Изобретение относится к измерительной технике и может быть использовано для дистанционного измерения состава газопылевых выбросов различных объектов, в частности для определения концентрации веществ, составляющих собственную внешнюю атмосферу различных летательных аппаратов (ЛА), находящихся как в земной атмосфере, так и за ее пределами, а также для зондирования малоразмерного космического мусора космогеннного и техногенного происхождения.
Известны многочисленные варианты газоанализаторов, например, описанные в [1, 2], в которых газопылевая смесь (ГПС) прокачивается через измерительную головку, при этом концентрации примесей определяются по изменению окраски цветных индикаторов.
Такие газоанализаторы имеют низкую точность, кроме того, они не обеспечивают возможность дистанционного измерения, т. е. измерительный прибор должен непосредственно контактировать с исследуемой средой.
Известны также различные варианты интерферометров, позволяющие определять концентрации атмосферных примесей путем измерения показателя преломления воздуха, например, описанные в [3] отечественные шахтные интерферометры ШИ-5, ШИ-7.
Их недостаток заключается в отсутствии возможности дистанционного измерения примесей, т. е. измерительный прибор должен находится непосредственно в зоне загрязнения. Кроме того, такие приборы обладают сравнительно низкой достоверностью, т. к. различные ГПС могут вызывать одинаковые изменения показателя преломления воздуха.
Известны также лидары, смонтированные на шасси автомобилей, например, описанные в [4]. В них используется дифференциальное поглощение оптического излучения примесями.
Их недостаток заключается в малой дальности, что определяется сравнительно малыми энергетическими возможностями и небольшими апертурами приемопередающих оптических систем, не позволяющими сформировать узкие диаграммы направленности.
Наиболее близким по технической сущности к заявляемому техническому решению является устройство, описанное в [5] и содержащее зондирующий лазер, фотоприемный блок, оптический переключатель, оптический фильтр, оптическую систему наземною комплекса, гидирующую систему, блок управления, блок обработки, блок регистрации и расположенный на ЛА отражатель, при этом выход гидирующей системы соединен с входом привода оптической системы наземного комплекса, зондирующий лазер, оптический переключатель, оптический фильтр и оптическая система наземного комплекса расположены последовательно и оптически связаны, фотоприемный блок оптически связан с оптической системой наземного комплекса через оптический переключатель, выход фотоприемного блока соединен с информационным входом блока обработки, выход блока обработки соединен с входом блока регистрации, первый выход блока управления соединен с управляющим входом зондирующего лазера и с управляющим входом оптического переключателя, второй выход блока управления соединен с управляющим входом блока обработки, а третий выход блока управления соединен с управляющим входом гидирующей системы. Гидирующая система содержит гидирующую оптическую систему, гидирующий оптический фильтр, позиционно-чувствительный фотоприемник, блок формирования гидирующих сигналов, монитор, светоделитель и гидирующий лазер, при этом гидирующая оптическая система, гидирующий оптический фильтр и позиционно-чувствительный фотоприемник расположены последовательно и оптически связаны, выход позиционно-чувствительного фотоприемника соединен с первым входом блока формирования гидирующих сигналов, второй вход блока формирования гидирующих сигналов выполняет роль управляющего входа гидирующей системы, первый выход блока формирования гидирующих сигналов выполняет роль выхода гидирующей системы, а второй выход блока формирования гидирующих сигналов соединен с входом монитора. Оптическая связь гидирующего лазера с оптической системой наземного комплекса осуществляется светодепитепем, расположенным на пути луча зондирующего лазера между оптическим фильтром и оптической системой наземного комплекса. Излучение гидирующего лазера направляется оптической системой наземного комплекса на ЛА, отражается отражателем, поступает в гидирующую оптическую систему и проходит через гидирующий оптический фильтр, пропускающий только излучение гидирующего лазера, после чего попадает на позиционно-чувствительный фотоприемник. Сигналы с выхода позиционно-чувствительного фотоприемника поступают на вход блока формирования гидирующих сигналов. Сигналы с первого выхода блока формирования гидирующих сигналов поступают на вход привода оптической системы наземного комплекса, в результате чего осуществляется слежение за ЛА. Сигналы с второго выхода блока формирования гидирующих сигналов поступают на вход монитора, позволяющего оператору осуществлять визуальный контроль за процессом слежения. Убрав гидирующий оптический фильтр, оператор по экрану монитора может осуществлять поиск ЛА, наведение на него и слежение за ним (после обнаружения ЛА гидирующий оптический фильтр устанавливается на свое место). Оптическая система наземного комплекса выполнена по схеме Кудэ, т. е. оптическое излучение как в нее, так и из нее поступают через трубчатые поворотные оси. Такая схема позволяет направлять оптическое излучение в любую точку небесной полусферы и принимать оттуда оптическое излучение при неподвижных зондирующем лазере и фотоприемном блоке. В качестве отражателя в известном техническом решении используется уголковый отражатель. Оптический фильтр предназначен для предотвращения попадания отраженного от отражателя излучения на вход фотоприемного блока.
По команде оператора блок управления формирует сигнал, поступающий на управляющий вход оптического переключателя, в результате чего оптический переключатель подключает зондирующий лазер к оптической системе наземного комплекса, этот же сигнал поступает на управляющий вход зондирующего лазера, в результате чего зондирующий лазер формирует импульс когерентного оптического излучения который поступает в оптическую систему наземного комплекса. Оптическая система наземного комплекса направляет оптическое излучение на ЛА. После окончания импульса оптический переключатель по команде блока управления подключает оптическую систему наземного комплекса к входу фотоприемного блока. Когерентное оптическое излучение проходит через атмосферу, отражается от отражателя, размещенного на ЛА, вторично проходит через атмосферу и поступает в оптическую систему наземного комплекса, после чего попадает на вход фотоприемного блока. Параметры сигнала на входе фотоприемного блока содержат информацию о параметрах атмосферы. Электрический сигнал с выхода фотоприемного блока поступает на информационный вход блока обработки, где происходит обработка сигналов, в результате чего определяются параметры атмосферы по трассе луча. Сигналы, описывающие параметры атмосферы, с выхода блока обработки поступают на вход блока регистрации.
Недостаток известного технического решения заключается в узости области применения: оно позволяет только определить параметры атмосферы по трассе, соединяющей наземный комплекс и ЛА. Измерить параметры собственной внешней атмосферы (СВА) различных удаленных объектов в том виде, как оно описано в [5], известное устройство не может.
Задача, на решение которой направлено изобретение, заключается в расширении функциональных возможностей путем обеспечения возможности определения параметров СВА удаленных объектов.
Решение поставленной задачи обеспечивается тем, что в известную систему мониторинга окружающего пространства, содержащую зондирующий лазер, фотоприемный блок, оптический переключатель, оптический фильтр, оптическую систему наземного комплекса, гидирующую систему, блок управления, блок обработки, блок регистрации и установленный на ЛА отражатель, при этом выход гидирующей системы соединен с входом привода оптической системы наземного комплекса, зондирующий лазер, оптический переключатель, оптический фильтр и оптическая система наземного комплекса расположены последовательно и оптически связаны, фотоприемный блок оптически связан с оптической системой наземного комплекса через оптический переключатель, выход фотоприемного блока соединен с информационным входом блока обработки, выход блока обработки соединен с входом блока регистрации, первый выход блока управления соединен с управляющим входом зондирующего лазера и с управляющим входом оптического переключателя, второй выход блока управления соединен с управляющим входом блока обработки, а третий выход блока управления соединен с управляющим входом гидирующей системы, внесены следующие усовершенствования (п. 1 формулы изобретения); она дополнительно содержит приемопередатчик радиодиапазона, установленный на ЛА приемопередатчик радиодиапазона, установленную на ЛА приемную оптическую систему, установленный на ЛА фотоприемный блок, установленный на ЛА блок управления и установленный на ЛА второй отражатель, причем четвертый выход блока управления соединен с входом приемопередатчика радиодиапазона, выход приемопередатчика радиодиапазона соединен с сигнальным входом блока обработки, установленная на ЛА приемная оптическая система и установленный на ЛА фотоприемный блок расположены последовательно и оптически связаны, выход установленного на ЛА приемопередатчика радиодиапазона соединен с первым входом установленного на ЛА блока управления, выход установленного на ЛА фотоприемного блока соединен с вторым входом установленного на ЛА блока управления, первый выход установленного на ЛА блока управления соединен с входом привода установленной на ЛА приемной оптической системы, второй выход установленного на ЛА блока управления соединен с входом установленного на ЛА приемопередатчика радиодиапазона, а третий выход установленного на ЛА блока управления соединен с входом привода установленного на ЛА второго отражателя.
Такое построение системы мониторинга окружающего пространства позволяег расширить функциональные возможности за счет обеспечения возможности определения параметров СВА удаленных объектов путем переотражения приходящего к подвижному объекту излучаемого наземным комплексом когерентного оптического излучения и последующего его приема и обработки с учетом параметров земной атмосферы.
В частном случае (п. 2 формулы изобретения) зондирующий лазер выполнен перестраиваемым по частоте. Такое построение системы мониторинга окружающего пространства позволяет измерить зависимость пропускания от длины волны как земной атмосферы, так и СВА удаленных объектов путем использования дифференциального поглощения.
В частном случае (п. 3 формулы изобретения) фотоприемный блок содержит первый частотный разделитель, первый фотоприемник, первый запоминающий блок и первый считывающий блок, установленный на ЛА фотоприемный блок содержит второй частотный разделитель, второй фотоприемник, второй запоминающий блок и второй считывающий блок, при этом первый частотный разделитель и первый фотоприемник расположены последовательно и оптически связаны, выход первого фотоприемника соединен с входом первого запоминающего блока, выход первого запоминающего блока соединен с входом первого считывающего блока, выход первого считывающего блока соединен с информационным входом блока обработки, управляющий вход первого запоминающего блока и управляющий вход первого считывающего блока соединены с запускающим выходом блока управления, второй частотный разделитель и второй фотоприемник расположены последовательно и оптически связаны, выход второго фотоприемника соединен c входом второго запоминающего блока, выход второго запоминающего блока соединен c входом второго считывающего блока, выход второго считывающего блока соединен c вторым входом установленного на ЛА блока управления, а управляющий вход второго запоминающего блока и управляющий вход второго считывающего блока соединены с запускающим выходом установленного на летательном аппарате блока управления. Такое построение системы мониторинга окружающего пространства позволяет измерить зависимость пропускания от длины волны как земной атмосферы, так и СВА удаленных объектов путем использования спонтанного комбинационного рассеяния.
В частном случае (п.4 формулы изобретения) на выходе зондирующего лазера расположен второй светоделитель, а на пути отраженного от второго светоделителя луча зондирующего лазера расположен калибровочный фотоприемник, выход которого соединен с калибровочным входом блока обработки. Такое построение системы мониторинга окружающего пространства позволяет повысить точность измерений путем определения точного значения мощности генерируемого задающим лазером оптического излучения.
В частном случае (п. 5 формулы изобретения) на выходе зондирующего лазера установлен частотный преобразователь, а его управляющий вход соединен с пятым выходом блока управления. Такое построение системы мониторинга окружающего пространства позволяет повысить достоверность проводимых измерений за счет одновременного получения двух спектров спонтанного комбинационного рассеяния как земной атмосферы, так СВА удаленного объекта при двух длинах волн зондирующего импульса.
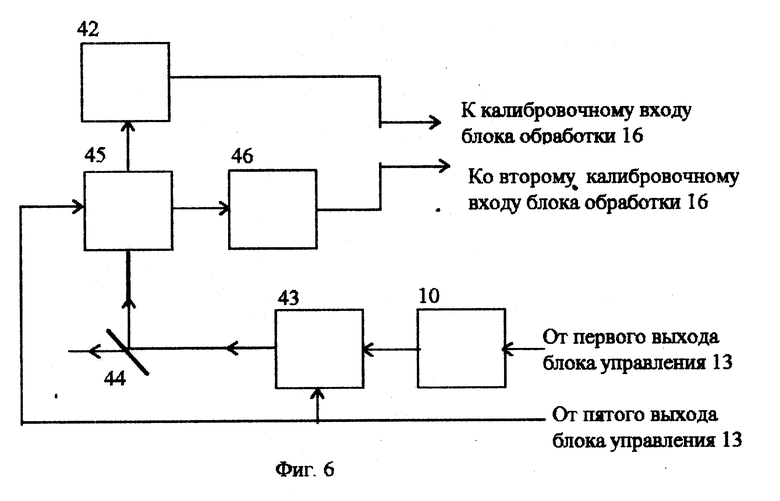
В частом случае (п. 6 формулы изобретения) на выходе частотного преобразователя расположен третий светоделитель, на пути отраженного от третьего светоделителя зондирующего луча расположен калибровочный частотный разделитель, на пути первого выходящего из частотного разделителя луча расположен калибровочный фотоприемник, на пути второго выходящего из калибровочного частотного разделителя луча расположен второй калибровочный фотоприемник, выход калибровочного фотоприемника соединен с калибровочным входом блока обработки, выход второго калибровочного фотоприемника соединен с вторым калибровочным входом блока обработки, а управляющий вход калибровочного частотного разделителя соединен с пятым выходом блока управления. Такое построение системы мониторинга окружающего пространства позволяет повысить точность измерений путем определения точных значений мощности оптического излучения на обоих длинах волн.
На фиг. 1 приведена функциональная схема варианта системы мониторинга окружающего пространства, соответствующая п. 1 формулы изобретения; на фиг. 2-6 варианты конструктивного исполнения элементов и блоков системы мониторинга окружающего пространства.
Система мониторинга окружающего пространства (фиг. 1) содержит оптическую систему 1 наземного комплекса, зеркала 2-6, привод 7 оптической системы наземного комплекса, оптический фильтр 8, оптический переключатель 9, зондирующий лазер 10, приемопередатчик радиодиапазона 11, антенну 12 приемопередатчика радиодиапазона 11, блок управления 13, фотоприемный блок 14, блок регистрации 15, блок обработки 16, гидирующую оптическую систему 17, гидирующий оптический фильтр 18, позиционно-чувствительный фотоприемник 19, блок формирования гидирующих сигналов 20, монитор 21, гидирующий лазер 22, светодедитель 23, ЛА 24, установленную на ЛА 24 приемную оптическую систему 25, установленный на ЛА 24 фотоприемный блок 26, установленный на ЛА 24 блок управления 27, установленный на ЛА 24 приемопередатчик радиодиапазона 28, установленную на ЛА 24 антенну 29 приемопередатчика радиодиапазона 28, отражатель 30 и установленный на ЛА 24 второй отражатель 31. На фиг. 1 исследуемый объект обозначен индексом 32. Зеркала 2-6 позволяют через трубчатые поворотные оси направить оптическое излучение оптической системой 1 наземного комплекса в любую точку небесной полусферы и принимать оттуда оптическое излучение при неподвижных зондирующем лазере 10 и фотоприемном блоке 14. Оптический фильтр 8 защищает зондирующий лазер 10 и фотоприемный блок 14 от воздействия оптических помех. В качестве оптического фильтра 8 может быть использован оптический вентиль. Выход гидирующей системы соединен с входом привода 7 оптической системы 1 наземного комплекса, зондирующий лазер 10, оптический переключатель 9, оптический фильтр 8 и оптическая система 1 наземного комплекса расположены последовательно и оптически связаны, фотоприемный блок 14 оптически связан с оптической системой 1 наземного комплекса через оптический переключатель 9, выход фотоприемного блока 14 соединен с информационным входом блока обработки 16, выход блока обработки 16 соединен с входом блока регистрации 15, первый выход блока управления 13 соединен с управляющим входом зондирующего лазера 10 и с управляющим входом оптического переключателя 9, второй выход блока управления 13 соединен с управляющим входом блока обработки 16, третий выход блока управления 13 соединен с управляющим входом гидирующей системы, четвертый выход блока управления 13 соединен с входом приемопередатчика радиодиапазона 11, выход приемопередатчика радиодиапазона 11 соединен с сигнальным входом блока обработки 16, установленная на ЛА 24 приемная оптическая система 25 и установленный на ЛА 24 фотоприемный блок 26 расположены последовательно и оптически связаны, выход установленного на ЛА 24 приемопередатчика радиодиапазона 28 соединен с первым входом установленного на ЛА 24 блока управления 27, выход установленного на ЛА 24 фотоприемного блока 26 соединен с вторым входом установленного на ЛА 24 блока управления 27, первый выход установленного на ЛА 24 блока управления 27 соединен с входом привода установленной на ЛА 24 приемной оптической системы 25, второй выход установленного на ЛА 24 блока управления 27 соединен с входом установленного на ЛА 24 приемопередатчика радиодиапазона 28, а третий выход установленного на ЛА 24 блока управления 27 соединен с входом привода второго отражателя 31.
Гидирующая система содержит гидирующую оптическую систему 17, гидирующий оптический фильтр 18, позиционно-чувствительный фотоприемник 19, блок формирования лидирующих сигналов 20, монитор 21, светоделитель 23 и гидирующий лазер 22. Гидирующая оптическая система 17, гидирующий оптический фильтр 18 и позиционно-чувствительный фотоприемник 19 расположены последовательно и оптически связаны, выход позиционно-чувствительного фотоприемника 19 соединен с первым входом блока формирования гидирующих сигналов 20, второй вход блока формирования лидирующих сигналов 20 выполняет роль управляющего входа гидирующей системы, первый выход блока формирования гидирующих сигналов 20 выполняет роль выхода гидирующей системы, а второй выход блока формирования гидирующих сигналов 20 соединен с входом монитора. Оптическая связь гидирующего лазера 22 с оптической системой 1 наземного комплекса осуществляется светоделителем 23, расположенным на пути луча зондирующего лазера 22 между оптическим фильтром 8 и оптической системой 1 наземного комплекса. В качестве отражателя 30 может быть использован уголковый отражатель.
Излучение гидирующего лазера 22 направляется оптической системой 1 наземного комплекса на ЛА 24, отражается отражателем 30, поступает в гидирующую оптическую систему 17, проходит через гидирующий оптический фильтр 18, пропускающий только излучение гидирующего лазера 22, после чего попадает на позиционно-чувствительный фотоприемник 19. Сигналы с выхода позиционно-чувствительного фотоприемника 19 поступают на вход блока формирования гидирующих сигналов 20. Сигналы с первого выхода блока формирования гидирующих сигналов 20 поступают на вход привода 7 оптической системы 1 наземного комплекса, в результате чего осуществляется слежение за исследуемым объектом 32. Сигналы с второго выхода блока формирования гидирующих сигналов 20 поступают на вход монитора 21, позволяющего оператору осуществлять визуальный контроль за процессом слежения. Убрав гидирующий оптический фильтр 18, оператор по экрану монитора 21 может осуществлять поиск исследуемого объекта 32, наведение на него и слежение за ним (после обнаружения исследуемого объекта 32 лидирующий оптический фильтр 18 устанавливается на свое место).
По команде оператора блок управления 13 формирует сигнал, поступающий на управляющий вход оптического переключателя 9, в результате чего оптический переключатель 9 подключает зондирующий лазер 10 к оптической системе 1 наземного комплекса, этот же сигнал поступает на управляющий вход зондирующего лазера 10, в результате чего зондирующий лазер 10 формирует импульс когерентного оптического излучения, который поступает в оптическую систему 1 наземного комплекса. Оптическая система 1 наземного комплекса направляет оптическое излучение на ЛА 24. После окончания импульса оптический переключатель 9 по команде блока управления 13 подключает оптическую систему 1 наземного комплекса к входу фотоприемного блока 14. Когерентное оптическое излучение проходит через земную атмосферу, часть его отражается от установленного на ЛА 24 отражателя 30, вторично проходит через земную атмосферу и поступает в оптическую систему 1 наземного комплекса, после чего попадает через оптический переключатель 9 на вход фотоприемного блока 14. Параметры сигнала на входе фотоприемного блока 14 содержат информацию о параметрах земной атмосферы. Электрический сигнал с выхода фотоприемного блока 14 поступает на информационный вход блока обработки 16, где происходит обработка сигналов, в результате чего определяются параметры земной атмосферы по трассе луча. Сигналы, описывающие параметры земной атмосферы, с выхода блока обработки 16 поступают на вход блока регистрации 15.
Когерентное оптическое излучение, попадающее на установленный на ЛА 24 отражатель 31, направляется им в соответствии с целеуказанием, пришедшим по радиоканалу с наземного пункта, на исследуемый объект 32. Разворот установленного на ЛА 24 второго отражателя 31 в требуемом направлении осуществляется следующим образом Команды на разворот установленного на ЛА 24 второго отражателя 31 с помощью антенны 12 приемопередатчика радиодиапазона 11 подаются на антенну 29 установленного на ЛА 24 приемопередатчика радиодиапазона 28. Сигналы с выхода установленного на ЛА 24 приемопередатчика радиодиапазона 28 поступают на первый вход установленного на ЛА 24 блока управления 27, который формирует сигналы, поступающие с его третьего выхода на вход привода установленного на ЛА 24 второго отражателя 31. Отраженное от установленного на ЛА 24 второго отражателя 31 излучение направляется к исследуемому объекту 32, отражается от его СВА и фокусируется установленной на ЛА 24 приемной оптической системой 25. Наведение установленной на ЛА 24 приемной оптической системы 25 на исследуемый объект 32 производится по радиоканалу с наземного пункта, причем сигналы на вход привода установленной на ЛА 24 приемной оптической системы 25 поступают с первого выхода установленного на ЛА 24 блока управления 27. Сигналы с выхода установленного на ЛА 24 фотоприемного блока 26 поступают на второй вход установленного на ЛА 24 блока управления 27, который преобразует их в требуемую форму и подает на вход установленного на ЛА 24 приемопередатчика радиодиапазона 28. По радиоканалу эти сигналы поступают через приемопередатчик радиодиапазона 11 на сигнальный вход блока обработки 16. Таким образом, на информационный вход блока обработки 16 поступают сигналы, несущие информацию о параметрах земной атмосферы на трассе от наземного пункта до ЛА 24 за счет прохождения оптического излучения по этой трассе в двух направлениях: от наземного пункта к ЛА 24 и обратно. На сигнальный вход блока обработки 16 поступают сигналы, несущие информацию одновременно о параметрах земной атмосферы за счет прохождения оптического излучения по трассе от наземного пункта до ЛА 24 и о параметрах СВА исследуемого объекта 32 за счет отражения оптического излучения от СВА исследуемого объекта 32. Блок обработки 16 производит совместную обработку сигналов, поступающих на его информационный и сигнальный входы, и подает на вход блока регистрации 15 сигналы, описывающие параметры земной атмосферы и параметры СВА исследуемого объекта 32.
В частном случае (п. 2 формулы изобретения) зондирующий лазер 10 может быть выполнен перестраиваемым по частоте. При этом зондирующий лазер 10 может работать в непрерывном или импульсном режиме. При его работе в непрерывном режиме частота зондирующего излучения измеряется по определенному периодическому закону (например, пилообразному или синусоидальному), а при его работе в импульсном режиме длительность импульса должна быть не меньше времени изменения текущего значения частоты зондирующего излучения в требуемом диапазоне. В блок обработки 16 через информационный вход поступает изменяющийся во времени сигнал, характеризующий зависимость пропускания как земной атмосферы, так СВА исследуемого объекта 32 от частоты излучения зондирующего лазера 10. Эти зависимости позволяют по стандартной методике определить концентрации составных частей земной атмосферы и СВА исследуемого объекта.
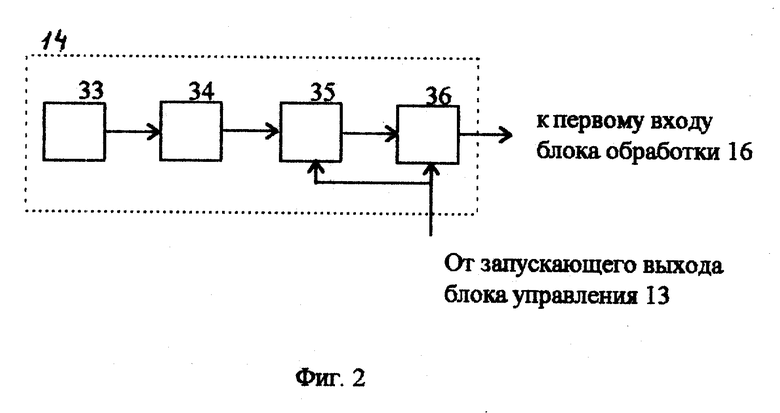
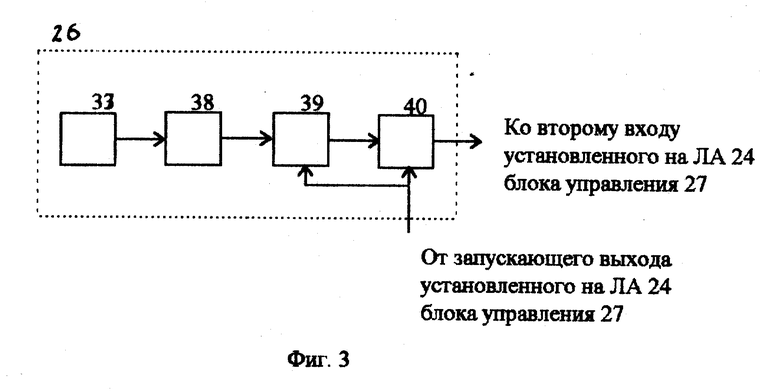
В частном случае (п. 3 формулы изобретения) фотоприемный блок 14 содержит (фиг. 2) первый частотный разделитель 33, первый фотоприемник 34, первый запоминающий блок 35 и первый считывающий блок 36, установленный на ЛА 24 фотоприемный блок 26 содержит (фиг. 3) второй частотный разделитель 37, второй фотоприемник 38, второй запоминающий блок 39 и второй считывающий блок 40, при этом первый частотный разделитель 33 и первый фотоприемник 34 расположены последовательно и оптически связаны, выход первого фотоприемника 34 соединен с входом первого запоминающего блока 35, выход первого запоминающего блока 35 соединен с входом первого считывающего блока 36, выход первого считывающего блока 36 соединен с информационным входом блока обработки 16, управляющий вход первого запоминающего блока 35 и управляющий вход первого считывающего блока 36 соединены с запускающим выходом блока управления 13, второй частотный разделитель 37 и второй фотоприемник 38 расположены последовательно и оптически связаны, выход второго фотоприемника 38 соединен с входом второго запоминающего блока 39, выход второго запоминающего блока 39 соединен с входом второго считывающего блока 40, выход второго считывающего блока 40 соединен с вторым входом установленного на ЛА 24 блока управления 27, а управляющий вход второго запоминающего блока 39 и управляющий вход второго считывающего блока 40 соединены с запускающим выходом установленного на ЛА 24 блока управления 27. Такое построение фотоприемного блока 14 и установленного на ЛА 24 фотоприемного блока 26 позволяет использовать спонтанное комбинационное рассеяние излучения зондирующего лазера 10 в земной атмосфере и в СВА исследуемого объекта 32. Использование спонтанного комбинационного рассеяния имеет ряд преимуществ, главное из которых заключается в том, что нет необходимости специально подбирать длину волны излучения зондирующего лазера, что обеспечивает универсальность любого выбранного типа зондирующего лазера 10. Кроме того, т. к. частоты спонтанного комбинационного рассеяния отстоят от частоты зондирующего излучения на достаточном расстоянии в спектре, то сравнительно легко избавиться от влияния аэрозольного и молекулярного рассеяния на частоте зондирующего излучения. Следует также отметить, что концентрацию молекулярного азота и молекулярного кислорода в земной атмосфере с достаточной для данных измерений точностью можно считать постоянной во времени, поэтому сигнал спонтанного комбинированного рассеяния на N2 или O2 можно использовать для нормировки получаемых сигналов спонтанного комбинационного рассеяния на исследуемых веществах.
Т. к. в фотоприемный блок 14 и установленный на ЛА 24 фотоприемный блок 26 отличаются только подключением выходов считывающих блоков и управляющих входов запоминающих блоков и считывающих блоков, то можно ограничиться рассмотрением работы только одного из фотоприемных блоков, например, фотоприемного блока 14.
Фотоприемный блок 14 работает следующим образом. При взаимодействии излучения зондирующего лазера 10 с компонентами земной атмосферы и СВА исследуемого объекта 32 за счет спонтанного (рамановского) комбинационного рассеяния в спектре принимаемого оптического излучения кроме линии, соответствующей частоте излучения зондирующего лазера 10, наблюдаются добавочные линии. Различие в частотах возбуждающей линии, соответствующей частоте зондирующего излучения, и появляющихся в спектре добавочных линий характерно для каждого рассеивающего вещества и равно частотам собственных колебаний молекул. Оптическая система 1 наземного комплекса направляет через оптический переключатель 9 принятое оптическое излучение в первый частотный разделитель 33, который осуществляет пространственное разделение спектральных линий принятого оптического излучения. В качестве первого частотного разделителя 33 может быть использована диспергирующая призма или дифракционная решетка, либо их комбинация. Спектральные составляющие с выхода первого частотного разделителя 33 поступают на вход первого фотоприемника 34. Первый фотоприемник 34 может быть выполнен в виде линейки или матрицы фотоприемных элементов. Сигналы с выхода первого фотоприемника 34 поступают на вход первого запоминающего блока 35. По командам, поступающим с запускающего выхода блока управления 13 на управляющий вход первого запоминающего блока 35, осуществляется стробирование принимаемых сигналов, т. е. выбор при необходимости того участка трассы, на котором необходимо произвести определение концентраций компонент земной атмосферы. По командам, поступающим с запускающего выхода блока управления 13 на управляющий вход первого считывающего блока 36, считывающий блок 36 производит считывание сигналов с выхода первого запоминающего блока 35. Эти сигналы, описывающие полученный спектр спонтанного комбинационного рассеяния, подаются с выхода первого считывающего блока 36 на информационный вход блока обработки 16. После окончания считывания спектра на управляющий вход первого запоминающего блока 35 с запускающего выхода блока управления 13 подаются команды, осуществляющие стирание сигналов в первом запоминающем блоке 35.
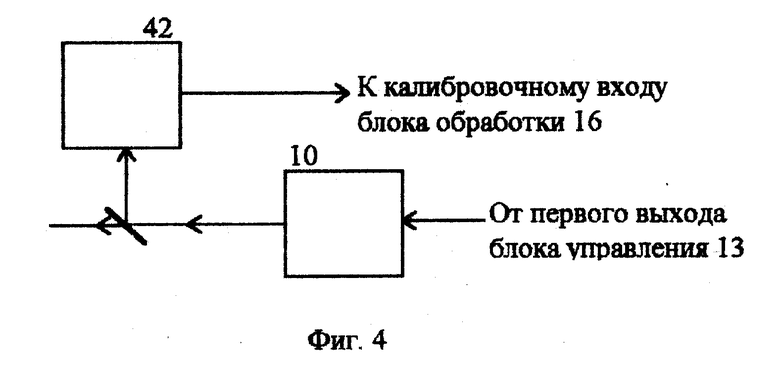
В частном случае (п. 4 формулы изобретения) на выходе зондирующего лазера 10 (фиг. 4) расположен второй светоделитель 41, а на пути отраженного от второго светоделителя 41 луча зондирующего лазера расположен калибровочный фотоприемник 42, выход которого соединен с калибровочным входом блока обработки 16. Такое построение системы мониторинга окружающего пространства позволяет повысить точность измерений путем определения точного значения мощности генерируемого задающим лазером 10 оптического излучения за счет того, что часть генерируемого зондирующим лазером 10 излучения направляется вторым светоделителем 41, коэффициент отражения которого заранее известен, на калибровочный фотоприемник 42, который измеряет мощность падающего на его светочувствительную поверхность оптического излучения и подает соответствующий сигнал на калибровочный вход блока обработки 16, который учитывает значение мощности зондирующего излучения при обработке результатов измерений.
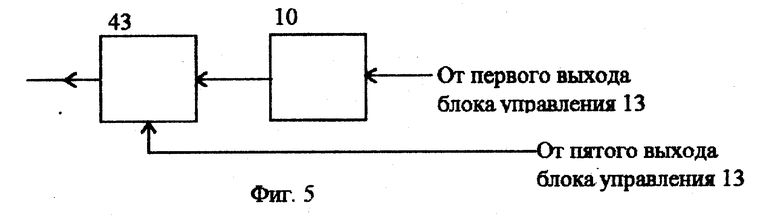
В частном случае (п. 5 формулы изобретения) на выходе зондирующего лазера 10 (фиг. 5) установлен частотный преобразователь 43, а его управляющий вход соединен с пятым выходом блока управления 13. Такое построение системы мониторинга окружающего пространства позволяет производить зондирование земной атмосферы и СВА исследуемого объекта 32 одновременно на двух неравных между собой длинах волн зондирующего излучения и проводить их совместную обработку, что приводит к повышению достоверности и точности измерений за счет устранения возможности искажения результатов измерений помехами различного происхождения.
Такой вариант построения системы мониторинга окружающего пространства работает следующим образом. По команде оператора блок управления 13 формирует сигнал, поступающий на управляющий вход зондирующего лазера 10, в результате чего зондирующий лазер 10 формирует импульс когерентного оптического излучения с длиной волны λ1 . При прохождении через частотный преобразователь 43 часть оптического излучения преобразуется в оптическое излучение с длиной волны λ2= λ1/k , где k - положительное число. Таким образом, на выходе частотного преобразователя 43 оптическое излучение представляет собой совокупность двух оптических сигналов с длинами волн λ1 и λ2 . Это излучение поступает в оптическую систему 1 наземного комплекса, которая направляет оптическое излучение в требуемую сторону. Оптическое излучение с длинами волн λ1 и λ2 взаимодействует с компонентами земной атмосферы и СВА исследуемого объекта 32, в результате чего в блок обработки 16 поступают сигналы, содержащие информацию о двух спектрах: один из них соответствует спонтанному комбинационному рассеянию оптического излучения с длиной волны λ1 на компонентах земной атмосферы и СВА исследуемого объекта 32, а второй - спонтанному комбинационному рассеянию оптического излучения с длиной волны λ2 на компонентах земной атмосферы и СВА исследуемого объекта 32. Совместная обработка этих спектров в блоке обработки 16 позволяет повысить достоверность измерений за счет устранения влияния помех. Величина k выбирается, исходя из конкретных условий эксплуатации системы мониторинга окружающего пространства. В простейшем случае, k может быть равно целому числу, например, двум, трем, четырем, ..., в этом случае частотный преобразователь 43 пропускает основную гармонику с длиной волны λ1 и формирует вторую (третью, четвертую,...,) гармонику. Изменение величины k производится по команде, поступающей с пятого выхода блока управления 13.
В частном случае (п. 6 формулы изобретения) на выходе частотного преобразователя 43 (фиг. 6) расположен третий светоделитель 44, на пути отраженного от третьего светоделителя 44 зондирующего луча расположен калибровочный частотный разделитель 45, на пути первого выходящего из калибровочного частотного разделителя 45 луча расположен калибровочный фотоприемник 42, на пути второго выходящего из калибровочного частотного разделителя 45 луча расположен второй калибровочный фотоприемник 46, выход калибровочного фотоприемника 42 соединен с калибровочным входом блока обработки 16, выход второю калибровочного фотоприемника 46 соединен с вторым калибровочным входом блока обработки 16, а управляющий вход калибровочного частотного разделителя 45 соединен с пятым выходом блока управления 13. Такое построение системы мониторинга окружающего пространства позволяет повысить точность измерений путем определения точных значений мощности оптического излучения с длиной волны λ1 и мощности оптического излучения с длиной волны λ2 за счет того, что часть выходящего из частотного преобразователя оптического излучения 43 направляется третьим светоделителем 44 (коэффициент отражения которого заранее известен как для оптического излучения с длиной волны λ1 так и для оптического излучения с длиной волны λ2 на вход калибровочного частотного разделителя 45, который осуществляет пространственное разделение оптического излучения с длинами волн λ1 и λ2 , причем оптическое излучение с длиной волны λ1 направляется калибровочным частотным разделителем 45 на вход калибровочного фотоприемника 42 а излучение с длиной волны λ2 направляется калибровочным частотным разделителем 45 на вход второго калибровочного фотоприемника 46. Калибровочный фотоприемник 42 измеряет мощность падающего на его светочувствительную поверхность оптического излучения с длиной волны λ1 и подает соответствующий сигнал на калибровочный вход блока обработки 16, который учитывает значение мощности зондирующего излучения с длиной волны λ1 при обработке результатов измерений. Второй калибровочный фотоприемник 46 измеряет мощность падающего на его светочувствительную поверхность оптического излучения с длиной волны λ2 и подает соответствующий сигнал на второй калибровочный вход блока обработки 16, который учитывает значение мощности зондирующего излучения с длиной волны λ2 при обработке результатов измерений. При изменении величины k т. е. при изменении величины λ2 , с пятого выхода блока управления 13 на управляющий вход калибровочного частотного разделителя 45 поступает с пятого выхода блока управления 13 команда, в соответствии с которой калибровочный частотный разделитель 45 перестраивает свои параметры таким образом, чтобы оптическое излучение с длиной волны λ2 попало на светочувствительную поверхность второго калибровочного фотоприемника 46.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Защита от оружия массового поражения. Под ред. В. В.Мясникова, M.: Воениздат, Библиотечка офицера, 1989, с. 237 - 245.
2. Методическое пособие к практическим занятиям по дисциплине "Оружие массового поражения и защита войск". Составители Г. Н. Дмитриев, Ф. С. Соколов, А. Т. Чишко, Э. В. Ложкин, Изд. МО СССР, 1982, с. 96 - 103.
3. Коломийцов Ю. В. Интерферометры. Л.: Машиностроение, 1976, с. 251-253.
4. Протопопов В. В. , Устинов Н. Д. Инфракрасные лазерные локационные системы. M.: Воениздат, 1987, с. 146-156.
5. Minato A., Suqimoto N., Sasano Y. Spectroscopic method for atmosferic trace species measurement using a satelite retroreflector. The Review of Laser Engineering. The Laser Society of Japan, v. 19. N 12, December 1991, p. 37-47.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ВЫДЕЛЕНИЯ ЦЕНТРА ИЗОБРАЖЕНИЯ ОБЪЕКТА ИЗЛУЧЕНИЯ | 1995 |
|
RU2104493C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЧАСТОТЫ ВХОДНОГО СИГНАЛА ПАНОРАМНОГО РАДИОПРИЕМНИКА | 1991 |
|
RU2025737C1 |
| УСТРОЙСТВО ДЛЯ РАСПОЗНАВАНИЯ ИМПУЛЬСНЫХ СИГНАЛОВ С ВНУТРИИМПУЛЬСНОЙ МОДУЛЯЦИЕЙ | 1990 |
|
RU2013002C1 |
| УСТРОЙСТВО ДЛЯ СОПРЯЖЕНИЯ ПРОЦЕССОРА С ПАМЯТЬЮ | 1991 |
|
RU2018941C1 |
| СПОСОБ ГАШЕНИЯ КОЛЕБАНИЙ ГРАВИТАЦИОННО-СТАБИЛИЗИРОВАННОГО СПУТНИКА | 1991 |
|
RU2034755C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ОПТИМАЛЬНОГО ПЕРИОДА ТЕХНИЧЕСКОГО СОСТОЯНИЯ ИЗДЕЛИЯ | 1991 |
|
RU2069894C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПЕРИОДА ТЕХНИЧЕСКОГО ОБСЛУЖИВАНИЯ ИЗДЕЛИЯ | 1992 |
|
RU2020585C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ РАДИОТЕЛЕМЕТРИЧЕСКИХ СИГНАЛОВ | 1994 |
|
RU2126139C1 |
| ДИСТАНЦИОННЫЙ ИЗМЕРИТЕЛЬ КОНЦЕНТРАЦИИ ВОЗДУШНЫХ ЗАГРЯЗНЕНИЙ | 1992 |
|
RU2045040C1 |
| СТЕНД ДЛЯ МОДЕЛИРОВАНИЯ СЕЙСМОВОЗДЕЙСТВИЯ ЯВЛЕНИЯ ЗЕМЛЕТРЯСЕНИЯ НА МОДЕЛИ СООРУЖЕНИЙ | 1991 |
|
RU2024955C1 |
Использование: изобретение относится к измерительной технике и может быть использовано для дистанционного измерения состава газопылевых выбросов различных объектов. Сущность изобретения заключается в переотражении на исследуемый объект приходящего к подвижному объекту излучаемого наземным комплексом когерентного оптического излучения и последующего его приема и обработки с учетом параметров земной атмосферы. 5 з.п.ф-лы, 6 ил.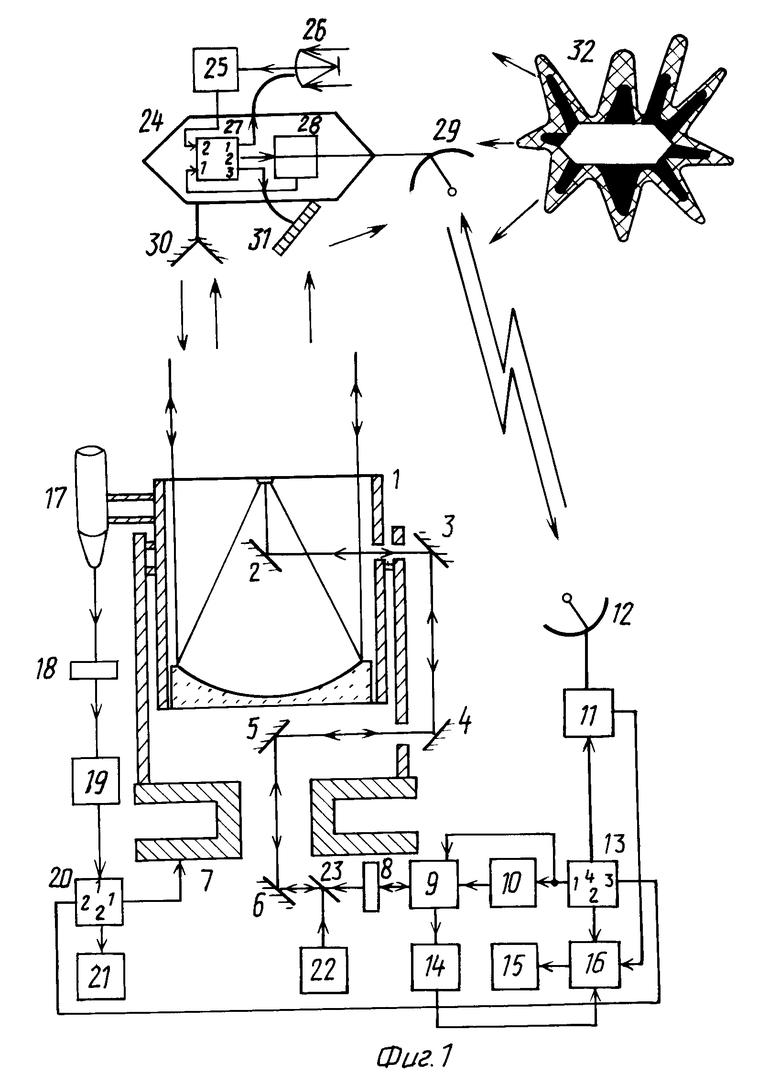
| Протопов В.В | |||
| и др | |||
| Инфракрасные лазерные локационные системы | |||
| - М.: Воениздат, 1987, с.145-156 | |||
| Minato A | |||
| et al | |||
| The Review of Laser Engineering | |||
| The haser Society of Japan | |||
| Циркуль-угломер | 1920 |
|
SU1991A1 |
