Настоящее изобретение относится к расшифровке сейсмических данных. Конкретно настоящее изобретение относится к машинному процессу выбора трехмерных сейсмических данных для формирования у специалистов в области нефтеразведки более четкого представления о геологическом строении и геометрии разреза. Более конкретно изобретение представляет собой наиболее точный и быстрый автоматизированный способ "выделения", или "отслеживания" отдельных сейсмических событий, или горизонтов, посредством трехмерных массивов данных.
На фиг. 1 - 4 проиллюстрированы особенности используемые в способах выделения, соответствующих предшествующему уровню техники.
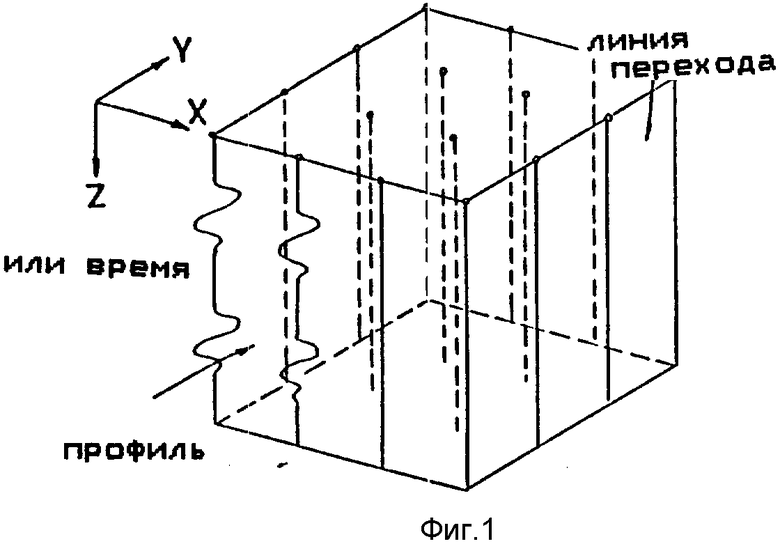
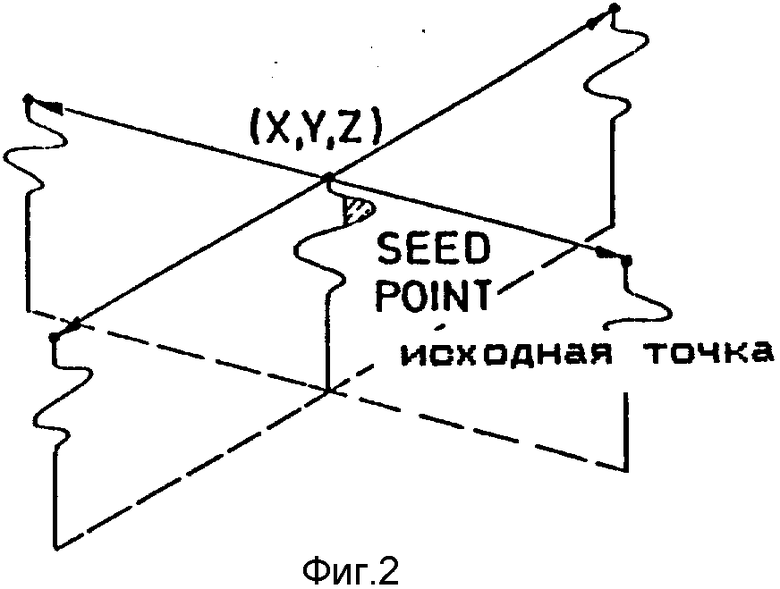
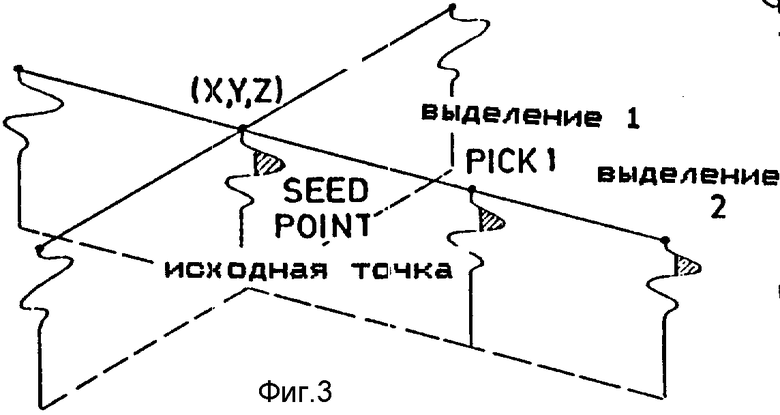
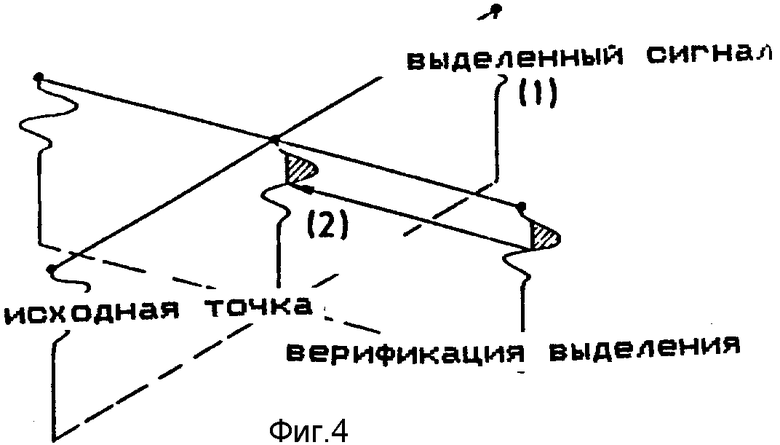
На фиг. 1 приведено изображение части гипотического массива трехмерных сейсмических данных, которое дано для того, чтобы пояснить трехмерные зависимости, встречающиеся в тексте описания и сопуствующих чертежах настоящей заявки; на фиг. 2 - изометрическая проекция пяти сейсмических сигналов, которые иллюстрируют соотношение между некоторой "исходной точкой" и четырьмя соседними сигналами; на фиг. 3 - способ автоматизированного выделения по предшествующему уровню техники; на фиг. 4 - "итеративный" способ автоматизированного отслеживания по предшествующему уровню техники. На фиг. 1 приведено изображение части гипотического массива трехмерных сейсмических данных. Маленькие окружности в верхней части этого массива изображает наземное положение отдельных сигналов. Вертикальные линии изображают сейсмические сигналы, которые замерены по полному времени пробега вдоль оси этого массива. Такой пробег соответствует расстоянию или глубине, на которой генерируется импульс. Каждый отдельный сигнал является отображением акустических отражений от напластований в недрах земли в координатах "амплитуда-время". Фиг. 1 является наглядной иллюстрацией способа фактического представления каждого сигнала сейсмограммы. Каждый сигнал хранится в виде последовательности дискретных чисел, представляющих амплитудное значение сигнала по отношению к нулевой величине. Для адекватного представления любого числа, соответствующего амплитуде, необходимо использовать несколько "разрядов" (разряд - это двоичное число, принимающее два значения: 0 и 1). Как правило используется восемь, шестнадцать или тридцать два разряда. Такое представление числа разрядами повторяется для каждой точки времени, например, через 2- или4-миллисекундный интервал в течении шести секунд.
Горизонтальное сечение, или временной срез представляет собой горизонатальный срез, или сечение, трехмерного массива данных. Оно показывает различные напластования в один и тот же момент времени. С другой стороны, карту горизонта или просто горизонт получают построение графика какого-либо атрибута конкретного импульса (обычно длительности импульса, иногда - максимальной или минимальной амплитуды) в координатах X-Y. Горизонт напоминает топографическую карту поверхности, однако является графическим изображение подповерхностных напластований. Атрибуты горизонта могут выделятся цветом, видом и т. п.
Менее чем за десять лет компьютеризированная геологоразведка революционизировала сейсморазведку и разработку месторождений. Однако до недавнего времени один аспект расшировки сейсмических данных - выделение подповерхностных горизонтов (или просто выделение) оставался практически на уровне работы с карандашом и бумагой без использования автоматизированных компьютерных методов выделения.
Традиционно выделение считают трудоемким процессом, поскольку производилось вручную, путем вычерчивания цветными карандашами одного за другим сейсмических размеров или профилей. В начале 80-х годов автоматизированные рабочие места САЕХ (аббревиатура названия "Разведка с помощью компьютера") предоставили специалистам в области сейсморазведки возможность выделять трехмерные данные с большей скоростью и эффективностью. Хотя расшифровка сейсмических профилей (т.е. двухмерных вертикальных сечений или "вертикальных сейсмических разрезов") все еще осуществлялась визуально - выделением одного профиля за другим, это стало возможным делать с использованием "мыши" на экране компьютера, устанавливая курсор на некоторые выбранные точки на каком-либо горизонте с последующим выделением компьютером всех остальных точек на этом профиле. Это явилось первым примером автоматизированного выделения, которое по сравнению с ручным позволяло увеличить не только производительность но и точность.
В одной из предшествующих автоматизированных систем для выделения плоскости напластования (или формаций, или просто "горизонта") в существенно горизонтальном направлении через трехмерный массив данных пользователь выбирал (или "вводил") по крайне мере одну "исходную точку", которая затем "распространялась" по всем четырем направлениям в массиве трехмерных данных так, как это показано на фиг. 2, до тех пор пока не достигала границ определенной пользователем зоны. Пользователи могли выбирать между выделением сейсмических данных в одномодовом в двухмодовом режиме. "Исходная точка" определяется своими координатами X и Y, а также своим временем или глубиной (т.е. осью Z на фиг. 1). Она также определяется характеристикой или параметром отражения в этой точке. Такой характеристикой обычно является максимальная амплитуда отражения в этом месте массиве данных. Могут быть использованы и другие параметры или характеристики отражения в точке X, Y, Z, например, минимальная амплитуда, фаза, частота и т.п. Как показано на фиг. 3, при неинтеративном выделение проводился поиск сейсмических сигналов со сходными значениями амплитуды, прилегающих к исходным точкам, выбирался наилучший из них, а затем анализировался следующий имеющийся сигнал без перепроверки точности выборки.
Итеративный режим выделения верефицировал соседний сигнал в качестве выделенного с использованием предыдущего сигнала. Верифицированный соседний сигнал рассматривался в качестве исходной точки, и выделение соседних сигналов продолжалось с него. Такой итеративный процесс, известный из предшествующего уровня техники, показан на фиг. 4. Верификация при проверке означает, что если величина амплитуды выделенного сигнала находится в пределах заданного пользователем допуска, то это выделение принимается. Пользователи могут устанавливать степень схожести (по шкале 1 - 10). Если выделенный сигнал не выдерживал такой проверки, он объявлялся "потерянным" до появления по крайней мере одного непосредственно соседствующего с ним сигнала достаточно совпадающего с ним.
Более конкретно, как только на сигнале выбиралась исходная точка, сигнал сканировался вверх и вниз по оси Z, или оси времени, с целью нахождения локальных максимальных амплитуд, или просто "экстремумов". Локальный экстремум величины Xi, где i - показатель отцифровывания, определяется как:
Xi-1<Xi>Xi+1 или
Xi-1>XXi<Xi+1
В случае максимума или минимума такое сканирование ограничивается точками перехода амплитуды сигнала через ноль. Подобный экстемум обычно немного варьирует с течением времени. Например, если t0 представляет исходную точку, то t1 обычно представляет время экстремума. Затем время t0 начинается на целевом сигнале. На целевом сигнале время варьирует вверх и вниз в диапазоне между точками перехода амплитуды сигнала через ноль до тех пор, пока не будет найден ближайший экстремум t2. Наконец, время t2 используют на сигнале, на котором существует исходная точка, и на таком"исходном" сигнале опять осуществляют сканирование вдоль оси Z для поиска ближайшего экстремума E3. Если t3 равно t1, то цель интеративного отслеживания считается достигнутой, и поиск продолжают дальше.
Критерий отбора для интеративного отслеживания по предшествующему уровню развития техники определялся функцией  , где A1 - амплитуда целевого сигнала в момент t2; A2 - амплитуда исходного сигнала в момент t1.
, где A1 - амплитуда целевого сигнала в момент t2; A2 - амплитуда исходного сигнала в момент t1.
Величина S ограничена величинами O и I. Чем более похожи две амплитуды, тем ближе функция S к нулю.Чем более несхожи амплитуды, тем ближе функция S к 1. Затем рассчитывается функция суммы:
SCORE = (S • 9,0) + 1
Эта сумма сравнивается с контрольной величиной, выбранной интерпретатором или конечным потребителем данных, и лежащей в диапазоне между 1 и 10. Если сумма превышает контрольную величину, целевой сигнал не выделяется.
Для того, чтобы подготовить или выделить карту горизонта описанным выше способом по предшествующему уровню техники, требуется обработка весьма больших массивов данных. Необходимо не только выполнить процедуры выделения, но и сами эти процедуры требуют оперирования цифровыми данными, содержащими много разрядов информации,представляющей аналоговые сейсмические сигналы. В результате, даже при использовании на автоматизированных рабочих местах очень мощных компьютеров геологии и геофизики пользующиеся автоматизированными рабочими местами, снабженными программой выделения горизонта из трехмерных массивов, должны ждать, пока программа пройдет по всем данным и выполнит описанные выше процедуры. Такое ожидание может серьезно помешать рабочему процессу в тех случаях, когда пользователь желает просмотреть несколько горизонтов за короткое время.
Основной целью настоящего изобретения является создание способа хранения и выделения трехмерных сейсмических данных, позволяющего по команде пользователя получать карту горизонта за значительно более короткое время, в 10 - 50 раз быстрее, чем способы по предшествующему уровню техники, использующие сопоставимую вычислительную мощность.
Другая цель настоящего изобретения заключается в уменьшении не менее чем в 8 раз объема памяти вычислительной машины, необходимой для выделения горизонта.
Другая цель настоящего изобретения состоит в создании альтернативного способа хранения и выделения трехмерных сейсмических данных, отличающегося высокой точностью генерации карт горизонтов и их атрибутов.
Еще одной целью настоящего изобретения является создание такого способа выявления и интерактивной коррекции ошибок трассировки, который был бы намного быстрее и удобнее для пользователя по сравнению с известным.
Указанные выше цели, а также другие преимущества и особенности настоящего изобретения обеспечиваются способом и устройством по настоящему изобретению, согласно которым основная масса расчетов, необходимых для процедур выделения их трехмерного массива сейсмических данных, выполняется заранее, на этапе "пакетной" (не интерактивной) обработки данных. Результаты пакетной обработки данных хранятся в виде " битового массива горизонта", в котором каждая сейсмическая величина исходного трехмерного куба оцифрованных данных заменена одним разрядом эталонной информации. Разрядный (битовый) массив горизонта получают, выбрав и обработав все сетки сейсмических профилей размером три на три и приписав разряд, равный 1, каждой точке на глубине, соответствующей центральному сигналу на сетке, для которой какой-либо показатель горизонта (или "характеристика") может быть выделен согласно методу выделения локального горизонта. такой характеристикой может быть максимальная амплитуда импульса, минимальная амплитуда импульса, либо другие характерные признаки (атрибуты), например переход через ноль, частота и т.д. Далее, каждый локальный горизонт, представленный разрядом "I" на центральном сигнале для конкретной точки на глубине, координируется с соседними сигналами так, чтобы образовалась непрерывная последовательность локального горизонта - от одного локального горизонта на глубине для центрального сигнала к соседнему локальному горизонту для центрального сигнала. В результате получают окончательный битовый массив, который при обращении к нему в интерактивном режиме выдает горизонты, начиная с любого бита (разряда) в массиве, выбранного в качестве исходной точки. Такие горизонты, получаемые в результате сканирования окончательного битового массива, являются эталонными эквивалентами горизонтов, выделенных на основе исходного восьмиразрядного массива сейсмических данных.
Также предлагается способ и устройство хранения атрибутной информации, соответствующей каждой единице или "I" разряда в окончательном битовом массиве.
Во время интерактивной фазы пользователь обращается только к окончательному битовому массиву, а не к данным исходного сейсмического массива. Этот массив данных может храниться в оперативной памяти компьютера, а не на диске, как того требовал предшествующий уровень техники. Сканированием окончательного битового массива из исходной точки получают карту горизонта. Процесс идет настолько быстро, что пользователь может воспроизвести карту горизонта как бы мгновенно. Ведется запись пути через битовый массив, так что в случае обнаружения ошибки в части результирующей карты, пользователь может выявить и удалить эту карту горизонта.
Вышеописанный окончательный битовый массив обычно содержит 10 - 20 % единичных битов, а остальные биты являются нулями. По другому способу и устройству по настоящему изобретению вместо окончательного битового массива создают "сжатый массив сигналов". В том случае вместо записи единицы по месту эталонного ближайшего характерного признака импульса (например, пика, провала, либо какой-либо специфической фазы) хранится запись точного времени (либо его эквивалента - глубины), при котором этот характерный признак имел место. Эти значения времени или положения на глубине последовательно записываются в индексный файл. Этот альтернативный способ для определения точного времени или положения на глубине характерной величины для каждого локального горизонта предпочтительно интерполируют запись сейсмограмм. Характерные величины, определенные интерполяцией, записываются непрерывно, однако их положение на глубине определяется на основе величин, хранящихся в сжатом массиве сигналов. В интерактивном режиме расширение за исходную точку в сжатом массиве сигналов производится также, как и при сканировании окончательного битового массива, однако при этом используется другая процедура поиска.
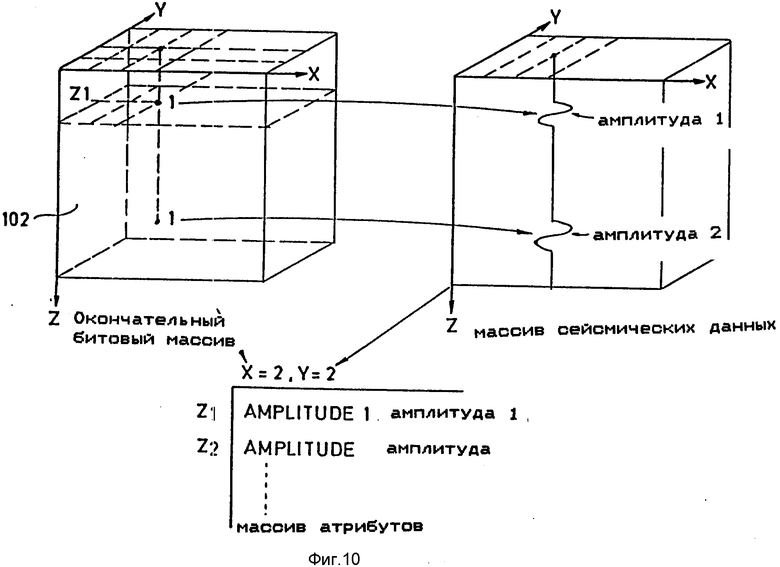
На фиг. 1 - 4 показаны автоматизированные способы выделения, соответствующие предшествующие уровню техники, и показывают трехмерные массивы сейсмических данных; на фиг. 5 - массив сигналов размером три на три, определенный вокруг центрального сигнала, используемого для получения возможных разрядов; на фиг. 6 а, б - один из способов определения того, находится или нет какая-либо характеристика импульса с конкретной глубиной на локальном горизонте (для того чтобы решить, должен ли быть включен бит в возможный битовый массив); на фиг. 7 а, б - процедуры проверки в ходе создания окончательного битового массива (для того чтобы гарантировать, что при последующем сканировании с любого бита в битовом массиве будет получен какой-либо горизонт); на фиг. 8 - процедуры проверки в ходе создания окончательного битового массива, при которых наборы битов для точек глубин центральных линий тестируются по отношению к соседним битам - как по отношению к восточным и западным, так и по отношению к северным и южным; на фиг. 9 - как после пакетной обработки пользователь выбирает исходную точку, причем исходная точка соответствует единичному биту в окончательном битовом массиве, а также иллюстрирует работу сканера по получению карты горизонта при одновременном сохранении исходной информации, пригодной для выявления и исправления ошибок на карте; на фиг. 10 - способ создания массива атрибутов из характерных величин, который соответствует единичным битам в окончательном битовом массиве.
Лучший вариант осуществления изобретения. Способ по настоящему изобретению подразделяется на две фазы. Предложено программное обеспечение для вычислительной машины, предназначенное для работы на аппаратных средствах в процессе реализации данного способа. Первая фаза является пакетной фазой (не интерактивной) обработки данных, на которой трехмерные сейсмические данные сигналов первоначально обрабатываются на небольших пробных участках для того, чтобы выявить "возможные биты", репрезентативные для локальных горизонтов. Такие "возможные биты" затем обрабатывают по процедуре "сканирования" для того, чтобы гарантировать, что соседние локальные горизонты имеют совпадающие общие границы. Конечным результатом такой обработки является окончательный битовый массив, в котором каждый сигнал конвертирован в серию нулей и единиц как функций глубины и который представляет все горизонты. Единичные биты помещаются для глубин каждой плоскости напластования или "горизонта" по весовому массиву сейсмических данных. Горизонт определяется - как горизонтально непрерывная характеристика геологической формации, и обычно представляет собой максимум либо минимум импульса на дорожках сейсмограмм. Сейсмический импульс часто представляет собой отражения от глубинных геологических формаций. Помимо максимумов и минимумов можно использовать и другие атрибуты, или характеристики, однако в дальнейшем настоящая заявка будет ограничена только ими.
Вторая фаза представляет собой интерактивную фазу, в которой окончательный битовый массив загружается в оперативную память автоматизированного рабочего места геологоразведчика. Пользователь сначала выбирает двухмерный сейсмический профиль, который выводится на мотор. Затем пользователь перемещает курсор на желаемые формации (т.е. максимум импульса) и нажимает клавишу. Такое нажатие определяет координаты X, Y, Z одной точки этих формаций. Эти координаты соотносятся с окончательным битовым массивом, хранимым в оперативной памяти, и бит, записанный под этими координатами X, Y, Z, определяется в качестве исходного для картирования горизонта. Эта исходная точка используется автоматическим способом выделения (названным "сканер"; сходную процедуру используют для получения окончательных битов из возможных битов) для распостранения этой исходной точки по всему трехмерному битовому массиву. Горизонт вырабатывается и выводится на дисплей с исключительной точностью и скоростью. Ниже следует детальное описание каждой фазы.
Пакетная фаза.
1. Создание возможного битового массива. Фиг. 5 иллюстрирует преобразование цифровых данных, представляющих амплитуды сейсмических импульсов в виде функции глубины, в соответствующие разряды (биты), т.е. в 0 и 1, являющиеся функцией глубины, в которой единицы присвоены тем значениям глубин, на которых выделена заранее определенная характеристика импульса. Например, трехмерный сейсмический массив (в левой части фиг. 5) изображает массив сигналов размеров три на три, построенный вокруг центрального сигнала, являющимся функцией глубин Z и исходящим из точки с координатами X=1, Y=1. На глубинах Z1 и Z2 показаны два импульса 40, 42. Фактический сигнал может иметь много импульсов. Массив сейсмических сигналов размерностью три на три, примером которого является массив с центром в X=1, Y=1, обрабатывается как группа процессом PICK или программой 110, в результате чего получают центральный битовый сигнал в виде функции от глубины в точке X=1, Y=1. Предполагается, что выделение программой 110 подтвердило, что максимальные амплитуды, представленные на глубине Z1 импульсом 40 и на глубине Z2 импульсом 42, соответствуют отдельным локальным горизонтам сетке сейсмических профилей размером три на три. Возможный битовый массив в правой части фиг. 5 показывает, что центральный сигнал в качестве функции глубины имеет единичные биты, помещенные в Z1 и Z2, а все остальные глубины на этом сигнале представлены нулями. Такая процедура может быть повторена для всех центральных сигналов трехмерного массива сейсмических данных до тех пор, пока весь возможный битовый массив не будет полностью заполнен нулевыми и единичными битами (в качестве альтернативы, для того чтобы выявить окончательные биты по ходу процесса, могут быть найдены и тестированы по отношению к соседним локальным горизонтам возможные биты центрального сигнала). Программа PICK 110 (фиг. 5) применяется к каждой максимальной амплитуде каждого импульса каждой центрального сигнала каждого сейсмического битового массива размером три на три, как это описано ниже.
2. Определение возможных разрядов для каждого центрального сигнала возможного битового массива.
Предпочтительный вариант способа PICK (фиг. 5) представлен на фиг. 6а, б. По этому способу вначале определяют максимальные амплитуды импульса для каждой глубины на центральном сигнале "массива" сигналов размером три на три. Затем выбирают набор пяти тестирующих импульсов к "югу", "западу", "северу" и "востоку" (обозначены А, B, С, D,) от центрального сигнала (фиг. 6а, б). Южный, западный, северный и восточный сигналы играют роль тестовых сигналов вокруг центрального сигнала О, который имеет глубину Z, соответствующую точке глубины максимальной (либо каким-то другим характерами. например минимальной) амплитуды импульса, как это показано на фиг. 6а. Предпочтительный вариант способа PICK 110 выделяют и итеративно верифицируют все четыре боковых сигнала по отношению к центральному сигналу, прежде чем точка максимума О на глубине Z1 соответствующего центрального сигнала начнет использоваться как единичный бит на глубине Z1 соответствующего сигнала возможного битового массива. Если какое-либо сравнение центрального сигнала и соседнего бокового сигнала не удовлетворит установленному пользователем критерию отбора, то максимум импульса на глубине Z1 не считается принадлежащим локальному горизонту, как не прошедший тестирование.
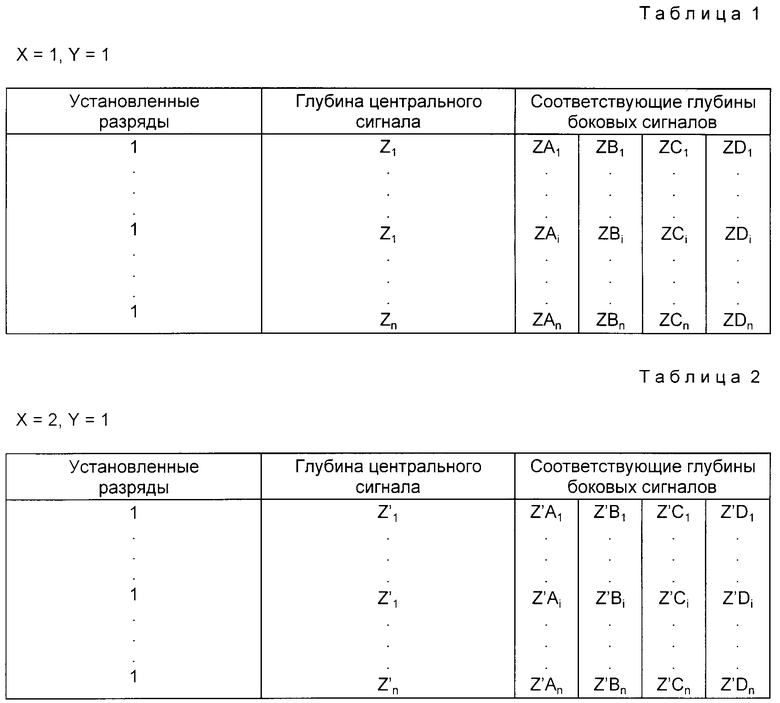
Предпочтительный способ выделения по настоящему изобретению продемонстрирует поэтапный множественный процесс верификации сигналов с использованием набора по пять сигналов, с выделением четырех соседних (боковых) сигналов (фиг. 6б) и верификации каждой из четырех точек А, B, C и D точно также, как и итеративный режим по предшествующему уровню техники, показанный на фиг. 4. Каждая итеративная верификация использует так же самые определяемые показателем критерии, как это описано выше. Единичный бит записывается для точки глубины О в возможном битовом массиве только в том случае, если все четыре боковых сигнала из упомянутого набора пройдут тестирование. Если все четыре боковых сигнала пройдут такие тесты, то любой из боковых сигналов A, B, C и D может быть снова соединен с центральной точкой О. Такое правило "все или ничего" гарантирует, что точка глубины на центральном сигнале и выбранные глубины на его боковых сигналах действительно лежат на одном локальном сесмическом горизонте. В определенных условиях правило "все или ничего" не является оптимальным или необходимым и может оказаться достаточным использованием менее жестокого критерия. Выше описанный процесс повторяется для каждого импульса на центральном сигнале, расположенном в X=I, Y=I. Обычный сигнал имеет много импульсов с максимальной амплитудой. В общем случае имеется N импульсов, расположенных на глубинах Z1, Z2,...Zi...Zn, где i означает i-тый импульс. Для каждого последовательного теста, как это было описано выше, глубина соседнего сигнала записывается и хранится как точка на возможном локальном горизонте. Другими словами, единичный биты записываются и хранятся для "успешных" глубин Zi, и одновременно записывается глубина соседнего сигнала в A, B, C и D. Нули ("нулевые" бита) записываются во все эталонные точки для тех глубин (или интервалов времени), для которых не были записаны единичные биты. Подобная запись в памяти может быть представлена так, что это сделано в табл. 5.
Независимо от этого, окончательным утверждением вышеописанный процесс выделения повторяют для каждого массива сигнала размером три или три вместо того, чтобы выполнять его для каждого сигнала. Например, массив данных размером три на три, центрированный в X=2, Y=2 обрабатывается в соответствии с вышеописанными способом выделения. Единичные биты записывают для глубины Z (назначены Z', (табл. 2). Как и в табл. 1, соответствующие глубины на боковых сигналах A, B, C и D также записываются для хранения.
3. Определение окончательного битового массива. По способу сканирования, используемого в "интерактивной фазе" (описан ниже), глубина любого бита может быть использована в качестве исходной точки для поиска бита на соседнем сигнале (т. е. сигнале, лежащем непосредственно к северу, югу, востоку или западу). Если такой поиск завершается успешно, то говорят, что исходный бит и вновь найденный бит "принадлежат" к одному и тому же горизонту. В предыдущем разделе был описан выбор возможных битов, который касался того, как локальный горизонт, заданный сейсмическими данными, используют для того, чтобы определить, какой разряд следует записать в память.
Процесс, описанный в этом разделе, определяет, сможет ли каждый из бита генерировать локальный горизонт. Если да, то этот бит сохраняется, если нет, бит сбрасывается. Таким путем можно гарантировать, что "окончательный" битовый массив будет верно воспроизводить горизонты, определенные сейсмическими данными.
С учетом указанного требования, и продолжая описанный выше пример (табл. 1 и 2), модно контактировать, что для гарантии нахождения единичных битов, предписанных глубин Z', на горизонте определенном способом выделения для X= 1, Y=1, массив данных 3х3, необходимо тестировать биты на различных глубинах Z' для X=2, Y=2, массив данных 3х3. Другими словами, для того чтобы определить, находится ли бит в Z' I в пределах заданного расстояния от бита в Zi (X= 1, Y=1), и наоборот, выполняют тестирование. Такое тестирование проводят в соответствии с табл. 3.
Таблица 3. Тестирование выбора Z' (например, для массива данных с X=2, Y=1, 3х3 по отношению к массиву данных с X=1, Y=1, 3х3)
1. поочередно оценивают каждый бит центрального сигнала в  .
.
2. Для каждого бита центрального сигнала  находят бит ближайшего центрального сигнала Z*, относящийся от
находят бит ближайшего центрального сигнала Z*, относящийся от  в записанной в памяти направлении Z для центрального сигнала X=1, Y=1 не более чем на "а" единиц (см. фиг. 7а). Если такой бит не найден, продолжить поиск для следующего значения
в записанной в памяти направлении Z для центрального сигнала X=1, Y=1 не более чем на "а" единиц (см. фиг. 7а). Если такой бит не найден, продолжить поиск для следующего значения  .
.
3. Затем определяют, равен ли такой бит центрального сигнала (X=1, Y=1) Z* боковому биту Z', для X=2, Y=1 (см. табл. 2). Если да, то локальный горизонт в Zi для массива X=1, Y=1, 3х3 соответствует локальному горизонту в  для X=2, Y=1. Если нет, то бит, проставленный в
для X=2, Y=1. Если нет, то бит, проставленный в  , исключается (т.е. устанавливается равными нулю "О").
, исключается (т.е. устанавливается равными нулю "О").
Далее тестируется все биты на различных глубинах для массива X=1, Y=1, 3х3 для того, чтобы гарантировать, что между битами, установленными в Z для X= 1, Y=1 и в Z' для X=2, Y=2, существует один и только один общий горизонт. Способ такого тестирования иллюстрируется табл. 4.
Таблица 4 (Тестирование соседних локальных горизонтов).
1. Для каждого сигнала X=1, Y=1 устанавливают i=0 и увеличивают с каждым шагом на 1 до тех пор, пока все биты не будут проверены.
2. Для бита Zi в пределах расстояния a находят ближайший бит Z'* на центральном битовом сигнале для X=2, Y=1, т.е. определяют существует ли бит в интервале Z'=8 +a (фиг. 7б). Если такого бита Z'* не существует, то устанавливают i=i+1 и переходят к шагу 5 (см. ниже).
+a (фиг. 7б). Если такого бита Z'* не существует, то устанавливают i=i+1 и переходят к шагу 5 (см. ниже).
3. Определяют, равен ли Z'* биту ZDi (см. табл. 1). Если да, то устанавливают i=i+1 и переходят к шагу 6 (см. ниже).
4. Если Z'* не равен ZDi, то устанавливают разряд в Z'*, равным "0" (обнуливают бит Z'*) и устанавливают i=h, где h представляет собой наименьший индекс любого бита, большего или равного глубине Z'*-a.
5. Если такого i не существует, выходят из этой процедуры.
6. Если i меньше, чем число битов, хранимых в памяти для X=1, Y=1,переходят к шагу 1 (см. выше).
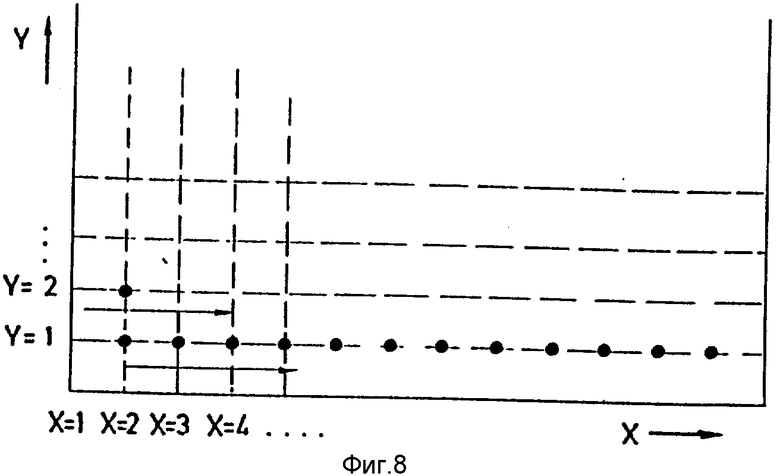
Указанный процесс продолжается для всего первого "профиля" массивов с центральным сигналом 3х3, начиная слева направо. То есть, для профиля Y=1 по способу, изложенному в табл. 1,2,3 и 4, обрабатывают затем биты, установленные для Z в Y=1, X=2, затем биты, установленные для Z в Y=1, X=3, и т.д. - и так до тех пор, пока не будет обработан весь профиль.
Как показано на фиг. 8, после этого обрабатывается профиль Y=2, и т.д. Для массива 3х3 в Y=2, X=1 биты Z обрабатывают в соответствие со способом, изложенным в табл. 1-4 путем тестирования их по отношению к битам Z, хранимым в памяти для Y=1, X=1. Другими словами, для X=1, Y=2 создается новая табл. 2. Эту новую табл. 2 и табл. 1 тестируют по способу табл. 3, причем в ходе поверки ищется бит Z', записанный в новой табл. 2 для X=1, Y=2, после чего ведется поиск к "югу" - в табл. X=1, Y=1 определяется, равен ли бит Z* биту Z'Ci. Затем новую табл. 2 и табл. 1 тестируют по способу табл. 4, причем биты в X= 1, Y=1 (табл. 1) тестируют по отношению к битам в X=1, Y=2 (новая табл. 2), после чего ведется поиск к "северу" и определяется, равен ли бит Z'* биту Z'Ai в табл. 1.
После этого массив 3х3 с центром в Y=2, X=2 тестируют к "югу" по отношению к битам в массиве с центром в Y=1, X=2 и к "востоку" по отношению к битам в массиве с центром в Y=2, X=1. Этот процесс продолжают до тех пор, пока не будут обработаны все профили массива 3х3.
Обработка по такой процедуре гарантирует, что биты на сигналах, оставшиеся в окончательном битовом массиве, лежат на локальных горизонтах, которые находятся на заранее заданном расстоянии от локальных горизонтов соседних сигналов. при сканировании (см. ниже) гарантируется, что горизонты, выделяемые из такого окончательного битового массива, будут теми же горизонтами, которые были бы выделены при работе с исходными сейсмическими данными. Следует подчеркнуть, что для любой характеристики, которую желательно иметь на карте горизонта, необходимо создавать отдельный окончательный битовый массив. Необходимо создавать отдельные битовые массивы для пиков (максимумов импульса) и провалов (минимумов импульса).
Альтернативный способ и устройство: создание сжатого массива сигналов. Окончательный битовый массив, описанный выше, содержит гораздо больше нулей, записанных в точках сигнала, чем единиц. Обычно в окончательном битовом массиве содержится от 80 до 90% нулей. В соответствие с настоящим предложен альтернативный массив, для чего следует в окончательном битовом массиве заменить все единичные биты на индексный файл, который содержит интерполированное точное время или положение на глубине сейсмического сигнала. При таком способе хранения данных все нули игнорируются. Так, для сигнала X=1, Y=1 все единичные биты в окончательном битовом массиве заменяет последовательность (или "стек") цифр. Каждое число представляет глубину единичного бита в окончательном битовом массиве.
Предпочтительно, что информация о глубине каждого бита хранилась в виде целого числа без знака длиной в полуслово. Это подразумевает, что максимальная возможная глубина (т.е. величина полного времени пробега), которая может быть сохранена в сжатом массиве сигналов, составляет 65535. Поскольку типичная длина сигнала составляет порядка 5-6 с, точность записи времени составляет 0,1 миллисекунды. Если данные о времени (глубине) хранят в предпочтительной форме, т. е. в виде полуслова без знака, то значения времени (глубины), выраженные числом с плавающей запятой, сначала масштабируют, затем округляют и хранят в виде целых чисел.
Массив информации по горизонту, в данном случае окончательный битовый массив, преобразованный в сжатый массив сигналов, содержит примерно на 50% больше битов информации, чем окончательный битовый массив (поскольку в нем хранится информация о глубинах), однако он все еще примерно в 5 раз меньше, чем исходный трехмерный массив сейсмических данных. По сравнению с окончательным битовым массивом сжатый массив сигналов имеет то преимущество, что он за счет интерполяции может более точно представлять точное положение на глубине и характеристики импульсов.
Альтернативный способ и устройство: интерполяция импульса на интервале, включающем единичный бит в окончательном битовом массиве, для определения атрибутов горизонта и его точного положения на глубине.
Как было видно из вышеизложенного, для того чтобы выразить существование горизонта в трехмерном массиве сейсмических данных, в окончательном битовом массиве был выбран каждый единичный бит. Однако ограничение для таких битов является то, что они лежат на эталонных интервалах глубин, полученных в результате оцифровки сигналов. Действительные максимальные значения импульса могут лежать,однако, выше или ниже конкретного положения на глубине единичного бита. этот факт подразумевает, что может быть предложен способ и устройство для определения точного положения на глубине максимальных и минимальных значений атрибута импульса, которые находяся поблизости от глубины единичного бита в окончательном битовом массиве. Предпочтительным способом интерполяции является подбор параболы, проходящей через три точки, определенные единичным битом и импульсами выше и ниже глубины этого единичного бита. Положение на глубине центра или максимума (или возможного минимума) такой параболы определяет точную глубину максимума или минимума, а их высота дает истинное значение атрибута импульса.
Предпочтительно, чтобы в сжатом массиве сигналов вместо соответствующего единичного бита в окончательном битовом массиве хранились интерполированное значение глубины. Полученное интерполированное значение глубины в сжатом массиве сигналов более точно определяет положение горизонта, чем соответствующее положение единичного бита в окончательном битовом массиве.
Интерактивная фаза. Фиг.9 иллюстрирует интерактивную фазу по настоящему изобретению, которая наступает после завершения фазы пакетной обработки. Конечно, в оперативную память загружен окончательный битовый массив (либо, в зависимости от его размера и массива оперативной памяти компьютера, часть его) и на дисплее автоматизированного рабочего места 200 может быть выведен двухмерный сейсмический разрез. Пользователь выбирает исходную точку, например, поместив курсор мыши в точку Р и щелкнув ( быстро нажав и отпустив) клавишей. Щелчок клавиши генерирует координаты X, Y, Z (глубина), которые соответствуют конкретному единичному биту в окончательном битовом массиве 102, хранимом в оперативной памяти компьютора 100. После этого для выделения остальных единичных битов в окончательном битовом массиве, которые определяют горизонт, используют автоматический способ трехмерного выделения "SCANNER" ("сканер") 105. Такие биты соответствуют обычному атрибуту, например максимальной амплитуде импульса.
Описание способа "SCANNER". "SCANNER" предпочтительно реализуют в виде компьютерной программы, хранимой, в оперативной памяти компьютера 100, который обрабатывает окончательный битовый массив 102 для того, чтобы получить карту горизонта 110. Нижеследующая таблица описывает работу "сканера". "SCANNER" позиционирует первоначальную исходную точку и другие выбранные точки X, Y, Z, которые становятся исходными точками, обрабатывая информацию посредством процедуры "QUEUE" ("очередь") последовательно тестирует каждую исходную точку. В ходе сканирования координатам X - Y присваиваются значения Z (или значения глубин), которые находятся на одной и той же плоскости напластования или "горизонте", что и исходная точка.
Таблица 5 ("SCANNER").
Шаг 1. Инициализация. Исходная точка помещается в пустую очередь. Для каждой координаты X, Y карта горизонта переводится в состояние "пустая". Это означает, что координате Z для каждой точки X, Y на карте присваивается значение, равное нулю.
Шаг 2. Первая исходная точка X, Y, Z удаляется из очереди. В результате, очередь становится короче на один элемент. Если в очереди больше нет элементов, то сканирование прекращается.
Шаг 3. Точка X, Y, Z из очереди используется для поиска в направлении Z единичного бита в окончательном битовом массиве. Для интервала в две единицы глубины (этот интервал должен быть таким же, как интервал, используемый при пакетной обработке) поиск ведется в следующем порядке: одна единица глубины вниз, две единицы глубины вверх, три единицы глубины вниз и четыре единицы глубины вверх. Если единичный бит найден, например бит X, Y, Z1, то для координат X, Y, на карте 110 делается запись Z1, и программа приходит к шагу 4 (см. ниже). Если в этом интервале единичный бит не найден, то программа переходит к шагу 2 (см. выше).
Шаг 4. Исходя из точки X, Y, обрабатывается каждое из четырех направлений на "карте". Этими направлениями являются направления на "север" (X, Y+1), "восток" (X+1, Y) и "запад" (X-1, Y). Для каждого из этих направлений на карте производится проверки того, что им были уже присвоины координаты Z. Если да, то ничего не происходит, и начинается проверка следующей точки "направления". Если новая точка находится в "пустом состоянии", то в конец очереди (программы QUEUE) помещается трехмерные координаты, содержащие положение пустой координаты на карте, и величина Z1, найденная на шаге 3. Например, если (X, Y, Z) - координаты единичного бита, обнаруженного на шаге 3, и точка (X, Y-1) на карте пустота, то в конец очереди заносится точка (X-1, Y-1, Z1). Точно так же поступают с точками (X, Y+1), (X-1, Y) и )X+1, Y). После завершения шага 4 программа переходит к шагу 2.
Процесс сканирования прекращается, когда он не может уже распространяться дальше и добавлять новые положения координаты Z по месту записи единичного бита в окончательном битовом массиве. При остановке процесса сканирования в карте горизонта добавляются точки глубин, через которые существует маршрут от первоначальной исходной точки к любой точке, определенной по ней. Другими словами, можно проследить маршрут от исходной точки к любой другой точке, добавленной к карте горизонта, так, что соседние точки на маршруте отличаются по величине не более чем на величину интервала (глубина "а" на фиг. 7).
Альтернативный способ и устройство: интерактивное сканирование интерполированного сжатого массива сигналов.
Описанный выше процесс сканирования для интерактивной фазы поиска в окончательном битовом массиве с наибольшими модификациями использован для поиска в интерполированном сжатом массиве. Для сжатого массива используют исходную точку или глубину. Показатель этой глубины используют для определения на соседних сжатых сигналах одноименного показателя и интервала этого показателя. Величины глубин, соответствующие этим показателям на соседних сигналах, обрабатывают для нахождения интерполированных глубин, лежащих в заранее определенном интервале глубин по отношению к исходной точке. Пользователь системы может изменять величину этого интервала. Все найденные глубины на соседних сжатых сигналах обозначаются или идентифицируются как принадлежащие тому же горизонту, что и исходная глубина. Если поиск в первоначально определенном интервале оказывается безуспешным, интервал показателя удваивают, и так поступают до тех пор, пока поиск либо завершится успешно, либо на смежных сжатых сигналах уже не могут быть найдены новые глубины. Это процедура повторяется для показателя и глубины смежного сигнала, используемых в качестве исходной точки.
Запись порождающей информации. По мере того, как сканирование распространяется от исходной точки вовне по всем направлениям - на север, юг, восток и запад - одновременно ведется запись как каждой выбранной смежной точки, так и точки, ее породившей. Например, исходная точка X, Y может привести к выбору точек X+1, Y; X, Y+1; X-1, Y-1 и X, Y-1. Точка X, Y являются порождающей всех этих четырех точек. Точно так же точка X+1, Y может принести к выбору точек X+2, Y; X+1, Y+1, Y-1. Точка X+1, Y является порождающей точки X+2, Y; X+1, Y+1; и X+1, Y-1. Точка X, Y являются порождающей всех упомянутых выше точек. В ходе генерации карты горизонта подобная порождающая информация хранится в памяти 107 (см. фиг. 9).
Редактирование на основе порождающей информации. В ходе трассировки в пакетном режиме (фиг. 5, 6а,б, 7А,б и 8; табл. 1 - 4) некоторые разломы в земной коре могут оказаться нераспознанными, и трассировка может "перескочить" через разлом от одного слоя осадочных пород или горизонта к другому. При последующем сканировании окончательного битового массива процедура сканирования также не распознает разлом и продолжит трассировку на новом горизонте, т.е. по слою осадочных пород, отличному от слоя, которому принадлежит исходная точка.
Желательно, чтобы все выделенные точки, не находящиеся на горизонте, к которому принадлежит исходная точка, удалялись, и удаленная часть подверглась повторному сканированию.
Неверные участки горизонта могут быть обнаружены интерпритатором визуально при изучении карты горизонта (фиг. 9). Подсказкой о том, что определенные участки карты выделены неверно, для интерпритатора могут быть внезапны скачки глубины на карте.
Используя порождающую информацию, хранимую в модуле 107, использователь может вывести на экран маршрут или маршруты от любой порожденной точки к исходной точке. Визуальное инспектирование маршрута или маршрутов на карте горизонта 110 либо в блоке сейсмических данных может привести к обнаружению той точки, где сканер перескочил через разлом. Удаление всех точек, порожденных точкой, в которой сканер перескакивая разломы, удаляет соответствующие данные с карты. Удаленный участок может быть подвергнут повторному сканированию с выбором новой исходной точки для этого участка.
Создание массива атрибутов. Часто геологоразведчик (например геофизик) желает проанализировать максимальные (или минимальные) величины сейсмических импульсов, соответствующих карте горизонта. Такая информация может помочь пользователю при интерпритации сейсмических данных. Подобные "атрибуты" либо другие атрибуты могут храниться в массиве, соответствующем окончательному битовому массиву. Целесообразно хранить только такие атрибуты, которые соответствуют "включенным" или единичным битам в окончательном битовом массиве. Поскольку из-за использования эталона истинный максимум (или, возможно, точка перехода через ноль) импульса не может быть идентифицирован, такие истинные атрибуты, соответствующие включенным или единичным битам в окончательном битовом массиве, могут быть получены интерполяцией в пакетном режиме.
На фиг. 10 показан процесс, в ходе которого амплитуда для каждого измерения "Z" для каждого сигнала X, Y сохраняется в памяти компьютера. Каждый включенный или единичный бит в окончательном битовом массиве имеет координаты X, Y, Z, соответствующие амплитуде импульса в массиве сейсмических данных. Эта амплитуда непрерывно записывается в массив атрибутов в виде функции от измерения Z единичных битов.
Поскольку только около десяти процентов всех точек на глубине в окончательном битовом массиве имеют включенный или единичный бит, объем массива атрибутов тоже составляет около десяти процентов от исходного массива сейсмических данных. Это обстоятельство позволяет считывать в память больше амплитуд горизонта, что ведет к более быстрой выдаче информации на дисплей компьютера, поскольку она получается в результате расчетов, базирующихся на амплитудах горизонта.
Альтернативный способ и устройство: подключение массива атрибутов к сжатому массиву сигналов.
Интерполированные атрибуты (т.е. максимальная или минимальная числовая величина импульса), определенные посредством способа и устройства, описанных выше, непрерывно записываются в память, как это показано на фиг. 10 для окончательного битового массива по настоящему изобретению. Каждый атрибут индексируется так же, как и положение на глубине. В данном альтернативном способе хранения интерполированных атрибутов их положение на глубине определяется по соответствующим положениям на глубине хранимых в сжатом массиве сигналов. Предпочтительно, чтобы массив интерполированных атрибутов хранился совместно с интерполированным сжатым массивом сигналов в оперативной памяти компьютера 100 (фиг. 9). Такое совместное хранение массива интерполизованных атрибутов с интерполированным сжатым массивом сигналов ускоряет выделение атрибутов на дисплей.
Для специалистов в данной области из вышеприведенного описания будут очевидными различные модификации и изменения в описанных способах и устройствах, которые не выходят за пределы настоящего изобретения. По этой причине подразумевается, что эти изменения входят в прилагаемую формулу изобретения. Только прилагаемая формула изобретения накладывает какие-либо ограничения на настоящее изобретение.




Использование: для быстрого составления карт горизонтов из трехмерного массива сейсмических сигналов, согласно которым в ходе пакетной обработки цифровых данных, представляющих сигналы импульсов для каждого сейсмического сигнала указанного массива, определяются "единицы" и "нули". Сущность изобретения: создается битовый массив, в котором "единица" на глубине сигнала означает, что на этой глубине, а также на других глубинах с "единицей" в пределах заранее выбранной глубины на смежных сигналах, существует горизонт. Геологоразведчик в режиме реального масштаба времени выбирает исходную точку, идентифицируя тем самым "единицу" на конкретном сигнале на конкретной глубине. Автоматизированная процедура сканирования находит все другие "единицы" на глубинах смежных сигналов. Каждая найденная "единица" на смежном сигнале рассматривается в качестве исходной точки, и процесс продолжается до тех пор, пока уже не будут обнаруживаться новые "единицы". На основе глубин каждой найденной "единицы" создается карта горизонта. Предлагается также способ, согласно которому битовый массив заменяется сжатым массивом сигналов, в котором каждый бит битового массива заменен числовой величиной, соответствующей точному положению на глубине экстремума атрибута, представленного этим битом. 5 табл., 10 ил.
| US, патент, 4727488, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| US, патент, 4633448, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |

