Изобретение относится к океанографии и гидрологии, в частности к поверхностным дрейфующим и неподвижным плавучим островам, которые могут быть использованы для разнообразных научных исследований, для размещения на них контрольных, исследовательских и спасательных служб, в качестве морского курорта или базы отдыха, а также комфортабельного места проживания человека в океане и т.п.
Известно, что экваториальные области Тихого океана характеризуются уникальными погодными условиями: практическим отсутствием штормов, значительным преобладанием солнечных дней в году, постоянным направлением ветров, высоким температурным фоном и т.д. Все вышеперечисленное благоприятствует созданию на этих широтах, например, плавучих островов, где люди смогут отдыхать и работать.
В 1951 году в Тихом океане было обнаружено экваториальное подповерхностное противотечение, так называемое течение Кромвелла, толщиной до 250 м, шириной более 300 км. и находящееся на глубине (50-100) м. Впоследствии подобные течения были открыты в Атлантическом и Индийском океанах. Обнаруженные течения имеют скорость до 150 м/с, направлены вдоль экватора, но под углом 180 к поверхностному экваториальному течению (Ханайченко Н.К. Система экваториальных противотечений в океане. - Л.: Гидрометеоиздат, 1974, с. 158; Бурков В.А. Общая циркуляция мирового океана. - Л.: Гидрометеоиздат, 1980, с. 165).
До настоящего времени не ставилась задача использования этих течений в качестве экологически безопасного и неисчерпаемого источника энергии для приведения в движение какого-либо плавсредства, находящегося в этих широтах.
Известен плавучий остров, который выполнен в форме цветка и содержит автономный источник питания для поддержания жизнеобеспечения на острове (заявка Великобритании N 2097340, кл. В 63 35/44, 1982). Однако известный остров предназначен только для прибрежного использования, его располагают в тихих закрытых бухтах, и его невозможно использовать в открытом океане.
Известен плавучий остров для морских курортов, состоящий из пенопластовых полотен, связанный между собой (в.з. ФРГ N 3336352, кл. В 63 В 35/58, 1985). Однако данный остров неуправляем и может дрейфовать только по поверхностному течению или передвигаться за каким-либо судном на буксире.
Ни тот ни другой остров не используют для целей передвижения энергию подводных течений. Заявителю не удалось обнаружить источников информации, в которых бы описывались устройства, использующие энергию подводных течений для передвижения.
Наиболее близким к предлагаемому по совокупности признаков, является дрейфующая станция для океанографических исследований, содержащая буй с контейнером, а также связанный с буем тросом подводный парус, к которому прикреплен груз, причем узел крепления подводного паруса к тросу расположен в верхней части паруса (а.с. СССР N 1113303, кл. В 63 В 21/52, 1984). Описанная конструкция станции обеспечивает ее дрейф со скоростью, равной скорости поверхностного течения, и не позволяет изменять направление движения, двигаться против поверхностного течения или удерживаться в точке с заданными координатами. Парус данного устройства предназначен для гарантированного дрейфа буя со скоростью, равной скорости окружающей воды, то есть практически для уменьшения величины ветрового дрейфа.
Задача изобретения состоит в создании плавучего острова, который за счет использования энергии экваториального подповерхностного противотечения Тихого океана или иных подобных мест имеет возможность свободного перемещения в выбранном направлении или стояния в точке с заданными координатами в пределах указанных течений.
Поставленная задача достигается тем, что в предлагаемом плавучем острове, содержащем устройство с положительной плавучестью и связанный с ним подводный парус с прикрепленным к нему грузом, связь между устройством и парусом осуществляют системой тросов, нижние концы которых прикреплены к подводному парусу по его периметру, а верхние присоединены к устройству так, чтобы результирующая сила тяги паруса проходила через центр лобового сопротивления устройства или его проекцию на горизонтальную плоскость, при этом подводный парус выполнен с возможностью изменения угла атаки в горизонтальной и вертикальных плоскостях и содержит в своей верхней части поплавок.
Центр лобового сопротивления (ЦЛС) - центр тяжести проекции подводной части устройства на вертикальную плоскость, перпендикулярную к направлению его относительного движения.
Устройство с положительной плавучестью представляет из себя конструкцию, размеры и форма которой определяются назначением плавучего острова. Оно может состоять из модулей, обладающих положительной плавучестью, например понтонов или разного вида платформ, выполненных из различных подходящих материалов: пенопласта, пенобетона, металла или пластика и др. Модули соединяют вместе любыми известными способами, например: сварка, болтовое, шарнирное соединение и т.д.
Для плавного изменения величины, направления и точки приложения результирующей силы бокового и лобового сопротивления поверхностному течению воды на устройстве устанавливают шверты, которые для этого выполняют с возможностью поворота их вокруг вертикальной оси.
Кроме того, для усиления эргономических характеристик острова при использовании его в качестве места проживания, отдыха или работы людей устройство оборудуют системой ориентации острова по сторонам света, представляющей из себя, например, в качестве исполнительных двигателей пару обычных активных подруливающих устройств, широко применяемых в судостроении (Васильев А.В. , Белоглазов В. И. , Использование подруливающих устройств, М.: Транспорт, 1965, с. 68). Их располагают симметрично относительно центра бокового сопротивления подводной части устройства и разносят на расстояние, достаточное для создания необходимого момента вращения на плечах. Управление ими осуществляют с помощью автоматизированной системы от магнитного компаса или гирокомпаса, аналогично авторулевому, применяемому в судовождении и в авиации. (Березин С.Я., Тетютев Б.А. Система автоматического управления движением судна по курсу. - Ленинград, 1990, с. 225).
При установлении на устройстве с положительной плавучестью соответствующего судового дизельного двигателя плавучий остров приобретает способность самостоятельного выхода в заданную точку подобно морским судам.
На фиг. 1 схематично изображен общий вид плавучего острова; на фиг. 2 - схема, показывающая принцип управления движением плавучего острова; на фиг. 3 - схема, показывающая принцип управления движением плавучего острова (вид сверху).
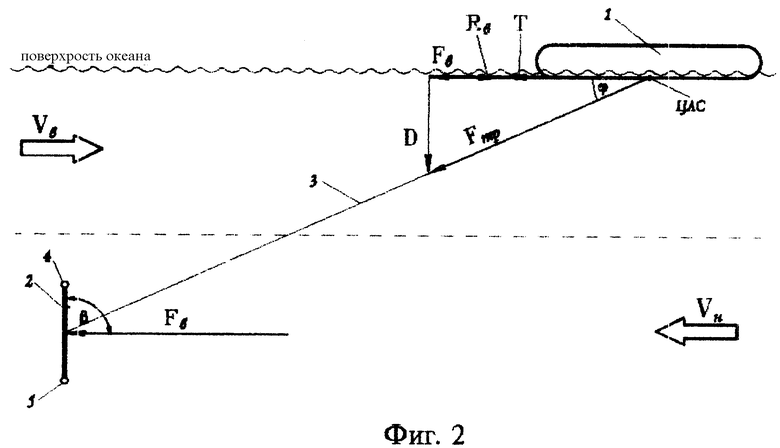
Плавучий остров состоит из устройства с положительной плавучестью 1, подводного паруса 2 и системы тросов 3лев, 3пр, 3в, 3н, которые соединяют между собой устройство и парус. На фиг. 2 и 3 для упрощения изложения система тросов условно заменена одним тросом 3, который изображен натянутым по прямой линии и который проходит через геометрический центр паруса (точка приложения результирующей силы натяжения тросов). Нижние концы тросов присоединены к парусу по его периметру, а верхние - к устройству таким образом, чтобы результирующая сила натяжения тросов проходила через центр лобового сопротивления (ЦЛС) подводной части устройства или его проекцию на горизонтальную плоскость. Причем каждый отдельно взятый трос своим верхним концом присоединен к лебедке, имеющей возможность как синхронного, так и раздельного их потравливания или выбирания. Лебедки устанавливают на рабочей площадке устройства (на фиг. 1 площадка не показана). Присоединение паруса к устройству описанным выше способом необходимо, чтобы избежать нежелательного момента вращения устройства вокруг его горизонтальной оси.
Подводный парус снабжен поплавком 4 и грузом 5, чтобы придать парусу устойчивое вертикальное положение.
Подводный парус служит для создания силы тяги, которая через систему тросов передается на устройство и приводит его в движение против и/или поперек поверхностного течения либо обеспечивает стояние острова в нужной точке. Помимо этого система тросов 3 дает возможность изменения угла атаки паруса как в горизонтальной, так и в вертикальной плоскостях посредством потравливания и выбирания отдельных тросов системы 3.
Подводный парус 2 может иметь любую форму: круг, прямоугольник, ромб, треугольник и т.д.; может быть жестким, мягким, комбинированным и быть выполненным из любого подходящего материала в зависимости от расчетного срока службы.
Изменение формы и жесткости подводного паруса ведет только к изменению количества тросов, задействованных в управлении этим парусом, но не оказывает влияния на принцип управления парусом.
Площадь подводного паруса 2 в каждом конкретном случае подбирается опытным путем. Она зависит от размера устройства, скорости противотечения, глубины погружения паруса, формы паруса и т.д.
Вес балласта 5 подводного паруса 2 выбирается из расчетного оптимального угла наклона ϕ связывающей системы тросов 3 для создания на них максимальной силы тяги Т и рассчитывается для каждого конкретного случая или подбирается опытным путем на месте.
Глубина погружения подводного паруса 2 определяется глубиной прохождения нижнего противотечения и регулируется изменением длины системы связывающих тросов 3 при постоянном весе самого паруса и/или изменением угла атаки паруса вертикальной плоскости.
Управление парусом осуществляют следующим образом. Выбирая, например, трос 3в и потравливая соответственно трос 3н уменьшают угол атаки β в вертикальной плоскости так, что возникшая на парусе подъемная сила поднимает парус вверх и, наоборот, потравливая трос 3в и выбирая трос 3н заставляют двигаться парус вниз, то есть таким образом осуществляют управление заглублением паруса, не изменяя длины системы связывающих тросов 3, не изменяя при этом угол  между системой тросов 3 и горизонтальной поверхностью океана, регулируя таким образом силу тяги Т. Для увеличения или уменьшения глубины погружения паруса соответственно увеличивают или уменьшают длину системы связывающих тросов, не изменяя при этом угла ϕ, то есть оставляя его оптимальным для данного веса паруса. Аналогичным образом, соответствующей парой тросов 3пр и 3лев изменяют угол атаки α паруса в горизонтальной плоскости, заставляя парус двигаться вправо или влево.
между системой тросов 3 и горизонтальной поверхностью океана, регулируя таким образом силу тяги Т. Для увеличения или уменьшения глубины погружения паруса соответственно увеличивают или уменьшают длину системы связывающих тросов, не изменяя при этом угла ϕ, то есть оставляя его оптимальным для данного веса паруса. Аналогичным образом, соответствующей парой тросов 3пр и 3лев изменяют угол атаки α паруса в горизонтальной плоскости, заставляя парус двигаться вправо или влево.
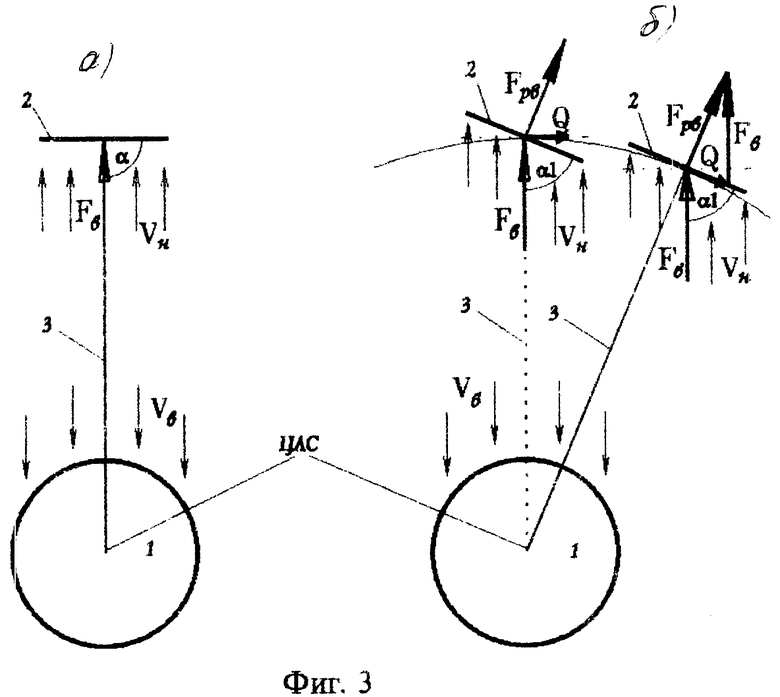
На фиг. 2 изображена схема работы подводного паруса 2 в виде проекции на вертикальную плоскость. Под действием течения на парус давит некоторая масса воды с силой Fв, направленной по соответствующему течению, двигающемуся со скоростью Vн. На системе тросов 3 возникает сила натяжения Fтр, направленная вдоль тросов под углом ϕ к поверхности океана. Из треугольника сил Fтр, Fв, D, где D - сила веса паруса, видно, что сила давления на парус воды Fв двигает устройство 1 против поверхностного течения. Если сила сопротивления воды Rв движению устройства 1 будет меньше силы давления воды на парус Fв, то возникает сила тяги Т
Т = Fв - Rв
В случае, если сила Т будет больше силы Rн, система плавучего острова будет двигаться против верхнего течения, так как сила сопротивления воды Rв постоянна для данной системы, а сила тяги Т находится в прямой зависимости от величины силы давления воды Fв и в свою очередь зависит только от площади самого подводного паруса. Скорость такого движения не может превышать скорости нижнего противотечения.
При Fв = Rв, то есть Т = Fв - Rв = O, плавучий остров стоит на месте, имея относительную скорость, равную по модулю скорости верхнего течения.
Данный частный случай изображен также и на фиг. 3а, где представлена схема работы плавучего острова, но на виде сверху, то есть верхнее и нижнее течения горизонтальны и направлены под углом 180o друг к другу, и угол атаки α подводного паруса 2 в горизонтальной плоскости равен 90o.
На фиг. 3б изображен случай движения системы плавучего острова, когда верхнее и нижнее течения горизонтальны, но угол атаки паруса в горизонтальной плоскости α меньше 90o. Уменьшая в исходном состоянии (пунктирная линия) угол α до угла α1 изменяем направление реакции силы Fр.в, то есть она, оставаясь перпендикулярной к поверхности паруса 2, рождает силу Q, направленную по касательной к окружности с радиусом, равным проекции системы тросов на горизонтальную плоскость, и смещает парус 2 вправо, увлекая за собой и устройство 1. Под действием силы Q парус 2 смещается вправо относительно устройства 1 до тех пор, пока не установится равновесие между силой Q, смещающей парус вправо, и силой реакции от силы трения системы тросов и самого паруса о воду, смещающей парус вместе с тросами влево, и вся система плавучего острова будет находиться в равновесии и двигаться вправо поперек поверхностного течения. Аналогичным образом осуществляется поперечное движение влево.
Как видно из вышеизложенного, для задания плавучему острову определенного состояния (движения или стояния в точке с заданными координатами) всегда можно подобрать параметры (длина системы тросов 3, углы атаки в горизонтальной α и вертикальной β плоскостях и т.д.), при которых плавучий остров как система сам приходит в равновесие, сохраняя его неограниченно долго.
Таким образом, предлагаемый плавучий остров, помещенный в экваториальную зону Тихого океана или любого другого места, имеющего сходные условия, используя энергию подповерхностных противотечений для своего передвижения, служит идеальным местом как для работы, так и для отдыха человека.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЛАВУЧИЙ ОСТРОВ | 2014 |
|
RU2545128C1 |
| ПОДВОДНЫЙ ТРАНСПОРТНЫЙ ТОННЕЛЬ | 2020 |
|
RU2752839C1 |
| РАДИОТЕЛЕМЕТРИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ГИДРОМЕТЕОРОЛОГИЧЕСКИХ ПАРАМЕТРОВ В ПРИБРЕЖНОЙ ЗОНЕ МОРЯ | 2021 |
|
RU2810706C2 |
| Способ определения опасности цунами | 2020 |
|
RU2738589C1 |
| САМОХОДНЫЙ НАДВОДНО-ПОДВОДНЫЙ ОСТРОВ | 2009 |
|
RU2399549C1 |
| САМОХОДНЫЙ НАДВОДНО-ПОДВОДНЫЙ ОСТРОВ-ГИДРОАЭРОДРОМ | 2009 |
|
RU2410283C1 |
| КОМПЛЕКС ДЛЯ РАЗРАБОТКИ ПОДВОДНЫХ МЕСТОРОЖДЕНИЙ ПОЛЕЗНЫХ ИСКОПАЕМЫХ | 2006 |
|
RU2349489C2 |
| СПОСОБ УПРАВЛЕНИЯ ДИФФЕРЕНТОМ БУКСИРУЕМОГО ПОДВОДНОГО ОБЪЕКТА | 2017 |
|
RU2657701C1 |
| СОЛНЕЧНАЯ ЭНЕРГЕТИЧЕСКАЯ СИСТЕМА | 2004 |
|
RU2289765C2 |
| ГИДРОДИНАМИЧЕСКИЙ ЯКОРЬ | 2020 |
|
RU2751044C1 |
Плавучий остров предназначен для размещения на нем контрольных, спасательных служб, морского курорта или базы отдыха, а также комфортабельного места проживания человека в океане. К подводной части плавучего острова путем системы тросов присоединяют подводный парус с возможностью изменения угла атаки паруса как в горизонтальной, так и вертикальной плоскостях. Система тросов присоединена одним концом по периметру паруса, а другим проходит через центр лобового сопротивления подводной части острова. Парус содержит поплавок и груз. 3 з.п. ф-лы, 3 ил.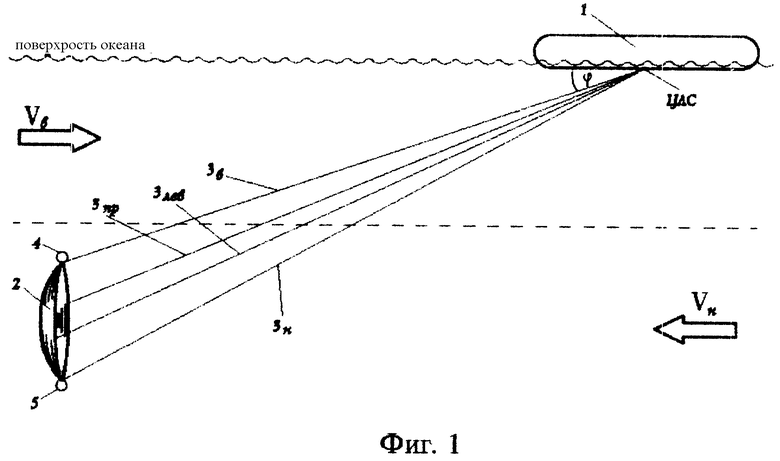
| SU, Авторсткое свидетельство N 1113303, кл | |||
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |

