Изобретение относится к космической технике и может быть использовано в системе управления космического аппарата в качестве датчика ориентации.
Известен солнечный датчик, содержащий оптическую систему, сопряженную с ПЗС-линейкой, блок обработки сигналы и блок управления, позволяющий определить координаты светящегося объекта [4].
Недостатком известного устройства является невозможность решения задачи определения координат объекта в реальном масштабе времени.
Наиболее близким по технической и функциональной сущности к заявляемому изобретению является солнечный датчик [5], содержащий последовательно расположенные и оптически сопряженные оптическую систему и фотоприемный блок на основе прибора с зарядовой связью, два блока вычисления, запоминающее устройство и блок управления. Кроме того, в состав солнечного датчика входит блок обработки сигнала, подсоединенный к выходу фотоприемного блока и содержащий два канала, каждый из которых имеет в своем составе запоминающее устройство и последовательно расположенные блок умножения, сумматор, блок деления, блок вычисления коэффициентов, связанный с соответствующим блоком вычисления. К второму входу блока вычисления коэффициентов подключен выход запоминающего устройства. Третий сумматор замыкает выходы с фотоприемного блока на вторые входы блока деления. Первый и второй блоки управления выполнены идентично и соединены раздельными выходами с отдельными входами фотоприемного блока, блока умножения и запоминающего устройства соответствующего канала блока обработки сигнала.
Недостатком данного устройства является большое время, необходимое для получения решения, что обусловлено использованием для определения координат центра отфильтрованного изображения объекта метода средневзвешенного, реализованного последовательным алгоритмом обработки. Это определяет узость области практического использования, в частности, в тех случаях, где требуется получить решение в реальном масштабе времени.
Целью изобретения является уменьшение времени обработки изображения объекта излучения.
Поставленная цель достигается тем, что устройство, содержащее последовательно расположенные и оптически сопряженные оптическую систему и фотоприемный блок на основе прибора с зарядовой связью, запоминающее устройство, два блока вычисления и блок управления, дополнительно включает модель нейронной сети, число нейроподобных элементов которой равно числу фотоприемных элементов прибора с зарядовой связью, дополнительный и управляющий нейроподобные элементы, выходы которых соединены соответственно с первыми и вторыми входами блоков вычисления, подключенных своими выходами к отдельному входу модели нейронной сети, три цепочки, состоящих из регистра обмена и блока ключей, в каждой из которых группа выходов регистра обмена подсоединена к группе входов блока ключей, четвертый блок ключей, соединяющий группу выходов регистра обмена второй и группу входов регистра обмена третьей цепочки, пятый блок ключей, соединяющий группу выходов регистра обмена первой и группу входов регистра обмена третьей цепочки, шестой блок ключей, к группе входов которого через регистр обмена второй цепочки подсоединена группа выходов модели нейронной сети, причем в третьей цепочке группа выходов блока ключей совместно с группой выходов запоминающего устройства подсоединены к первой группе входов управляющего нейроподобного элемента, в первой цепочке к группе входов регистра обмена подсоединена группа выходов фотоприемного блока, а группа выходов блока ключей совместно с группой выходов блока ключей второй цепочки подсоединены к группам входов дополнительного нейроподобного элемента, модели нейронной сети и к второй группе входов управляющего нейроподобного элемента, соединенного выходом с входом блока управления, в блоке управления первый выход связан с синхронизирующими входами блока ключей первой цепочки, пятого и шестого блока ключей, регистров обмена второй и третьей цепочки, запоминающего устройства, второй выход - синхронизирующими входами каждого из элементов второй и третьей цепочки и четвертого блока ключей, третий выход - с синхронизирующими входами фотоприемного блока и регистра обмена первой цепочки.
В частном случае блок управления содержит задающий генератор, счетчик, схему сравнения, запоминающий элемент и блок переключения, при этом выход задающего генератора является третьим выходом блока управления и соединен с первым входом блока переключения и входом счетчика, выход которого подключен к первому входу схемы сравнения, к второму входу которой подсоединен выход запоминающего элемента, а выход - к второму входу блока переключения, третий вход блока переключения является входом, а два выхода - первым и вторым выходами блока управления.
Сущность изобретения заключается в следующем. Поставим в соответствие каждой точке (x, y) ∈ x х y изображающей плоскости значение потенциала [I], определяемого входным изображением на множестве точек Ω : ,
,
где T(x,y,x′y′) = -λ[(x′-x)2+ (y′-y)2]; λ > 0 ,
f(x', y') определяется выражением ,
,
Можно показать [1], что потенциал S(x, y) достигает максимума в центре изображения объекта (x*, y*). Таким образом, задача выделения центра изображения объекта излучения сводится к задаче поиска максимума потенциала S(x, y).
Для прямоугольника вычисление потенциала центральной точки приводит к следующему выражению: ,
,
где d - площадь прямоугольника;
p - периметр прямоугольника.
Из этого выражения следует, что среди всевозможных прямоугольников, имеющих одинаковую площадь, максимальное значение потенциала центральной точки будет у прямоугольника с минимальным периметром. Поскольку среди всевозможных по форме плоских фигур при равных площадях минимальным периметром обладает круг, то значение потенциала центральной точки произвольной плоской фигуры всегда будет меньше значения потенциала центра круга той же площади.
Вычисляя значение потенциала для произвольной точки круга, получим следующее соотношение:
где r(x, y)- расстояние от центра круга до точки с координатами (x, y).
Таким образом, значение потенциала в любой точке круга будет лежать в диапазоне:
Выражение для значения потенциала в произвольной точке прямоугольника будет иметь вид:
Поскольку потенциал зависит от расстояния между центром прямоугольника и точкой (x, y), то множество точек плоскости с потенциалом, превышающим значение 3λd2/(2π) где d - площадь прямоугольника, будет представлять собой круг с центром в центре прямоугольника. Более того, как показали исследования, и для произвольной фигуры данный порог будет выделять на плоскости фигуру, близкую к кругу с центром, совпадающим с центром произвольной фигуры. Действительно, производя замену переменных u = x' - x*, y = y' - y* в интеграле (1), получим:
где rx = x* - x, ry = y* - y - проекции вектора расстояния от центра фигуры до точки (x, y).
Из (6) следует, что потенциал произвольной точки фигуры может быть представлен в виде
Первое слагаемое в выражении (7) определяет уровень максимального значения потенциала, то есть потенциал в центре фигуры. Третье слагаемое представляет собой произведение квадрата расстояния произвольной точки фигуры от центра на площадь фигуры и инвариантно относительно направления радиус-вектора, проведенного из центра фигуры. Второе слагаемое обнуляется для осесимметричной фигуры. Это означает, что множество точек плоскости с потенциалом, превышающим значение -3λd2/(2π) , для осесимметричной фигуры будет представлять собой круг с центром, совпадающим с центром фигуры. В случае отсутствия у фигуры осевой симметрии второе слагаемое будет представлять собой взятые с обратным знаком добавки к потенциалу от областей, дополняющих фигуру до осесимметричной. Однако и в этом случае форма фигуры, отделяемой на плоскости порогом -3λd2/(2π) , будет близка к кругу, поскольку третье слагаемое будет значительно превышать второе благодаря наличию множителя, пропорционального квадрату расстояния точки (x, y) от центра фигуры. Теперь, если организовать итерационный процесс последовательного выделения точек плоскости с потенциалом, превышающим значение -3λd2/(2π) , для фигуры, полученной на предыдущем шаге, то этот процесс сходится к кругу с центром, совпадающим с центром исходной фигуры. Определение центра круга не составляет проблемы, и задачу можно считать решенной.
Технический результат, который может быть получен от использования изобретения, заключается в том, что по сравнению с рассмотренными аналогом и прототипом оно позволяет определить центр изображения объекта излучения произвольной формы за время, равное нескольким тактам работы устройства. Таким образом, достигается решение задачи в реальном масштабе времени.
На фиг. 1 дана структурная схема заявляемого устройства; на фиг. 2 - то же, нейроподобного элемента; на фиг. 3 - варианты выходных характеристик нейроподобных элементов; на фиг. 4 - структурная схема блока ключей 13 (14 - 18);
Заявляемое устройство для выделения центра изображения объекта излучения содержит (фиг. 1) последовательно расположенные и оптически сопряженные оптическую систему 1 и фотоприемный блок 2 на основе прибора с зарядовой связью (ФПЗС), модель нейронной сети 3, объединяющую в себя нейроподобные элементы (нейроны), количество которых равно числу чувствительных элементов прибора с зарядовой связью, дополнительный 4 и управляющий 5 нейроны, выходы которых соединены соответственно с первыми и вторыми входами блоков вычисления 6, 7, подключенных выходами к отдельному входу модели нейронной сети 3, запоминающее устройство 3, блок управления 9, три цепочки, состоящих из регистра обмена 10 (11, 12) на входе и блока ключей 13 (14, 15) на выходе, в каждой из которых группа выходов регистра обмена 10 (11, 12) подсоединена к группе входов блока ключей 13 (14, 15), четвертый блок ключей 16, соединяющий группу выходов регистра обмена 11 второй и группу входов регистра обмена 12 третьей цепочки, пятый блок ключей 17, соединяющий группу выходов регистра обмена 10 первой цепочки и группу входов регистра обмена 12 третьей цепочки, шестой блок ключей 18, к группе входов которого подсоединена группа выходов регистра обмена 11 второй цепочки. Третья цепочка группой выходов блока ключей 15 подсоединена совместно с группой выходов запоминающего устройства 8 к первой группе входов управляющего нейрона 5. Первая цепочка связывает группу выходов ФПЗС 2, а вторая цепочка -группу выходов модели нейронной сети 3 с группами входов дополнительного нейрона 4, модели нейронной сети 3 и второй группой входов управляющего нейрона 5. Выход управляющего нейрона 5 соединен с входом блока управления 9, выходы которого соединены соответственно: первый - с синхронизирующими входами блока кличей 13 первой цепочки, пятого 17 и шестого 18 блока ключей, регистров обмена 11, 12 второй и третьей цепочки, запоминающего устройства 8, второй выход - с синхронизирующими входами регистров обмена 11, 12 и блоков ключей 14, 15 второй и третьей цепочки, четвертого блока ключей 16, третий выход - с синхронизирующими входами ФПЗС 2 и регистра обмена 10 первой цепочки.
В частном случае блок управления 3 содержит задающий генератор 19, счетчик 20, схему сравнения 21, запоминающий элемент 22 и блок переключения 23, при этом выход задающего генератора 19 является третьим выходом с3 блока управления 3 и соединен с первым входом блока переключения 23 и входом счетчика 20, выход которого подключен к первому входу схемы сравнения 21, к второму входу которой подсоединен выход запоминающего элемента 22, а выход - к второму входу блока переключения 23, третий вход блока переключения 23 является входом, а два выхода - первым c1 и вторым c2 выходами блока управления 9.
Для нейросетевой реализации алгоритма выделения центра изображения объекта излучения поставим в соответствие каждому чувствительному элементу ФПЗС 2 нейрон [2], выходной сигнал которого определяется следующим выражением
где 
Входом для сети служит бинарная матрица {fμν}, значения элементов которой равны единице, если засвечены соответствующие чувствительные элементы ФПЗС, и нулю - в противном случае. Функцию активации нейрона зададим релейной: .
.
Значения порогов Iij в выражении (8) во время итерационного процесса устанавливаются равными 3λd2(K)/(2π) и переключаются на значение λ(1+ε)d(K)/(2π) после окончания итераций. Здесь d(k) определяет площадь фигуры и вычисляется в соответствии с выражениями: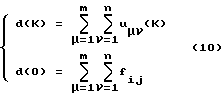
Для обеспечения функционирования устройства выходные сигналы дополнительного 4 и управляющего 5 нейронов, а также первого 6 и второго 7 блоков вычисления опишем следующими выражениями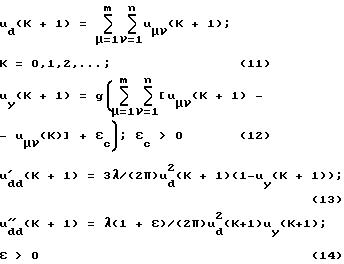 ,
,
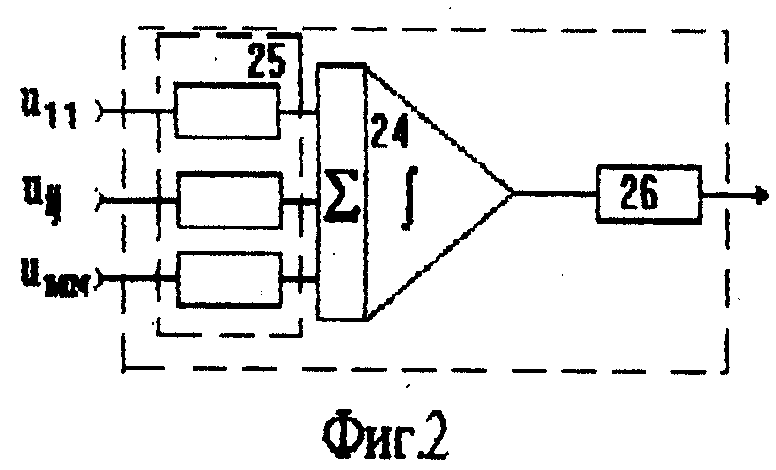
Каждый нейрон содержит согласно фиг. 2 суммирующий усилитель-интегратор 24, блок 25 умножителей информационных входов uij на синаптические коэффициенты и логический блок 26.
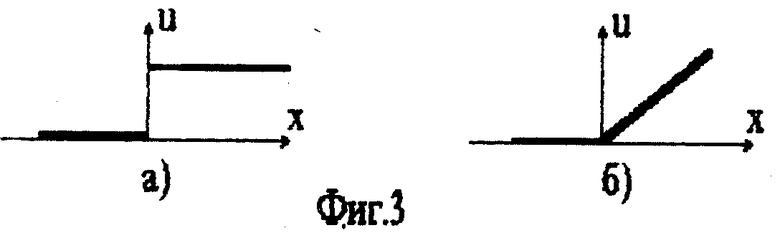
В модели нейтронной сети 3 число информационных входов равно mn + 1, где m - число строк, n - число чувствительных элементов в каждой строке ФПЗС 2, значение первого синаптического коэффициента в блоке умножителей 25 равно -1, а остальных, образующих группу входов, задается выражением (8), выходная характеристика логического блока 26 представлена на (фиг.3,a).
Управляющий нейрон 5 имеет 2 mn информационных входов, первая группа которых умножается на синаптические коэффициенты, равные - 1, а вторая - на +1. Все mn информационных входов дополнительного нейрона 4 умножаются на синаптические коэффициенты, равные +1. Выходная характеристика логических блоков 26 дополнительного 4 и управляющего 5 нейронов изображена на фиг.3,б.
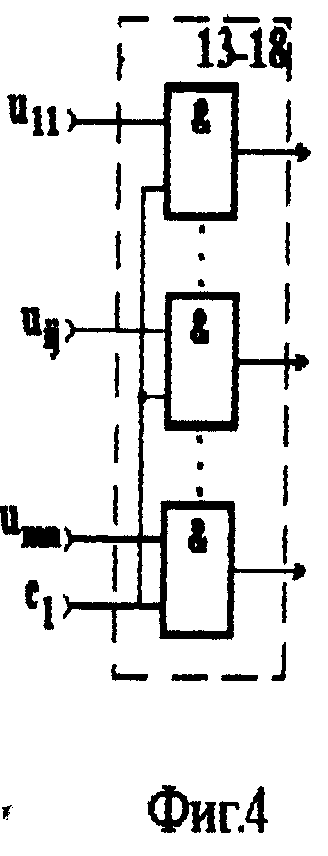
Блок ключей 13 (14 - 18) содержит mn элементов И, один вход которых является информационным, а второй синхронизирующим, общим для всех элементов.
Принципиальная схема регистра обмена 10 (11, 12) может быть построена по известной схеме 3 на базе двухтактного D-триггера.
Работает предлагаемое устройство следующим образом.
Сигнал от объекта излучения формируется в виде изображения оптической системой 1 на поверхности ФПЗС 2, где преобразуется в электрический сигнал, пропорциональный освещенности фоточувствительной поверхности. Динамику выделения центра входного изображения опишем в соответствии с логикой работы блока управления 9. Синхронизирующие импульсы блока управления 3 с его третьего выхода обеспечивают считывание информации с элементов ФПЗС 2 в регистр обмена 10. Когда количество формируемых задающим генератором 19 импульсов станет равно хранящемуся в запоминающем элементе 22 числу элементов ФПЗС 2, схема сравнения 21 выдает сигнал в блок переключения 23, который пропускает от задающего генератора 19 очередной синхронизирующий импульс на первый c1, а все последующие - на второй c2 выходы блока управления 9 до тех пор, пока выход управляющего нейрона 5 не станет равным единице. После чего оба выхода c1 и c2 блока переключения 23 запираются. По импульсу с выхода c1 блока управления 9 через блок ключей 18 из регистра обмена 11 на выход устройства поступает полученный на предыдущем цикле результат выделения центра изображения. В дополнительном нейроне 4 в соответствии с алгоритмом (11) осуществляется подсчет числа засвеченных чувствительных элементов (площадь d входного изображения), а в управляющем нейроне 5 согласно выражению (12) вычисляется разность между вычисляемой величиной d и хранящимися в запоминающем устройстве 8 общим числом фоточувствительных элементов ФПЗС 2. При отрицательной разности выход управляющего нейрона 5 равен нулю и на отдельный вход модели нейронной сети 3 подается смещение, формируемое согласно выражения (13) блоком вычисления 6, а на группу входов через блок ключей 13 - входной сигнал устройства с регистра обмена 10. Результат преобразований, являющийся отображением некоторой окрестности центра входного изображения, с выхода модели нейронной сети 3 записывается в регистр обмена 11. Кроме того, входной сигнал с регистра обмена 10 через блок ключей 17 записывается в регистр обмена 12. Следующий синхронизирующий импульс формируется на выходе c2 блока управления 9. На этом такте на группы входов модели нейронной сети 3 и дополнительного нейрона 4, а также на вторую группу входов управляющего нейрона 5 поступает через блок ключей 14 содержимое регистра обмена 11, на первую группу входов управляющего нейрона 5 через блок ключей 15 - содержимое регистра обмена 12. По окончании этого также результат преобразований в модели нейронной сети 3 записывается в регистр обмена 11, а ранее хранящийся в нем код через блок ключей 16 переписывается в регистр обмена 12. Процесс преобразований будет продолжаться, пока площадь фигуры, выделенной моделью нейронной сети 3, не перестанет изменяться от такта к такту. По достижении стабильности изображения, выделяемого моделью нейронной сети 3, на выходе управляющего нейрона 5 вырабатывается единица, тогда на отдельный вход модели нейронной сети 3 подается смещение, формируемое блоком вычисления 7 согласно выражения (14). Двоичный код, записываемый с выхода модели нейронной сети 3 в регистр обмена 11, будет содержать информацию о координатах центра анализируемого входного изображения. Единица, пришедшая с выхода управляющего нейрона 5 на вход блока управления 9, запирает его выходы c1, c2.
Список литературы:
1. Бобровский А.И., Ефимов В.Е. Определение центра изображения объекта с помощью нейроподобных сетей // Методы анализа и синтеза систем автоматического управления: Учебн. метод. пос.- Л.: ВИКА им. А.Ф.Можайского, 1994, с. 23 - 29.
2. Уоссермен Ф. Нейрокомпьютерная техника: Теория и практика. - М.: Мир, 1992, 240 с.
3. Трудов Ю.В. Основы построения ЭВМ. - Л.: ВИКИ им. А.Ф.Можайского, 216 с.
4. Авторское свидетельство 1779932, СССР, Солнечный датчик. Э.И.Витриченко, В.В.Щербаков // Б.И., 1992, N 45.
5. Авторское свидетельство СССР 1 779 931, Солнечный датчик. Б.С.Дунаев, Я.Л.Зиман, Ю.М.Чесноков // Б.И., 1992, N 45.
Использование: в космической технике, а именно в системах управления космического аппарата в качестве датчика ориентации. Устройство содержит последовательно соединенные оптическую систему и фотоприемный блок на основе прибора с зарядной связью, канал обработки изображения, включающий дополнительный и управляющий нейрон 4, 5, два блока вычисления, модель нейронной сети 3, запоминающее устройство 22, две длины обратной связи. Блок управления 9 синхронизирует работу устройства в целом. 1 з.п. ф-лы, 4 ил.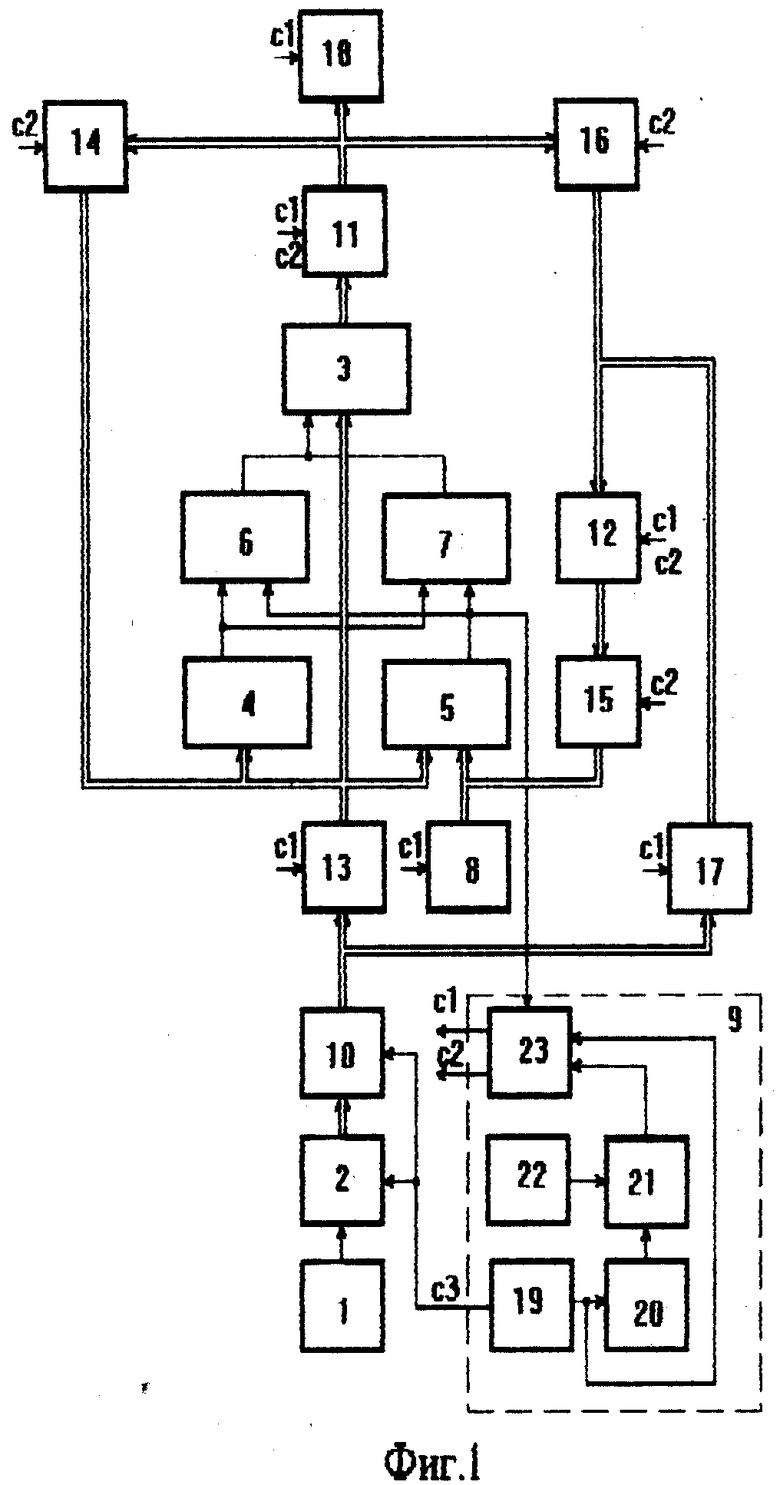
| SU, авторское свидетельство, 1779932, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| SU, авторское свидетельство, 1779931, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
