Изобретение относится к контрольно-измерительной технике, в частности к устройствам и приспособлениям к измерительным устройствам для проверки соосности деталей, и может быть использовано при монтаже паровых турбин.
Патентный поиск по выявлению устройств, аналогичных предлагаемому устройству для контроля соосных деталей, выявил следующее.
Известно устройств для контроля соосности деталей с применением зрительной трубы [1] . В данном случае зрительную трубу используют при проведении работ по выверке корпусных деталей и центровке проточной части. На горизонтальный разъем у торца цилиндра со стороны генератора устанавливают специальный кронштейн, на котором устанавливают штатив для крепления и выверки зрительной трубы ППС-11, в частности, в положение для выполнения измерения взаимного положения центров расточек. Если наблюдаемая точка не совпадает с визирной линией трубы, то ее изображение в плоскости сетки смещено по отношению к перекрестью. Для определения величины этого смещения зрительную трубу снабжают оптическим микрометром, с помощью которого можно определить величину смещения этой точки относительно визирной линии.
Недостатком устройства для контроля соосности деталей с помощью зрительной трубы является большая степень зависимости точности измерения от прямолинейности визирной линии (базовой оси) за пределами трубы, которая в свою очередь зависит от внешних условий измерений и не устраняется средствами устройства. Стабильность положения визирной линии за пределами трубы нарушается, если в пределы усеченного конуса, который создается между визируемым предметом и объективом трубы, попадает посторонний предмет. При этом часть лучей, идущих от предмета к объективу, может быть срезана и изображение сместится относительно перекрестья из-за сферической аберрации объектива. Кроме того, на стабильность положения визирной линии влияет постоянство плотности воздуха на протяжении всего усеченного конуса. Неоднородность среды на линии визирования является одной из причин значительного увеличения погрешности измерения, так как при этом изображение смещается от своего истинного положения.
Таким образом, известное устройство для контроля соосности деталей при его осуществлении не позволяет достичь технического результата, заключающегося в повышении точности измерения и достоверности контроля путем стабилизации пространственного положения базовой оси.
Наиболее близким к предлагаемому устройству является устройство для контроля соосных деталей, содержащее три центроискателя, центрирующие опоры которых закреплены в расточках, лазерный излучатель с кольцевой структурой луча, рабочий и контрольный приемники. Лазерный излучатель установлен в соответствующий центроискатель и кинематически связан с механизмом отклонения лазерного луча. Рабочий и контрольный приемники представляют собой видиконы телекамер и установлены в центроискатели в соответствующих двухкоординатных механизмах перемещения. Устройство обеспечивает повышение точности контроля несоосности благодаря кольцевой структуре луча лазерного излучателя, а также возможности получения увеличенного изображения луча [2].
Недостаток известного устройства заключается в следующем. В известном устройстве наведение луча осуществляется механизмом наведения, кинематически связанным с лазерным излучателем, установленным в центроискателе. Это затрудняет наведение луча при установке базовой оси, поскольку прикосновение к центроискателю вызывает уход луча, нарушает стабильность его пространственного положения, а следовательно и стабильность пространственного положения базовой оси. Это вносит погрешность в результаты измерений и снижает достоверность контроля. Кроме того, для исключения ошибки измерения, связанной с непараллельностью осей центров центроискателей с расположенными в них приемниками излучения (рабочим и контрольным) оси луча лазерного излучателя, необходимо располагать приемные элементы в плоскости ножек центроискателей. В известном устройстве это неосуществимо из-за существенных габаритных размеров телекамер.
Таким образом, известное техническое решение при его осуществлении не позволяет достичь технического результата, заключающегося в повышении точности измерений и достоверности контроля соосности деталей, путем обеспечения стабилизации пространственного положения базовой оси.
Проведенный патентный поиск по выявлению устройств, аналогичных заявляемому центроискателю, используемому в предлагаемом изобретении "Устройство для контроля соосности деталей", выявил следующее.
Известен центроискатель для нахождения центра неполной цилиндрической поверхности [3], содержащий корпус с четырьмя базовыми опорами и цилиндрическую оправку с целевым знаком. Торцовая поверхность корпуса выполнена базирующей, перпендикулярной линии базовых опор. Узел центрирования цилиндрической оправки содержит два подвижных центрирующих звена, каждое из которых снабжено двумя сферическими опорами. Центрирующие звенья подвижно сопряжены боковыми плоскостями с базирующей торцовой поверхностью корпуса, перпендикулярной линии базовых опор. Измерительное усилие сферических опор обеспечивают винтовые пружины, а прижатие цилиндрической оправки к центрирующим плоскостям подвижных центрирующих звеньев обеспечивают пластинчатые пружины.
Недостаток известного устройства состоит в том, что достижение требуемой точности обеспечивается усложнением конструкции, кроме того, устройство позволяет использовать его только для установки в узлы одного вполне определенного диаметра, что ограничивает его функциональные возможности.
Таким образом, известный центроискатель при его осуществлении не позволяет достичь технического результата, заключающегося в обеспечении требуемой точности при одновременном упрощении конструкции, а также в возможности изменения рабочей длины подвижных центрирующих звеньев - ножек центроискателя, что сужает его функциональные возможности.
Наиболее близким к предлагаемому является центроискатель [4], содержащий направляющий цилиндр, совмещенный с массивным жестким фланцем. На направляющий цилиндр надет конус с возможностью перемещения по направляющей цилиндра посредством распложенных между их поверхностями шариков. Фланец с направляющим цилиндром установлен в корпусе, в котором выполнены три радиально расположенных отверстия, в которые плотно входят направляющие ножек центроискателя, которые расположены внутри направляющих. Направляющие обеспечивают расположение ножек в одной плоскости, перпендикулярной оси конуса (оси цилиндра). Нижняя ножка центроискателя расположена вертикально, а две боковые - под углом 2o к горизонту. Ножки всегда прижаты к образующей конуса пружинами сжатия через однорядные радиальные шарикоподшипники.
Конструкция центроискателя позволяет производить одновременное и одинаковое перемещение концов трех центрирующих опор. В положение наименьшего диаметра опоры устанавливают нажатием наружного рычага усилием руки. При этом конус через систему внутренних рычагов перемещают в крайнее первоначальное положение. При освобождении наружного рычага конус перемещается в обратном направлении и выдвигает ножки центроискателя. Путем наращивания ножек изменяют диапазон рабочих диаметров центроискателя.
Недостаток известного устройства заключается в том, что требуемую точность устройства получают путем усложнения конструкции. Наличие сложных узлов и деталей, требующих высокой точности изготовления и чистоты поверхности, сложности в точностной установке, обуславливает внесение погрешностей в точность центроискателя. В частности, применение контакта ножек центроискателя с конусом через шарикоподшипники требует точной выверки ножек центроискателя относительно образующей конуса, так как наружная обойма подшипника должна находиться в плоскости, проходящей через ось конической поверхности. В противном случае при одинаковой длине ножек их свободные концы будут находиться на разных расстояниях от этой оси, что приведет к погрешности при использовании центроискателя по прямому назначению. Кроме того, наличие осевых условий, перемещающих конус, при их превышении вызывает возникновение сжимающих усилий в вертикальной ножке центроискателя, которые приподнимают весь центроискатель. Большие усилия в боковых ножках могут привести к значительным контактным напряжениям и деформации сферических поверхностей.
Конструкция известного центроискателя в своей основе предполагает использование таких тяжелых материалов, как сталь. Кроме того, конструкция содержит силовые элементы. Все это обуславливает большой вес конструкции.
Таким образом, известный центроискатель при его осуществлении не позволяет достичь технического результата, заключающегося в достижении требуемой точности при одновременном упрощении конструкции, а также в снижении веса.
Патентный поиск по выявлению технических решений, аналогичных предлагаемому механизму наведения, используемому в заявляемом устройстве для контроля соосности деталей, показал следующее.
Известен магнитный держатель, содержащий полый цилиндрический корпус с рукояткой, размещенный коаксиально корпусу стержень с электрообмоткой, одним концом взаимодействующий с деталью [5].
Наиболее близким к предлагаемому механизму наведения, используемому в заявляемом устройстве для контроля соосности деталей, является магнитный держатель, содержащий полый цилиндрический корпус с рукояткой, размещенный коаксиально корпусу стержень с электрообмоткой, одним концом взаимодействующий с деталью. Кроме того, магнитный держатель снабжен микрометрическим винтом, стержень размещен с возможностью возвратно-поступательного перемещения вдоль своей оси, в рукоятке выполнено соосное стержню отверстие, в которое установлен микрометрический винт, соединенный с другим концом стержня [6].
Известные устройства используют в качестве механизмов наведения для установки деталей в технологические отверстие и их закрепления в них, а также для установки и крепления деталей к поверхностям.
Недостаток известных магнитных держателей заключается в снижении усилия притяжения из-за снижения коэффициента полезного действия магнитной цепи, поскольку большая часть энергии магнитного поля замыкается помимо устанавливаемой детали. В результате снижается надежность крепления детали к сопрягающейся с ней поверхности.
Кроме того, прототип имеет ограниченные возможности по точности установки детали, так как стандартный микровинт позволяет установить деталь с точностью до 0,01 мм, что не позволяет повысить точность известного механизма наведения. Необходимость стационарного источника питания в прототипе лишает известные механизмы наведения такого свойства, как автономность.
Таким образом, известные устройства не позволяют достичь технического результата, заключающегося в повышении надежности крепления детали к опрягающейся с ней поверхности, в повышении точности установки детали, а также в обеспечении автономности устройства.
Изобретение "Устройство для контроля соосности деталей" решает задачу создания такого устройства, которое при его осуществлении позволяет достичь технического результата, заключающегося в повышении точности измерений и достоверности результатов контроля путем стабилизации пространственного положения базовой оси.
Суть изобретения заключается в том, что в устройство для контроля соосности деталей, содержащее лазерный излучатель с кольцевой структурой луча, контрольный и рабочий приемники излучения и три центроискателя с тремя ножками каждый, в которых размещены соответственно лазерный излучатель, контрольный приемник и рабочий приемник излучения, причем рабочий приемник размещен в центроискателе подвижно, введены первый, второй и третий механизмы наведения, при этом лазерный излучатель и контрольный приемник размещены в соответствующих центроискателях неподвижно, ножки центроискателя излучателя закреплены в контролируемом узле посредством соответствующих механизмов наведения с возможностью горизонтального перемещения, а ножки центроискателей рабочего и контрольного приемников закреплены неподвижно в контролируемой детали и в контролируемым узле, соответственно. При этом ножки центроискателей приемников закреплены в контролируемой детали и в контролируемом узле посредством магнитных прихваток.
Технический результат достигается следующим образом. Выполнение лазерного излучения с кольцевой структурой луча обеспечивает сохранение технического результата, достигаемого в прототипе - достигаемой точности измерений.
Поскольку ножки центроискателя лазерного излучателя закреплены в контролируемом узле посредством механизмов наведения с возможностью горизонтального перемещения, обеспечивается возможность поворота корпуса центроискателя в двух направлениях. При этом, благодаря тому, что излучатель размещен в центроискателе неподвижно, обеспечивается возможность установки базовой оси без изменения положения излучателя в центроискателе. В результате обеспечивается стабильность пространственного положения луча излучателя относительно центра центроискателя во время изменения пространственного положения последнего. Это исключает возможность внесения ошибки при установки базовой оси за счет нестабильности пространственного положения излучателя относительно центра его центроискателя, повышает точность установки базовой оси, а следовательно, и точность измерений и достоверность результатов контроля.
Неподвижное закрепление в соответствующем центроискателе контрольного приемника излучения, а также неподвижное закрепление самого центроискателя в контролируемом узле обеспечивают стабильность установленного пространственного положения базовой оси, что также повышает точность измерений и достоверность результатов контроля.
Закрепление рабочего приемника излучения в соответствующем центроискателе подвижно позволяет, не изменяя первоначальной установки центроискателей излучателя и контрольного приемника, т.е. не нарушая условий, при которых выставлена базовая ось, выполнить измерение несоосности. Причем выполнение этих условий позволяет считать, что отсчет показаний идет относительно базовой оси. Неподвижная установка центроискателя рабочего приемника излучения, а также стабильность начальных условий установки базовой оси повышает точность результатов измерений и достоверность контроля.
Таким образом, предлагаемое устройство для контроля соосности деталей при его осуществлении позволяет достичь технического результата, заключающегося в повышении точности измерений и достоверности контроля.
Предлагаемое изобретение "Центроискатель", используемое в заявляемом изобретении "Устройство для контроля соосности деталей" решают задачу создания центроискателя, который при его осуществлении позволяет достичь технического результата, заключающегося в достижении требуемой точности при одновременном упрощении конструкции, а также снижении веса.
Суть изобретения заключается в том, что в центроискателе, содержащем корпус, в котором соосно расположен цилиндр, три ножки, каждая из которых содержит направляющую, жестко закрепленную в корпусе в соответствующем радиальном отверстии, при этом направляющие расположены в плоскости, перпендикулярной оси цилиндра, причем нижняя направляющая расположена вертикально, а две боковые - под углом 2 - 3o к горизонту, цилиндр расположен в корпусе в подшипниках, а ножки центроискателя надеты на соответствующие направляющие с возможностью осевого перемещения и соединены с цилиндром посредством плоских тяг, для которых в корпусе выполнены соответствующие отверстия и которые одним концом присоединены к цилиндру посредством сферических подшипников, установленных радиально на одной и той же окружности сечения цилиндра, вторым концом тяги жестко соединены с соответствующей ножкой центроискателя, при этом второй конец тяги выполнен с возможностью поперечного изгиба.
Технический результат достигается следующим образом. Благодаря тому, что ножки центроискателя надеты на направляющие, каждая из которых жестко закреплена в радиальном отверстии в корпусе центроискателя и расположена в плоскости, перпендикулярной оси цилиндра, расположенного в корпусе соосно, ножки центроискателя всегда находятся в плоскости, перпендикулярной оси цилиндра. Установка цилиндра в подшипники обеспечивает возможность его вращения вокруг совей оси. Возможность осевого перемещения ножек относительно направляющих, а также их соединение с цилиндром посредством плоских тяг, для которых в корпусе выполнены соответствующие отверстия, обеспечивает одновременное смещение трех ножек цетроискателя при смещении одной из них. При этом, поскольку точки присоединения тяг к цилиндру расположены радиально на одной и той же окружности, концы ножек центроискателя при их перемещении по направляющим всегда находятся на одинаковом расстоянии от оси цилиндра. В результате исключается возможность несимметричного расположения концов ножек относительно центра центроискателя, что обеспечивает точность. Крепление плоских тяг к цилиндру посредством сферических подшипников позволяет исключить радиальное перемещение ножек центроискателя относительно направляющих, что также повышает точность центроискателя. Выполнение второго конца плоской тяги с возможностью поперечного изгиба обеспечивает возможность продольного смещения ножки центроискателя относительно его центра.
Отсутствие в конструкции центроискателя силовых элементов позволяет выполнить все детали центроискателя из легких сплавов и тем самым значительно снизить вес изделия.
Таким образом, предлагаемый центроискатель, используемый в заявляемом изобретении "Устройство для контроля соосности деталей", при его осуществлении позволяет достичь технического результата, заключающегося в достижении требуемой точности при одновременном упрощении конструкции, а также в снижении веса.
Предлагаемое изобретение "Механизм наведения", используемое в заявляемом устройстве для контроля соосности деталей, решает задачу создания механизма наведения, который при его осуществлении позволяет достичь технического результата, заключающегося в повышении надежности крепления детали, в повышении точности, а также в обеспечении автономности устройства.
Суть изобретения заключается в том, что в механизме наведения, включающем полый корпус, якорь из ферромагнитного материала, размещенный в корпусе соосно с возможностью осевого перемещения и взаимодействия рабочим концом с деталью, рукоятку грубой наводки, взаимодействующую с расположенным в корпусе винтом, который взаимодействует одним концом с якорем и расположен с ним соосно, на взаимодействующем с якорем конце винта выполнена резьба с шагом, меньше шага резьбы рукоятки грубой наводки, а в якоре выполнена глухая резьбовая проточка, а также введена рукоятка точной наводки, жестко закрепленная на другом конце винта, при этом рукоятка грубой наводки размещена на корпусе с возможностью вращения вокруг своей оси, а второй конец якоря, размещенный в корпусе, подпружинен, кроме того, корпус со стороны второго конца якоря жестко соединен с упором, выполненным из ферромагнитного материала, в верхней части которого выполнено отверстие для якоря и установлен введенный ограничитель его радиального перемещения, а в нижней части упора размещен магнит таким образом, что один из его полости совпадает с плоскостью прижима упора.
Технический результат достигается благодаря тому, что магнитное поле магнита механизма наведения практически полностью замыкается через устанавливаемую деталь, что повышает КПД магнитной цепи и увеличивает усилие притяжения, а следовательно, повышает надежность крепления детали. Это достигается тем, что в механизме наведения использован магнит, который размещен в нижней части упора, выполненного из ферромагнитного материала, таким образом, что один из его полюсов совпадает с плоскостью прижима упора. Последнее обеспечивает плотность прижима упора к поверхности узла. Благодаря тому, что корпус механизма наведения жестко соединен с упором, в верхней части которого выполнено отверстие для якоря, изготовленного из ферромагнитного материала, рабочий конец которого имеет возможность взаимодействия с деталью, при соединении якоря с деталью магнитные силовые линии противоположных полюсов магнита замыкаются через деталь и узел, в который эту деталь устанавливают, плотно прижимая деталь магнитным полем к якорю и узлу. Благодаря тому, что второй конец якоря, расположенный в корпусе, подпружинен, а в верхней части упора выполнен ограничитель радиального перемещения якоря, в механизме практически исключен люфт и исключено перемещение якоря в радиальном направлении, что обеспечивает стабильность положения установленной детали, а следовательно, повышает точность механизма наведения. Поскольку якорь размещен в корпусе с возможностью осевого перемещения, инициируемого рукоятками грубой и точной наводки, которые взаимодействуют с одним и тем же винтом, имеющим две резьбы с разным шагом, причем рукоятка грубой наводки размещена на корпусе механизма с возможностью вращения вокруг своей оси, а рукоятка точной наводки размещена на свободном конце винта, то при вращении рукоятки грубой наводки якорь перемещается в осевом направлении на расстояние, соответствующее шагу резьбы рукоятки грубой наводки, а при вращении рукоятки точной наводки - на разницу шагов резьбы рукоятки грубой наводки и резьбы, выполненной на взаимодействующем с якорем конце винта. При этом, подбирая разность резьб, можно получить точность наведения, превышающую точность наведения, получаемую с помощью стандартного микрометрического винта, что также повышает точность предлагаемого механизма наведения.
Отсутствие необходимости в источнике электропитания обеспечивает автономность предлагаемого механизма наведения.
Таким образом, предлагаемый механизм наведения, используемый в заявляемом изобретении "Устройство для контроля соосности деталей", при его осуществлении позволяет достичь технического результата, заключающегося в повышении надежности крепления детали, повышении точности и обеспечении автономности механизма наведения.
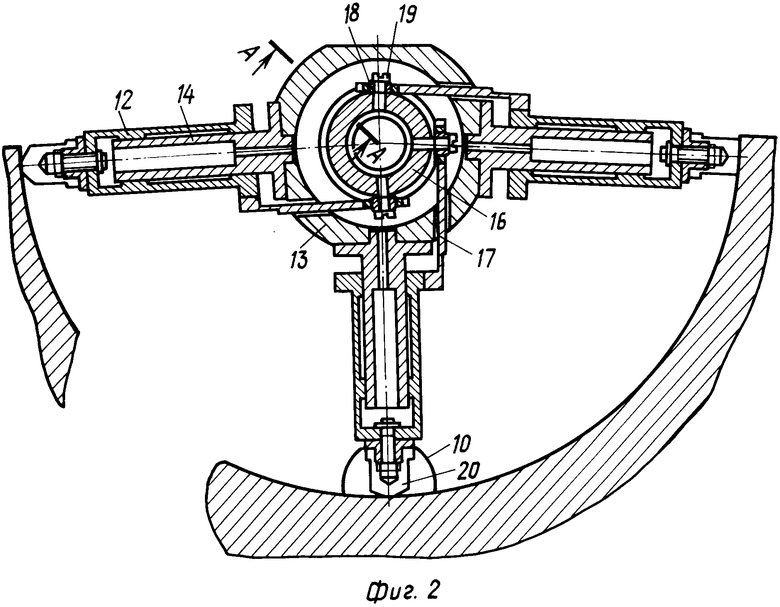
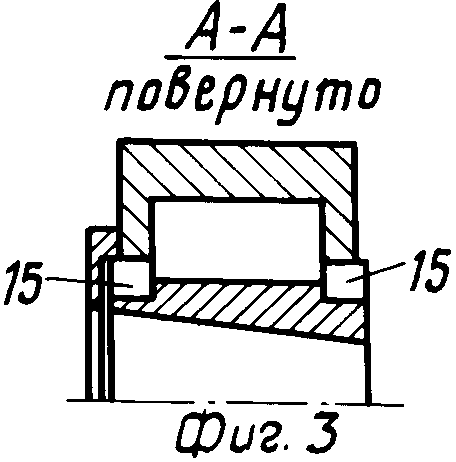
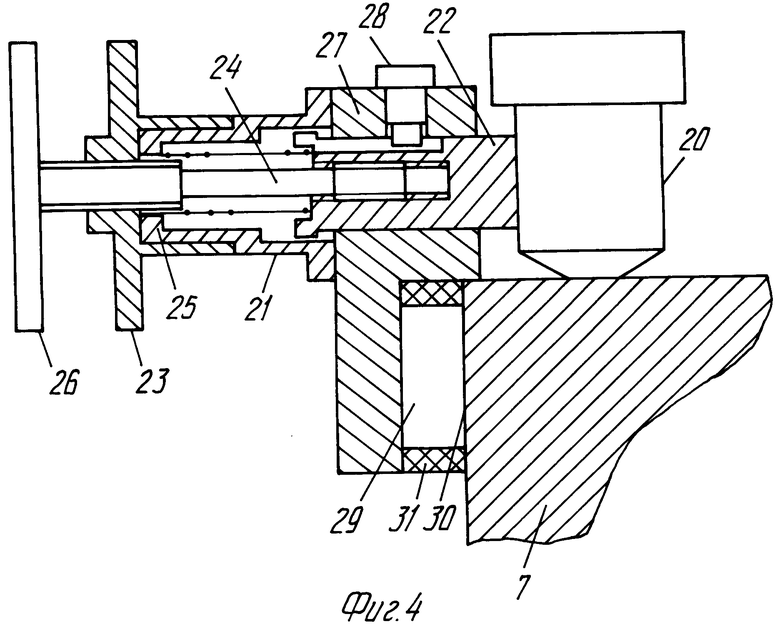
На фиг. 1 схематично изображено устройство для контроля соосности деталей; на фиг.2 - центроискатель, установленный в контролируемый узел; на фиг. 3 - вертикальный разрез А-А на фиг. 2; на фиг.3 - механизм наведения (вертикальный разрез), закрепляющий ножку центроискателя в расточке контролируемого узла.
Устройство для контроля соосности деталей содержит три центроискателя 1, 2, 3, лазерный излучатель 4 с кольцевой структурой луча, контрольный приемник 5 излучения и рабочий приемник 6 излучения. Первый 1 и второй 2 центроискатели размещены в соответствующих контрольных расточках 7 и 8 контролируемого узла, а третий центроискатель 3 размещен в расточке 9 контролируемой детали узла. В центроискателях 1, 2, 3 соответственно размещены лазерный излучатель 4, контрольный приемник 5 и приемник 6 излучения. Лазерный излучатель 4 и контрольный приемник 5 размещены к центроискателях 1 и 2 неподвижно, а рабочий приемник 6 размещен в цетроискателе 3 подвижно, например, посредством механизма двухкоординатного перемещения. Механизм двухкоординатного перемещения может быть выполнен аналогично описанному в авт. свид. СССР N 913034, кл. G 01 B 5/24, 15.03.82. Кроме того, устройство содержит три механизма 10 наведения и магнитные прихватки 11. Ножки 12 центроискателя 1 закреплены в контрольной расточке 7 посредством механизмов 10 наведения с возможностью горизонтального перемещения, а ножки центроискателей 2 и 3 - посредством магнитных прихваток 11 неподвижно. Магнитные прихватки 11 представляют собой магниты, выполненные в форме буквы Г. Вертикальной частью прихватки 11 крепят к торцу расточки, а конец горизонтальной полочки взаимодействует с ножкой 12 центроискателя.
Центроискатель 1 (2, 3) содержит три ножки 12, корпус 13, в котором в соответствующих радиальных отверстиях жестко закреплены направляющие 14 ножек 12. В корпусе 13 размещен соосно в подшипниках 15 цилиндр 16. Направляющие 14 расположены в плоскости, перпендикулярной оси цилиндра 16, причем нижняя направляющая 14 расположена вертикально, а две боковые - под углом к горизонту 2 - 3o. Ножки 12 надеты на направляющие 14 с возможностью осевого перемещения и соединены с цилиндром 16 посредством плоских тяг 17, для которых в корпусе 13 выполнены соответствующие отверстия. Тяги 17 одним концом присоединены к цилиндру 16 посредством сферических подшипников 18, установленных посредством винтов 19 радиально на одной и той же окружности сечения цилиндра 16. Вторые концы тяг 17 жестко соединены с соответствующей ножкой 12 центроискателя 1 (2, 3) и выполнены с возможностью поперечного изгиба. Для удобства работы на концы ножек центроискателя накручены наконечники 20. В примере выполнения наконечники выполнены из ферромагнитного материала - из стали, а центроискатель - из легкого сплава.
Механизм 10 наведения содержит полый корпус 21, якорь 22 из ферромагнитного материала, размещенный в корпусе соосно с возможностью осевого перемещения и взаимодействия рабочим концом с деталью (наконечник 20 ножки 12); рукоятку 23 грубой наводки, взаимодействующую с расположенным в корпусе винтом 24, который взаимодействует одним концом с якорем 22 и расположен с ним соосно; резьбу 25 для точной наводки, которая выполнена на взаимодействующем с якорем 22 конце винта 24, на другом конце которого жестко закреплена рукоятка 26 точной наводки. Шаг резьбы рукоятки 23 больше шага резьбы 25. В якоре 22 выполнена глухая резьбовая проточка. Рукоятка 23 грубой наводки размещена на корпусе 21 с возможностью вращения вокруг своей оси, а второй конец якоря 22, размещенный в корпусе 21, подпружинен. Кроме того, корпус 21 со стороны второго конца якоря 22 жестко соединен с упором 27, выполненным из ферромагнитного материала, в верхней части которого выполнено отверстие для якоря 22 и установлен ограничитель 28 его радиального перемещения. В нижней части упора 27 размещен магнит 29 таким образом, что один из его полюсов совпадает с плоскостью прижима 30 упора. Магнит 29 размещен в прокладке 31 из немагнитного материала.
Устройство работает следующим образом.
Перед выполнением замеров устанавливают базовую ось. Для этого закрепляют в контролируемом узле в контрольной расточке 8 магнитными прихватками 11 центроискатель 2 с контрольным приемником 5. В противоположной контрольной расточке 7 контролируемого узла посредством механизмов наведения закрепляют центроискатель 1 с лазерным излучателем 4. Включают лазерный излучатель 4. За контрольным приемником 5 устанавливают матовый экран. Вращением рукояток грубой 23 и точной 26 наводок механизмов 10 наведения смещают ножки центроискателя 1 в ту или иную сторону по горизонтали и добиваются появления на матовом экране четкого изображения концентрических окружностей, являющихся изображением кольцевой структуры луча. Базовую ось считают установленной.
Для проведения замеров для контроля соосности деталей центроискатель 3 с рабочим приемником 6 излучения устанавливают в расточку 9 контролируемой детали узла. Центроискатель 3 неподвижно закрепляют в расточке магнитными прихватками 11. За рабочим приемником 6 устанавливают матовый экран. Изменяя пространственное положение рабочего приемника 6 в центроискателе 3, например, механизмом двухкоординатного перемещения, добиваются появления на матовом экране четкого изображения концентрических окружностей, образованных кольцевой структурой луча лазерного излучателя. Отсчет отклонения лазерного луча производят по шкалам механизма двухкоординатного перемещения. По полученным результатам измерений судят о соосности деталей в узле.
Механизм 10 наведения в устройстве контроля соосности деталей работает следующим образом. Плоскостью прижима упора 27, в которой размещен магнит 29, прикрепляют механизм наведения к торцу расточки 7. Затем устанавливают в расточку 7 центроискатель 1 с лазерным излучателем 4 таким образом, чтобы базовые ножки 12 центроискателя 1 располагались в расточке симметрично, а оси якорей 22 механизмов 10 располагались перпендикулярно осям ножек 12. При выполнении этого условия ножки механизмов притягиваются к якорям 22 и к расточке 7 с усилием до 2-х кГ, что обеспечивает надежное закрепление излучателя в расточке. Наведение луча на контрольный приемник 5 осуществляют перемещением якорей 22 механизмов 10 наведения рукоятками грубой 23 и точной 26 наводки. При осевом перемещении якорей 22 концы ножек 12 центроискателя 1 скользят по поверхности расточки 7, оставаясь притянутыми к якорям 22, так как сила трения концов ножек 12 о поверхность расточки 7 не превышает 0,2 силы притяжения ножек 12 к якорям 22, поскольку коэффициент трения стали по стали составляет 0,15 - 0,2. При этом при повороте рукоятки 23 грубой наводки якорь 22 перемещается в осевом направлении на расстояние, соответствующее шагу резьбы рукоятки 23 грубой наводки. При повороте рукоятки 26 точной наводки якорь 22 перемещается в осевом направлении на расстояние, равное разности шагов резьбы рукоятки 23 грубой наводки и резьбы 25, выполненной на взаимодействующем с якорем 22 конце винта 24. Центроискатель 1 изменяет пространственное положение корпуса 13.
Источники информации, принятые во внимание при экспертизе:
1. Карасев В.И., Монэс Д.С. Монтаж паровых турбин с помощью оптических приборов. -М.: Энергия, 1976, с. 15, рис. 2, с. 95, рис. 27.
2. Авторское свидетельство СССР N 1439400, кл. G 01 B 21/00, 1988 - прототип.
3. Авторское свидетельство СССР N 578555, кл. G 01 B 5/25, 1977.
4. Карасев В.И., Монэс Д.С. Монтаж паровых турбин с помощью оптических приборов. -М.: Энергия, 1976, с. 54 - 61 - прототип.
5. Авторское свидетельство СССР N 252949, кл. B 25 B 11/02, 1969.
6. Авторское свидетельство СССР N 956266, кл. B 25 B 11/02, 1982.
| название | год | авторы | номер документа |
|---|---|---|---|
| Лазерно-телевизионный способ контроля несоосности деталей | 1987 |
|
SU1439400A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ СООСНОСТИ ДЕТАЛЕЙ, СТЫКУЕМЫХ ПО ВЕРТИКАЛИ | 2023 |
|
RU2805190C1 |
| СПОСОБ ЦЕНТРОВКИ ВАЛОЛИНИИ ТУРБОАГРЕГАТА | 1994 |
|
RU2082075C1 |
| БЕСКОНТАКТНОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ РАССТОЯНИЯ ДО РАЗЛИЧНЫХ ТОЧЕК ПОВЕРХНОСТИ ОБЪЕКТА | 2008 |
|
RU2383858C2 |
| КОНТРОЛЬНО-ТРЕНИРОВОЧНЫЙ ПРИБОР | 1997 |
|
RU2120598C1 |
| УЧЕБНО-ТРЕНИРОВОЧНОЕ СРЕДСТВО | 1998 |
|
RU2126127C1 |
| Устройство для автоматизированного контроля соосности и центровки механических конструкций | 2016 |
|
RU2639993C1 |
| Способ лазерной связи в открытом пространстве и комплекс для его реализации | 2023 |
|
RU2831323C1 |
| Способ измерения формы деталей, изогнутых из листового металлопроката, и устройство для его осуществления | 2018 |
|
RU2685793C1 |
| ЛАЗЕРНЫЙ ЦЕЛЕУКАЗАТЕЛЬ-ДАЛЬНОМЕР | 2012 |
|
RU2522784C1 |
Изобретение используется в контрольно-измерительной технике. Устройство содержит лазерный излучатель 4, контрольный 5 и рабочий 6 приемники излучения. Излучатель 4 и приемник 5 неподвижно размещены в центроискателях 1 и 2 в контролируемом узле. Приемник 6 размещен в центроискателе 3 подвижно в контролируемой детали узла. Ножки 12 центроискателей 2 и 3 закреплены в контролируемом узле неподвижно магнитными прихватками 11, а ножки 12 центроискателя 1 закреплены подвижно посредством механизмов 10 наведения. Плоскость прижима упора механизма 10 наведения совпадает с полюсом магнита. Магнитное поле замыкается через один полюс магнита, упор, якорь, ножку 12, контролируемый узел и второй полюс магнита, плотно прижимая ножку 12 к якорю и узлу. Перемещая якорь, смещают ножки 12. Центроискатель 1 изменяет пространственное положение корпуса. Луч попадает в приемник 5 без изменения положения излучателя 4 в центроискателе 1. Подвижное закрепление приемника 6 обеспечивает попадание луча в приемник 6. Луч имеет кольцевую структуру. О соосности судят по величине отклонения пространственного положения луча в приемнике 6 от базовой оси. Центроискатель 1 (2,3) содержит корпус, в котором в подшипниках размещен цилиндр. В радиальных отверстиях в цилиндре жестко закреплены направляющие, на которые надеты ножки 12. Ножки 12 соединены посредством плоских тяг с цилиндром. Перемещение хотя бы одной из ножек 12 вызывает аналогичное перемещение двух оставшихся. Достигаемый технический результат: повышение точности, достоверности контроля, упрощение конструкции. 3 с. и 1 з.п. ф-лы, 4 ил.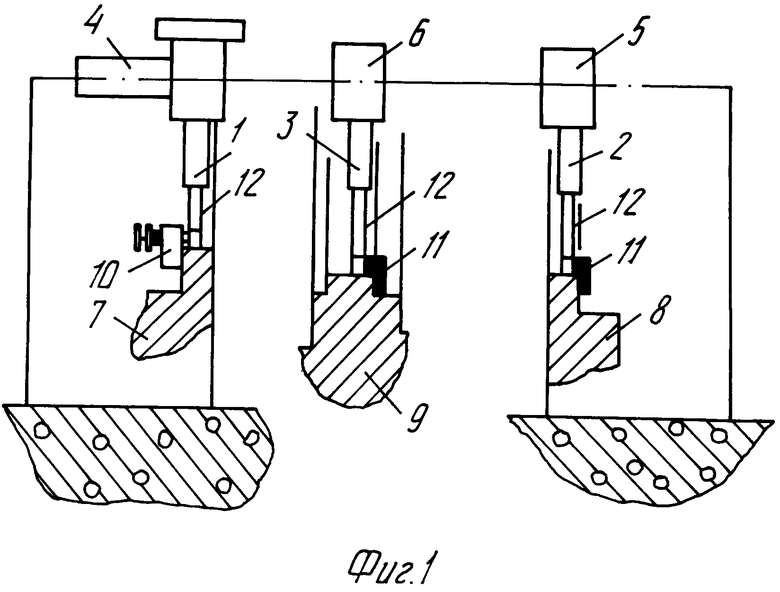
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| SU, авторское свидетельство, 1439400, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Карасев В.И., Монэс Д.С | |||
| Монтаж паровых турбин с помощью оптических приборов | |||
| - М.: Энергия, 1976, с | |||
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| SU, авторское свидетельство, 956266, кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |

