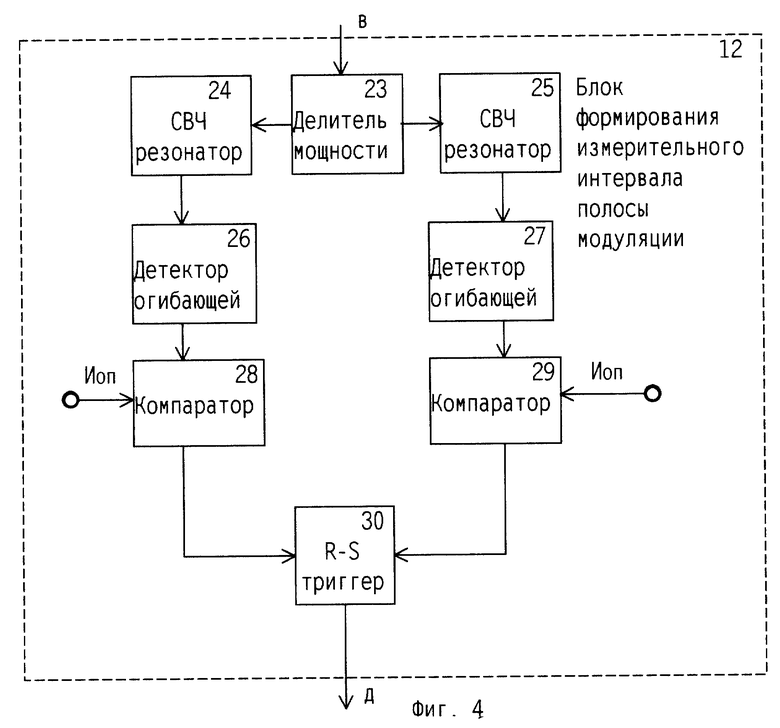
Блок 12 формирования измерительного интервала полосы модуляции (фиг. 4) содержит делитель мощности 23, СВЧ-резонаторы 24, 25, детекторы огибающей 26, 27, компараторы 28, 29 и RS-триггер 30.
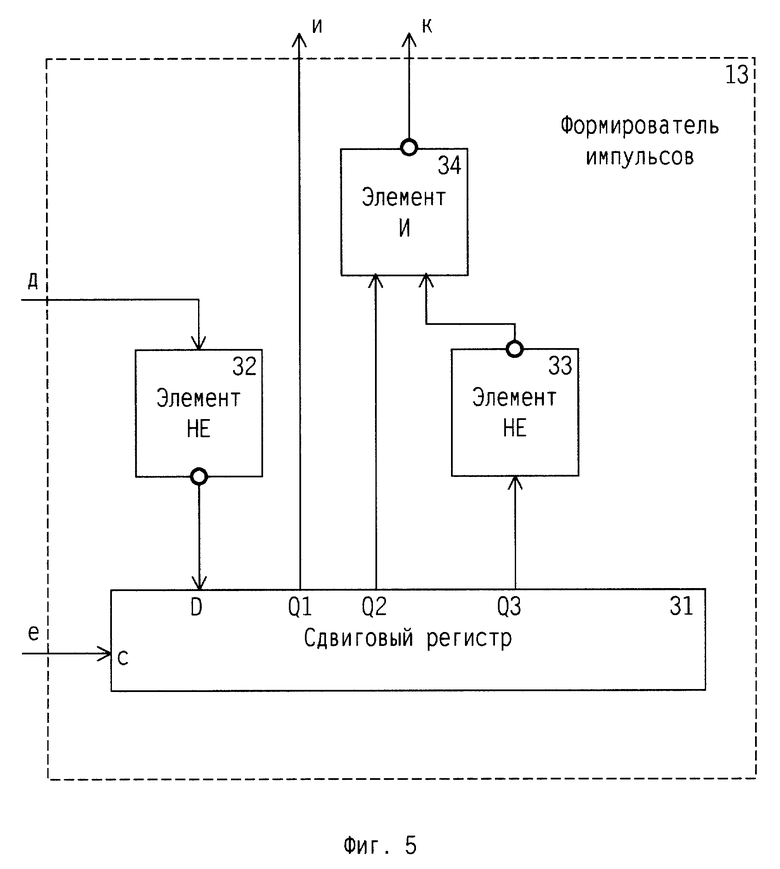
Формирователь импульсов 13 (фиг. 5) содержит сдвиговый регистр 31, элементы НЕ 32, 33 и элемент И 34.
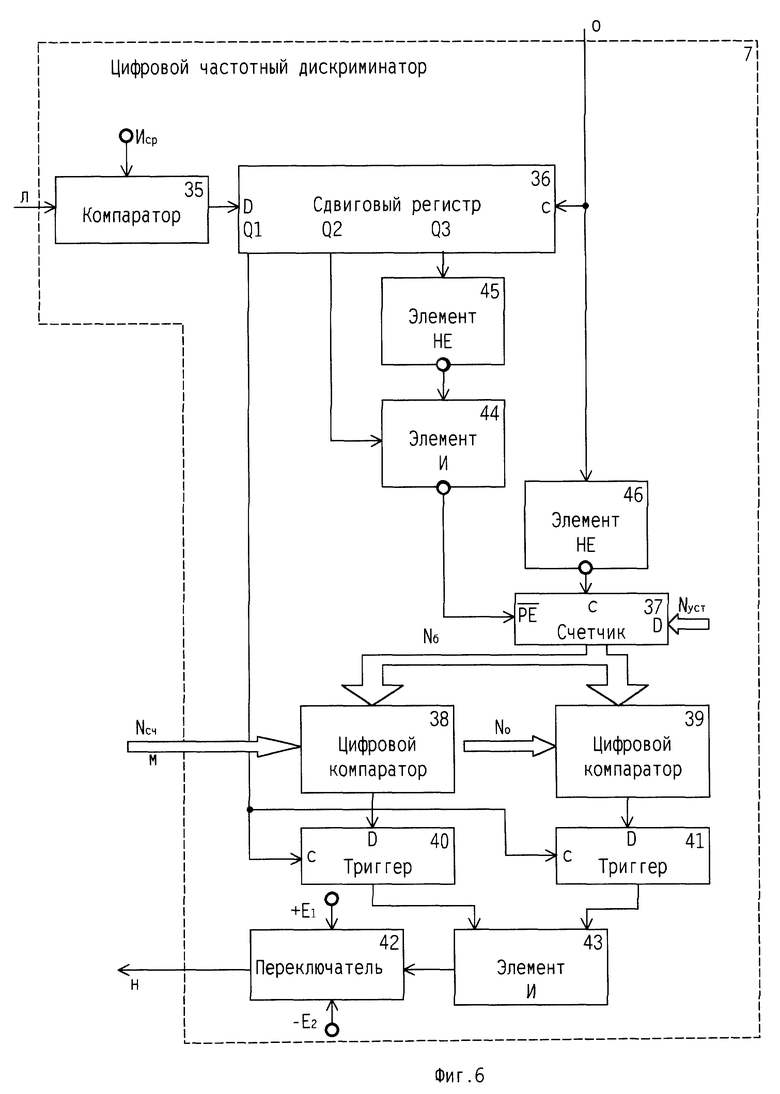
Цифровой частотный дискриминатор 7 (фиг. 6) содержит компаратор 35, сдвиговый регистр 36, счетчик 37, цифровые компараторы 38, 39, триггеры 40, 41, переключатель 42, элементы И 43, 44, элементы НЕ 45, 46.
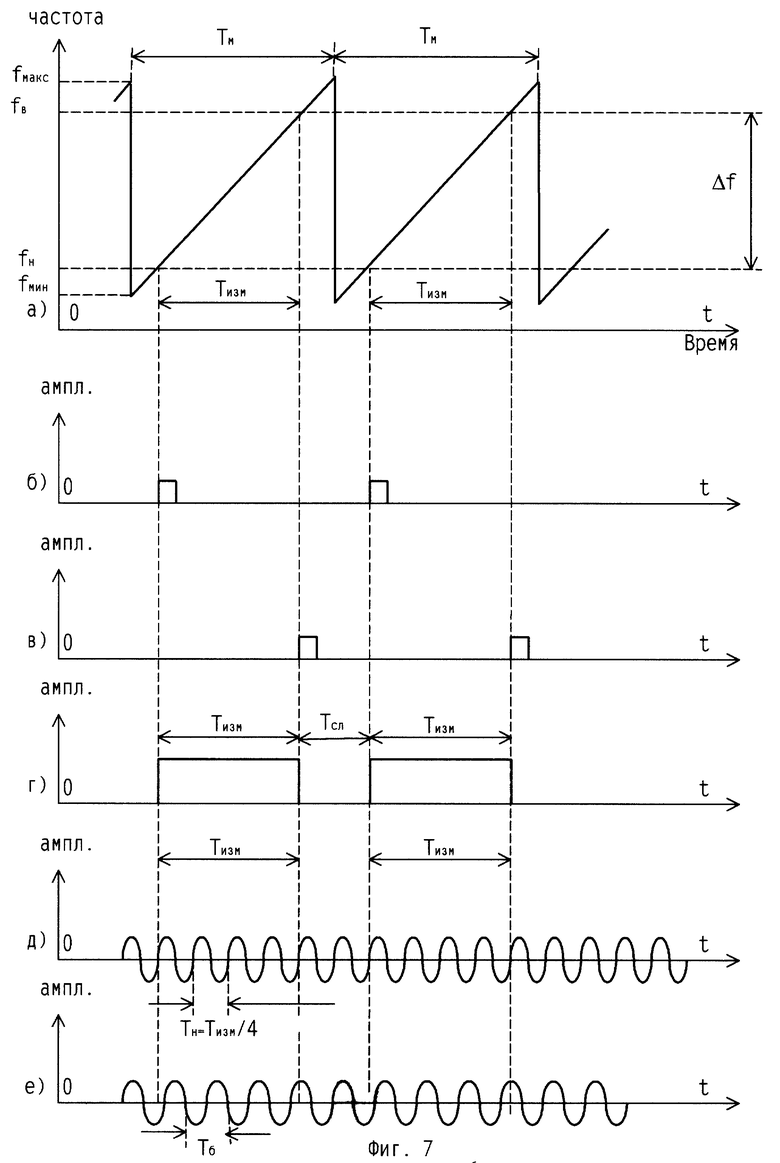
Радиолокационное устройство в первом варианте выполнения работает следующим образом. Генератор 1 формирует периодическое колебание пилообразной формы с периодом повторения Tм. Периодические колебания поступают на вход передатчика 2. С помощью колебаний пилообразной формы в диапазоне частот от fмин до fмакс осуществляется линейная частотная модуляция сигнала генератора 21 (фиг. 3, фиг.7а). На выходах делителя 22 формируются сигналы, идентичные по структуре входному сигналу, но различные по уровню мощности. Сигнал передатчика поступает на вход блока 12 (фиг.4), где он делится пополам по мощности в делителе 23. Выходные сигналы делителя 23 поступают на СВЧ-резонатор 24 с центральной частотой настройки fн и СВЧ-резонатор 25 с центральной частотой настройки fв. В моменты времени, когда частота сигнала передатчика соответствует частоте настройки СВЧ-резонатора 24 или 25, амплитуда колебаний сигнала соответствующего резонатора резко возрастает, соответственно возрастает и амплитуда сигнала на выходе детектора 26 или 27, которые выделяют огибающую входного СВЧ-сигнала. Выходные сигналы детекторов 26, 27 поступают на первые входы компараторов 28, 29, где они сравниваются с опорным напряжением Uоп. На выходе компаратора 28 (фиг. 7б) и компаратора 29 (фиг. 7в) формируются нормированные импульсы, соответствующие моментам времени, когда частота сигнала передатчика соответствует частоте настройки fн или fв СВЧ-резонаторов. Выходные сигналы компараторов 28, 29 управляют работой RS-триггера 30. На фиг.7г представлена временная диаграмма выходного сигнала RS-триггера 30. Сформированный таким образом временной интервал Tизм соответствует времени, в течение которого частота сигнала передатчика перестраивается в диапазоне частот от fн до fв, обозначенном далее как Δf. При воздействии различного рода дестабилизирующих факторов значение Δf выдерживается с достаточно высокой степенью точности, например Δf = (144 ± 2) МГц во всех условиях эксплуатации. Поэтому время Tизм является эталонным измерительным интервалом, с помощью которого при известном значении Δf можно определить скорость S перестройки частоты сигнала передатчика:
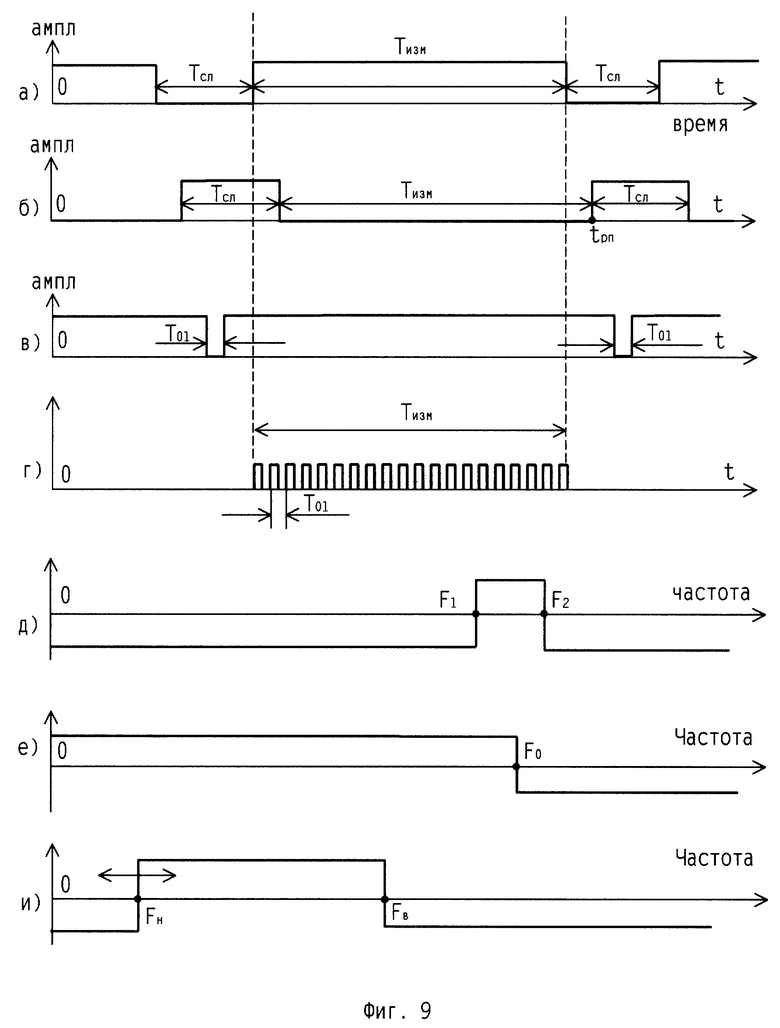
Скорость S перестройки частоты сигнала передатчика регулируется с помощью управляющего напряжения Uупр, которое поступает извне на вход генератора 1. Чем больше значение Uупр, тем больше значение S и наоборот. Импульсный сигнал с выхода блока 12 (фиг.9а) поступает на входы элемента 14 и формирователя 13. На вторые входы элемента 14 и формирователя 13 поступают тактовые импульсы генератора 10 с периодом повторения T01, который стабилизирован кварцевым резонатором. Временная диаграмма сигнала на выходе Q1 сдвигового регистра 31 (фиг. 5), который синхронизируется импульсами генератора 10, представлена на фиг. 9б, временная диаграмма сигнала на выходе элемента 34 представлена на фиг. 9в. Пачка импульсов (фиг. 9г) с выхода элемента 14 (фиг. 1) поступает на счетный вход счетчика 15. В момент окончания пачки содержимое счетчика (параллельный двоичный код) достигает значения
В момент времени tрп (фиг. 9б), соответствующий положительному перепаду импульса длительностью Tсл, содержимое счетчика 15 загружается в регистр памяти 16, затем во время действия отрицательного импульса длительностью T01 (фиг. 9в) содержимое счетчика обнуляется. С приходом новой пачки импульсов процесс повторяется вновь. Таким образом, в течение времени Tизм содержимое регистра памяти 16 остается неизменным и равным Nсч. Сигнал передатчика поступает на передающую антенну 3 и излучается в направлении цели. Отраженный от цели сигнал, претерпевший задержку τц, принимается приемной антенной 4 и поступает на первый вход смесителя 5, на второй вход которого подается часть мощности сигнала передатчика. В результате преобразования на выходе смесителя образуется результирующий сигнал биений, частота которого определяется выражением
где τц - задержка сигнала, равная времени распространения радиоволн до цели и обратно, с;
τост - остаточная задержка, определяемая задержкой сигнала в элементах приемопередающего тракта (элементы 2, 3, 4, 5, включая соединительные СВЧ-кабели), с;
Дц - дальность до цели, м; остаточная дальность, соответствующая остаточной задержке τост, м;
остаточная дальность, соответствующая остаточной задержке τост, м;
c - скорость распространения радиоволн, 3•108 м/с.
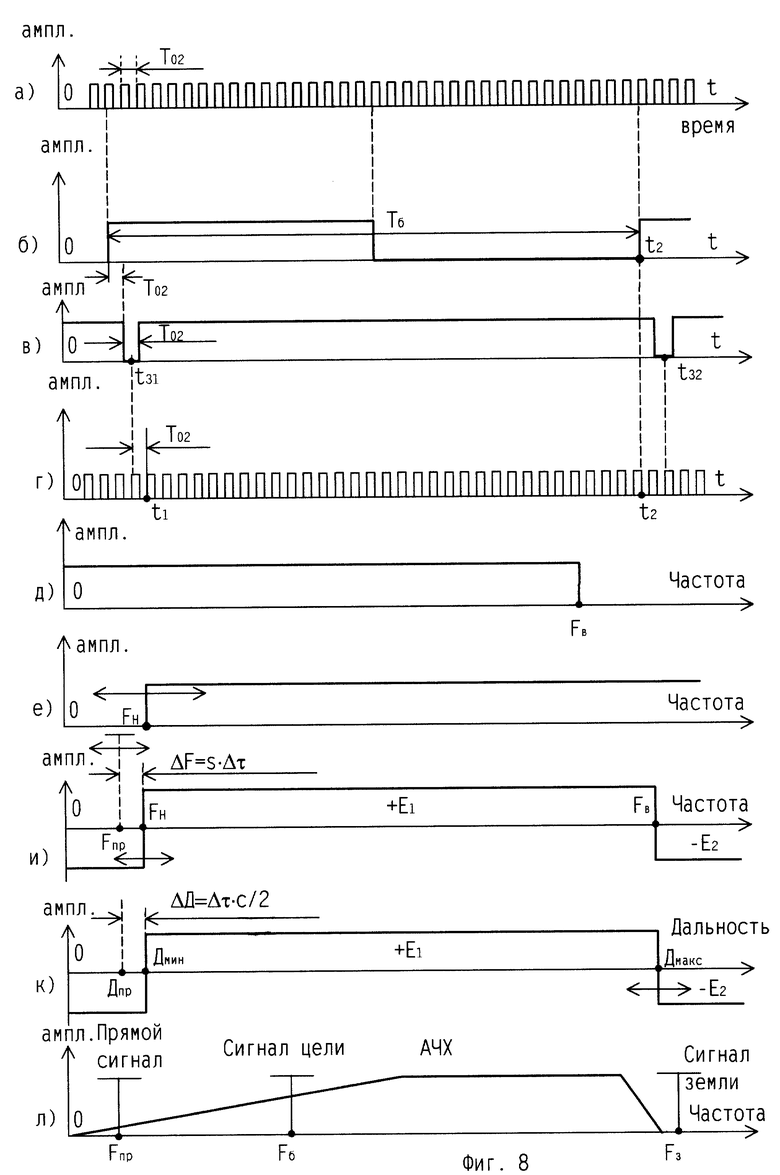
Результирующий сигнал биений усиливается усилителем 6 и поступает на первый вход цифрового частотного дискриминатора 7. На второй и третий входы цифрового частотного дискриминатора поступают соответственно содержимое регистра памяти 16 и тактовые импульсы генератора 11 с периодом повторения T02, который стабилизирован кварцевым резонатором. Работа цифрового частотного дискриминатора 7 (фиг. 6) поясняется с помощью временных диаграмм (фиг. 8). Результирующий сигнал биений, период мгновенного колебания которого равен Tб, сравнивается в компараторе 35 с опорным напряжением Uср и квантуется на его выходе на два логических уровня (1, 0). Мгновенное колебание с выхода компаратора поступает на вход сдвигового регистра 36, который синхронизируется импульсами генератора 11 (фиг. 8а). Задержанное на время T02 мгновенное колебание (фиг. 8б) с выхода Q1 сдвигового регистра поступает на входы синхронизации триггеров 40, 41. Задержанные на время 2T02 и 3T02 сигналы с выходов Q2 и Q3 сдвигового регистра 36 поступают на входы элементов 44, 45. На выходе элемента 44 формируется отрицательный импульс длительностью T02 (фиг. 8в), во время которого в момент времени tз1 по положительному перепаду проинвертированного тактового импульса с выхода элемента 46 (фиг. 8г) в счетчик 37 загружается двоичный код Nуст, который необходим для того, чтобы скомпенсировать недостающие счетные импульсы на интервале Tб, так как часть интервала Tб не используется для накопления содержимого счетчика 37. После окончания отрицательного импульса длительностью T02, начиная с момента t1 содержимое счетчика 37 увеличивается начиная с Nуст и к моменту t2 окончания колебания достигнет значения Nб:
Содержимое счетчика 37 поступает на первые входы цифровых компараторов 38, 39. В цифровом компараторе 39 содержимое счетчика 37 сравнивается с опорным кодом N0, который определяет верхнюю граничную частоту Fв дискриминатора 7, соответствующую периоду Tв:
при
Tб = Tв; (6)
Nб = N0. (7)
В цифровом компараторе 38 содержимое счетчика 37 сравнивается с содержимым Nсч регистра памяти 16, которое определяет нижнюю граничную частоту Fн дискриминатора 7, соответствующую периоду Tн:
при
Tб = Tн; (9)
Nб = Nсч. (10)
В зависимости от результата сравнения на выходе цифрового компаратора 39 (фиг. 8д), на выходе цифрового компаратора 38 (фиг. 8е) формируется либо логическая 1 либо логический 0. В момент времени t2 (фиг. 86) результат сравнения заносится в триггеры 40, 41. Выходные сигналы триггеров 40, 41 перемножаются в элементе 43 и поступают на управляющий вход переключателя 42. При подаче на управляющий вход переключателя 42 выходного сигнала элемента 43 в виде логической 1 или логического 0 на его выход поступает напряжение +E1 или -E2. На фиг. 8и представлена характеристика цифрового частотного дискриминатора 7 в зависимости от входной частоты результирующего сигнала биений. С учетом (3) на фиг.8к представлена характеристика цифрового частотного дискриминатора 7 в зависимости от дальности. Если дальность до цели находится в диапазоне от Дмин до Дмакс и отношение сигнал/шум на входе цифрового частотного дискриминатора 7 превышает пороговое значение, то с выхода переключателя 42 на вход накопителя 8 (например, фильтра нижних частот) начинает поступать напряжение +E1, которое после достижения на выходе накопителя заданного уровня вызывает срабатывание порогового устройства 9, что свидетельствует о наличии цели. Если дальность до цели менее Дмин или более Дмакс, то с выхода переключателя 42 на вход накопителя 8 поступает напряжение -E2 и на выходе накопителя накапливается сигнал отрицательной полярности, что не вызывает срабатывание порогового устройства 9.
На фиг 8л представлена амплитудно-частотная характеристика (АЧХ) усилителя 6 преобразованного сигнала, она имеет пологий спад в области нижних частот для обеспечения автоматической регулировки усиления по дальности при работе по заданным типам цели и крутой спад в области верхних частот для ослабления сигнала земной поверхности. На фиг. 8л условно спектральными линиями представлены сигнал земли на частоте Fз, сигнал цели на частоте Fб и прямой сигнал на частоте Fпр. Из (3) при Fб = Fв, Дц = Дмакс
Из (11) следует, что при неизменном значении Fв настроить радиолокационное устройство на конкретную максимальную дальность срабатывания Дмакс можно с помощью параметра S, который, в свою очередь, регулируется управляющим напряжением Uупр. Частота Fпр прямого сигнала определяется выражением
где τпр - задержка прямого сигнала при распространении из передающей антенны в приемную антенну; дальность, соответствующая задержке прямого сигнала, равна половине расстояния между передающей и приемной антеннами.
дальность, соответствующая задержке прямого сигнала, равна половине расстояния между передающей и приемной антеннами.
При увеличении (уменьшении) значения S пропорционально увеличивается (уменьшается) значение Fпр, соответствующее дальности Дпр прямого сигнала. Для того, чтобы исключить ложное срабатывание по прямому сигналу, необходимо адекватно изменять значение нижней граничной частоты Fн (фиг. 8е, и). В заявленной совокупности признаков несрабатывание по прямому сигналу обеспечивается следующим образом. Граничные условия несрабатывания устройства по прямому сигналу определяются следующими равенствами:
Fпр=Fн; (13)
Дпр=Дмин. (14)
Для обеспечения надежного несрабатывания радиолокационного устройства по прямому сигналу необходимо выполнение следующих неравенств:
Fпр<Fн, (15)
Дпр<Дмин. (16)
Поэтому необходимо ввести некоторый запас Δτ по задержке, обеспечивающий достаточный технологический запас по частоте ΔF по дальности ΔД:
Fпр+ΔF ≤ Fн (17)
Дпр+ΔД ≤ Дмин (18)
Известно выражение, определяющее взаимосвязь между числом n периодов колебаний результирующего сигнала биений на интервале Tизм, в течение которого частота сигнала передатчика перестраивается в диапазоне Δf, и задержкой сигнала τ:
n = Δfτ (19)
Для прямого сигнала с учетом остаточной задержки
n = Δf(τпр+τост) (20)
С учетом технологического запаса
n = Δf(τпр+τост+Δf) (21)
где Δτ - условная (воображаемая) задержка прямого сигнала, определяющая технологический запас ΔF по частоте и ΔД по дальности:
ΔF = SΔτ (22)
Для удобства сопряжения элементов радиолокационного устройства целесообразно параметр n задавать в виде целого числа путем соответствующего подбора параметров Δf, τост, Δτ. На фиг.7д в соответствии с (21) представлена условная (воображаемая) осциллограмма колебания прямого сигнала на выходе смесителя 5 при n, равном 4. Такая условная (воображаемая) осциллограмма колебания прямого сигнала соответствует граничным условиям несрабатывания (13), (14). Таким образом, если значение мгновенного периода колебания прямого сигнала на выходе смесителя будет равно Tизм/4, это означает выполнение равенств (13), (14). Данный признак используется для автоматического регулирования значения нижней граничной частоты Fн цифрового частотного дискриминатора 7 по измеренному значению Tизм в виде параллельного двоичного кода Nсч. Из (8) следует
Tн=Nсч•T02 (24)
с учетом (2)
Подставляя в (25) значение Tн = Tизм/4, получим
T01=4T02. (26)
Таким образом, для обеспечения правильной работы устройства период T01 повторения тактовых импульсов генератора 10 должен быть в 4 раза больше, чем период T02 повторения тактовых импульсов генератора 11, что справедливо, так как при Tб = Tн = Tизм/4, для того, чтобы удовлетворить условию (10): Nб = Nсч, темп изменения содержимого счетчика 37, работающего на интервале Tб = Tн = Tизм/4, должен быть соответственно в 4 раза выше, чем темп изменения содержимого счетчика 15, работающего на интервале Tизм = 4Tн. На фиг.7е в соответствии с (20) представлена реальная осциллограмма колебания прямого сигнала на выходе смесителя 5, при этом на измерительном интервале Tизм укладывается 3,33 периода Tб колебаний, что соответствует выполнению условий (15), (16), обеспечивая необходимый технологический запас по частоте ΔF и по дальности ΔД (фиг.8и, к). Погрешность установки значения Fн в зависимости от параметра S определяется в основном относительной погрешностью δ параметра Δf = (144 ± 2) МГц:
В предлагаемом техническом решении по первому варианту выполнения необходимое значение максимальной дальности срабатывания Дмакс устанавливается путем выбора соответствующего значения управляющего напряжения Uупр. Чем меньше значение Uупр, тем больше значение Дмакс и наоборот, при этом значение Дмин остается неизменным и равным, например, 1 м при Дпр = 0,5 м:
где K - постоянный коэффициент.
В погрешность установки Дмакс в этом случае кроме погрешности δ входит погрешность установки управляющего напряжения Uупр и погрешность, вызванная нестабильностью коэффициентов передачи генератора 1 и передатчика 2. Значение управляющего напряжения устанавливается оператором или каким-либо внешним устройством.
Предлагаемое техническое решение по первому варианту выполнения может быть использовано совместно с системой радиовысотомера, при этом схема на фиг. 1 должна быть дополнена известными устройствами: дискриминатором слежения за сигналом высоты, обнаружителем сигнала высоты и устройством формирования управляющего напряжения. Амплитудно-частотная характеристика дискриминатора слежения за сигналом высоты представлена на фиг.9е, где F0 - частота слежения, амплитудно-частотная характеристика обнаружителя сигнала высоты представлена на фиг.9д, где F1 и F2 - граничные частоты, в пределах которых производится обнаружение сигнала высоты. Амплитудно-частотная характеристика цифрового частотного дискриминатора 7 должна соответствовать фиг. 9и. Можно показать, что в этом случае максимальная дальность срабатывания Дмакс зависит от текущей высоты полета Hтек:
Дмакс = HтекKд-(1-Kд)Дост, (29)
где
Изменяя параметр Kд, можно устанавливать необходимое соотношение между Дмакс и Hтек. Из анализа (29), (30) следует, что в погрешность установки Дмакс не входит погрешность, связанная с погрешностью формирования управляющего напряжения Uупр и нестабильностями коэффициентов передачи генератора 1, передатчика 2. Это объясняется наличием частотного дискриминатора, который осуществляет слежение за сигналом текущей высоты и вырабатывает сигнал для формирования необходимого значения управляющего напряжения.
Работа радиолокационного устройства по второму варианту выполнения (фиг. 2) отличается тем, что установка необходимого значения Дмакс осуществляется с помощью параллельного двоичного кода ND, который может вводиться оператором или внешним устройством. В цифровом компараторе 17 код Nсч сравнивается с заданным кодом ND. В зависимости от результата сравнения на выходе цифрового компаратора 17 формируется логическая 1 или логический 0, в результате чего содержимое Nрс реверсивного счетчика 18 с приходом каждого отрицательного перепада счетного импульса длительностью T01 (фиг.9в), поступающего на его счетный вход с выхода формирователя 13, увеличивается или уменьшается. Содержимое реверсивного счетчика 18 в виде параллельного двоичного кода Nрс поступает на информационные входы цифроаналогового преобразователя 19, на опорный вход которого подается напряжение Uо с выхода источника 20. Значение управляющего напряжения на выходе цифроаналогового преобразователя 19 определяется выражением
где m - число разрядов реверсивного счетчика.
Управляющее напряжение Uупр может быть сформировано и в виде прямо-пропорциональной зависимости от параметра Nрс, что не изменяет техническую сущность изобретения. Содержимое реверсивного счетчика и управляющее напряжение изменяются до тех пор, пока не выполнится условие
Nсч = ND, (32)
где
Из (1), (11)
где
Решая совместно (32), (33), (34), получим выражение, определяющее значение максимальной дальности Дмакс в зависимости от кода ND:
Дмакс= NDαT01-Дост (36)
Преимущество второго варианта перед первым состоит в том, что, погрешность установки Дмакс в основном определяется относительной погрешностью δ параметра Δf:
δ = ±1,39% (37)
и не зависит от нестабильности коэффициентов передачи генератора 1, передатчика 2.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЧАСТОТНО-МОДУЛИРОВАННЫЙ ВЫСОТОМЕР | 1998 |
|
RU2133483C1 |
| ЧАСТОТНО-МОДУЛИРОВАННЫЙ ВЫСОТОМЕР | 1996 |
|
RU2106655C1 |
| РАДИОЛОКАЦИОННЫЙ ИМПУЛЬСНЫЙ РЕЦИРКУЛЯЦИОННЫЙ УРОВНЕМЕР | 2000 |
|
RU2176382C1 |
| ЧАСТОТНО-МОДУЛИРОВАННЫЙ РАДИОВЫСОТОМЕР | 2003 |
|
RU2263330C2 |
| РАДИОЛОКАЦИОННЫЙ ОТВЕТЧИК | 1994 |
|
RU2096805C1 |
| МОНОИМПУЛЬСНАЯ РЛС | 2004 |
|
RU2267137C1 |
| ЧАСТОТНО-МОДУЛИРОВАННЫЙ ВЫСОТОМЕР | 2003 |
|
RU2234718C1 |
| РАДИОДАТЧИК | 1994 |
|
RU2087922C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 1995 |
|
RU2095821C1 |
| РАДИОЛОКАЦИОННЫЙ ОТВЕТЧИК | 2000 |
|
RU2193783C2 |
Изобретение относится к области радиолокации и представляет собой радиолокационное устройство с непрерывным излучением радиоволн и линейной частотной модуляцией сигнала. В первом варианте выполнения радиолокационное устройство содержит последовательно соединенные генератор периодических колебаний пилообразной формы, передатчик с частотной модуляцией и передающую антенну, последовательно соединенные приемную антенну, смеситель, усилитель преобразованного сигнала, цифровой частотный дискриминатор, накопитель и пороговое устройство, последовательно соединенные блок формирования измерительного интервала полосы модуляции и формирователь импульсов, последовательно соединенные первый генератор тактовых импульсов, элемент И и счетчик, второй генератор тактовых импульсов, второй вход смесителя соединен с вторым выходом передатчика, третий выход которого соединен с входом блока формирования измерительного интервала полосы модуляции, второй вход элемента И соединен с выходом блока формирования измерительного интервала полосы модуляции, второй вход формирователя импульсов соединен с выходом первого генератора тактовых импульсов, первый выход формирователя импульсов соединен с вторым входом счетчика, выход второго генератора тактовых импульсов соединен с вторым входом цифрового частотного дискриминатора, регистр памяти, выход счетчика соединен с первым входом регистра памяти, второй вход которого соединен с вторым выходом формирователя импульсов, выход регистра памяти соединен с третьим входом цифрового частотного дискриминатора. Во втором варианте выполнения радиолокационное устройство содержит последовательно соединенные реверсивный счетчик, цифроаналоговый преобразователь, генератор периодических колебаний пилообразной формы, передатчик с частотной модуляцией и передающую антенну, источник опорного аналогового сигнала, выход которого соединен с вторым входом цифроаналогового преобразователя, последовательно соединенные приемную антенну, смеситель, усилитель преобразованного сигнала, цифровой частотный дискриминатор, накопитель и пороговое устройство, последовательно соединенные блок формирования измерительного интервала полосы модуляции и формирователь импульсов, последовательно соединенные первый генератор тактовых импульсов, элемент И и счетчик, второй генератор тактовых импульсов, второй вход смесителя соединен с вторым выходом передатчика, третий выход которого соединен с входом блока формирования измерительного интервала полосы модуляции, второй вход элемента И соединен с выходом блока формирования измерительного интервала полосы модуляции, второй вход формирователя импульсов соединен с выходом первого генератора тактовых импульсов, первый выход формирователя импульсов соединен с вторым входом счетчика, выход второго генератора тактовых импульсов соединен с вторым входом цифрового частотного дискриминатора, регистр памяти и цифровой компаратор, выход счетчика соединен с первым входом регистра памяти, второй вход которого соединен с вторым выходом формирователя импульсов, выход регистра памяти соединен с третьим входом цифрового частотного дискриминатора и с входом цифрового компаратора, выход цифрового компаратора соединен с первым входом реверсивного счетчика, второй вход которого соединен с первым выходом формирователя импульсов. Технический результат заключается в уменьшении вероятности ложной выдачи сигнала обнаружения цели и повышении точности измерения дальности до цели. 2 с. п. ф-лы, 9 ил.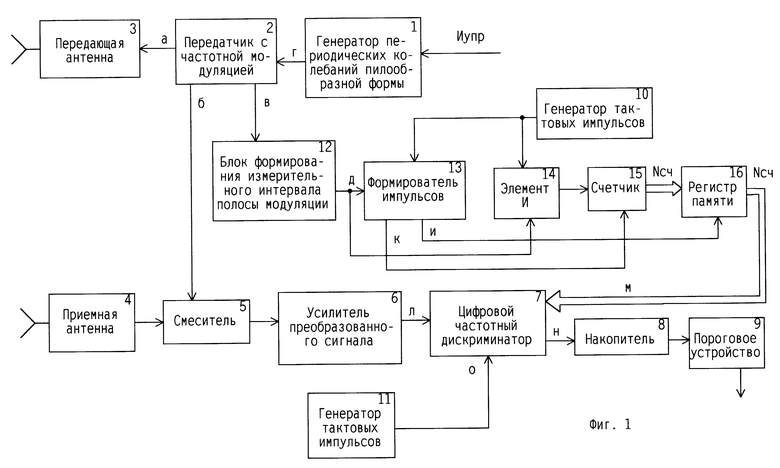
| RU 21066655 С1, 10.03.1998 | |||
| RU 95104775 А1, 20.01.1997 | |||
| US 4733239 А, 22.03.1988 | |||
| СПОСОБ И УСТРОЙСТВО МОНИТОРИНГА ТЕМПЕРАТУРЫ НА ОСНОВЕ ПАССИВНЫХ ЛИНИЙ ЗАДЕРЖКИ НА ПОВЕРХНОСТНЫХ АКУСТИЧЕСКИХ ВОЛНАХ С ФУНКЦИЕЙ АНТИКОЛЛИЗИИ | 2018 |
|
RU2756413C1 |
| Приспособление для вкладки промокательной бумаги одновременно с шитьем проволокой тетради | 1935 |
|
SU48170A1 |
| Устройство для ротационного выдавливания | 1982 |
|
SU1207565A1 |

