Предлагаемое изобретение относится к радиолокационной технике и может быть использовано в импульсно-доплеровских РЛС при измерениях малых дальностей, в т.ч. работающих на одну антенну в отсутствие временной развязки передатчик-приемник.
Проблема измерения малых дальностей связана с возможностью развязки приемника от зондирующего сигнала, проникающего на его вход через антенный переключатель в РЛС, работающих на одну антенну, или через боковые лепестки приемной и передающей антенн в РЛС, работающих на две антенны (сигнал утечки), а также от достаточно мощных сигналов, отраженных от элементов конструкции летательного аппарата ЛА, принятых антенной и отнесенных к амплитудным и фазовым шумам. Эти мощные сигналы при недостаточной пространственной, частотной и временной развязке могут привести приемник в насыщение с потерей чувствительности, к невозможности измерения малых задержек отраженного сигнала.
Известны подходы борьбы с сигналом утечки, амплитудными и фазовыми шумами. В способе [1] в РЛС с непрерывным зондирующим сигналом (подход распространим и на РЛС с импульсным зондирующим сигналом, где в паузе недостаточно подавляется межимпульсный непрерывный сигнал) производится отбор части мощности сигнала передатчика, задержка отобранного сигнала на величину, равную времени задержки сигнала утечки, называемого далее гетеродинным, из которого формируют управляемый по амплитуде и фазе сигнал коррекции, который в направленном ответвителе вычитают из сигнала утечки на выходе антенного переключателя, остаток переносят на видеочастоту путем смешивания с гетеродинным, дополнительно задержанным на время задержки сигнала утечки, усиливают по мощности, фильтруют в рабочей полосе частот, детектируют и используют для управления амплитудой и фазой сигнала коррекции, выравнивают задержку сигнала гетеродина и сигнала утечки с точностью до долей длины волны зондирующего сигнала.
Недостатком способа является сложность реализации, обеспечивающей выравнивание задержек сигналов коррекции и гетеродина с задержкой сигнала утечки. Степень подавления утечки не может быть больше -20lg(2πfδτ) дБ, где δτ - временное рассогласование сигналов компенсации и утечки, f - несущая частота зондирующего сигнала. Так на частоте 4,7 ГГц для развязки 60 дБ требуется δτ<0,3·10-4 нс, что технически реализовать очень сложно (требуется подбор длины кабеля, используемого в качестве задержки, с погрешностью менее 0,004 мм).
В устройстве [2] импульсного радиовысотомера, работающего в мм-диапазоне, применяется две разнесенные антенны (приемная и передающая), передающая антенна излучает импульсный сигнал, сформированный из непрерывного опорного СВЧ-сигнала импульсной модуляцией усилителя мощности. Отраженные сигналы и сигнал утечки принимаются приемной антенной, усиливаются малошумящим усилителем высокой частоты, переносятся на видео частоту балансным смесителем. В качестве гетеродинного используется опорный сигнал, прошедший через управляемый фазовращатель. После балансного смесителя принятый сигнал усиливается в усилителе, первый выход которого через схему управления поступает на управляющий вход фазовращателя, устанавливая его в положение, соответствующее нулевому сигналу утечки на первом выходе усилителя (ортогональность сигналов на входах балансного смесителя). Сигнал на втором выходе усилителя, соответствующий полезному сигналу, поступает в следящую систему по дальности, синхронизированную сигналом модулятора. Результат слежения - измеренная высота ЛА выводится потребителю на дисплей.
Недостатком устройства [2] является слабая развязка передатчик-приемник, равная сумме развязок, вызванной, в основном, пространственным разносом приемной и передающей антенн и формированием гетеродинного сигнала, ортогонального сигналу утечки (развязка с учетом амплитудных и фазовых шумов не более 15 дБ). Как следствие, измерение малых высот без достаточно большого пространственного разноса антенн при отсутствии временной развязки (временном перекрытии) зондирующего и отраженных сигналов невозможно.
В устройстве импульсно-доплеровского высотомера [3], принятом в качестве прототипа, развязка обеспечивается как за счет временной развязки передачи и приема отраженного сигнала, так и частотной, при которой когерентное накопление отраженного сигнала производится в области частот полезного сигнала, превышающих верхнюю границу низкочастотных коррелированных шумов до максимально возможной доплеровской меньшей частоты повторения. Низкочастотные коррелированные шумы вызваны мощными отражениями зондирующего сигнала от конструкций ЛА. Общая развязка в рабочем диапазоне высот, для которых задержка отраженного сигнала больше десятков длительностей зондирующего импульса, составляет не менее потенциала связи. Временная развязка обеспечивается тем, что период повторения зондирующего сигнала перестраивается в соответствии с задержкой строба дальности при поиске и сопровождении, при этом задержка спада строба дальности относительно зондирующего всегда равна половине периода повторения. В устройстве путем функционального преобразования периода повторения (задержки строба дальности) в выходную оценку учитывается смещение показаний от высоты.
Недостатком устройства [3] являются: 1) невозможность снижения минимальных измеряемых высот до нуля за счет недостаточной развязки приемника и передатчика антенным коммутатором и как следствие применения временной и частотной развязки между ними, 2) не предусмотрена согласованная фильтрация отраженного сигнала при перестройках длительности зондирующего сигнала от измеряемой высоты, что снижает потенциал связи (максимальную измеряемую высоту).
Целью предлагаемого изобретения является снижение минимально измеряемой высоты в когерентном импульсном высотомере малых высот, работающем на одну антенну, до нуля с одновременным повышением потенциала связи при увеличении измеряемой высоты.
Данная цель достигается тем, что в способ-прототип, включающий когерентное излучение простого импульсного сигнала с перестраиваемой по высоте длительностью и периодом повторения, когерентный прием отраженного сигнала с получением квадратурных составляющих на видеочастоте, когерентное накопление сигнала на задержке строба высоты в полосе доплеровских частот сигнала, отраженного от Земли, превышающих верхнюю границу низкочастотных коррелированных шумов, детектирование квадратурного сигнала путем вычисления мощности сигнала по квадратурным составляющим, пороговое обнаружение, по результатам которого и последующего детектирования формируется код задержки строба высоты, пропорциональный задержке строба высоты относительно зондирующего при поиске и сопровождении, функциональное табличное преобразование кода задержки строба высоты в соответствующие коды управления периодом и длительностью зондирующих импульсов, код управления длительностью строба высоты, равного длительности зондирующего импульса, и кода оценки измеренной высоты, формирование импульсов модуляции зондирующего сигнала и строба высоты с периодом и длительностью, соответствующим кодам управления, полученным в результате функционального табличного преобразования, согласно изобретению введены дополнительное функциональное табличное преобразование кода задержки строба высоты в сигнал регулировки усиления приемника, обеспечивающего прием стробируемого сигнала в линейном режиме, формирование строба упреждения, опережающего строб высоты на длительность зондирующего и равного ему, аналого-цифрового преобразования сигнала приемника с последующей режекцией сигналов утечки, амплитудных и фазовых шумов на задержке строба высоты в сигналах, подвергаемых когерентному накоплению, при этом режекция сигналов утечки, амплитудных и фазовых шумов выполняется путем вычисления корреляций оцифрованного отраженного сигнала со стробами высоты и упреждения, последующего вычитания результата корреляции на задержке строба упреждения из результата корреляции на задержке строба высоты.
Формирование оценки высоты согласно способу предлагаемого изобретения происходит следующим образом. Формируется периодическая последовательность импульсов, модулирующая импульсы передатчика, период T=f1(τc) и длительность τu=f2(τc) которых выбрана по расчетной таблице в зависимости от кода задержки строба высоты τc, при этом период удовлетворяет условиям  где Hmax - максимально измеряемая высота полета ЛА, Fdmax - максимальная частота спектра сигнала на задержке, соответствующей переднему фронту отраженного от Земли сигнала, с - скорость света. Формируются два строба (высоты и упреждения) с длительностью, равной длительности импульса передатчика τu, при этом задержка строба высоты относительно импульсов передатчика τс пропорциональна коду задержки строба высоты, строб упреждения опережает строб высоты на длительность зондирующего импульса, т.е. τу=τс-τu. В соответствии с кодом задержки строба высоты τс по расчетной таблице определяется код и соответствующее ему напряжение регулировки усиления приемника Ryc=f3(τc). Производится когерентный прием отраженных сигналов в полосе 1/τг min с усилением, переносом на видеочастоту и получением квадратурных составляющих у(t)=s(t-τ)+ξ(f)+ν(t)=Rey(t)+jImy(f), где s(t) - модуляция зондирующего сигнала, ν(t) - низкочастотный коррелированный шум, представляющий сумму сигнала утечки сигнала передатчика в приемник с реакций приемника на сигнал утечки и отраженных от конструкций ЛА сигналов (амплитудные и фазовые шумы), ξ(t) - не коррелированный шум приемника в полосе 1/τu min. Квадратуры сигнала приемника Rey(t)u Imy(t) оцифровываются, после этого производится режекция сигнала утечки, амплитудных и фазовых шумов, вызванных мощными отражениями сигнала от конструкций ЛА, на задержке строба высоты τс путем вычисления: а) корреляции стробов высоты и упреждения с отраженным сигналом
где Hmax - максимально измеряемая высота полета ЛА, Fdmax - максимальная частота спектра сигнала на задержке, соответствующей переднему фронту отраженного от Земли сигнала, с - скорость света. Формируются два строба (высоты и упреждения) с длительностью, равной длительности импульса передатчика τu, при этом задержка строба высоты относительно импульсов передатчика τс пропорциональна коду задержки строба высоты, строб упреждения опережает строб высоты на длительность зондирующего импульса, т.е. τу=τс-τu. В соответствии с кодом задержки строба высоты τс по расчетной таблице определяется код и соответствующее ему напряжение регулировки усиления приемника Ryc=f3(τc). Производится когерентный прием отраженных сигналов в полосе 1/τг min с усилением, переносом на видеочастоту и получением квадратурных составляющих у(t)=s(t-τ)+ξ(f)+ν(t)=Rey(t)+jImy(f), где s(t) - модуляция зондирующего сигнала, ν(t) - низкочастотный коррелированный шум, представляющий сумму сигнала утечки сигнала передатчика в приемник с реакций приемника на сигнал утечки и отраженных от конструкций ЛА сигналов (амплитудные и фазовые шумы), ξ(t) - не коррелированный шум приемника в полосе 1/τu min. Квадратуры сигнала приемника Rey(t)u Imy(t) оцифровываются, после этого производится режекция сигнала утечки, амплитудных и фазовых шумов, вызванных мощными отражениями сигнала от конструкций ЛА, на задержке строба высоты τс путем вычисления: а) корреляции стробов высоты и упреждения с отраженным сигналом
б) результата режекции z(τc) как разность корреляций. сигнала со стробом высоты и стробом упреждения
z(τc)=u(τc)-u(τy)=S(τc)+Δξ(τc)+Δν(τc),
где  - сигнальная составляющая,
- сигнальная составляющая,
Δν - случайный узкополосный процесс с математическим ожиданием  и дисперсией
и дисперсией 
Vm(τc) - модуль комплексной амплитуды низкочастотного коррелированного шума,
Δξ - случайный широкополосный процесс с математическим ожиданием mΔξ=0 и дисперсией 
ρτнч - радиус корреляции низкочастотного процесса,
kτнч(Δτ) - коэффициент корреляции между выборками случайного процесса ν(t), отстоящими друг от друга на Δτ.
Степень режекции утечки и амплитудных шумов ν(t) оценивается N≥-20lg2πFнчшτu, дБ и в зависимости от ширины спектра Fнчш может быть больше 80 дБ. Последовательность из  отрежектированных сигналов z(n,τс) подвергается когерентному накоплению в полосовом фильтре с полосой ΔF и частотой настройки Fo,
отрежектированных сигналов z(n,τс) подвергается когерентному накоплению в полосовом фильтре с полосой ΔF и частотой настройки Fo,
где ΔF=Fdmax-Fmin,
Fmin - верхняя частота спектра низкочастотного шума, оставшегося после режекции. В результате полосовой фильтрации получим накопленный сигнал

где  - номер частоты настройки полосового фильтра,
- номер частоты настройки полосового фильтра,
N=]1/TΔF[ - число накапливаемых импульсов,
][ - целая часть числа.
Детектированием Z(τc) получают (вычисляют) оценку мощности полезного сигнала PZ(τc)=[ReZ(τc)]2+[ImZ(τc)]2, которая сравнивается с порогом обнаружения. Результат сравнения  используется для управления поиском и сопровождением сигнала высоты. При Q=0 производится перестройка кода высоты от минимального τcmin до максимального значения τcmax. При достижении кода верхнего уровня τcmax производится сброс кода в нуль, повтор цикла поиска от τcmin до τc, где обнаруживается сигнал высоты Q=1. С этого момента, пока существует признак захвата Q=1, управление кодом задержки строба высоты τc производится через вычисления сигнала ошибки Δco=Po-PZ(τc) и весового суммирования сигнала ошибки с предшествующим значением кода
используется для управления поиском и сопровождением сигнала высоты. При Q=0 производится перестройка кода высоты от минимального τcmin до максимального значения τcmax. При достижении кода верхнего уровня τcmax производится сброс кода в нуль, повтор цикла поиска от τcmin до τc, где обнаруживается сигнал высоты Q=1. С этого момента, пока существует признак захвата Q=1, управление кодом задержки строба высоты τc производится через вычисления сигнала ошибки Δco=Po-PZ(τc) и весового суммирования сигнала ошибки с предшествующим значением кода
τс(l)=τс(l-1)+kDΔсо,
где kD - масштабный коэффициент.
Код задержки строба высоты τc через функциональное табличное преобразование преобразуется в коды периода повторения Т=f1(τc), длительности импульса τu=f2(τc), задержки строба упреждения τy=τc-τu, управления усилением сигнала в приемнике Ryc=f3(τс), результата измерения высоты Н=f4(τc), отличающегося от кода τc на величину систематического сдвига показаний. В соответствии с кодами формируются импульсы модуляции передатчика с требуемым периодом повторения и длительностью, импульсы строба упреждения и строба высоты, аналоговое напряжение управления усилением приемника.
В качестве прототипа устройства, реализующего способ, взят радиовысотомер [3].
Сущность изобретения поясняется дальнейшим описанием и чертежами когерентного импульсно-доплеровского радиовысотомера малых высот, реализующего способ:
фиг.1 - структурная схема радиовысотомера,
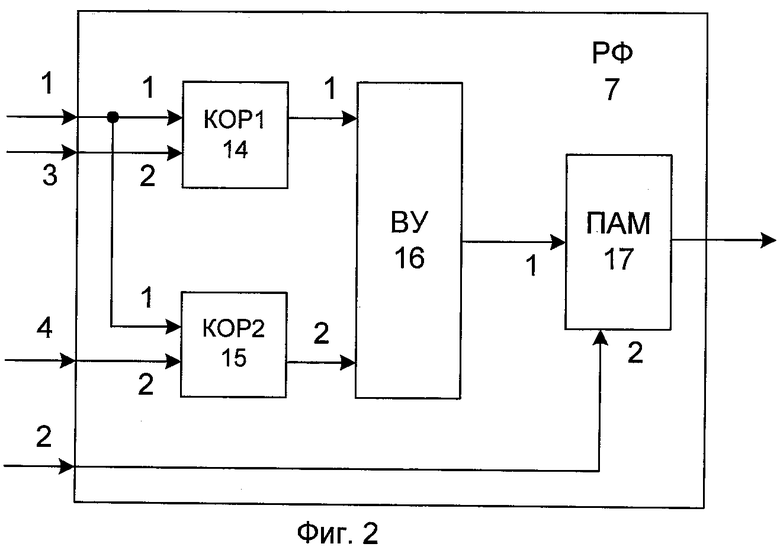
фиг.2 - структура режекторного фильтра (7) РФ,
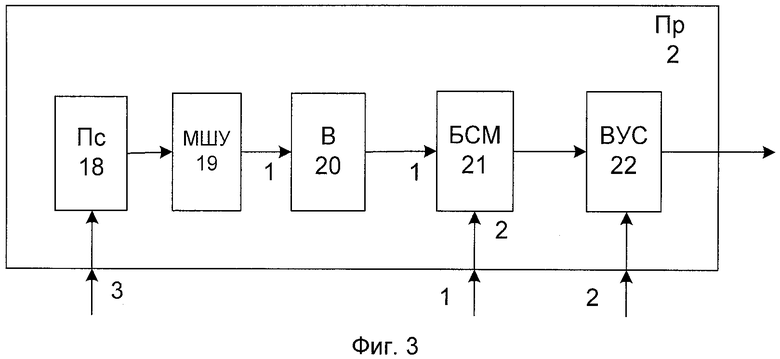
фиг.3 - структура приемника (2) ПР,
фиг.4 - структура передатчика (3) ПРД.
На фиг.1 представлена структурная схема радиовысотомера, на которой приняты следующие обозначения:
1 - антенная система (АС),
2 - одноканальный приемник (ПР),
3 - передатчик (ПРД),
4 - генератор частоты повторения и формирователь задержки стробов (ГЧПВЗ),
5 - аналого-цифровой преобразователь (АЦП),
6 - цифроаналоговый преобразователь (ЦАП),
7 - режекторный фильтр (РФ),
8 - полосовой фильтр (ПФ),
9 - детектор (Д),
10 - пороговый обнаружитель (ПО),
11 - блок поиска и сопровождения (БПС),
12 - функциональный преобразователь (ФП),
13 - блок управления (БУ).
В качестве антенной системы 1 предполагаются два варианта. Первый вариант с двумя антеннами передающей и приемной, находящимися в непосредственной близости, когда развязка передатчик - приемник больше или равна 30 дБ. Второй вариант с одной антенной, связанной с входом приемника и выходом передатчика через антенный переключатель (циркулятор), обеспечивающий развязку передатчик-приемник 15-20 дБ.
Генератор частот повторения и формирователь временных задержек 4 может быть выполнен на базе выпускаемых фирмой Altera программируемых логических интегральных схем [4].
Режекторный фильтр 7, полосовой фильтр 8, детектор 9, пороговый обнаружитель 10, блок поиска и слежения 11, функциональный преобразователь 12 и блок управления 13 могут быть выполнены как на базе единого бортового процессора [5], так и отдельных программируемых вычислительных модулей. В частности, функциональный преобразователь 12 может быть выполнен как ПЗУ, в котором зашиты таблицы преобразования входного кода задержки строба высоты в соответствующие коды управления периодом и длительностью зондирующих импульсов, в код управления длительностью строба высоты, соответствующего длительности зондирующего импульса, в код регулировки усиления приемника, обеспечивающего прием стробируемого сигнала в линейном режиме, и в код оценки измеренной высоты. Блок управления 13 осуществляет функцию интерфейса между узлами устройства и потребителем.
Импульсно-доплеровский радиовысотомер малых высот (фиг.1) содержит антенную систему 1, выход которой соединен с третьим (сигнальным) входом приемника 2, последовательно соединенные полосовой фильтр 8, детектор 9, пороговый обнаружитель 10, блок поиска и сопровождения 11, функциональный преобразователь 12, выход детектора 9 соединен с вторым входом блока поиска и сопровождения 11, последовательно соединенные генератор частоты повторения и формирователь временных задержек 4, передатчик 3, первый выход которого соединен с одноименным входом приемника 2, второй выход передатчика 3 соединен с входом антенной системы, отличается тем, что в него введены аналого-цифровой преобразователь (АЦП) 5, цифроаналоговый преобразователь (ЦАП) 6, режекторный фильтр 7 и блок управления 13, при этом выход приемника 2 последовательно через АЦП 5 и режекторный фильтр 7 соединен с входом полосового фильтра 8, третий выход блока управления 13 соединен шиной данных с входом генератора частоты повторения и формирователя временных задержек 4 и входом ЦАП 6, выход которого соединен с вторым входом приемника 2, четвертый, третий и второй выходы генератора частоты повторения и формирователя временных задержек 4 соединены с вторым, третьим и четвертым входами режекторного фильтра 4 соответственно, четвертый выход генератора частот повторения и формирователя временных задержек 4 соединен с вторым входом передатчика 3, выход функционального преобразователя 12 соединен с первым входом блока управления 13, второй вход-выход которого является входом-выходом радиовысотомера, через который осуществляется связь с потребителем.
На фиг.2 изображен режекторный фильтр 7 и приняты следующие обозначения:
14 - первый коррелятор (КОР 1),
15 - второй коррелятор (КОР 2),
16 - вычитающее устройство (ВУ),
17 - память (ПАМ).
На фиг.2 режекторный фильтр 7 содержит последовательно соединенные первый коррелятор 14, вычитающее устройство 16 и память 17, подключенную к выходу режекторного фильтра 7, второй коррелятор 15 соединен с вторым входом вычитающего устройства 16, при этом первый вход режекторного фильтра соединен с первыми входами первого 14 и второго 15 корреляторов, второй вход режекторного фильтра 7 соединен с вторым входом памяти 17, третий и четвертый входы режекторного фильтра 7 соединены с вторыми входами первого и второго корреляторов соответственно.
На фиг.3 приведена структура приемника 2, на которой приняты следующие обозначения.
18 - преселектор (Пс),
19 - малошумящий усилитель высокой частоты (МШУ),
20 - вентиль (В),
21 - балансный смеситель (БСМ),
22 - видеоусилитель (ВУС).
На фиг.3 третий вход приемника 2 через последовательно соединенные преселектор 18, МШУ 19, вентиль 20, балансный смеситель 21 и видеоусилитель 22 соединен с выходом приемника 2, первый вход приемника 2 соединен с вторым входом балансного смесителя 21, второй вход приемника 2 соединен с вторым входом видеоусилителя 22.
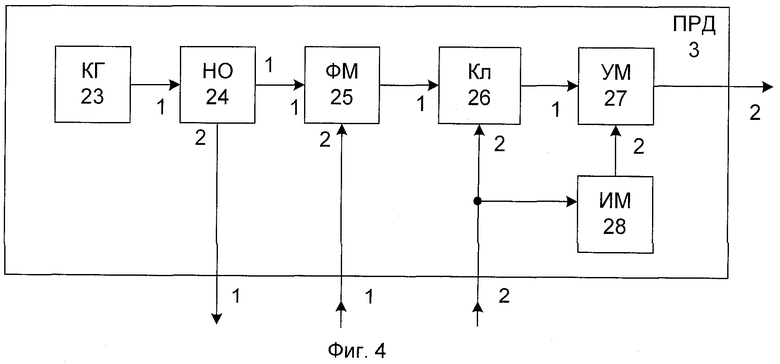
На фиг.4 приведена структура когерентного передатчика 3, в которой приняты следующие обозначения:
23 - когерентный гетеродин (КГ),
24 - направленный ответвитель (НО),
25 - фазовый манипулятор (ФМ),
26 - ключ (Кл),
27 - усилитель мощности (УМ),
28 - импульсный модулятор (ИМ).
В качестве ключа 26 может быть использован переключатель [7].
На фиг.4 когерентный гетеродин 23 через последовательно соединенные направленный ответвитель 24, фазовый манипулятор 25, ключ 26 и усилитель мощности 27 подключен к второму выходу передатчика 3, второй выход направленного ответвителя 24 соединен с первым выходом передатчика 3, второй вход которого соединен с вторым (управляющим) входом ключа 26 и через импульсный модулятор 28 - со вторым входом усилителя мощности 27, первый вход передатчика 3 соединен с вторым входом фазового манипулятора 25.
Работа радиовысотомера, изображенного на фиг.1, происходит в следующей последовательности. Генератор периода повторения и формирователь временных задержек 4 формирует на первом выходе импульсы, модулирующие период То и длительность τи СВЧ импульсов на втором выходе передатчика 3. На четвертом выходе генератора частоты повторения и формирователя временных задержек 4 формируется меандр, манипулирующий фазу СВЧ импульсов на третьем выходе передатчика 3 на 0 и π/2, с периодом Т=2То. Меандр поступает на второй вход передатчика 3 и на второй вход режекторного фильтра 7. В режекторном фильтре 7 меандр использован для череспериодной синхронизации приема квадратур сигнала; поступающего через АНН 5 с выхода одноканального приемника 2. На третьем и втором выходах генератора частоты повторения и формирователя временных задержек 4 формируются стробы высоты и упреждения длительностью τи,, равной длительности зондирующего сигнала, поступающие на третий и четвертый входы режекторного фильтра соответственно.
Опережение упреждающего строба τу относительно строба высоты τс равно длительности зондирующего импульса τи. С первого выхода передатчика 3 на одноименный вход одноканального приемника 2 поступает частота когерентного гетеродина. Напряжение регулировки усиления одноканального приемника 2 поступает с ЦАП 6 на второй вход одноканального приемника 2 и соответствует величине задержки строба высоты τс относительно зондирующего сигнала. СВЧ импульсы с второго выхода передатчика 3 поступают на вход антенной системы 1 и излучаются ею в направлении к Земле. Отраженный сигнал принимается антенной системой 1 и поступает на третий вход одноканального когерентного приемника 2, где после усиления и преобразования на видеочастоту поступает через АЦП 5 на первый вход режекторного фильтра 7, изображенного на фиг.2. В корреляторах 14 и 15 накапливается оцифрованный сигнал одноканального приемника в стробах высоты и упреждения соответственно с получением значений Re u(n,τс) и Re u(n,τy) в четный период повторения («0» значение меандра на втором входе режекторного фильтра) и значений Im u(n,τc) и Im u(n,τy) в нечетный период повторения («1» значение меандра на входе режекторного фильтра). Вычитающее устройство 16 последовательно с разделением во времени в течение периода меандра Т=2То формирует Re z(n,τc) и Im z(n,τc), которые запоминаются в памяти 17. Адреса Re и Im частей в памяти 17 модифицируются значением меандра на ее втором входе. Выходной сигнал памяти 17 режекторного фильтра 7 поступает в полосовой фильтр 8, где производится когерентное накопление полезного сигнала на частоте Fo в полосе ΔF с получением сигнала Z(τc). Детектор 9 по квадратурам Z(τс) вычисляет мощность полезного сигнала PZ(τc), которую сравнивают с порогом обнаружения в пороговом обнаружителе 10. Результат обнаружения Q управляет режимом работы блока поиска и сопровождения 11, синхронизация блока поиска и сопровождения 11 импульсами генератора частоты повторения и формирователя временных задержек 4 не показана. При Q=0 производится перестройка кода высоты от τcmin до τcmax. При достижении кодом τc верхнего уровня τcmax производится сброс кода в нуль, повтор цикла поиска от τcmin до τc, где обнаруживается сигнал высоты Q=1. С этого момента, пока существует Q=1, управление выходным кодом τc блока поиска и сопровождения 11 производится по сигналу детектора 9 PZ(τc). Функциональный преобразователь 12 по таблице преобразует код задержки строба высоты τc в коды периода повторения T=f1(τc), длительности импульса τu=f2(τc), задержки строба упреждения τу=τc-τu, управления усилением сигнала в одноканальном приемнике 2 Ryc=f3(τc) и результата измерения высоты H=f4(τc), выдаваемые через блок управления 13 в генератор периода повторения и формирователь временных задержек 4, ЦАП 6 и потребителю соответственно.
Работа одноканального когерентного приемника 2, изображенного на фиг.3, происходит следующим образом. Сигнал с выхода антенной системы 1 через третий вход одноканального приемника 2, последовательно соединенные преселектор 18, МШУ 19 и вентиль 20 поступает на первый вход балансного смесителя 21. На второй вход балансного смесителя 21 приходит гетеродинная частота, равная частоте зондирующего сигнала. Балансный смеситель 21 переносит принятый сигнал на нулевую промежуточную частоту, который далее усиливается в видеоусилителе 22 и поступает на выход одноканального приемника 2. Управление усилением одноканального приемника 2 происходит в видеоусилителе 22 внешним аналоговым сигналом, приходящим на его второй вход.
Работа передатчика 3, изображенного на фиг.4, происходит следующим образом. Когерентным гетеродином 23 формируется непрерывный СВЧ-сигнал, частота которого стабилизирована и соответствует несущей частоте зондирующего сигнала. Часть мощности сигнала через направленный ответвитель 24 выводится на первый выход передатчика 3 в качестве гетеродинной. Основная мощность когерентного гетеродина 23 через направленный ответвитель 24 поступает на первый вход фазового манипулятора 25, управляемого внешним сигналом (меандром на выходе генератора частот повторения и формирователя временных задержек 4), поступающим через первый вход передатчика 3. Манипуляция фазы производится на 0 и π/2. Из манипулированного по фазе непрерывного СВЧ-сигнала ключом 26, управляемым внешним импульсным сигналом, вырезается сигнал длительностью τи, который после усиления в усилителе мощности 27 поступает на второй выход передатчика 3. Усилитель мощности 27 модулируется импульсным модулятором 28, управляемым, как и ключ 26, общим сигналом длительностью τи, приходящим на второй вход передатчика 3
Изготовленный макет радиовысотомера и проведенные испытания подтвердили заявляемый результат - снижение минимума измеряемых высот ЛА до нуля.
Техническим преимуществом предлагаемого способа и устройства пред прототипом является возможность снижения минимально измеряемой высоты до нуля при высоком уровне утечки зондирующего сигнала в сторону приемника через антенную систему и отсутствии временной развязки приема и передачи, при наличии высокого уровня сигналов, отраженных от неподвижных конструкций ЛА (амплитудных и фазовых низкочастотных шумов).
Предлагаемое решение позволяет: а) существенно снизить разнесение приемной и передающей антенн высотомера вплоть до их касания (вариант с двумя антеннами), либо (второй вариант с несколько меньшей развязкой каналов приема и передачи) использовать общую на передачу и прием антенну, связанную с приемником и передатчиком через антенный переключатель (циркулятор), б) существенно упростить получение квадратурных составляющих сигнала за счет совместного использования одноканального когерентного приемника и передатчика, СВЧ-сигнал которого череспериодно манипулируется по фазе на 0 и π/2. Это обеспечивает идентичность квадратурных каналов приема по амплитуде и фазе, пренебрежимо малую погрешность ортогональности квадратурных составляющих сигнала на выходе приемника при простоте технической реализации. При снижении ЛА за счет программного увеличения ширины спектра и скважности зондирующего сигнала до максимально допустимой обеспечивается снижение средней мощности излучения во всем диапазоне рабочих высот (в прототипе она постоянна в диапазоне от 5000 до 50 футов), соответственно повышается скрытность работы радиовысотомера, в) корреляционный прием сигнала в стробе, согласованном с длительностью зондирующего, позволяет повысить потенциал связи радиовысотомера, соответственно поднять потолок измеряемых высот по сравнению с прототипом.
На основании приведенного описания и чертежей предлагаемое устройство высотомера, реализующего. предлагаемый способ, может быть изготовлено при использовании известных комплектующих изделий известного в радиоэлектронной промышленности технологического оборудования и использовано на скоростных ЛА, не использующих режим зависания, для обеспечения маловысотного полета над поверхностью Земли.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЦИФРОВАЯ АКТИВНАЯ ФАЗИРОВАННАЯ АНТЕННАЯ РЕШЕТКА | 2015 |
|
RU2608637C1 |
| РАДИОЛОКАЦИОННЫЙ ИМПУЛЬСНЫЙ РЕЦИРКУЛЯЦИОННЫЙ РАДИОВЫСОТОМЕР | 2004 |
|
RU2282211C2 |
| СПОСОБ ОБНАРУЖЕНИЯ И КЛАССИФИКАЦИИ НАДВОДНЫХ ЦЕЛЕЙ | 2005 |
|
RU2287840C1 |
| РАДИОВЫСОТОМЕР С ЧАСТОТНО-МОДУЛИРОВАННЫМ ЗОНДИРУЮЩИМ СИГНАЛОМ | 2012 |
|
RU2519952C2 |
| ИМПУЛЬСНЫЙ РАДИОВЫСОТОМЕР | 2004 |
|
RU2258943C1 |
| ИМПУЛЬСНЫЙ РАДИОВЫСОТОМЕР | 2012 |
|
RU2519914C2 |
| РАДИОДАТЧИК ВЫСОТЫ | 2007 |
|
RU2336540C1 |
| РАДИОВЫСОТОМЕР | 2001 |
|
RU2212684C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ И УСТРОЙСТВО РАДИОВЫСОТОМЕРА С НЕПРЕРЫВНЫМ ЛЧМ СИГНАЛОМ, ИСПОЛЬЗУЮЩЕГО СПОСОБ | 2013 |
|
RU2550082C1 |
| РЕЦИРКУЛЯЦИОННЫЙ РАДИОВЫСОТОМЕР | 2004 |
|
RU2273862C1 |
Предлагаемое изобретение относится к радиолокационной технике и может быть использовано в импульсно-доплеровских высотомерах или импульсно-доплеровских дальномерах при измерениях высот или дальностей, в том числе работающих на одну антенну в отсутствие временной развязки передатчик-приемник. Достигаемый технический результат - снижение минимально измеряемой высоты в импульсно-доплеровском радиовысотомере до нуля. Указанный результат достигается тем, что в импульсно-доплеровском радиовысотомере используется простой импульсный зондирующий сигнал с перестраиваемыми от задержки строба дальности периодом и длительностью, при приеме отраженного сигнала на задержке строба дальности программно обеспечивается линейный режим работы приемника, перед когерентным накопленем сигнала (доплеровской фильтрацией) производится режекция сигналов утечки зондирующего сигнала и низкочастотных коррелированных шумов за счет оцифровки квадратурных составляющих сигнала, корреляции оцифрованного сигнала со стробом дальности и упреждения, вычитания результата корреляции на задержке строба упреждения из результата корреляции на задержке строба дальности. При этом опережение строба упреждения относительно строба дальности равно длительности зондирующего сигнала. 2 н. и 2 з.п. ф-лы, 4 ил.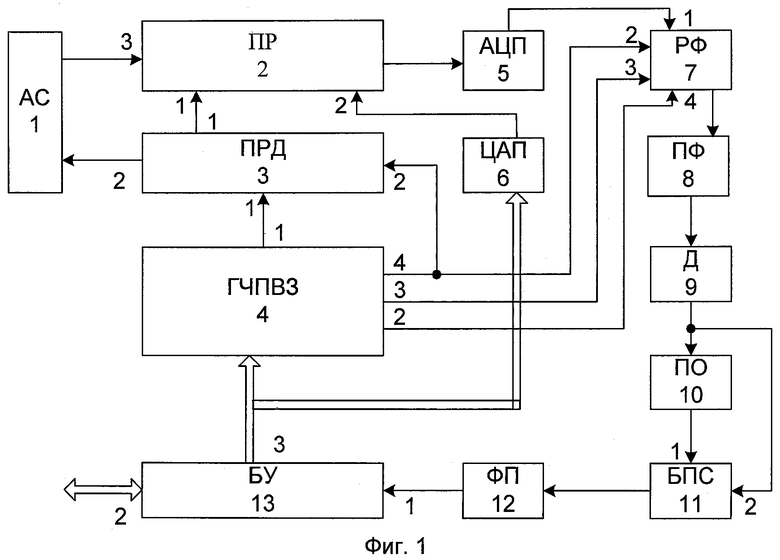
1. Способ снижения нижней границы измерения малых высот до нуля, включающий когерентное излучение простого импульсного сигнала с перестраиваемой по высоте длительностью и периодом повторения, когерентный прием отраженного сигнала с получением квадратурных составляющих на видеочастоте, когерентное накопление сигнала на задержке строба высоты в полосе доплеровских частот сигнала, отраженного от Земли, превышающих верхнюю границу низкочастотных коррелированных шумов, детектирование квадратурного сигнала путем вычисления мощности сигнала по квадратурным составляющим, пороговое обнаружение, по результатам которого и последующего детектирования формируется код задержки строба высоты, пропорциональный задержке строба относительно зондирующего сигнала при поиске и сопровождении, функциональное преобразование кода задержки строба высоты в соответствующие коды управления периодом и длительностью зондирующих импульсов, код управления длительностью строба высоты, соответствующего длительности зондирующего импульса и кода оценки измеренной высоты, формирование импульсов модуляции зондирующего сигнала и строба высоты с периодом и длительностью, соответствующим кодам управления, полученным в результате функционального преобразования, отличающийся тем, что введены дополнительное функциональное преобразование кода задержки строба высоты в сигнал регулировки усиления приемника, обеспечивающего прием стробируемого сигнала в линейном режиме, формирование строба упреждения, опережающего строб высоты на длительность зондирующего сигнала и равного ему, аналого-цифрового преобразования сигнала приемника с последующей режекцией сигналов утечки, амплитудных и фазовых шумов на задержке строба высоты в сигналах, подвергаемых когерентному накоплению.
2. Способ по п.1, отличающийся тем, что режекция сигналов утечки, амплитудных и фазовых шумов выполняется путем вычисления корреляций оцифрованного отраженного сигнала со стробами высоты и упреждения, последующего вычитания результата корреляции на задержке строба упреждения из результата корреляции на задержке строба высоты.
3. Импульсно-доплеровский радиовысотомер малых высот, реализующий способ по п.1, содержащий антенную систему, выход которой соединен с третьим входом приемника, последовательно соединенные полосовой фильтр, детектор, пороговый обнаружитель, блок поиска и сопровождения, формирующий код задержки строба высоты, функциональный преобразователь, преобразующий код задержки строба высоты в соответствующие коды периода и длительности зондирующих импульсов, длительности строба высоты, выход детектора соединен с вторым входом блока поиска и сопровождения, последовательно соединенные генератор частоты повторения и формирования временных задержек, передатчик, первый выход которого соединен с одноименным входом приемника, сверхвысокочастотные (СВЧ) импульсы с второго выхода передатчика поступают на вход антенной системы, отличающийся тем, что в него введены аналого-цифровой преобразователь (АЦП), цифроаналоговый преобразователь (ЦАП), режекторный фильтр и блок управления, при этом функциональный преобразователь дополнительно преобразует код задержки строба высоты в код регулировки усиления приемника, выход приемника последовательно через АЦП и режекторный фильтр соединен с входом полосового фильтра, третий выход блока управления соединен шиной данных с входом генератора частоты повторения и формирования временных задержек и с входом ЦАП, выход которого соединен с вторым входом приемника, четвертый, третий и второй выходы генератора частоты повторения и формирования временных задержек соединены с вторым, третьим и четвертым входами режекторного фильтра соответственно, четвертый выход генератора частоты повторения и формирования временных задержек соединен с вторым входом передатчика, выход функционального преобразователя соединен с первым входом блока управления, предназначенного для выдачи соответствующих результатов преобразования в генератор частоты повторения и формирования временных задержек, в ЦАП и потребителю, второй вход-выход блока управления является входом-выходом радиовысотомера, через который осуществляется связь с потребителем.
4. Импульсно-доплеровский радиовысотомер малых высот по п.3, отличающийся тем, что режекторный фильтр содержит последовательно соединенные первый коррелятор, вычитающее устройство и память, подключенную к выходу режекторного фильтра, второй коррелятор соединен с вторым входом вычитающего устройства, при этом первый вход режекторного фильтра соединен с первыми входами первого и второго корреляторов, второй вход режекторного фильтра соединен с вторым входом памяти, третий и второй входы режекторного фильтра соединены с вторыми входами первого и второго корреляторов соответственно.
| US 3739379 А, 12.06.1973 | |||
| УСТРОЙСТВО ПРЕДУПРЕЖДЕНИЯ ОБ ОПАСНОМ УГЛЕ ТАНГАЖА ДЛЯ УЛУЧШЕННОЙ СИСТЕМЫ ПРЕДУПРЕЖДЕНИЯ ОПАСНОГО СБЛИЖЕНИЯ С ЗЕМЛЕЙ (УСПОС) | 2002 |
|
RU2282157C2 |
| СПОСОБ ИЗМЕРЕНИЯ СВЕРХМАЛОЙ ВЫСОТЫ ПОЛЕТА САМОЛЕТА, ПРЕИМУЩЕСТВЕННО ГИДРОСАМОЛЕТА, НАД ВОДНОЙ ПОВЕРХНОСТЬЮ И ПАРАМЕТРОВ МОРСКОГО ВОЛНЕНИЯ | 1999 |
|
RU2183010C2 |
| ЧАСТОТНЫЙ РАДИОВЫСОТОМЕР | 2006 |
|
RU2313107C1 |
| EP 1782095 A2, 09.05.2007 | |||
| Уплотнительный подвижный узел для поршней силовых гидроцилиндров | 1990 |
|
SU1798568A1 |
| WO 2007038068 A2, 05.04.2007 | |||
| US 5486821 А, 23.01.1996. | |||

