Изобретение относится к военной технике, а именно к аппаратуре лазерного целеуказания и дальнометрии.
Известны лазерные целеуказатели-дальномеры (далее - ЛЦД), предназначенные для визуальной разведки целей на местности, измерения дальности и угловых координат целей и лазерного целеуказания [1].
Недостатком известного ЛЦД является невозможность ориентирования на местности без использования заранее привязанных ориентиров и специального оборудования, а также отсутствие возможности взаимодействия с бортом летательного аппарата для наведения его на цель и точного ее поражения авиационными средствами.
Наиболее близким по технической сущности к предлагаемому устройству является лазерный целеуказатель-дальномер, описанный в [2].
Указанный ЛЦД содержит приемопередатчик, в корпусе которого расположены блок цифровой обработки с цифроиндикатором для визуализации в окуляре измеренной дальности до цели и ее угловых координат, датчик стартового сигнала и блок оптический, включающий установленные на блоке охлаждения лазерный излучатель, несущий элемент, на котором смонтированы система телескопическая, оптически сопряженная с лазерным излучателем, и приемно-визирный канал, выполненный в виде оптически сопряженных объектива, светоделительного кубика с визирной сеткой и устройства фотоприемного с механизмом защиты чувствительного элемента, систему наведения с приводами поворота платформы вокруг вертикальной и горизонтальной осей и измерителями горизонтального угла и угла места, которые связаны с последней и включают датчик приращения соответствующего угла и цифровой реверсивный счетчик углов, выходные сигналы которого предназначены для преобразования в блоке цифровой обработки величин углов в код управления цифроиндикатором, треногу с устройством горизонтирования, источник питания для подключения к приемопередатчику, устройство ориентирования на местности и блок синхронизации в виде микро-ЭВМ с встроенной спутниковой навигационной системой для определения прямоугольных и геодезических координат точки стояния лазерного целеуказателя-дальномера и выполненный с возможностью информационного обмена с приемопередатчиком и взаимодействия со средствами связи для передачи координат точки стояния лазерного целеуказателя-дальномера с геодезическими и прямоугольными координатами цели внешнему абоненту, а также приема от последнего команды, обеспечивающей запуск приемопередатчика через блок синхронизации в режиме подсвета, при этом приемопередатчик, тренога и система наведения выполнены с возможностью фиксации относительно друг друга посредством опорных элементов и зажимных механизмов, система наведения и приемопередатчик выполнены с возможностью взаимного информационного обмена, цифровой реверсивный счетчик горизонтального угла выполнен с возможностью блокировки счета, блок цифровой обработки приемопередатчика содержит измеритель временных интервалов, вход которого подключен к выходу устройства фотоприемного, а лазерный излучатель включает осветитель с активным элементом и лампой накачки и резонатор, в корпусе которого расположено зеркало с высоким коэффициентом отражения.
В известном ЛЦД ориентирование на местности, т.е. определение дирекционного угла на выбранный ориентир, производится по магнитному азимуту с помощью штатного устройства ориентирования, которое содержит магнитную стрелку и устанавливается непосредственно на корпус приемопередатчика. Однако предельная погрешность такого ориентирования достаточно велика и составляет 0-12 д.у. (д.у. - деление угломера, 0-01 д.у.=3,6', 60-00 д.у.=360°), при выполнении ориентирования необходимо учитывать влияние различных металлических предметов и объектов, находящихся в зоне расположения ЛЦД, а в местах с магнитной аномалией ориентирование с использованием магнитной стрелки вообще невозможно, при этом требуется определение поправки, учитывающей разницу между направлением на север вертикали координатной сетки карты и магнитным меридианом, а также собственную погрешность устройства ориентирования. Величина поправки фиксируется записью в формуляре ЛЦД и учитывается при очередном ориентировании. Определение поправки должно производиться с определенного места (пункта выверки), с которого хорошо видны две-три ориентирные точки, а дирекционные углы направлений на выбранные точки должны быть известны. Действие найденной поправки ограничено расстоянием от пункта выверки.
Кроме того, в известном ЛЦД отсутствует возможность измерения величины барометрического давления в месте расположения ЛЦД и, соответственно, определения давления в месте расположения цели, что не позволяет передавать информацию о давлении (дополнительно к информации о широте и долготе расположения цели) на борт летательного аппарата с целью вычисления высоты цели по методике стандартной атмосферы с использованием зависимости барометрического давления от высоты по данным ГОСТ 4401-81 [3], принятой в авиации для обеспечения точного выведения борта летательного аппарата в район цели и эффективного использования авиационных средств поражения.
Таким образом, автономность применения известного ЛЦД ограничена из-за отсутствия возможности ориентирования на местности, где нет ориентиров с заранее известными дирекционными углами, имеются ограничения по использованию устройства ориентирования по магнитному азимуту, предельная погрешность ориентирования по магнитному азимуту (0-12 д.у.) существенно (по крайней мере, в три раза) превышает предельную погрешность углоизмерительных датчиков системы наведения (0-04 д.у.), требуется предварительное определение поправки устройства ориентирования, при этом функциональные возможности ЛЦД ограничены использованием наземных средств поражения.
Задачей настоящего изобретения является расширение функциональных возможностей наземного лазерного целеуказателя-дальномера в части автономного и более точного обеспечения наведения обычных и управляемых артиллерийских и авиационных средств поражения.
Указанная задача решается за счет того, что известный лазерный целеуказатель-дальномер, содержащий приемопередатчик, в корпусе которого расположены блок цифровой обработки с цифроиндикатором для визуализации в окуляре измеренной дальности до цели и ее угловых координат, датчик стартового сигнала и блок оптический, включающий установленные на блоке охлаждения лазерный излучатель, несущий элемент, на котором смонтированы система телескопическая, оптически сопряженная с лазерным излучателем, и приемно-визирный канал, выполненный в виде оптически сопряженных объектива, светоделительного кубика с визирной сеткой и устройства фотоприемного с механизмом защиты чувствительного элемента, систему наведения с приводами поворота платформы вокруг вертикальной и горизонтальной осей и измерителями горизонтального угла и угла места, которые связаны с последней и включают датчик приращения соответствующего угла и цифровой реверсивный счетчик углов, выходные сигналы которого предназначены для преобразования в блоке цифровой обработки величин углов в код управления цифроиндикатором, треногу с устройством горизонтирования, источник питания для подключения к приемопередатчику, устройство ориентирования на местности и блок синхронизации в виде микро-ЭВМ с встроенной спутниковой навигационной системой для определения прямоугольных и геодезических координат точки стояния лазерного целеуказателя-дальномера и выполненный с возможностью информационного обмена с приемопередатчиком и взаимодействия со средствами связи для передачи координат точки стояния лазерного целеуказателя-дальномера с геодезическими и прямоугольными координатами цели внешнему абоненту, а также приема от последнего команды, обеспечивающей запуск приемопередатчика через блок синхронизации в режиме подсвета, при этом приемопередатчик, тренога и система наведения выполнены с возможностью фиксации относительно друг друга посредством опорных элементов и зажимных механизмов, система наведения и приемопередатчик выполнены с возможностью взаимного информационного обмена, цифровой реверсивный счетчик горизонтального угла выполнен с возможностью блокировки счета, блок цифровой обработки приемопередатчика содержит измеритель временных интервалов, вход которого подключен к выходу устройства фотоприемного, а лазерный излучатель включает осветитель с активным элементом и лампой накачки и резонатор, в корпусе которого расположено зеркало с высоким коэффициентом отражения, дополнительно снабжен электронным измерителем барометрического давления, устройство ориентирования на местности выполнено в виде лазерного гирокомпаса с опорным элементом для установки и фиксации на поворотной платформе системы наведения и оптическим визиром, ось которого совмещена с измерительной осью лазерного гирокомпаса, а цифровые реверсивные счетчики углов размещены в системе наведения и выполнены с энергонезависимой памятью, при этом электронный измеритель барометрического давления введен в состав блока синхронизации, который дополнительно выполнен с возможностью информационного обмена с лазерным гирокомпасом и системой наведения для определения дирекционного угла по измеренному лазерным гирокомпасом истинному азимуту выбранного направления с учетом поправки на сближение истинного меридиана данной точки с осевым меридианом географической зоны расположения лазерного целеуказателя-дальномера и записи его величины в энергонезависимую память цифрового реверсивного счетчика горизонтальных углов системы наведения, а также вычисления давления в месте расположения цели по измеренному давлению в месте развертывания лазерного целеуказателя-дальномера электронным измерителем барометрического давления и вычисленному приращению давления по разнице в высоте расположения цели и лазерного целеуказателя-дальномера, определяемой по измеренным приемопередатчиком и системой наведения дальности и углу места, и передачи через средство связи внешнему абоненту дополнительно величины давления в месте расположения цели, при этом система наведения выполнена с возможностью подключения к источнику питания, а блок цифровой обработки приемопередатчика выполнен с возможностью отображения на цифроиндикаторе после включения питания значения дирекционного угла и угла места.
Снабжение лазерного целеуказателя-дальномера электронным измерителем барометрического давления и выполнение устройства ориентирования на местности в виде лазерного гирокомпаса с опорным элементом для установки и фиксации на поворотной платформе системы наведения и оптическим визиром, ось которого совмещена с измерительной осью лазерного гирокомпаса, при размещении цифровых реверсивных счетчиков углов в системе наведения и выполнении их с энергонезависимой памятью, с введением электронного измерителя барометрического давления в состав блока синхронизации, который дополнительно выполнен с возможностью информационного обмена с лазерным гирокомпасом и системой наведения, позволило обеспечить автономное ориентирование ЛЦД в выбранной точке стояния на местности, относительно которой нет заранее известных дирекционных углов направлений на ориентиры. Для выполнения указанного автономного ориентирования лазерный гирокомпас устанавливают на системе наведения и по его оптическому визиру наводят на выбранный ориентир. Обнуляют показания датчика горизонтальных углов системы наведения, включают лазерный гирокомпас и по определенному алгоритму проводят измерения, осуществляя развороты лазерного гирокомпаса на системе наведения на определенные углы с дискретностью отсчета 0-01 д.у. За счет информационной связи лазерного гирокомпаса и системы наведения с блоком синхронизации (микро-ЭВМ) на дисплее последнего отображается требуемое и текущее значение угла поворота. Измерения, произведенные лазерным гирокомпасом, преобразуются в значение истинного (астрономического) азимута [4] выбранного ориентирного направления (горизонтальное проложение выбранного направления на ориентир относительно направления на север), величина которого благодаря информационной связи лазерного гирокомпаса и блока синхронизации передается в последний. С учетом наличия координат (широта, долгота) места расположения ЛЦД, измеренных с помощью спутниковой навигационной системы (далее - СНС) блока синхронизации, последний автоматически преобразует величину истинного азимута в дирекционный угол, вводя поправку на сближение осевого и местного меридиана точки измерения, и сохраняет в своей памяти. После ориентирования лазерного гирокомпаса на системе наведения на произвольно выбранный ориентир и определения на него дирекционного угла последний записывается в энергонезависимую память цифровых реверсивных счетчиков, введенных в систему наведения. Для выполнения указанных операций система наведения выполнена с возможностью подключения к источнику питания. При снятии лазерного гирокомпаса с системы наведения и установке затем на последней приемопередатчика питание временно отключается от системы наведения. В этот момент информация о дирекционном угле сохраняется в энергонезависимой памяти цифровых реверсивных счетчиков. После подключения питания к приемопередатчику и, соответственно, к системе наведения информация о дирекционном угле и угле места автоматически из энергонезависимой памяти цифровых реверсивных счетчиков системы наведения поступает в блок цифровой обработки приемопередатчика и отображается на цифроиндикаторе. Если при этом приемопередатчик наведен визирной сеткой на изначально выбранный ориентир, для которого определен дирекционный угол, то ЛЦД становится готов к разведке целей от привязанного направления на ориентир с определенным значением дирекционного угла, предельная погрешность определения которого с использованием лазерного гирокомпаса соизмерима (или меньше) с погрешностью измерения углов системы наведения (0-02…0-04 д.у.). Таким образом, данный ЛЦД обеспечивает в автономных условиях более высокую точность ориентирования на местности по дирекционному углу и, следовательно, более высокую точность определения координат целей.
С учетом информационного взаимодействия с внешними абонентами (огневая артиллерийская позиция или борт летательного аппарата) данный ЛЦД обеспечивает выдачу более точного целеуказания (т.е. более точных данных о координатах цели), что повышает вероятность поражения цели за счет более точного наведения артиллерийских и авиационных средств поражения. Особенно это важно при применении неуправляемых (обычных) средств поражения или средств, оснащенных инерциально-спутниковой системой наведения, когда результат применения впрямую зависит от точности выдачи координат цели. При этом следует отметить, что использование для выдачи целеуказания топографических карт дает в зависимости от масштаба карты (1:25000; 1:50000:1:100000; 1:200000) средние квадратические ошибки в определении расстояний на местности 12-25, 25-50, 50-100, 100-200 м и ошибки определения геодезических координат 1, 1-2, 2-4, 4-7 угл.с, что существенно превышает погрешности данного ЛЦД как средства инструментальной разведки и целеуказания.
При измерении координат точки стояния ЛЦД с помощью CMC одновременно измеряется барометрическое давление в месте расположения ЛЦД электронным измерителем барометрического давления, который введен в блок синхронизации. Для получения давления в месте расположения цели с помощью ЛЦД определяют расстояние до цели и угол места цели, которые по информационной связи от приемопередатчика поступают в блок синхронизации, где вычисляется высота цели. Используя зависимость барометрического давления от высоты для стандартной атмосферы согласно [3], заложенную в память блока синхронизации, и величину давления в точке стояния ЛЦД, определяют величину давления в месте расположения цели. Последнее принципиально важно при взаимодействии данного ЛЦД с бортом летательного аппарата, для которого давление на высоте цели играет роль третьей координаты в дополнении к широте и долготе.
Таким образом, совокупность отличительных признаков позволила решить поставленную задачу - расширить функциональные возможности наземного малогабаритного лазерного целеуказателя-дальномера в части автономного и более точного обеспечения наведения обычных и управляемых артиллерийских и авиационных средств поражения.
В измерителе горизонтального угла цифровой реверсивный счетчик горизонтальных углов может быть выполнен с двумя входными каналами, сумматором и делителем на два, датчик приращения горизонтального угла может включать в свой состав двухканальный квадратурный энкодер и два подключенных к нему квадратурных цифровых декодера, выходы которых подключены к входным каналам цифрового реверсивного счетчика горизонтальных углов, двухканальный квадратурный энкодер может быть выполнен на основе жестко связанного с вертикальной осью поворота платформы системы наведения оптического лимба с равномерно расположенными относительно оси поворота штриховыми растрами и маски, размещенных в зазорах двух диаметрально расположенных относительно вертикальной оси поворота оптоэлектронных пар, каждая из которых содержит четырехквадрантный фотодиод, оптически сопряженный с нанесенными на маске четырьмя группами штриховых растров с пространственными фазами 0°, 90°, 180°, 270° и пространственными периодами, равными пространственному периоду штриховых растров оптического лимба.
Такое выполнение измерителя горизонтального угла позволило уменьшить в два раза (до 0-02 д.у.) предельную погрешность измерения горизонтальных углов, что особенно важно в процессе выполнения процедуры измерения истинного азимута лазерным гирокомпасом, установленным на системе наведения, поскольку погрешность измерения угла поворота прямым образом входит в погрешность определения истинного азимута. Из-за возможного эксцентриситета расположения оптического лимба с равномерно расположенными штриховыми растрами относительно оси вращения в датчике приращения с диаметрально противоположными оптоэлектронными парами на выходах двух квадратурных цифровых декодеров при повороте формируется разное количество счетных импульсов: если в одном декодере количество импульсов Nи=N0+Δ (N0 - номинальное количество), то в другом, связанном с диаметрально противоположной оптоэлектронной парой, Nи=N0-Δ. Поскольку каждый счетный импульс представляет собой один дискрет отсчета угла, во входных каналах цифрового реверсивного счетчика при повороте возникают отсчеты горизонтального угла, измененные на N0+Δ и N0-Δ дискретов, а после сложения указанных отсчетов в сумматоре и деления на два в делителе на два достигается результат изменения отсчета угла, равный N0, т.е. эксцентриситет расположения оптического лимба не оказывает влияния на точность измерения горизонтальных углов, что снижает общую погрешность их измерения.
Блок охлаждения может быть выполнен в виде бака с двумя жестко связанными и сообщающимися полостями Т-образной формы, одна из которых предназначена для крепления посредством промежуточной стенки к корпусу приемопередатчика, а другая предназначена для крепления с одной ее стороны лазерного излучателя, а с другой стороны - несущего элемента блока оптического, и компенсатора избыточного давления. Выполнение блока охлаждения в виде бака с двумя жестко связанными и сообщающимися полостями Т-образной формы позволило значительно уменьшить влияние внешних механико-климатических воздействий на союстировку излучающего и визирного каналов приемопередатчика (требуемое значение не более 20"). Возможная деформация полости бака, которая связана с корпусом приемопередатчика, не передается полости бака, на которой размещены ответственные за союстировку элементы излучающего и приемно-визирного каналов, так как она не связана с элементами корпуса и может лишь вызвать совместный «поворот» обоих каналов. Постоянное давление внутри бака при изменении температуры окружающей среды и хладагента поддерживается компенсатором избыточного давления, что также снижает возможность разъюстировки каналов.
Механизм защиты чувствительного элемента устройства фотоприемного может быть выполнен в виде оптического фильтра, размещенного на якоре электромагнита между светоделительным кубиком приемно-визирного канала приемопередатчика и входной апертурой устройства фотоприемного, и устройства управления электромагнитом, задающего пусковой ток, ток удержания якоря электромагнита и ток размагничивания в момент отключения. Такое выполнение механизма защиты чувствительного элемента обеспечило работу электромагнита в разных режимах с минимальным энергопотреблением.
Корпус приемопередатчика может быть выполнен в виде рамной конструкции, одна из сторон которой предназначена для размещения узла с двумя защитными стеклами, оптически сопряженными с оптическими осями соответственно системы телескопической и приемно-визирного канала, противоположная сторона предназначена для размещения визирного окуляра, оптически сопряженного с приемно-визирным каналом, нижняя сторона предназначена для размещения опорного элемента для стыковки с системой наведения, а верхняя сторона предназначена для размещения крышки с ручкой для переноски, причем одна из боковых сторон предназначена для крепления блока оптического посредством промежуточной стенки, а другая боковая сторона для крепления блока цифровой обработки. Такое выполнение корпуса приемопередатчика обеспечило доступность всех блоков при ремонте ЛЦД и их взаимозаменяемость.
Датчик стартового сигнала может быть выполнен в виде фотодиода, предназначенного для формирования электрического импульса по каждому импульсу лазерного излучения, при этом фотодиод расположен на внешней стороне корпуса резонатора лазерного излучателя напротив зеркала с высоким коэффициентом отражения, а формируемые им электрические импульсы предназначены для заведения в измеритель временных интервалов в блоке цифровой обработки приемопередатчика. Такое выполнение датчика стартового сигнала позволило повысить надежность данного ЛЦД при измерении дальности до целей по сравнению с известным ЛЦД [2], где датчик стартового сигнала выполнен в виде стекловолоконного световода, ответвляющего часть энергии лазерного излучения из внутренней полости системы телескопической на входную апертуру устройства фотоприемного, и связан с конструктивными и технологическими трудностями по начальной установке световода с целью обеспечения нормируемого уровня стартового светового сигнала, определяемого динамическим диапазоном входных сигналов устройства фотоприемного.
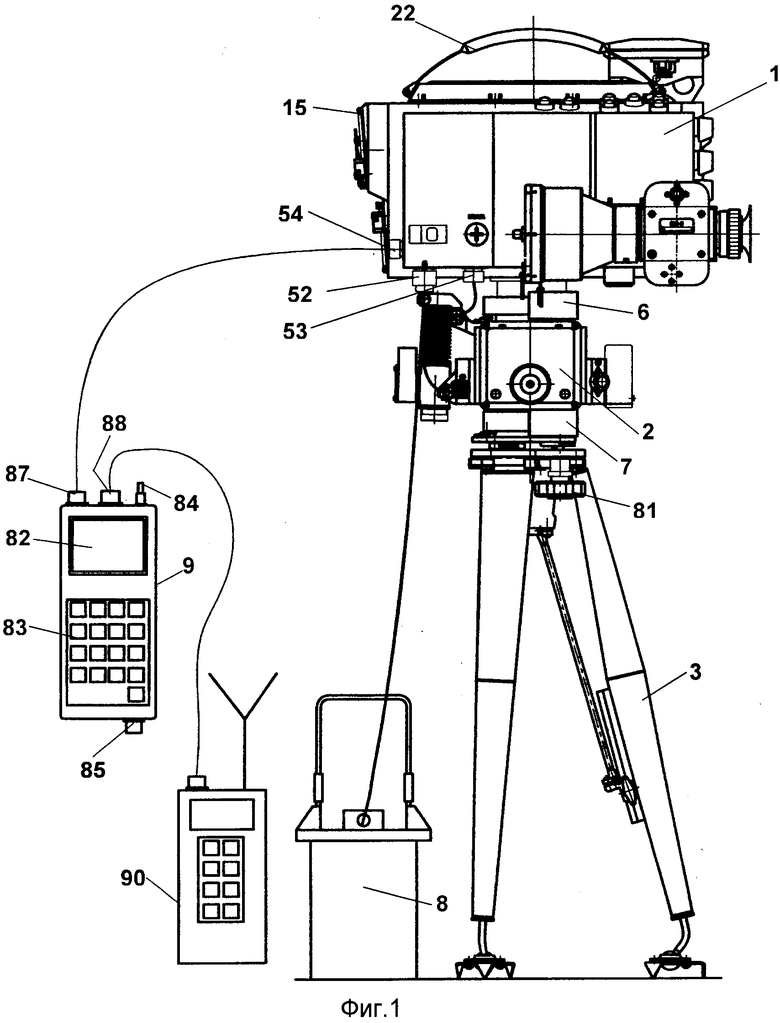
На фиг.1 показан общий вид ЛЦД.
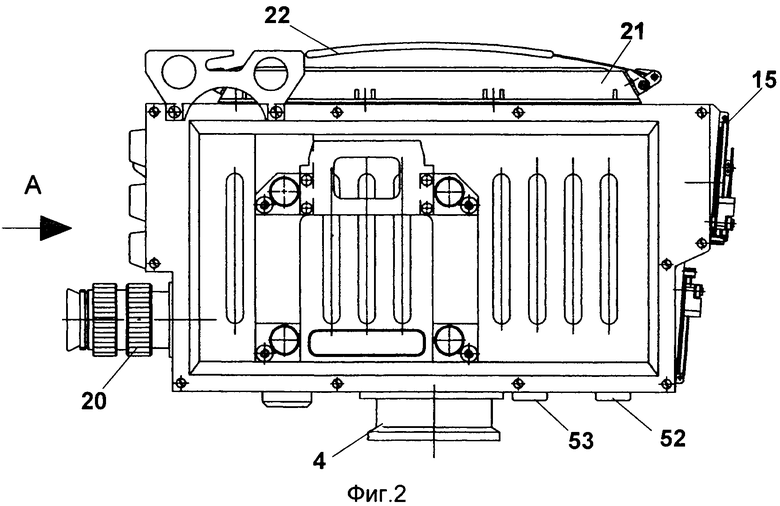
На фиг.2 показан общий вид приемопередатчика.
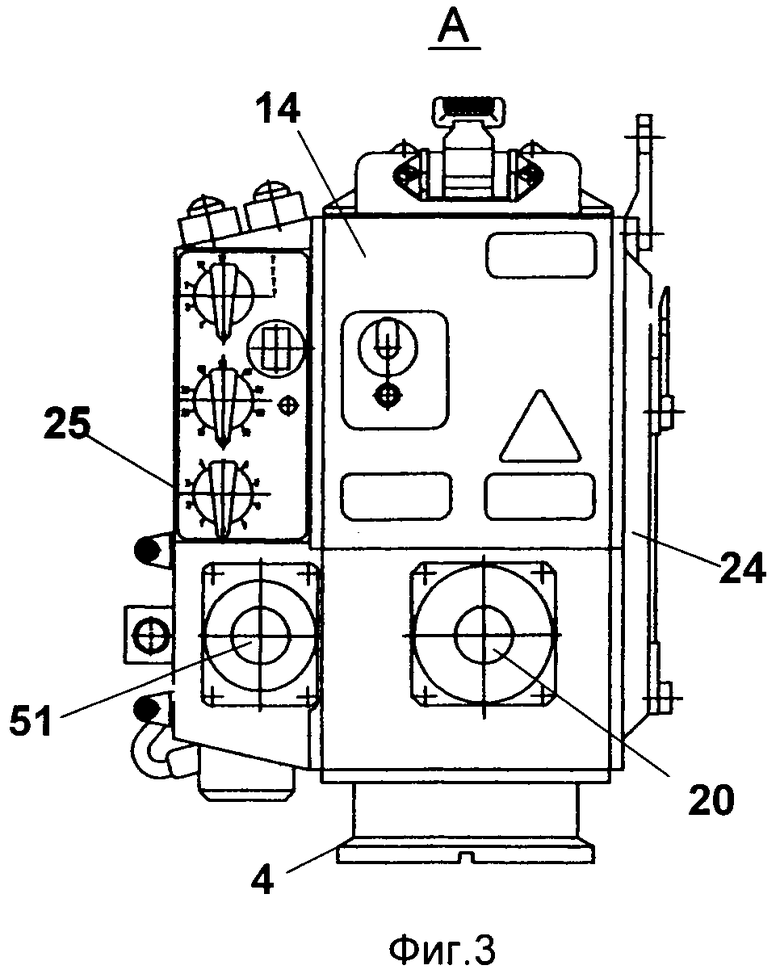
На фиг.3 показан общий вид приемопередатчика по стрелке А на фиг.2.
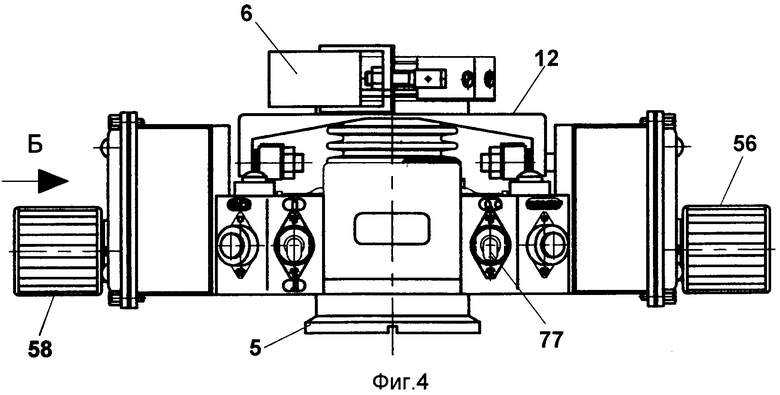
На фиг.4 показан общий вид системы наведения.
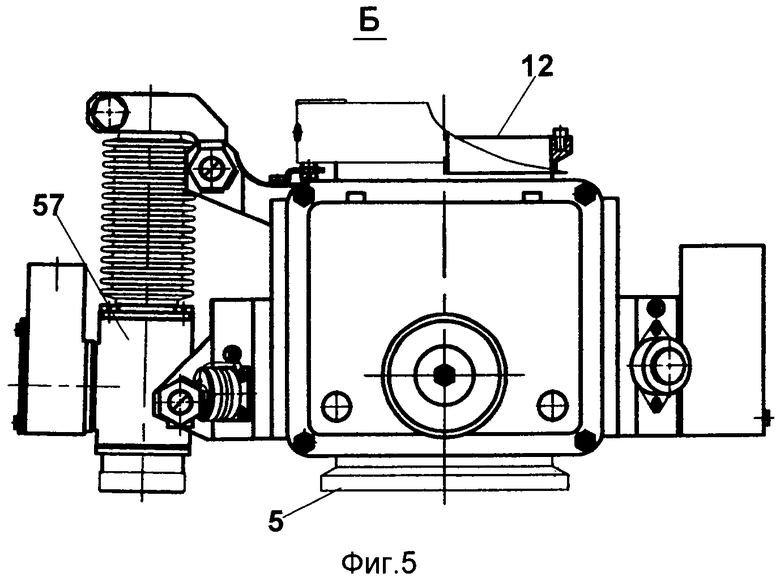
На фиг.5 показан общий вид системы наведения по стрелке Б на фиг.4.
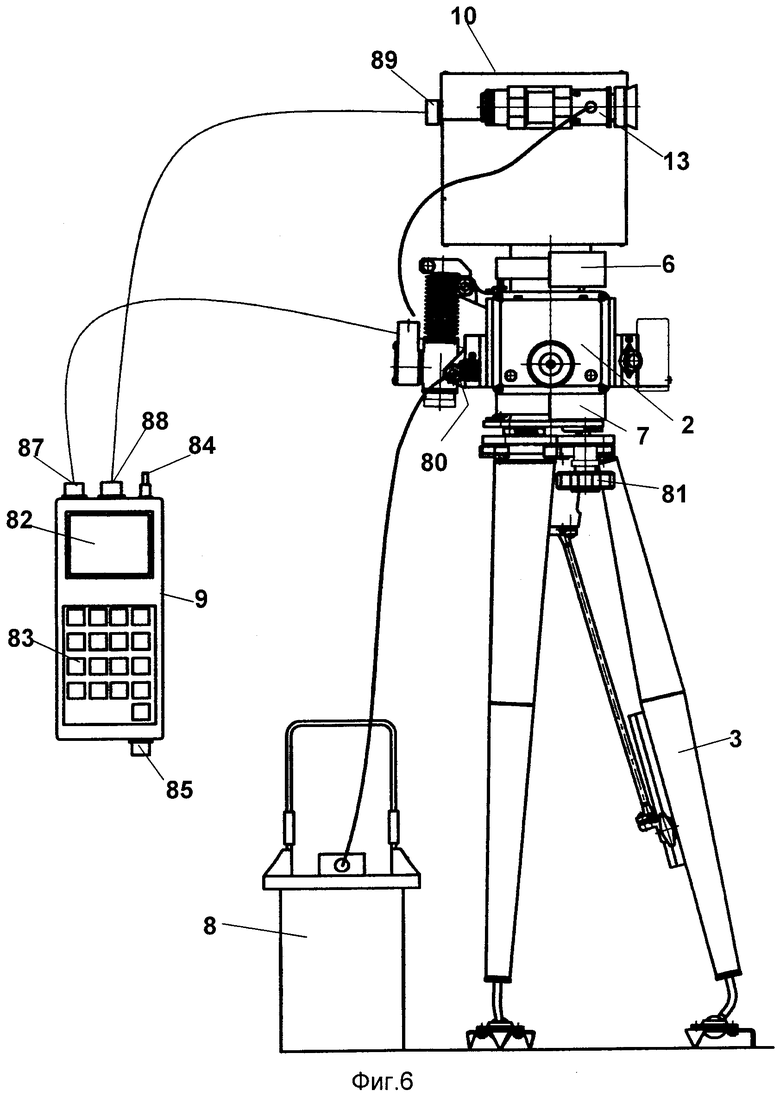
На фиг.6 показан вариант развертывания ЛЦД с лазерным гирокомпасом.
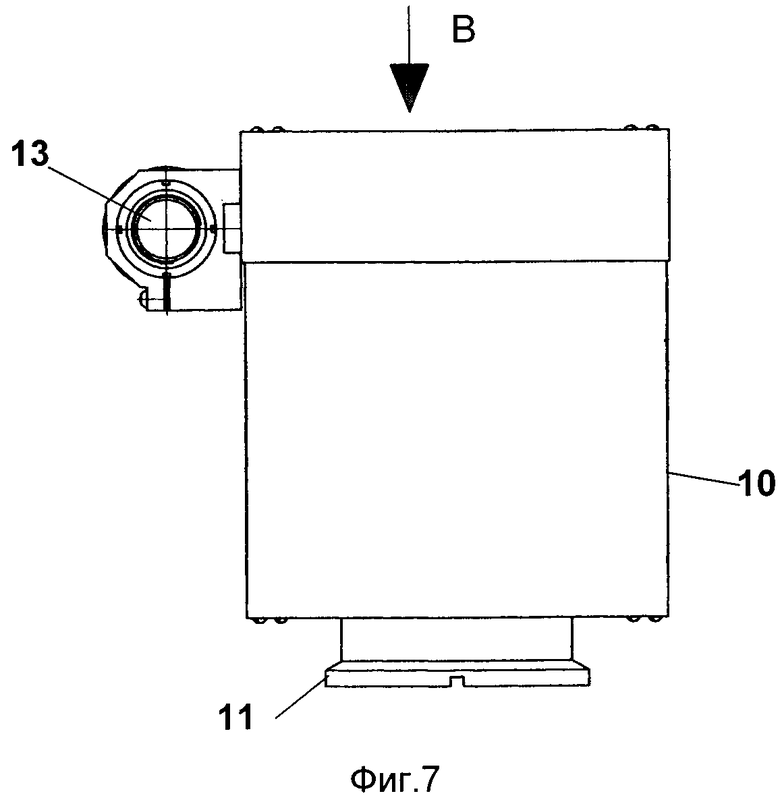
На фиг.7 показан общий вид лазерного гирокомпаса.
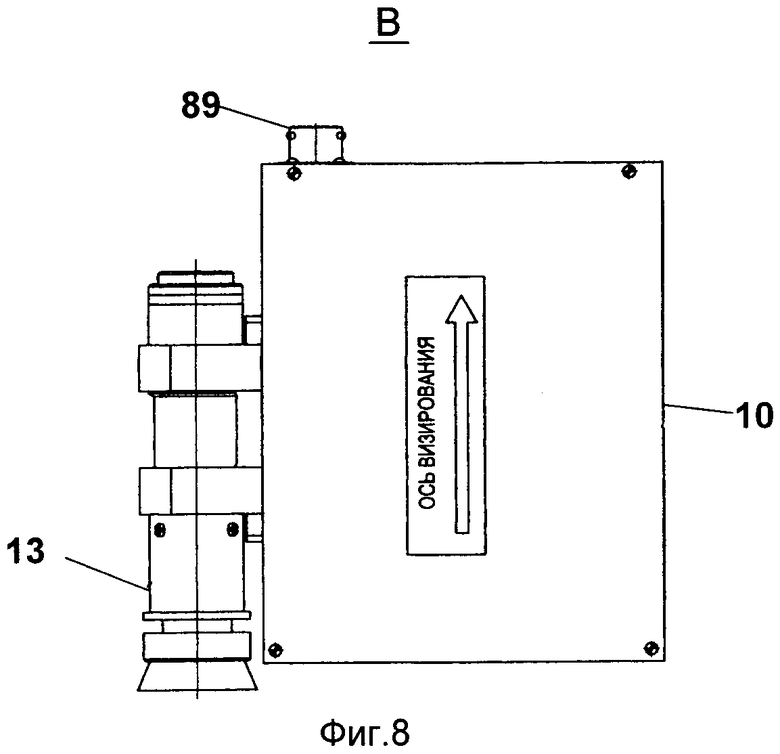
На фиг.8 показан общий вид лазерного гирокомпаса по стрелке В на фиг.7.
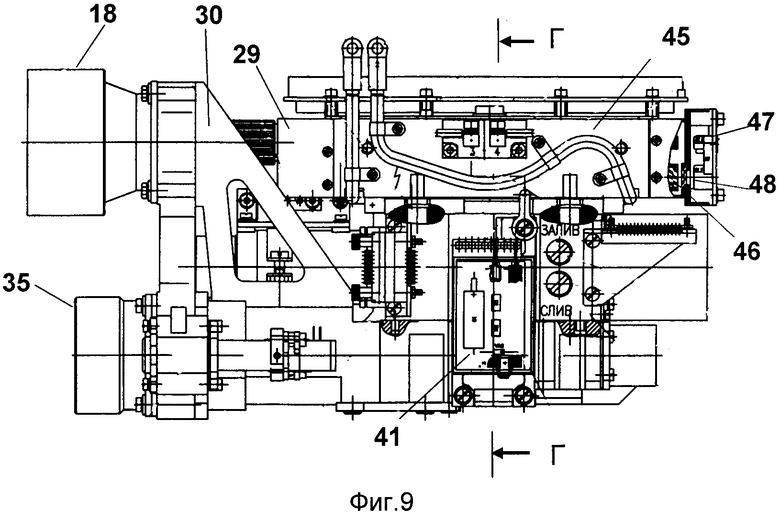
На фиг.9 показан общий вид блока оптического.
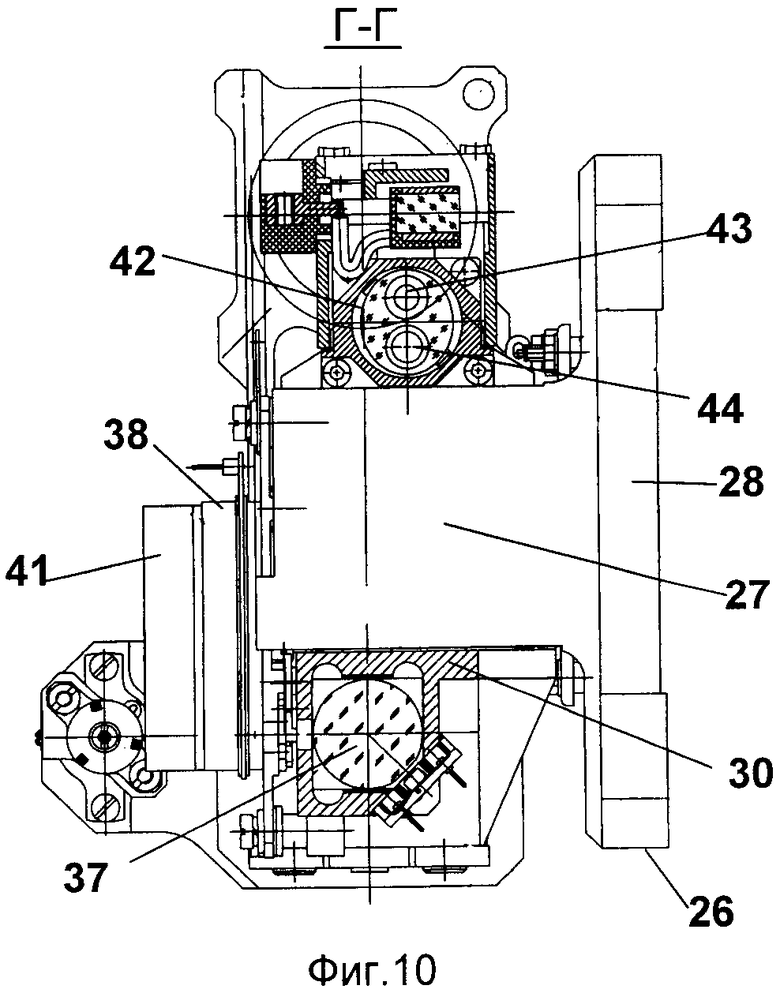
На фиг.10 показан разрез Г-Г блока оптического на фиг.9.
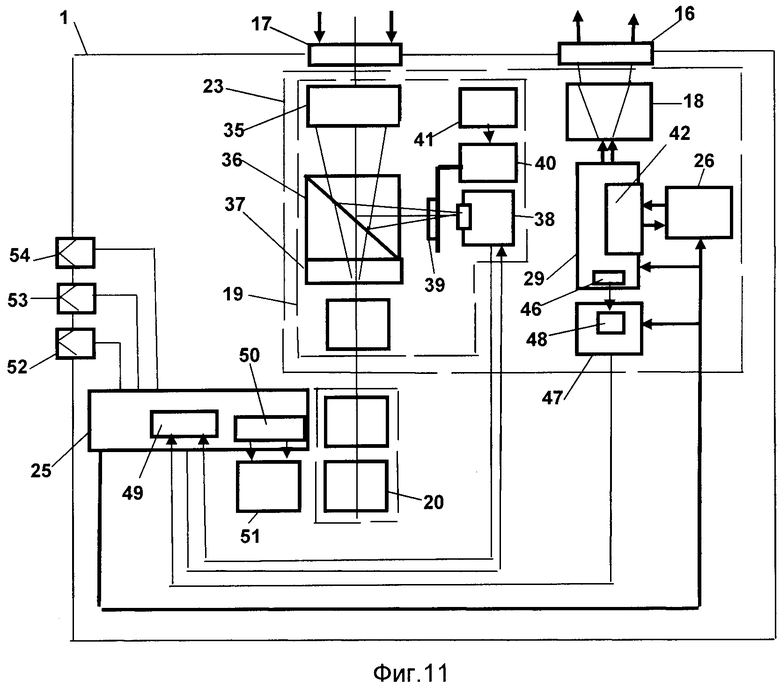
На фиг.11 показана структурная схема приемопередатчика.
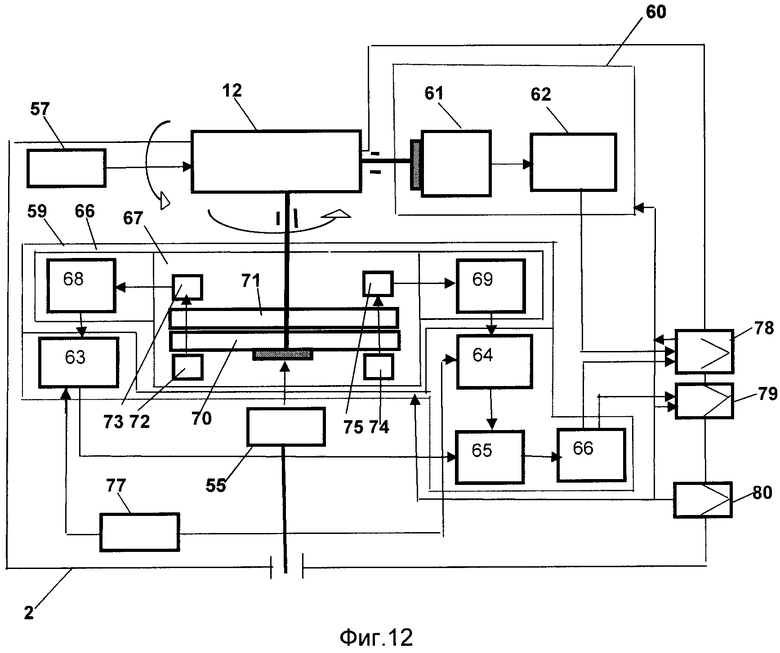
На фиг.12 показана структурная схема системы наведения.
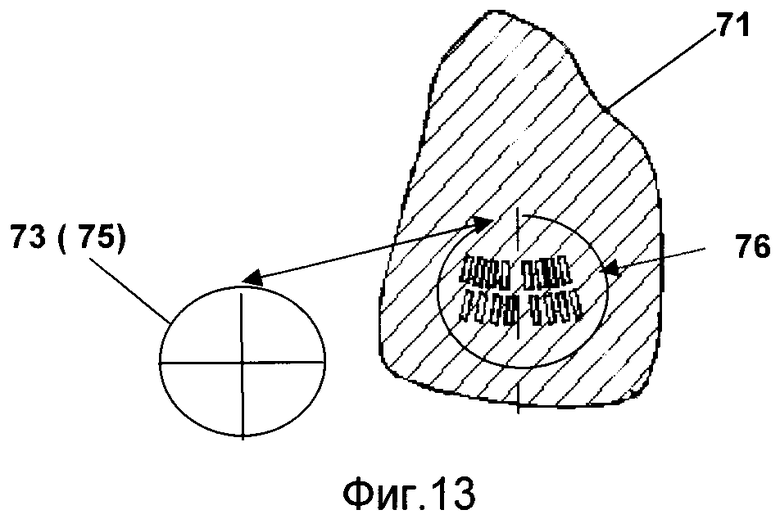
На фиг.13 показано место маски с четырьмя группами штриховых растров.
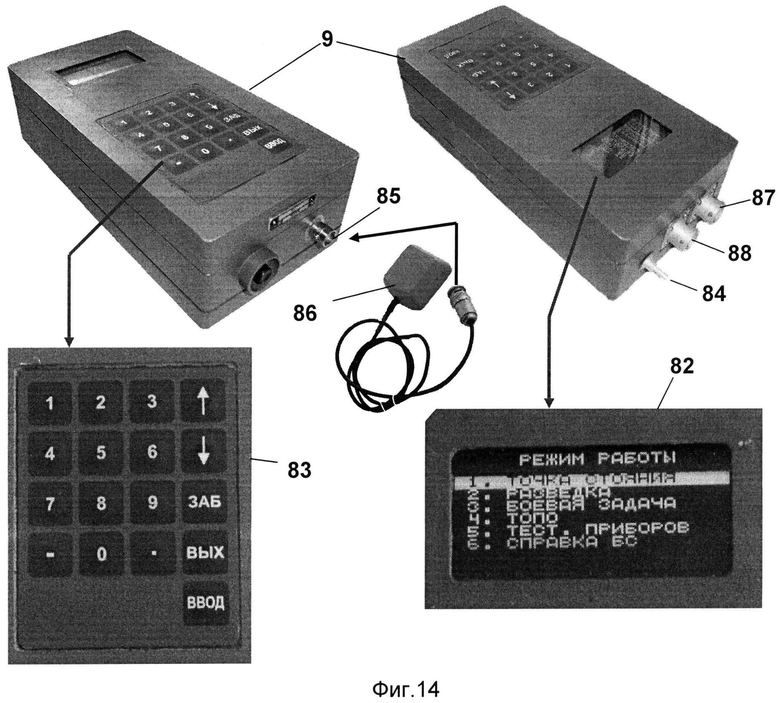
На фиг.14 показана фотография блока синхронизации.
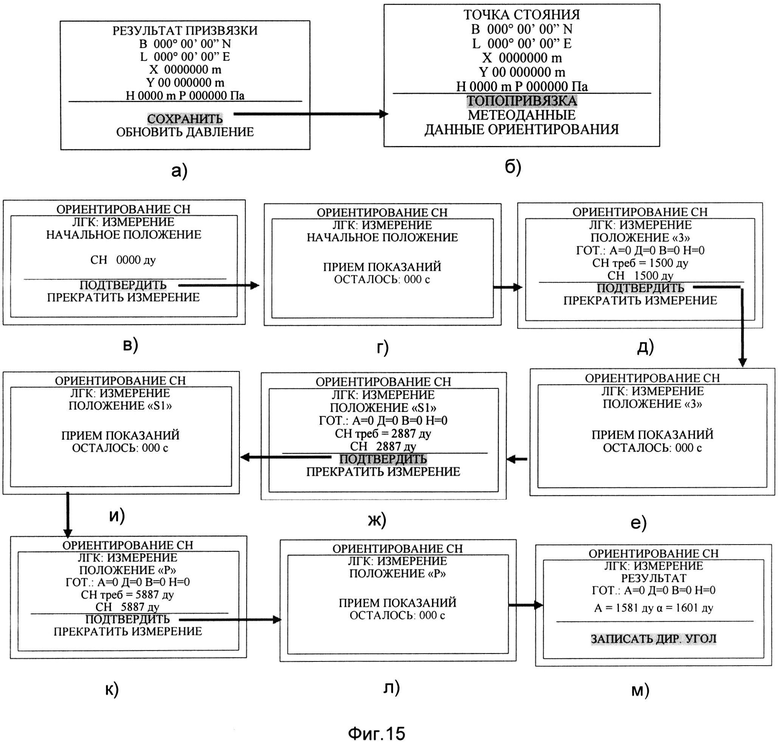
На фиг.15 показано представление информации на дисплее блока синхронизации при определении координат точки стояния и при определении дирекционного угла ориентира с помощью лазерного гирокомпаса.
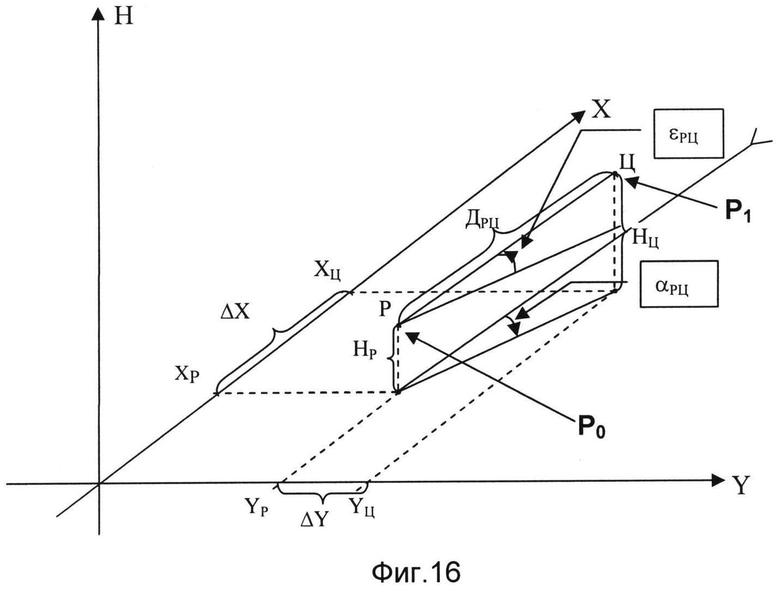
На фиг.16 показано взаимное положение точки Р стояния ЛЦД и точки Ц расположения цели в координатах X, Y, H.
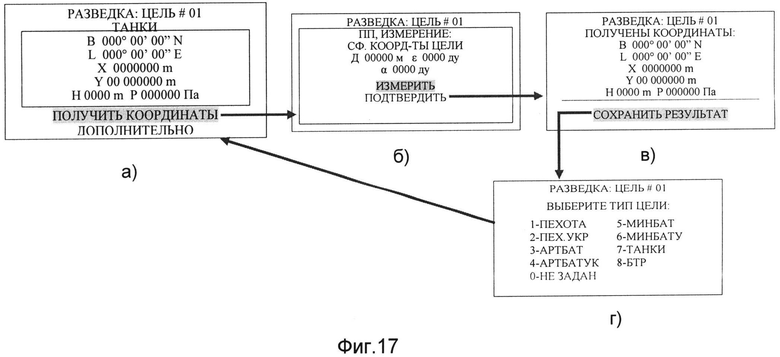
На фиг.17 показано представление информации на дисплее блока синхронизации при определении координат целей (режим разведки).
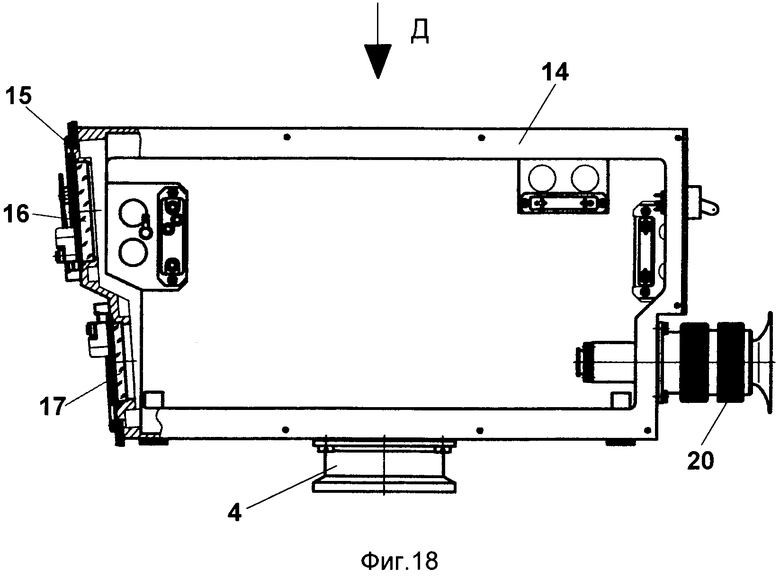
На фиг.18 показан общий вид корпуса приемопередатчика.
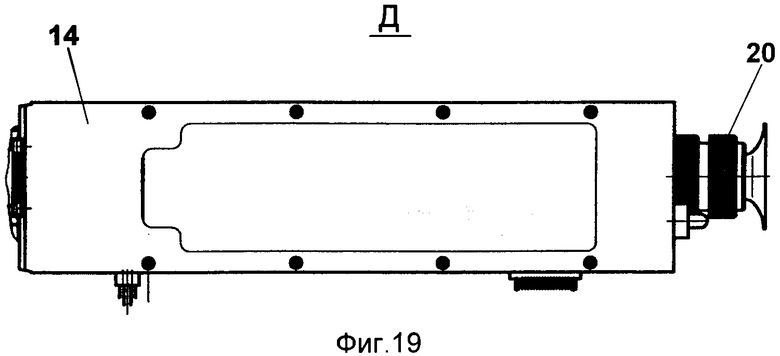
На фиг.19 показан общий вид корпуса приемопередатчика по стрелке Д.
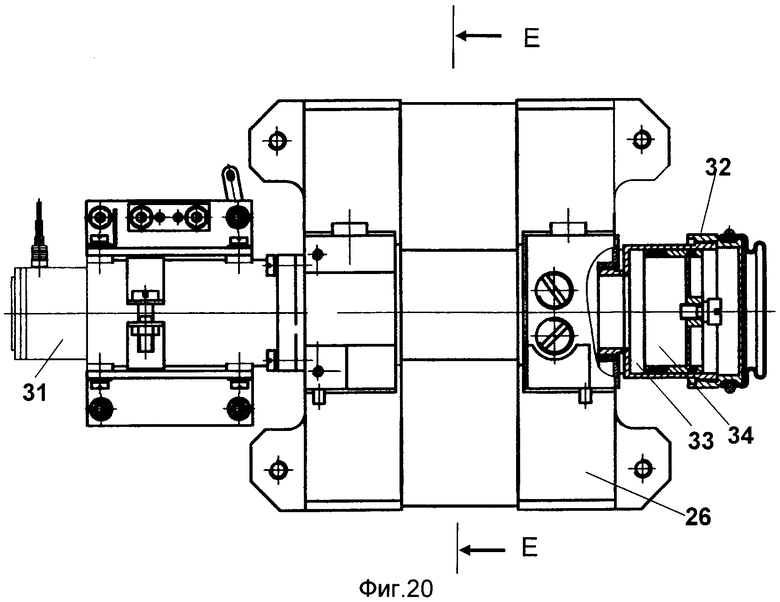
На фиг.20 показан общий вид блока охлаждения.
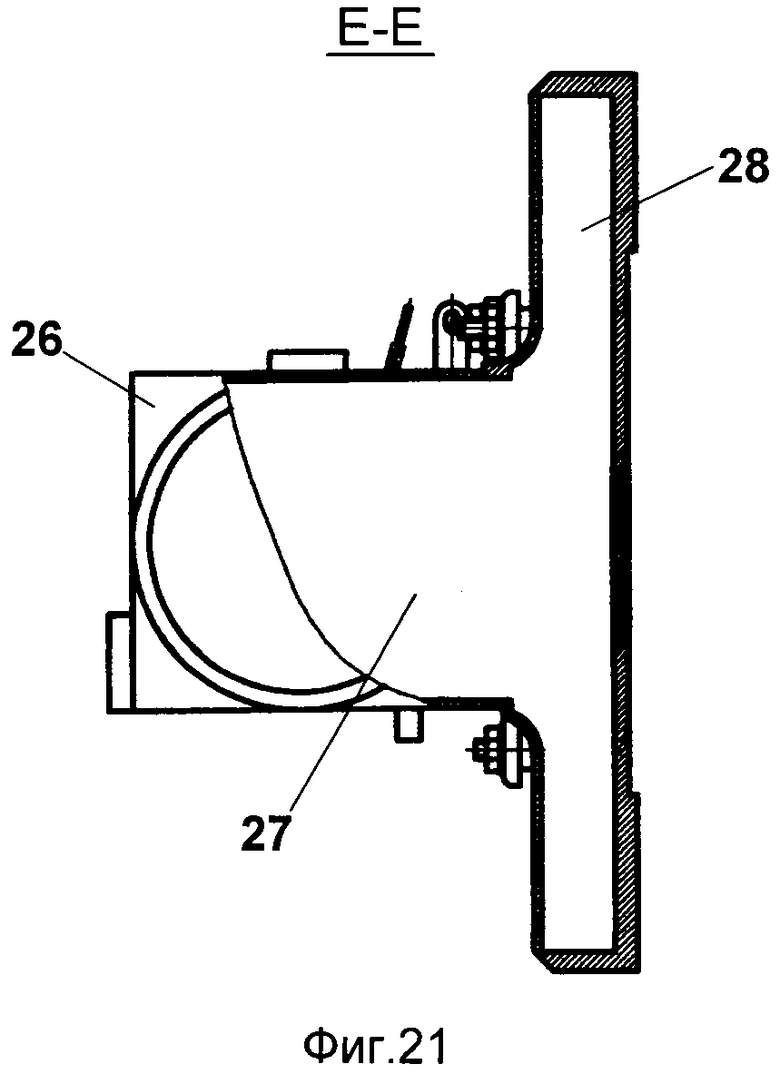
На фиг.21 показан разрез Е-Е на фиг.20.
На фиг.22 представлена фотография ЛЦД в развернутом положении.
Лазерный целеуказатель-дальномер содержит приемопередатчик 1, систему наведения 2, треногу 3, сопряженные между собой посредством двух опорных элементов 4, 5 и двух зажимных элементов 6, 7, источник питания 8, блок синхронизации 9 в виде микро-ЭВМ и лазерный гирокомпас 10 с опорным элементом 11 для установки и фиксации на поворотной платформе 12 системы наведения 2 и оптическим визиром 13. Приемопередатчик 1 включает корпус 14, выполненный в виде рамной конструкции, на одной из сторон которой размещен узел 15 с защитными стеклами 16, 17, оптически сопряженными с оптическими осями соответственно системы телескопической 18 и приемно-визирного канала 19, на противоположной стороне размещен визирный окуляр 20, оптически сопряженный с приемно-визирным каналом 19, на нижней стороне размещен опорный элемент 4 для стыковки с платформой 12 системы наведения 2, на верхней стороне размещена крышка 21 с ручкой 22 для переноски, на одной боковой стороне закреплен блок оптический 23 посредством промежуточной стенки 24, на другой боковой стороне установлен блок цифровой обработки 25. Блок оптический 23 содержит блок охлаждения 26, который выполнен в виде бака Т-образной формы с двумя жестко связанными и сообщающимися полостями 27, 28, заполненными хладагентом, при этом последняя предназначена для крепления блока оптического 23 посредством промежуточной стенки 24 к одной из боковых сторон корпуса 14 приемопередатчика 1, а другая 27 - для установки лазерного излучателя 29 и несущего элемента 30 блока оптического 23. Блок охлаждения также включает насосную группу 31 и компенсатор избыточного давления 32, выполненный в виде цилиндра 33 и поршня 34, который сообщается с внутренним объемом бака. На несущем элементе 30, который выполнен Г-образной формы, смонтированы система телескопическая 18, оптически сопряженная с лазерным излучателем 29, и приемно-визирный канал 19, выполненный в виде оптически сопряженных объектива 35, светоделительного кубика 36 с визирной сеткой 37 и устройства фотоприемного 38 с механизмом защиты его чувствительного элемента. Механизм защиты выполнен в виде оптического фильтра 39, размещенного на якоре электромагнита 40 между светоделительным кубиком 36 и входной апертурой устройства фотоприемного 38, и устройства управления электромагнитом 41, которое задает пусковой ток, ток удержания якоря электромагнита и ток размагничивания в момент отключения.
Лазерный излучатель 29 включает осветитель 42 с активным элементом 43 и лампой накачки 44 и резонатор, в корпусе 45 которого расположено зеркало 46 с высоким коэффициентом отражения ("глухое" зеркало с коэффициентом отражения около 100%). Датчик стартового сигнала 47 выполнен на основе фотодиода 48, расположенного на внешней стороне корпуса 45 резонатора лазерного излучателя 29 напротив зеркала 46 и связан с измерителем временных интервалов 49 в блоке цифровой обработки 25. Блок цифровой обработки 25 включает в свой состав цифроиндикатор 50, расположенный в поле зрения окуляра 51.
Приемопередатчик снабжен узлом связи 52 с источником питания 8, узлом связи 53 с системой наведения 2 и узлом связи 54 с блоком синхронизации 9.
Система наведения 2 оснащена приводом 55, управляемым рукояткой 56, для поворота платформы 12 вокруг вертикальной оси, т.е. в горизонтальной плоскости, и приводом 57, управляемым рукояткой 58, для поворота платформы 12 вокруг горизонтальной оси, т.е. в вертикальной плоскости. Система наведения 2 содержит измеритель горизонтального угла 59 и измеритель угла места 60, которые связаны с платформой 12. Измеритель угла места 60 включает датчик приращения угла места 61 и цифровой реверсивный счетчик углов с энергонезависимой памятью 62. Измеритель горизонтального угла 59 включает цифровой реверсивный счетчик горизонтальных углов с двумя входными каналами 63 и 64, сумматором 65 и делителем на два 66, датчик приращения горизонтального угла включает в свой состав двухканальный квадратурный энкодер 67 и два подключенных к нему квадратурных цифровых декодера 68, 69, выходы которых подключены к входным каналам 63 и 64 цифрового реверсивного счетчика горизонтальных углов. Двухканальный квадратурный энкодер 67 выполнен на основе жестко связанного с вертикальной осью поворота платформы 12 оптического лимба 70 и маски 71, расположенных в зазорах двух диаметрально расположенных относительно вертикальной оси поворота оптоэлектронных пар с источниками излучения 72, 74 и четырехквадрантными фотодиодами 73, 75. Оптический лимб 70 выполнен с равномерно расположенными относительно оси поворота штриховыми растрами, каждый четырехквадрантный фотодиод 73, 75 оптически сопряжен с нанесенными на маске четырьмя группами штриховых растров 76 с пространственными фазами 0°, 90°, 180°, 270° и пространственными периодами, равными пространственному периоду штриховых растров оптического лимба 70.
Входные каналы 63 и 64 цифрового реверсивного счетчика горизонтальных углов подключены к устройству блокировки счета горизонтального угла 77. Система наведения снабжена узлом связи 78 с приемопередатчиком 1, узлом связи 79 с блоком синхронизации 9 и узлом связи 80 с источником питания 8.
Тренога 3 снабжена устройством горизонтирования, выполненным на основе двух горизонтирующих винтов 81 и шарового шарнира, образующих вершины прямоугольного равнобедренного треугольника.
Блок синхронизации 9 снабжен дисплеем 82 для отображения информации и клавиатурой 83 для выбора режимов работы. Внутри корпуса блока синхронизации размещен модуль электронного измерителя барометрического давления, выведенный наружу штуцер 84 которого обеспечивает связь с атмосферой. Узел связи 85 предназначен для подключения антенны 86 к расположенному внутри корпуса модулю спутниковой навигационной системы. Узел связи 87 предназначен для информационного обмена с приемопередатчиком 1 или системой наведения 2, узел связи 88 предназначен для информационного обмена с узлом связи 89 лазерного гирокомпаса 10 или с радиостанцией 90 или внешней ЭВМ при взаимодействии с внешними абонентами.
Лазерный целеуказатель-дальномер работает следующим образом.
1. Определение координат точки стояния с помощью СНС. В выбранной точке стояния подключают к узлу связи 85 блока синхронизации 9 антенну 86 модуля СНС, включают блок синхронизации, устанавливают режим определения собственных координат и определяют посредством спутниковой навигации прямоугольные (X,Y) и геодезические (В-широта, L-долгота, Н -высота) координаты точки стояния, которые отображаются на дисплее 82 (фиг.15,а). Одновременно фиксируется и атмосферное давление (Р), измеренное модулем электронного измерителя барометрического давления. Полученные данные сохраняются в памяти блока синхронизации (фиг.15,б).
2. Развертывание в варианте лазерного гирокомпаса и определение дирекционного угла на выбранный ориентир. Производят развертывание ЛЦД в варианте лазерного гирокомпаса согласно фиг.6. При этом устанавливают в выбранной точке стояния с определенными координатами треногу 3, устанавливают на треногу систему наведения 2 опорой 5 и фиксируют зажимным механизмом 7 треноги. Производят горизонтирование системы наведения (с контролем по ее пузырьковому уровню), используя горизонтирующие винты треноги 81. Устанавливают на систему наведения лазерный гирокомпас 10 опорой 11 и фиксируют зажимным механизмом 6 платформы 12 системы наведения. Подключают узел связи 89 лазерного гирокомпаса 10 к узлу связи 88 блока синхронизации 9, подключают узел связи 79 системы наведения 2 к узлу связи 87 блока синхронизации 9. Подключают узел связи 80 системы наведения 2 к источнику питания 8. Наводят вертикальную линию сетки оптического визира 13 лазерного гирокомпаса 10 на выбранный в поле зрения ориентир, обнуляют (для удобства) отсчет горизонтального угла. Устанавливают в меню блока синхронизации режим определения дирекционного угла на выбранный ориентир и запускают процедуру определения дирекционного угла, которая показана на фиг.15, в)-м). При этом лазерный гирокомпас 10 производит измерения в начальном положении (горизонтальный угол 0000 д.у.), в положении 1500 д.у., далее находит положение, близкое к направлению "восток-запад" (2887 д.у. на фиг.15,ж) и проводит измерения в указанном положении, далее проводит измерения в положении 5887 д.у., т.е. отличающееся на 3000 д.у. или 180° от предыдущего, и выдает готовый результат: А - измеренное значение истинного азимута, α - значение дирекционного угла, вычисленного блоком синхронизации с использованием соотношений

где γ - поправка на сближение истинного меридиана данной точки с осевым меридианом зоны;



L - долгота осевого меридиана зоны;
n - номер зоны.
Развороты лазерного гирокомпаса на системе наведения производят в соответствии с индикацией на дисплее блока синхронизации, определяемой работой лазерного гирокомпаса: например, индикация СНтреб=1500 д.у. требует разворота системы наведения до достижения отсчета 1500 д.у., при этом текущее значение угла разворота непрерывно отображается на дисплее блока синхронизации. При получении требуемого угла подают команду "ПОДТВЕРДИТЬ". По окончании процедуры измерения наводят вертикальную линию сетки оптического визира 13 лазерного гирокомпаса 10 на выбранный ориентир, подают команду "ЗАПИСАТЬ ДИР.УГОЛ" согласно фиг.15,м), при этом определенный дирекционный угол сохраняется в энергонезависимой памяти двухканального цифрового реверсивного счетчика горизонтального угла. Отключают систему наведения 2 от источника питания 8, отключают систему наведения и лазерный гирокомпас от блока синхронизации, снимают лазерный гирокомпас с системы наведения.
3. Развертывание в варианте ЛЦД и ориентирование ЛЦД на местности по дирекционному углу ориентира. Устанавливают на систему наведения 2 вместо лазерного гирокомпаса приемопередатчик 1 опорой 4 и фиксируют зажимным механизмом 6 поворотной платформы 12 системы наведения. Подключают узел связи 53 приемопередатчика к узлу связи 78 системы наведения. Подключают узел связи 54 приемопередатчика к узлу связи 87 блока синхронизации. Подключают узел связи 52 приемопередатчика к источнику питания 8. Наводят сетку визирного канала приемопередатчика 1 на ориентир, дирекционный угол на который определен с помощью лазерного гирокомпаса, включают питание приемопередатчика (и, соответственно, системы наведения), при этом на цифроиндикаторе 50, наблюдаемом через окуляр 51, отображается значение дирекционного угла на ориентир, сохраненное в энергонезависимой памяти двухканального цифрового реверсивного счетчика горизонтального угла, а также значение угла места, которое предшествовало предыдущему моменту выключения питания. Таким образом, приемопередатчик на системе наведения оказывается ориентированным по дирекционному углу, т.е. при всех дальнейших его разворотах на любой объект (цель) будет показывать дирекционный угол на этот объект (цель).
В случае, если в процессе работы возникли погрешности в ориентировании приемопередатчика с системой наведения (т.е. при наведении на ориентир показания дирекционного угла отличаются от ранее определенного), поворотом системы наведения устанавливают на цифроиндикаторе 50 требуемое значение дирекционного угла, затем включают устройство блокировки счета горизонтального угла 77, наводят приемопередатчик через его визирный канал точно на ориентир и выключают устройство блокировки 77. При этом ориентирование по дирекционному углу восстановлено.
4. Работа в режиме измерения координат целей. Приемопередатчик 1 с системой наведения 2 обеспечивают измерения дальности и двух угловых координат (дирекционный угол и угол места) целей.
Измерение угла места обеспечивается тем, что при повороте платформы 12 относительно горизонтальной оси датчик приращения угла места 61 совместно с цифровым реверсивным счетчиком углов места 62 формируют информацию об угле поворота платформы 12 системы наведения в вертикальной плоскости, которая поступает через узел связи 78 в блок цифровой обработки 25 приемопередатчика 1, где преобразуется в код управления цифроиндикатором 50.
При повороте платформы 12 системы наведения 2 относительно вертикальной оси производится поворот связанного с нею оптического лимба 70 относительно маски 71, что вызывает модуляцию излучения источников излучения 72, 74 диаметрально расположенных относительно оси поворота оптоэлектронных пар и формирование модуляционных сигналов на выходах четырехквадрантных фотодиодов 73, 75 указанных оптоэлектронных пар, которые обрабатываются квадратурными цифровыми декодерами 68, 69 и преобразуются в счетные импульсы, поступающие на входные каналы 63 и 64 цифрового реверсивного счетчика горизонтальных углов для формирования отсчетов соответствующих углов поворота. Эти отсчеты складываются в сумматоре 65 и делятся на два в делителе 66, что обеспечивает исключение влияния эксцентриситета оптического лимба на точность измерения горизонтального угла. Информация об угле поворота платформы 12 системы наведения в горизонтальной плоскости с выхода делителя на два через узел связи 78 поступает в блок цифровой обработки 25 приемопередатчика 1, где преобразуется в код управления цифроиндикатором 50. При этом на цифроиндикаторе 50 отображаются и наблюдаются через окуляр 51 текущие значения угла места и горизонтального угла.
Дополнительно информация об угле поворота платформы 12 системы наведения в горизонтальной плоскости выводится через узел связи 79 и поступает на блок синхронизации 9 при развертывании в варианте лазерного гирокомпаса.
В режиме измерения дальности блок цифровой обработки 25 обеспечивает запуск лазерного излучателя 29 и блока его охлаждения 26, который прокачивает охлаждающую жидкость через осветитель 42 с активным элементом 43 и лампой накачки 44, обеспечивая охлаждение последних. При запуске излучателя формируется импульсный разряд в лампе накачки 44, излучение которого вызывает генерацию активным элементом 43 мощного импульса лазерного излучения, который выходит из корпуса резонатора 45, проходит через систему телескопическую 18 с увеличением диаметра пучка и уменьшением его расходимости и через защитное стекло 16 и далее распространяется в атмосфере до попадания на цель. Незначительная часть энергии лазерного излучения попадает через зеркало резонатора с высоким коэффициентом отражения 46 на фотодиод 48 датчика стартового сигнала 47, который формирует стартовый электрический сигнал, поступающий на вход измерителя временных интервалов 49 блока цифровой обработки 25 и запускающий отсчет временного интервала. Блок цифровой обработки 25 обеспечивает также запуск устройства фотоприемного 38, а также временную автоматическую регулировку его усиления. Лазерное излучение, отраженное от цели, принимается приемно-визирным объективом 35, отражается от диагональной плоскости светоделительного кубика 36 и попадает через входную апертуру устройства фотоприемного 38 на его чувствительный элемент. При этом на выходе устройства фотоприемного формируется электрический стоп-сигнал, который поступает на вход измерителя временных интервалов 49 блока цифровой обработки 25 и останавливает отсчет временного интервала. Измеритель временных интервалов 49 преобразует измеренное значение временного интервала t (с) в расстояние L (м) до цели по соотношению
где с - значение скорости света в атмосфере, м/с.
Цифровой код расстояния преобразуется в блоке цифровой обработки 25 в код управления цифроиндикатором 50, при этом на цифроиндикаторе отображается в течение ограниченного времени и наблюдается через окуляр 51 отсчет дальности до цели.
Если цель имеет значительный зеркальный характер отражения (например, оснащена ретрорефлекторами типа уголковых отражателей), отраженный сигнал может вызвать повреждение чувствительного элемента устройства фотоприемного 38. Для защиты устройства фотоприемного (например, в условиях начала работы по неизвестной мишенной обстановке) подают с устройства управления электромагнитом 41 команду на включение электромагнита 40, при этом устройство управления задает необходимый пусковой ток для срабатывания электромагнита 40 и ток удержания электромагнита во включенном состоянии, а закрепленный на его якоре оптический фильтр 39 перекрывает входную апертуру устройства фотоприемного 38, ослабляя входной сигнал, отраженный от цели. Если цель снабжена уголковыми отражателями, при определенном коэффициенте пропускания оптического фильтра будет обеспечиваться измерение дальности до уголкового отражателя и не будет регистрироваться отсчет дальности до диффузно отражающей цели. Такой режим позволяет произвести начальную разведку мишенной обстановки на предмет наличия зеркально отражающих целей, а также производить защиту чувствительного элемента устройства фотоприемного в процессе наладочных и проверочных работ. При выключении электромагнита устройство управления 41 задает ток размагничивания для приведения электромагнита в начальное состояние.
Определение прямоугольных и геодезических координат цели производится с помощью блока синхронизации 9 путем решения прямой геодезической задачи с использованием ранее определенных и зафиксированных координат точки стояния. Пусть прямоугольные координаты и высота точки стояния Р (фиг.16), в которой расположен ЛЦД, есть ХР, YP, HP. Если цель находится в точке Ц и ее сферические координаты, определенные с помощью ЛЦД, есть ДРЦ (наклонная дальность до цели), αРЦ (дирекционный угол направления РЦ) и εРЦ (угол места направления РЦ), то решением прямой геодезической задачи можно вычислить прямоугольные координаты и высоту цели по формулам
При этом, если давление в точке Р, измеренное электронным измерителем барометрического давления блока синхронизации, равно P0, то взяв из таблиц [3] давление РР, соответствующее высоте НР, и давление РЦ, соответствующее высоте НЦ, можно вычислить давление на высоте цели P1 по соотношению

Пример выполнения блоком синхронизации задачи определения координат цели показан на фиг.17. Из исходного меню "РАЗВЕДКА" на фиг.17,а) при подаче команды "ПОЛУЧИТЬ КООРДИНАТЫ" блок синхронизации 9 переходит в кадр ожидания приема от приемопередатчика 1 данных об измеренных сферических координатах цели на фиг.17,б) (Д - дальность, м; α - дирекционный угол, д.у.; ε - угол места, д.у.), которые автоматически передаются из блока цифровой обработки 25 в момент измерения дальности. Далее при подаче команды "ПОДТВЕРДИТЬ" блок синхронизации вычисляет и отображает координаты цели на фиг.17,в), а также давление Р, Па, на высоте Н, м, цели, рассчитанное с использованием зависимости барометрического давления от высоты согласно [3], заложенной в память блока синхронизации, и величины давления в точке стояния ЛЦД. Сохранение результатов определения координат цели в памяти блока синхронизации производится подачей команды "СОХРАНИТЬ РЕЗУЛЬТАТ" на фиг.17,в) и выбором типа цели на фиг.17,г).
5. Взаимодействие с внешними абонентами. Блок синхронизации обеспечивает передачу через узел связи 88 и радиостанцию 90 или через узел связи непосредственно на внешнюю ЭВМ информационного сообщения, содержащего координаты точки стояния ЛЦД, координаты и тип цели, включая давление на высоте цели, а также дополнительную информацию: метеорологическую дальность видимости и нижнюю границу облачности в районе цели. Указанная информация при получении ее артиллерийской огневой позицией или бортом летательного аппарата может быть использована для организации стрельбы или пусков неуправляемых боеприпасов или для подготовки стрельбы (пусков) высокоточных боеприпасов, оснащенных лазерными головками самонаведения.
В последнем случае взаимодействие с артиллерийской огневой позицией или бортом летательного аппарата включает передачу от последних автоматизированной команды на запуск ЛЦД в режиме подсвета, которая принимается блоком синхронизации 9, транслируется в блок цифровой обработки 25 приемопередатчика 1 и вызывает срабатывание лазерного излучателя 29 с блоком охлаждения 26 и устройства фотоприемного 38 аналогично описанному для режима измерения дальности с тем отличием, что лазерный излучатель формирует последовательность лазерных импульсов (цикл подсвета) с определенной частотой повторения и длительностью цикла, определяемыми типом управляемого боеприпаса и задаваемыми переданной автоматизированной командой на запуск ЛЦД, а устройство фотоприемное 38 и измеритель временных интервалов 49 обеспечивают частотное измерение дальности по каждому импульсу лазерного излучения. При этом отраженное от цели излучение принимается лазерной головкой самонаведения управляемого боеприпаса, которая обеспечивает выбор начального промаха боеприпаса и его наведение на цель с высокой вероятностью прямого попадания.
Проведенные испытания при взаимодействии как с наземной артиллерийской позицией, так и с бортом летательного аппарата подтвердили высокую эффективность ЛЦД в обеспечении стрельбы (пусков, сбросов) обычных и управляемых боеприпасов с полуактивным лазерным наведением. Особенно эффективно применение ЛЦД для обеспечения пусков, сбросов обычных боеприпасов с борта летательного аппарата за счет автоматизированной выдачи на борт координат целей с повышенной точностью.
Литература
1. "Лазерный целеуказатель-дальномер". Патент РФ №2269093 от 27.01.2006 г. с приоритетом от 07.07.2004 г.
2. Лазерный целеуказатель-дальномер ЛЦД-ЗМ1. Руководство по эксплуатации, часть 1 ЖГДК.433785.017 РЭ, 2010 г.
3. ГОСТ 4401-81. "Атмосфера стандартная. Параметры".
4. М.А.Гиршберг. "Геодезия". Москва, издательство "Недра", 1967.
5. О.Н.Лысенко. "Программируемые инкрементальные энкодеры серии DFS60". "Автоматизация в промышленности", июнь 2008 г., стр.40-42.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛАЗЕРНЫЙ ЦЕЛЕУКАЗАТЕЛЬ-ДАЛЬНОМЕР | 2013 |
|
RU2535240C1 |
| ЛАЗЕРНЫЙ ЦЕЛЕУКАЗАТЕЛЬ-ДАЛЬНОМЕР | 2017 |
|
RU2665352C1 |
| УЧЕБНЫЙ ДАЛЬНОМЕР | 2006 |
|
RU2338144C2 |
| ЛАЗЕРНЫЙ ЦЕЛЕУКАЗАТЕЛЬ-ДАЛЬНОМЕР | 2004 |
|
RU2269093C1 |
| Лазерный целеуказатель-дальномер | 2022 |
|
RU2791164C1 |
| ЛАЗЕРНЫЙ ЦЕЛЕУКАЗАТЕЛЬ-ДАЛЬНОМЕР | 2013 |
|
RU2539773C1 |
| Учебный дальномер | 2015 |
|
RU2657112C1 |
| СПОСОБ СТРЕЛЬБЫ УПРАВЛЯЕМЫМ СНАРЯДОМ С ЛАЗЕРНОЙ ПОЛУАКТИВНОЙ ГОЛОВКОЙ САМОНАВЕДЕНИЯ | 2003 |
|
RU2247297C1 |
| СПОСОБ СТРЕЛЬБЫ УПРАВЛЯЕМОЙ РАКЕТОЙ | 2013 |
|
RU2529828C1 |
| Комплект носимой аппаратуры топогеодезической привязки и формирования целеуказаний | 2017 |
|
RU2661676C1 |
Изобретение относится к области лазерного целеуказания и дальнометрии и касается лазерного целеуказателя-дальномера. Лазерный целеуказатель-дальномер включает в себя приемопередатчик, систему наведения с измерителями горизонтального угла и угла места, треногу, источник питания, блок синхронизации со встроенной спутниковой навигационной системой и электронным измерителем барометрического давления, устройство для ориентирования на местности в виде лазерного гирокомпаса с опорным элементом для установки и фиксации на поворотной платформе системы наведения, оптический визир, а также радиостанцию для взаимодействия с внешними абонентами. Технический результат заключается в повышении автономности и точности наведения артиллерийских и авиационных средств поражения. 5 з.п. ф-лы, 22 ил.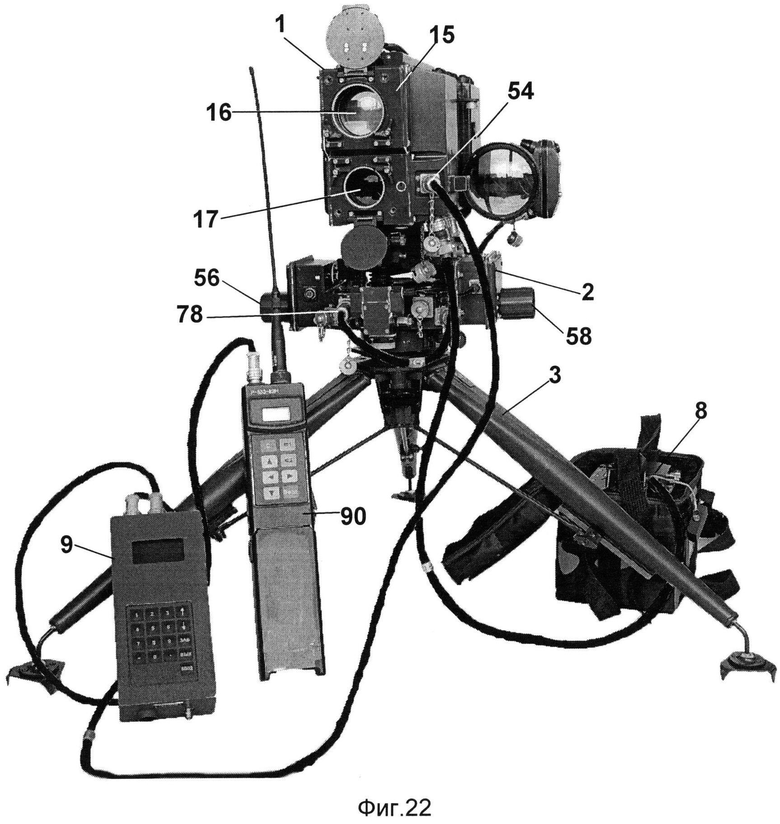
1. Лазерный целеуказатель-дальномер, содержащий приемопередатчик, в корпусе которого расположены блок цифровой обработки с цифроиндикатором для визуализации в окуляре измеренной дальности до цели и ее угловых координат, датчик стартового сигнала и блок оптический, включающий установленные на блоке охлаждения лазерный излучатель, несущий элемент, на котором смонтированы система телескопическая, оптически сопряженная с лазерным излучателем, и приемно-визирный канал, выполненный в виде оптически сопряженных объектива, светоделительного кубика с визирной сеткой и устройства фотоприемного с механизмом защиты чувствительного элемента, систему наведения с приводами поворота платформы вокруг вертикальной и горизонтальной осей и измерителями горизонтального угла и угла места, которые связаны с последней и включают датчик приращения соответствующего угла и цифровой реверсивный счетчик углов, выходные сигналы которого предназначены для преобразования в блоке цифровой обработки величин углов в код управления цифроиндикатором, треногу с устройством горизонтирования, источник питания для подключения к приемопередатчику, устройство ориентирования на местности и блок синхронизации в виде микро-ЭВМ с встроенной спутниковой навигационной системой для определения прямоугольных и геодезических координат точки стояния лазерного целеуказателя-дальномера и выполненный с возможностью информационного обмена с приемопередатчиком и взаимодействия со средствами связи для передачи координат точки стояния лазерного целеуказателя-дальномера с геодезическими и прямоугольными координатами цели внешнему абоненту, а также приема от последнего команды, обеспечивающей запуск приемопередатчика через блок синхронизации в режиме подсвета, при этом приемопередатчик, тренога и система наведения выполнены с возможностью фиксации относительно друг друга посредством опорных элементов и зажимных механизмов, система наведения и приемопередатчик выполнены с возможностью взаимного информационного обмена, цифровой реверсивный счетчик горизонтального угла выполнен с возможностью блокировки счета, блок цифровой обработки приемопередатчика содержит измеритель временных интервалов, вход которого подключен к выходу устройства фотоприемного, а лазерный излучатель включает осветитель с активным элементом и лампой накачки и резонатор, в корпусе которого расположено зеркало с высоким коэффициентом отражения, отличающийся тем, что
лазерный целеуказатель-дальномер снабжен электронным измерителем барометрического давления, устройство ориентирования на местности выполнено в виде лазерного гирокомпаса с опорным элементом для установки и фиксации на поворотной платформе системы наведения и оптическим визиром, ось которого совмещена с измерительной осью лазерного гирокомпаса, а цифровые реверсивные счетчики углов размещены в системе наведения и выполнены с энергонезависимой памятью, при этом электронный измеритель барометрического давления введен в состав блока синхронизации, который дополнительно выполнен с возможностью информационного обмена с лазерным гирокомпасом и системой наведения для определения дирекционного угла по измеренному лазерным гирокомпасом истинному азимуту выбранного направления с учетом поправки на сближение истинного меридиана данной точки с осевым меридианом географической зоны расположения лазерного целеуказателя-дальномера и записи его величины в энергонезависимую память цифрового реверсивного счетчика горизонтальных углов системы наведения, а также вычисления давления в месте расположения цели по измеренному давлению в месте развертывания лазерного целеуказателя-дальномера электронным измерителем барометрического давления и вычисленному приращению давления по разнице в высоте расположения цели и лазерного целеуказателя-дальномера, определяемой по измеренным приемопередатчиком и системой наведения дальности и углу места, и передачи через средство связи внешнему абоненту дополнительно величины давления в месте расположения цели, при этом система наведения выполнена с возможностью подключения к источнику питания, а блок цифровой обработки приемопередатчика выполнен с возможностью отображения на цифроиндикаторе после включения питания значения дирекционного угла и угла места.
2. Лазерный целеуказатель-дальномер по п.1, отличающийся тем, что цифровой реверсивный счетчик горизонтальных углов выполнен с двумя входными каналами, сумматором и делителем на два, датчик приращения горизонтального угла включает в свой состав двухканальный квадратурный энкодер и два подключенных к нему квадратурных цифровых декодера, выходы которых подключены к входным каналам цифрового реверсивного счетчика горизонтальных углов, причем двухканальный квадратурный энкодер выполнен на основе жестко связанного с вертикальной осью поворота платформы системы наведения оптического лимба с равномерно расположенными относительно оси поворота штриховыми растрами и маски, размещенных в зазорах двух диаметрально расположенных относительно вертикальной оси поворота оптоэлектронных пар, каждая из которых содержит четырехквадрантный фотодиод, оптически сопряженный с нанесенными на маске четырьмя группами штриховых растров с пространственными фазами 0°, 90°, 180°, 270° и пространственными периодами, равными пространственному периоду штриховых растров оптического лимба.
3. Лазерный целеуказатель-дальномер по п.1, отличающийся тем, что блок охлаждения выполнен в виде бака с двумя жестко связанными и сообщающимися полостями Т-образной формы, одна из которых предназначена для крепления посредством промежуточной стенки к корпусу приемопередатчика, а другая предназначена для крепления с одной ее стороны лазерного излучателя, а с другой стороны несущего элемента блока оптического, и компенсатора избыточного давления.
4. Лазерный целеуказатель-дальномер по п.1, отличающийся тем, что блок защиты чувствительного элемента устройства фотоприемного выполнен в виде оптического фильтра, размещенного на якоре электромагнита между светоделительным кубиком приемно-визирного канала приемопередатчика и входной апертурой устройства фотоприемного, и устройства управления электромагнитом, задающего пусковой ток, ток удержания якоря электромагнита и ток размагничивания в момент отключения.
5. Лазерный целеуказатель-дальномер по п.1, отличающийся тем, что корпус приемопередатчика выполнен в виде рамной конструкции, одна из сторон которой предназначена для размещения узла с двумя защитными стеклами, оптически сопряженными с оптическими осями соответственно системы телескопической и приемно-визирного канала, противоположная сторона предназначена для размещения визирного окуляра, оптически сопряженного с приемно-визирным каналом, нижняя сторона предназначена для размещения опорного элемента для стыковки с системой наведения, а верхняя сторона предназначена для размещения крышки с ручкой для переноски, причем одна из боковых сторон предназначена для крепления блока оптического посредством промежуточной стенки, а другая боковая сторона для крепления блока цифровой обработки.
6. Лазерный целеуказатель-дальномер по п.1, отличающийся тем, что датчик стартового сигнала выполнен в виде фотодиода, предназначенного для формирования электрического импульса по каждому импульсу лазерного излучения, при этом фотодиод расположен на внешней стороне корпуса резонатора лазерного излучателя напротив зеркала с высоким коэффициентом отражения, а формируемые им электрические импульсы предназначены для заведения в измеритель временных интервалов в блоке цифровой обработки приемопередатчика.
| ЛАЗЕРНЫЙ ЦЕЛЕУКАЗАТЕЛЬ-ДАЛЬНОМЕР | 2004 |
|
RU2269093C1 |
| УНИВЕРСАЛЬНАЯ СИСТЕМА ТОПОПРИВЯЗКИ И НАВИГАЦИИ | 2011 |
|
RU2469271C1 |
| US 2007127008 A1, 07.06.2007 | |||
| WO 2011003814 A1, 13.01.2011 | |||

