Изобретение относится к области морского судоходства и может быть использовано в спасательных шлюпках и маломерных судах - плавающих объектах.
Известен плавучий якорь [1. Шарлай Г.Н. Управление морским судном. - Владивосток: МГУ им. адм. Г.И. Невельского, 2013. - 574 с. - С. 404; 2. Морской энциклопедический справочник. В 2 томах. Т. 2 О - Я / Под ред. акад. Н.Н. Исанина. - Л.: Судостроение, 1987. - 520 с. - Статья «Плавучий якорь», с. 87.], содержащий тканевый купол, соединенный тросом со спасательной шлюпкой на поверхности воды, и вспомогательные детали на поверхности купола.
Плавучий якорь выпускается с плавающего объекта на длину троса, от дрейфа плавающего объекта раскрывается в воде и оказывает сопротивление дрейфу. В раскрытом состоянии плавучий якорь находится в тех же верхних слоях воды, что и плавающий объект, поэтому способен оказывать пассивное сопротивление в основном ветровому дрейфу.
Известен плавучий якорь [Патент РФ №2326018 С1 МПК В63В 21/48 (2006.01) авторов Бойко А.В., Прокофьев В.В., Чикаренко В.Г.], отличающийся тем, что его упругая основа, состоящая из кольчужного пластыря, обшитого парусиной и закрепленного в подводной части носовой оконечности судна, при взаимодействии с потоком жидкости на волнении создает гидродинамическую силу, вертикальная составляющая которой N уменьшает амплитуду качки, а горизонтальная составляющая Т создает дополнительную тяговую силу.
Известен волнодвижитель парус-решетка [Патент РФ №2540156 МПК В63Н 19/02 авторов Архангельский Е.А., Ерошин В.А., Размыслов В.Ф., Прокофьев В.В., Чикаренко В.Г., Яковлев Е.А.], представляющий собой набор коротких по длине подводных парусов, закрепленных на кронштейне в районе носовой оконечности судна, при качке которого и взаимодействии набегающего потока с парусами на последних возникает тяговая сила Т, которая и движет корабль. Этот аналог выбран в качестве прототипа заявляемого изобретения.
Указанные устройства работают в тех же слоях воды относительно судна, в которых орбитальное волновое движение жидкости практически не отличается от поверхностного, в котором находится судно. При этом перемещение судна относительно взволнованной поверхности воды может быть значительным только при резонансных и околорезонансных явлениях, наступающих при сближении собственных частот качки судна и частот волнения, когда длина волны близка к длине судна. Если же длина маломерного судна (включая спасательные шлюпки и плоты) намного меньше длины волны, что характерно для морских условий, то относительное перемещение судна к волновому профилю невелико, хотя вертикальное перемещение судна вместе с волной относительно неподвижной системы координат может быть и значительным. При этом эффективность указанных аналогов в качестве плавучего якоря или волнодвижителя также невелика. В этом случае плавучие якоря способны оказывать пассивное сопротивление только ветровой составляющей дрейфа спасательных средств, несколько снижая скорость дрейфа, а указанный волнодвижитель и этой функции не выполняет.
Заявляемое изобретение нацелено на компенсацию как ветровой, так и волновой составляющих дрейфа плавающего объекта и, тем самым, на стабилизацию его позиционирования.
Технический результат заявляемого изобретения состоит в замене пассивного сопротивления плавучего якоря на активную гидродинамическую силу гидродинамического якоря, который для своей работы использует энергию волнения, накопленную судном в виде его вертикального колебательного перемещения относительно неподвижной системы координат. В качестве аналога неподвижной системы координат используются глубинные слои воды, в которых волновое орбитальное движение затухает по экспоненциальному закону и в которые помещается заявляемое устройство гидродинамического якоря. Таким образом, итоговым техническим результатом заявляемого изобретения является преобразование энергии волнения в работу против сил дрейфа плавающего объекта.
Гидродинамические силы, возникающие на заявляемом устройстве, расположенном в нижележащих слоях воды относительно плавающего объекта, имеют горизонтальную составляющую, которая может компенсировать ветро-волновое сопротивление плавающего объекта, обеспечивая стабилизацию его позиционирования.
Возникновение гидродинамических сил происходит вследствие подъема плавающего объекта на переднем склоне волны и передачи этого движения через гибкую связь на подводные элементы заявляемого устройства. Форма, расположение и взаимодействие этих элементов способствуют возникновению на них гидродинамических сил при движении устройства вверх.
На заднем склоне волны плавающий объект опускается, натяжение гибкой связи ослабевает, а подводные элементы заявляемого устройства опускаются под собственным весом, сохраняя необходимое пространственное положение благодаря предусмотренным изменениям во взаимодействии элементов заявляемого устройства. В результате за период волны плавающий объект (например, спасательная шлюпка, маломерное судно) позиционируются в среднем практически на постоянном месте.
Указанный технический результат имеет социально-экономическую значимость. Площадь поиска спасательных средств от места их спуска на воду до места их обнаружения пропорциональна квадрату расстояния дрейфа, поэтому снижение дрейфа в n раз уменьшает площадь поиска в n2 раз. Это повышает эффективность поисково-спасательных операций Спасательно-Координационных Центров (СКЦ) и увеличивает вероятность выживания спасающихся людей на этих спасательных средствах. В этом состоит социально - экономический эффект и поставленная задача заявляемого изобретения.
Указанная задача стабилизации позиционирования плавающего объекта достигается тем, что гидродинамический якорь, содержащий подводные крылья и соединенный с плавающим объектом, отличается тем, что имеет раму, содержащую центральный и два боковых киля, соединенных между собой двумя парами нижних и двумя верхними поперечными связями, на передние поперечные связи нижних пар установлены подводные крылья с возможностью ограниченного поворота вокруг этих связей, причем задние поперечные связи нижних пар ограничивают возможность поворота крыльев вниз, а верхние поперечные связи ограничивают возможность поворота крыльев вверх. Соединение рамы с плавающим объектом выполнено гибкой связью, закрепленной в двух точках на центральном киле с обеспечением необходимого угла атаки между гибкой связью и плоскостью рамы. Гибкая связь с боковыми килями соединена оттяжками.
Существенные признаки заявляемого изобретения связаны с достигаемым техническим результатом следующим образом.
Рама гидродинамического якоря является конструктивным элементом, обеспечивающим основные габаритные размеры устройства, его прочность и жесткость, крепление подводных крыльев и необходимые углы их установки, погружение гидродинамического якоря под действием собственного веса в глубинные слои воды.
При правильно установленных ограничителями углах атаки подводные крылья обеспечивают возникновение гидродинамических сил, необходимых для выполнения основной функции гидродинамического якоря в рабочем цикле (при нахождении плавающего объекта на переднем склоне волны) и возврат рамы в глубинные слои воды с сохранением необходимого пространственного положения в подготовительном цикле (при нахождении плавающего объекта на заднем склоне волны).
Гибкая связь обеспечивает допустимое погружение рамы гидродинамического якоря в глубинные слои воды с иными волновыми амплитудно-фазовыми соотношениями сравнительно с плавающим объектом, а также передачу на плавающий объект гидродинамической нагрузки, возникающей на гидродинамическом якоре в рабочем цикле.
Крепление гибкой связи к раме гидродинамического якоря в двух точках центрального киля рамы обеспечивает свободу угловых перемещений крыльев в заданных пределах и расположение рамы относительно линии гибкой связи на необходимый угол атаки, который обеспечивает требуемый характер стабилизации позиционирования, то есть задает необходимое выдвижение плавающего объекта навстречу волнам.
Оттяжки боковых килей предупреждают нарушение фронтального расположения рамы в процессе работы гидродинамического якоря.
Ограничители поворота крыльев вниз обеспечивают такое положение крыльев в раме, при котором гидродинамические силы, возникающие на крыльях при подъеме рамы, приобретают необходимое направление для компенсации ветро-волнового дрейфа плавающего объекта.
Ограничители поворота крыльев вверх обеспечивают такое положение крыльев в раме, при котором гидродинамические силы, возникающие на крыльях при опускании рамы, приобретают необходимое направление для смещения гидродинамического якоря навстречу волнению с сохранением пространственного положения рамы.
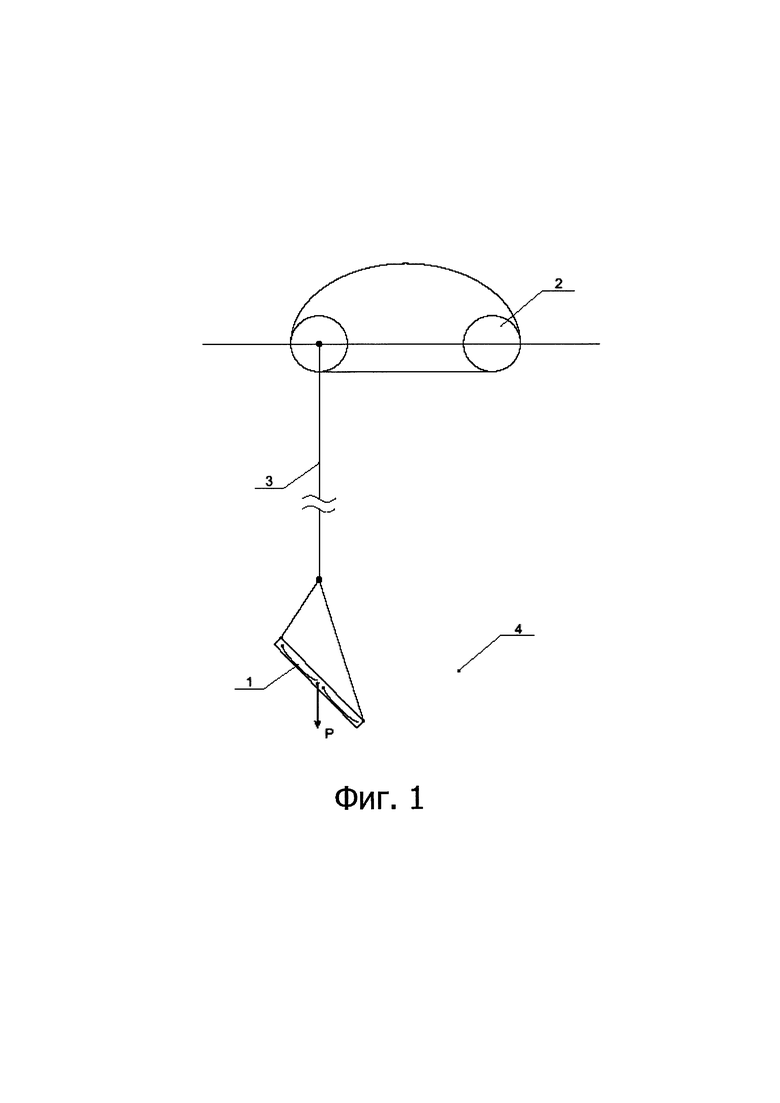
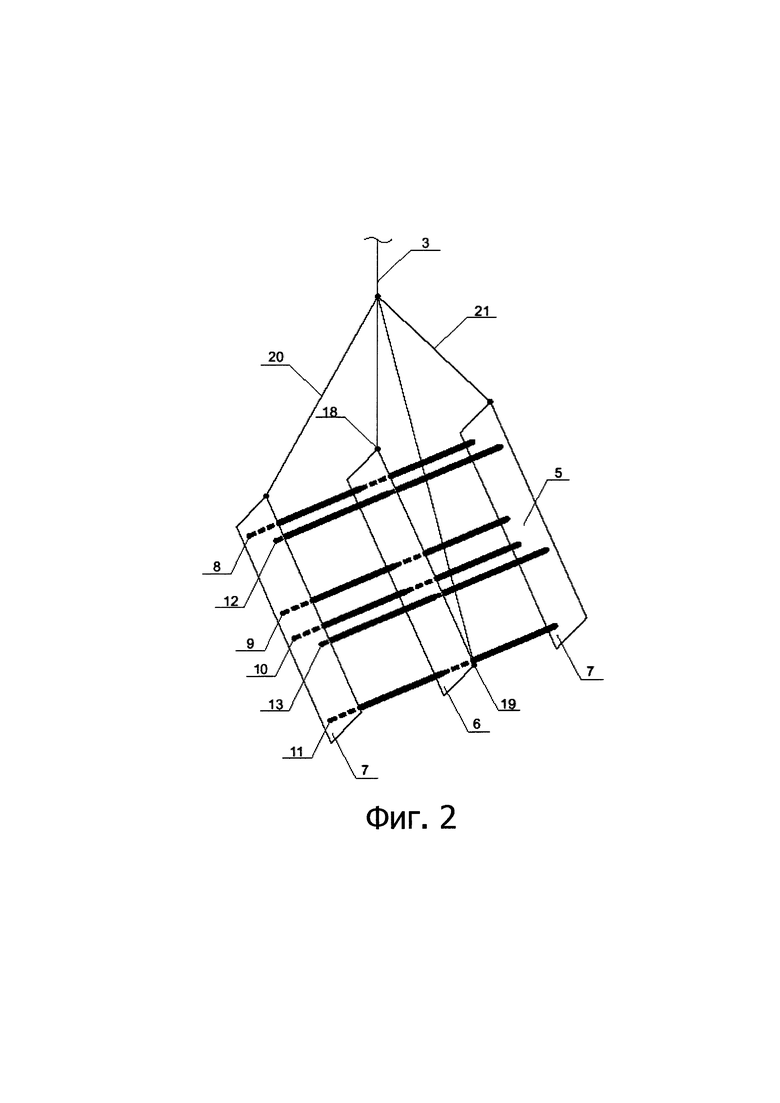
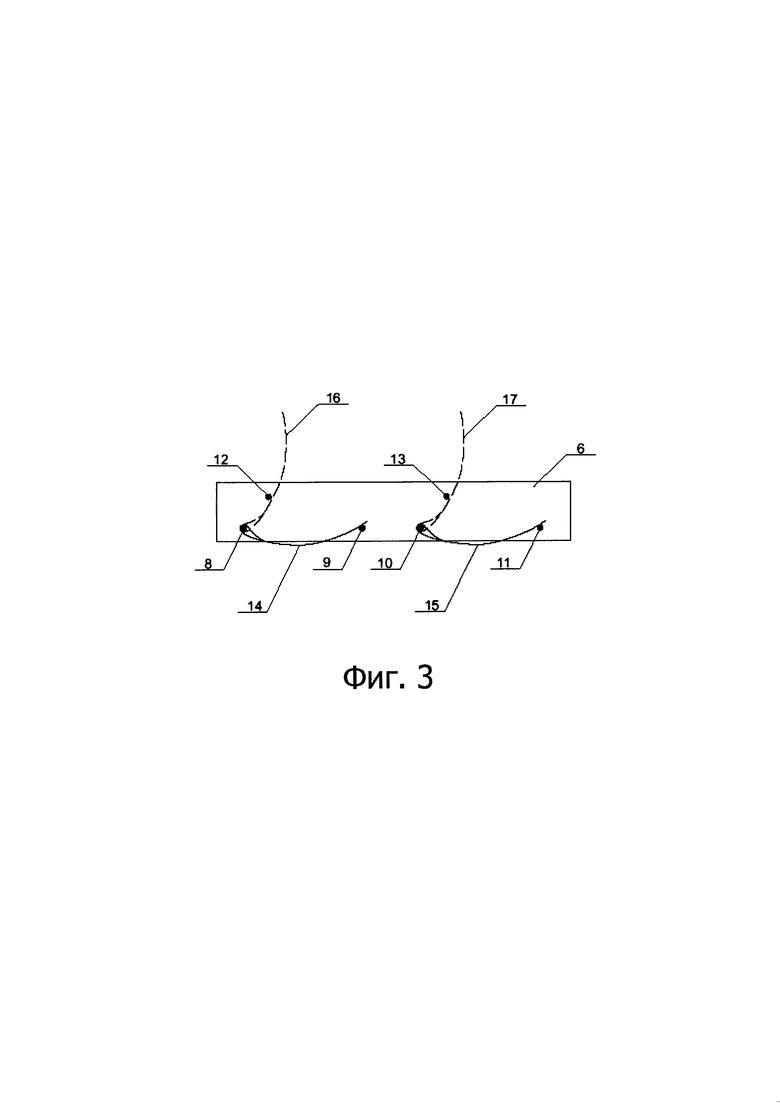
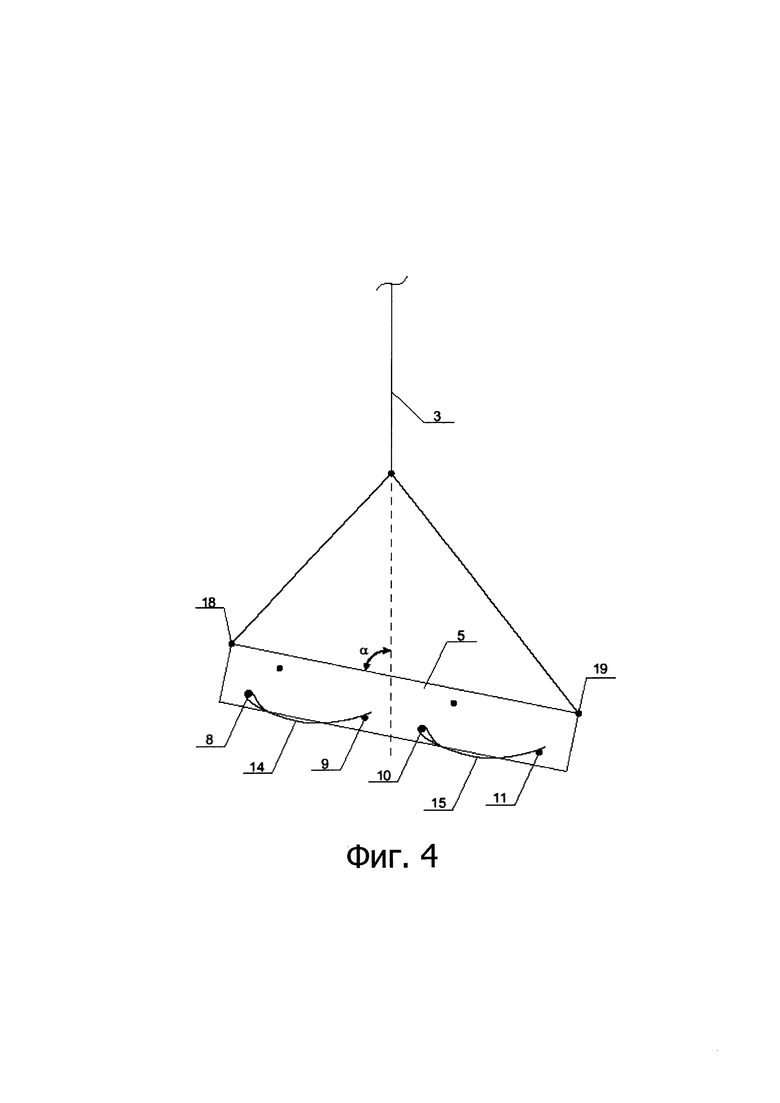
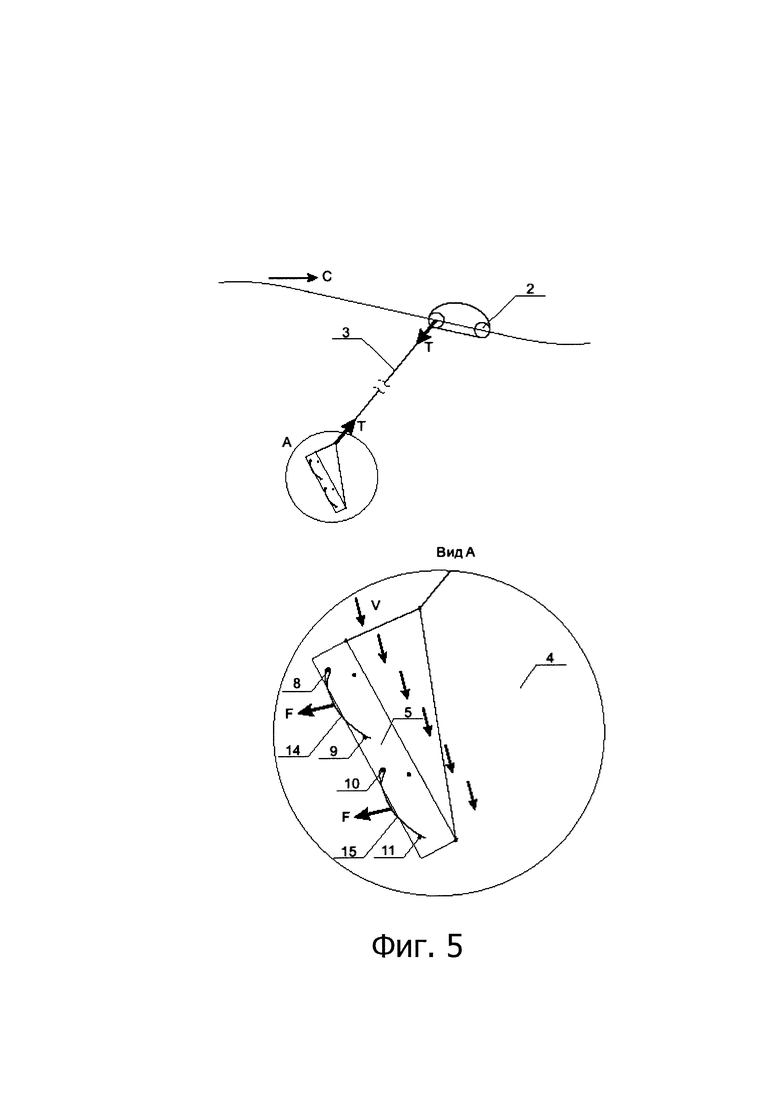
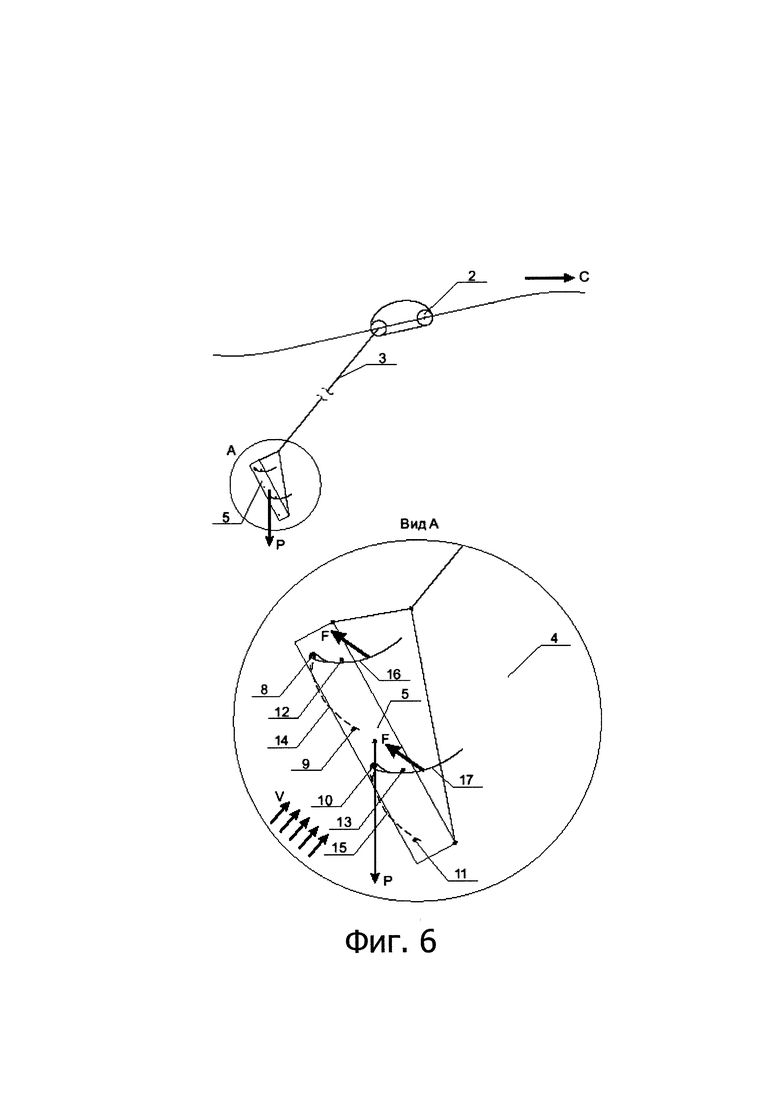
На фиг. 1 показан общий вид плавающего объекта с гидродинамическим якорем. На фиг. 2 показана схема элементов рамы. На фиг. 3 представлено сечение гидродинамического якоря с подводными крыльями и поперечными связями рамы. На фиг. 4 показано крепление гибкой связи к центральному килю рамы с обеспечением необходимого угла атаки гибкой связи с плоскостью рамы. На фиг. 5 показано взаимодействие элементов гидродинамического якоря в рабочем цикле на переднем склоне волны. На фиг. 6 показано взаимодействие всех элементов гидродинамического якоря на заднем склоне волны.
Гидродинамический якорь 1 соединен с плавающим объектом 2 гибкой связью 3 и погружен в нижние слои воды 4 собственным весом Р, фиг. 1. Гидродинамический якорь 1 имеет раму 5, фиг. 2, содержащую центральный 6 и два боковых 7 киля. Кили 6 и 7 соединены между собой двумя парами 8, 9 и 10, 11 нижних поперечных связей и двумя верхними поперечными связями 12, 13. На передних нижних поперечных связях 8, 10 установлены подводные крылья 14, 15, фиг. 3. Подводные крылья 14, 15 имеют возможность поворота до положения 16, 17 вокруг нижних поперечных связей 8, 10. Поворот крыльев до положения 14, 15 ограничивается нижними поперечными связями 9, 11. Поворот крыльев до положения 16, 17 ограничивается верхними поперечными связями 12, 13. Гибкая связь 3 закреплена в двух точках 18, 19 на центральном киле 6 с обеспечением угла атаки а между гибкой связью 3 и плоскостью рамы 5, фиг. 4. Гибкая связь 3 соединена оттяжками 20, 21 и боковыми килями 7, фиг. 2.
Гидродинамический якорь 1 работает следующим образом.
На переднем склоне волны, перемещающейся с фазовой скоростью С, фиг. 5, плавающий объект 2 поднимается на некоторую высоту ζ над неподвижной системой координат (например, над уровнем подошвы волны) и смещается по ходу волны от ветро-волнового воздействия. Гибкая связь 3 натягивается и увлекает за собой натяжением Т раму 5, обеспечивая обтекание ее потоком воды со скоростью v. Подводные крылья занимают положение 14, 15, прижимаясь потоком воды к поперечным связям 9, 11. На подводных крыльях 14, 15, расположенных к потоку воды под некоторым углом атаки α, возникает гидродинамическая сила F, равнодействующая которой передается гибкой связи 3 в виде натяжения Т. Натяжение Т гибкой связи 3 передается на плавающий объект 2, где горизонтальная составляющая натяжения Тх препятствует ветро-волновому сносу плавающего объекта 2 и обеспечивает ему стабилизацию позиционирования.
Вертикальная составляющая Tz компенсируется плавучестью плавающего объекта 2, уменьшая его килевую качку. Этот процесс - рабочий цикл - продолжается до подхода к плавающему объекту 2 вершины волны.
После прохождения вершины волны плавающий объект 2 оказывается на заднем склоне волны и его высота ζ над уровнем неподвижной системы координат (например, подошвой волны) уменьшается, фиг. 6. Натяжение Т гибкой связи 3 ослабевает, гидродинамический якорь 1 под собственным весом Р опускается. Гидродинамическая сила F от изменившегося направления потока v меняет направление, подводные крылья поворачиваются вокруг связей 8, 10 и занимают положение 16, 17. Вертикальная составляющая гидродинамических сил F уменьшает действие силы веса Р и снижает скорость погружения, а горизонтальная составляющая обеспечивает перемещение гидродинамического якоря навстречу движению волны (в направлении -С), сохраняя его пространственное положение, необходимое для рабочего цикла. Таким образом, гидродинамический якорь 1 занимает исходное положение в нижних слоях воды перед приходом следующего переднего склона волны, после чего цикл преобразования энергии волны в работу против сил дрейфа плавающего объекта повторяется.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРОДИНАМИЧЕСКИЙ ЯКОРЬ | 2022 |
|
RU2785310C1 |
| ГИДРОДИНАМИЧЕСКИЙ ЯКОРЬ | 2022 |
|
RU2792851C1 |
| СТАБИЛИЗАТОР ПОЗИЦИОНИРОВАНИЯ ПЛАВАЮЩЕГО ОБЪЕКТА (ВАРИАНТЫ) | 2020 |
|
RU2743456C1 |
| СТАБИЛИЗАТОР ПОЛОЖЕНИЯ НЕУПРАВЛЯЕМОГО ОБЪЕКТА | 2022 |
|
RU2785309C1 |
| ГИДРОАЭРОДИНАМИЧЕСКОЕ СУДНО "ВЕТРОВОЛНОХОД" | 1992 |
|
RU2048387C1 |
| ВОЛНОДВИЖИТЕЛЬ ПАРУС-РЕШЁТКА | 2013 |
|
RU2540156C1 |
| Судовой волновой движитель | 1988 |
|
SU1726310A1 |
| СПАСАТЕЛЬНЫЙ ЭКРАНОПЛАН | 2013 |
|
RU2546357C2 |
| ПЛАВУЧИЙ ЯКОРЬ | 2006 |
|
RU2326018C1 |
| СИСТЕМА ПРЕДОТВРАЩЕНИЯ БРОЧИНГА | 2021 |
|
RU2781020C1 |
Изобретение относится к морскому судоходству и может быть использовано в спасательных шлюпках и маломерных судах. Гидродинамический якорь содержит подводные крылья и соединен с плавающим объектом, а также содержит раму, включающую центральный и два боковых киля, соединенных между собой двумя парами нижних и двумя верхними поперечными связями. На передние связи нижних пар поперечных связей установлены подводные крылья с возможностью ограниченного поворота вокруг этих связей. Задние поперечные связи нижних пар ограничивают возможность поворота крыльев вниз, а верхние поперечные связи ограничивают возможность поворота крыльев вверх, а соединение рамы с плавающим объектом выполнено гибкой связью, закрепленной в двух точках на центральном киле рамы с обеспечением необходимого угла атаки между гибкой связью и плоскостью рамы и соединенной оттяжками с боковыми килями. Достигается преобразование энергии волнения в работу против сил дрейфа плавающего объекта. 6 ил.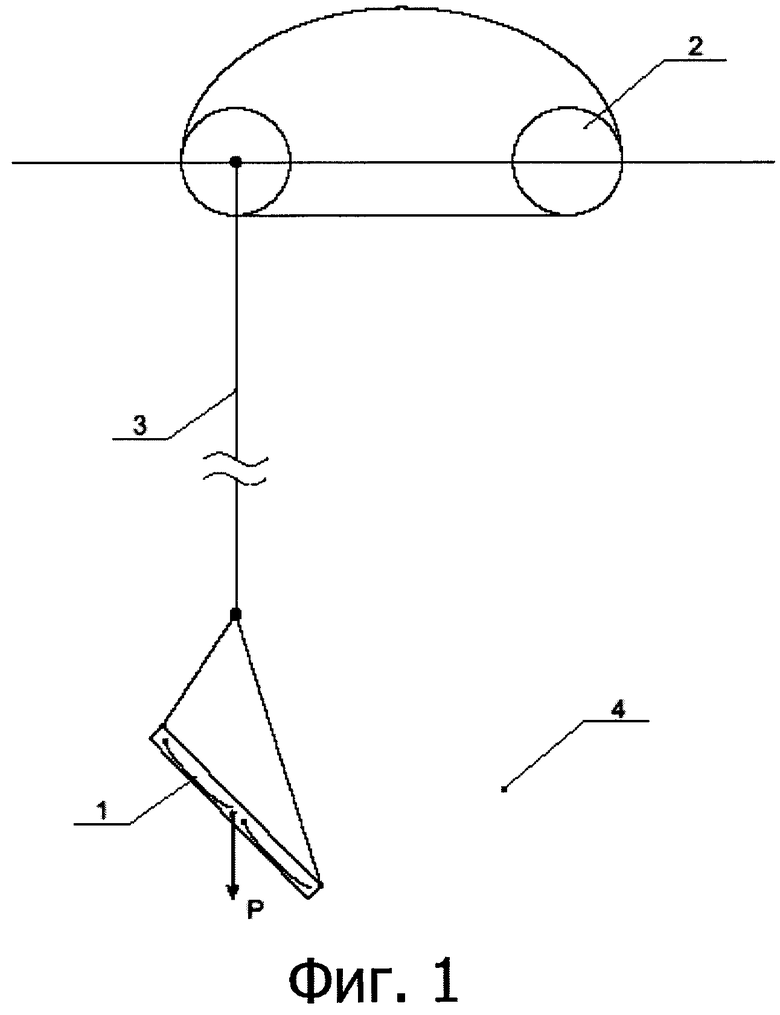
Гидродинамический якорь, содержащий подводные крылья и соединенный с плавающим объектом, отличающийся тем, что содержит раму, включающую центральный и два боковых киля, соединенных между собой двумя парами нижних и двумя верхними поперечными связями, на передние связи нижних пар поперечных связей установлены подводные крылья с возможностью ограниченного поворота вокруг этих связей, причем задние поперечные связи нижних пар ограничивают возможность поворота крыльев вниз, а верхние поперечные связи ограничивают возможность поворота крыльев вверх, а соединение рамы с плавающим объектом выполнено гибкой связью, закрепленной в двух точках на центральном киле рамы с обеспечением необходимого угла атаки между гибкой связью и плоскостью рамы и соединенной оттяжками с боковыми килями.
| ВОЛНОДВИЖИТЕЛЬ ПАРУС-РЕШЁТКА | 2013 |
|
RU2540156C1 |
| ПАРУСНЫЙ НАДВОДНО-ПОДВОДНЫЙ КОРАБЛЬ КУЩЕНКО В.А. | 2009 |
|
RU2403171C1 |
| US 20020078872 A1, 27.06.2002. | |||

