Изобретение относится к области измерительной техники и может найти применение в экспериментальной гидро- и аэродинамике, исследовании однофазных и многофазных сред, а также в промышленных технологиях, связанных с необходимостью невозмущающего контроля параметров механического движения.
Известны способы измерений вектора скорости. В [1] описан способ измерения вектора скорости, заключающийся в том, что в исследуемую среду направляются три зондирующих лазерных пучка, которые пересекаются под прямыми углами друг к другу, выделяются рассеянные пучки по направлениям, обратным направлениям зондирующих лучей, выполняют гетеродинное фотоэлектрическое преобразование каждого из трех выделенных рассеянных пучков и измеряют частоты полученных сигналов, являющиеся известными линейными функциями компонент скорости по направлениям векторов чувствительности, каждый из которых является разностью волновых векторов выделенного рассеянного пучка и соответствующего зондирующего лазерного луча.
Основным недостатком этого способа является большой телесный угол, занимаемый совокупной пространственной конфигурацией зондирующих лазерных лучей, что ограничивает возможность применения для измерений в малых объемах и в приповерхностных областях. Эти недостатки особенно сильно проявляются при реализации способа средствами оптиковолоконной техники. В качестве других недостатков можно указать на сложность реализации способа средствами объемной оптики, связанную с необходимостью создания трех интерферометрических измерительных каналов, а также несогласованность измерительной системы координат с общепринятыми в экспериментальной гидро- и аэродинамике направлениями координатных осей при измерениях в потоках.
Другой известный способ лазерного измерения вектора скорости описан в [2] . Он заключается в том, что в исследуемую область потока направляется 5 пересекающихся в заданной точке лучей, причем три из них образуют трехпучковую конфигурацию с двумя ортогонально ориентированными разностными векторами чувствительности, задающими направления двух ортогональных координатных осей измерительной системы. Третью ортогональную координатную ось задают разностным вектором чувствительности в двухлучевой конфигурации. Рассмотренные пучки, несущие информацию о соответствующей компоненте вектора скорости, селектируют по хроматическому признаку. Выполняют фотоэлектрическое преобразование выделенных рассеянных пучков, измеряют частоты полученных электрических сигналов и преобразуют измеренные частоты в значения соответствующих компонент вектора скорости по линейным соотношениям, определяемым конфигурацией системы зондирующих лазерных лучей.
Основным недостатком этого способа является большой телесный угол, занимаемый пятилучевой пространственной конфигурацией, и необходимость приведения системы координат прибора к общепринятой координатной системе, используемой при измерениях в гидро- и аэродинамических стендах.
Ближайшим аналогом предлагаемого способа является способ лазерного измерения вектора скорости, описанный в [3]. Способ заключается в том, что в исследуемую область направляются лазерные лучи, формирующие зондирующие поля с заданными векторами чувствительности. Выделяют световые пучки, рассеянные в зондирующем поле. Выполняют электрическое гетеродинное преобразование выделенных рассеянных пучков. Селектируют электрические сигналы с частотами, соответствующими проекциям вектора скорости на заданные вектора чувствительности. Измеряют частоты селектированных электрических сигналов. Преобразуют измеренные частоты в значения соответствующих компонент вектора скорости посредством известных линейных преобразований, определяемых пространственной конфигурацией векторов чувствительности зондирующих полей. Основными недостатками этого способа является отсутствие информации о компоненте вектора скорости, направленной по биссектрисе угла между лазерными лучами, формирующими зондирующее поле.
В основу изобретения положена задача разработки метода, позволяющего измерять с высокой чувствительностью ортогональные компоненты вектора скорости, включая осевую, направленную по биссектрисе угла между лазерными лучами, формирующими зондирующее поле в 2-, 3-, 4- или многолучевой конфигурации. Это обеспечивает возможность создания измерителей вектора скорости с компактной конфигурацией, что особенно важно, например, при разработке оптиковолоконных измерительных систем.
Задача решается тем, что в способе лазерного измерения вектора скорости, заключающемся в том, что в исследуемую среду направляются лазерные лучи, формирующие зондирующие поля с заданными векторами чувствительности, выделяются световые пучки, рассеянные в зондирующем поле, выполняется фотоэлектрическое гетеродинное преобразование выделенных рассеянных пучков, селектируются электрические сигналы с частотами, соответствующими проекциям вектора скорости на вектора чувствительности, измеряются частоты селектированных электрических сигналов, а измеренные частоты преобразуются в значения соответствующих компонент вектора скорости посредством линейных преобразований, определяемых пространственной конфигурацией, согласно изобретению, определение взаимно ортогональных компонент вектора скорости осуществляют путем попарного вычитания и суммирования частот электрических сигналов, соответствующих проекциям вектора скорости на вектор чувствительности в выбранной паре, причем модули этих векторов чувствительности задают равными между собой. В дифференциальной конфигурации лазерных лучей измеряют суммарную или разностную частоту компоненты квадратично преобразованного сигнала, соответствующего гетеродинному фотосмешению суперпозиции световых пучков, рассеянных в направлении биссектрисы угла между зондирующими лазерными лучами. В инверсно-дифференциальной конфигурации лазерных лучей измеряют суммарную или разностную частоту компоненты квадратично преобразованного сигнала, соответствующего гетеродинному фотосмешению световых пучков, рассеянных в направлениях, симметричных относительно измеряемой компоненты вектора скорости и компланарных с ней.
На фиг. 1 приведена схема устройства, реализующего предлагаемый способ. Устройство содержит источник когерентного излучения (лазер) 1, делитель светового луча 2, оптические согласующие элементы 3-4, оптиковолоконные датчики 5-6, оптические ответвители 7-8, фотоприемники9-10, измерители доплеровского сдвига частоты 11-12, измеритель суммы частот 13, измеритель разности частот 14.
Устройство действует следующим образом.
Световой пучок с волновым вектором  оптиковолоконным датчиком i-го измерительного канала направляется в исследуемую область потока. Здесь i - номер оптиковолоконного датчика. Рассеянный свет с волновым вектором
оптиковолоконным датчиком i-го измерительного канала направляется в исследуемую область потока. Здесь i - номер оптиковолоконного датчика. Рассеянный свет с волновым вектором  направляется в оптиковолоконный датчик и далее на гетеродинный фотоприемник, где трансформируется в фотоэлектрический сигнал, частота которого ωDi равна доплеровскому сдвигу частоты в рассеянном пучке [4]:
направляется в оптиковолоконный датчик и далее на гетеродинный фотоприемник, где трансформируется в фотоэлектрический сигнал, частота которого ωDi равна доплеровскому сдвигу частоты в рассеянном пучке [4]: .
.
Или , ,
,
где - вектор чувствительности.
- вектор чувствительности.
Следовательно, доплеровский сдвиг частоты в i-ом измерительном канале равен скалярному произведению вектора скорости и вектора чувствительности. Это выражение для доплеровского частотного сдвига означает, что гетеродинный измерительный канал измеряет проекцию вектора скорости  на разностный волновой вектор
на разностный волновой вектор  , ориентированный вдоль оптической оси i-го оптического оптиковолоконного датчика.
, ориентированный вдоль оптической оси i-го оптического оптиковолоконного датчика.
Для первого (i= 1) и второго (i=2) гетеродинных измерительных каналов имеем: .
.
Здесь  . Разность частот на выходе первого и второго измерительных каналов:
. Разность частот на выходе первого и второго измерительных каналов:
Из выражения (2) следует, что разностная частота ωD21 пропорциональна проекции скорости на разностный волновой вектор  , ортогональный биссектрисе угла 2θ и параллельный оптической оси y.
, ортогональный биссектрисе угла 2θ и параллельный оптической оси y.
Поскольку скорость рассеивающих частиц много меньше скорости света, модули волновых векторов падающих и рассеянных световых пучков с большой точностью можно принять одинаковыми,  . Для
. Для  скалярная форма выражения (2) следует из фиг. 1:
скалярная форма выражения (2) следует из фиг. 1:
ωD21= 4vksinθsinφ = vу4ksinθ (3) ,
где
4k sinθ - модуль разностного вектора, - волновое число,
- волновое число, ,
,
2θ - угол между волновыми векторами  зондирующих лучей,
зондирующих лучей,
φ - угол между вектором скорости  и биссектрисой угла 2θ .
и биссектрисой угла 2θ .
На выходе сумматора частот первого и второго каналов имеем:
т. е. суммарная частота  пропорциональна проекции вектора скорости на сумму векторов чувствительности
пропорциональна проекции вектора скорости на сумму векторов чувствительности  или в скалярной форме:
или в скалярной форме:
Из фиг. 1 видно, что суммарный вектор направлен вдоль биссектрисы угла 2θ и соответственно оси x. Взаимная ортогональность разности и суммы векторов чувствительности  означает равенство нулю скалярного произведения:
означает равенство нулю скалярного произведения:
Преобразуя (6), получаем:
Поскольку 
Отсюда
Следовательно, необходимым условием для ортогональности векторов  является равенство модулей векторов чувствительности
является равенство модулей векторов чувствительности  . Взаимно ортогональным векторам
. Взаимно ортогональным векторам  сопоставляются соответствующие взаимно ортогональные координатные оси Oy u Ox. Таким образом, измеряя разностную и суммарную частоты на выходах гетеродинных измерительных каналов 1 и 2, получим информацию об ортогональных компонентах vx и vy вектора скорости
сопоставляются соответствующие взаимно ортогональные координатные оси Oy u Ox. Таким образом, измеряя разностную и суммарную частоты на выходах гетеродинных измерительных каналов 1 и 2, получим информацию об ортогональных компонентах vx и vy вектора скорости  .
.
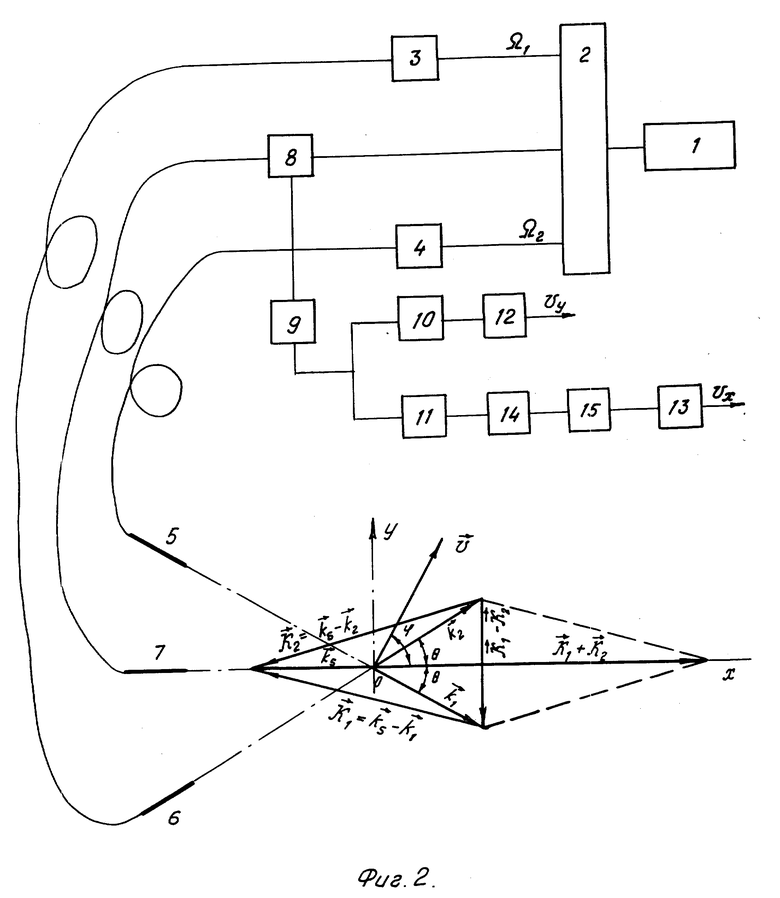
На фиг. 2 показан другой пример реализации предлагаемого способа для измерения двух ортогональных компонент вектора скорости. Устройство основано на двухпучковой дифференциальной конфигурации [4] в оптиковолоконном исполнении. Устройство содержит лазер 1, делитель светового луча 2, оптически согласующие элементы 3-4, оптиковолоконный формирователь зондирующего поля 5-6, приемный оптиковолоконный элемент 7, оптический смеситель 8, фотоприемник 9, полосовые фильтры 10-11, измерители частоты 12-13, квадратичный преобразователь 14 и полосовой фильтр 15.
Устройство действует следующим образом.
Делитель 2 преобразует луч лазера 1 в три пучка с заданной однополосной частотной модуляцией. Световые лучи, направляемые через согласующие элементы 3 и 4 в оптиковолоконные излучатели 5 и 6, имеют заданные частотные сдвиги Ω1 и Ω2 . Оптиковолоконные излучатели направляют лазерные лучи под известным углом 2θ между осями в исследуемую среду, где в области их пересечения формируется зондирующее поле. Свет, рассеянный по направлению биссектрисы угла 2θ , воспринимается оптиковолоконным элементом 7 и по световоду направляется в смеситель 8, где пространственно совмещается с референтным пучком, подведенным по световоду из делителя 2. Фотоприемник 9 выполняет гетеродинное фотоэлектрическое преобразование рассеянного и референтного пучков.
Рассеянный свет, воспринимаемый оптиковолоконным датчиком 7, является суперпозицией двух пучков, рассеянных в зондирующем поле от лазерных лучей волновыми векторами  . Световой пучок, рассеянный от первого лазерного пучка, имеет, согласно (1), частотный сдвиг
. Световой пучок, рассеянный от первого лазерного пучка, имеет, согласно (1), частотный сдвиг
где - волновой вектор рассеянного пучка.
- волновой вектор рассеянного пучка.
Частотный сдвиг светового пучка, рассеянного от второго лазерного луча, описывается выражением
где .
.
Фотоприемник 9 осуществляет квадратичное фотосмешение суперпозиции рассеянных и референтного пучков. В результате в фотоэлектрическом сигнале появляются компоненты с комбинационными частотами ω12, ω1(8) и ω2 (9) , где .
.
Электрический сигнал с разностной частотой ω12 селектируется полосовым фильтром 10 и представляет собой обычный сигнал дифференциальной схемы лазерного анемометра [4]. Измеритель 12 дает значение этой частоты, являющейся известной функцией проекции вектора скорости на направление вектора  , являющегося разностью векторов чувствительности
, являющегося разностью векторов чувствительности  и задающего направление координатной оси Oy.
и задающего направление координатной оси Oy.
Суперпозиция электрических сигналов с частотами ω1 и ω2 , получающаяся при гетеродинном фотоэлектрическом преобразовании рассеянных пучков, селектируется полосовым фильтром 11 и направляется на квадратичный преобразователь 14. На выходе квадратичного преобразователя появляются компоненты сигнала, частоты которых равны суммарной ωx и разностной ω12 (10) частотам:
ωx= ω1+ω2= Ω1+Ω2+ωDx, (11)
где .
.
Полосовой фильтр 15 выделяет компоненту электрического сигнала с суммарной частотой (11), которая измеряется измерителем 13. Как видно из (11), частота ωx является известной линейной функцией проекции вектора скорости  на вектор, равный сумме векторов чувствительности
на вектор, равный сумме векторов чувствительности  и задающий направление координатной оси Ox. Скалярная форма этой зависимости имеет вид:
и задающий направление координатной оси Ox. Скалярная форма этой зависимости имеет вид: .
.
Здесь
2θ - угол между волновыми векторами  зондирующих лучей, ϕ - угол между вектором скорости
зондирующих лучей, ϕ - угол между вектором скорости  и вектором
и вектором  .
.
Это выражение следует из фиг. 2, поскольку  .
.

Таким образом, двухлучевая гибридная конфигурация дифференциальной и гетеродинной схем обеспечивает возможность измерения двух ортогональных компонент вектора скорости. По сравнению с трехпучковой дифференциальной конфигурацией измерительной схемы, описанной в [4, c.100], предлагаемый способ обеспечивает более высокую чувствительность при измерении компоненты скорости, направленной по биссектрисе угла между зондирующими лучами. В схеме, описанной в [4], выражение (5.3) на стр. 100, связывающее частоту ωDx и проекцию вектора скорости на биссектрису угла 2θ , имеет вид (в сопоставимых обозначениях): .
.
Из сравнения этого выражения с (12) видно, что выигрыш в чувствительности будет  . Например, для типичной величины угла θ = 10° выигрыш в чувствительности составляет ctg2(5o)=100.
. Например, для типичной величины угла θ = 10° выигрыш в чувствительности составляет ctg2(5o)=100.
Описанная реализация предлагаемого способа особенно эффективна в оптоволоконном исполнении.
На фиг. 3 показан следующий пример реализации предлагаемого способа для измерения двух ортогональных компонент вектора скорости. Устройство основано на инверсно-дифференциальной конфигурации [4] зондирующих лучей в оптиковолоконном исполнении. Устройство содержит лазер 1, делитель светового пучка 2, оптический согласующий элемент 3, оптиковолоконный формирователь зондирующего поля 4, приемные оптиковолоконные элементы 5-6, оптический смеситель 7, фотоприемник 8, полосовые фильтры 9-10, измерители частоты 11-12, квадратичный преобразователь 13, полосовой фильтр 14.
Устройство действует таким образом.
Делитель 2 преобразует луч лазера в два пучка с заданной разностью частот Ωo между ними. Один из этих пучков, имеющий большую интенсивность, используется для формирования зондирующего поля. Пучок малой интенсивности выполняет функции референтного сигнала. Интенсивный световой луч через согласующий элемент 3 вводится в оптиковолоконный излучатель 4, который в свою очередь направляет лазерный луч в исследуемую область, где формируется зондирующее поле. Световые пучки, рассеянные симметрично и компланарно под углом θ к направлению зондирующего луча, выделяются оптиковолоконными приемными элементами 5-6. По световодам рассеянные пучки попадают в оптический смеситель 7, где пространственно совмещаются с референтным пучком и направляются на фотоприемник 8. Фотоприемник 8 выполняет фотосмешение рассеянных и референтного пучков.
Выделяемые оптиковолоконными оптическими элементами 5-6 рассеянные пучки имеют соответственно частотные сдвиги:
где - доплеровские сдвиги частоты,
- доплеровские сдвиги частоты,  - вектора чувствительности,
- вектора чувствительности,  - волновые вектора выделенных рассеянных пучков,
- волновые вектора выделенных рассеянных пучков,  - волновой вектор зондирующего лазерного пучка.
- волновой вектор зондирующего лазерного пучка.
Фотоприемник 8 осуществляет квадратичное фотосмешение суперпозиции рассеянных и референтного пучков. В результате в фотоэлектрическом сигнале появляются компоненты с комбинационными частотами ω12,ω10,ω20 :
Электрический сигнал с разностной частотой ω12 селектируется полосовым фильтром 9 и представляет собой обычный сигнал инверсно-дифференционной схемы лазерного доплеровского анемометра [4]. Измеритель 11 дает значение этой частоты, которая является известной линейной функцией проекции вектора скорости на направление вектора  , задающего направление координатной оси Oy.
, задающего направление координатной оси Oy.
Суперпозиция электрических сигналов с частотами ω10 (15) и ω20 (16) селектируется полосовым фильтром 10 и поступает на квадратичный преобразователь 13. Выходной сигнал преобразователя содержит компоненты суммарной ωx и разностной ω12 (14) частотами:
ωx= ω10+ω20= 2Ω0-ωDx, (17)
где . Полосовой фильтр 14 выделяет компонент электрического сигнала с суммарной частотой (17), которая измеряется измерителем 12. Как видно из (17), частота ωx является известной линейной функцией проекции вектора скорости
. Полосовой фильтр 14 выделяет компонент электрического сигнала с суммарной частотой (17), которая измеряется измерителем 12. Как видно из (17), частота ωx является известной линейной функцией проекции вектора скорости  на вектор
на вектор  , задающий направление координатной оси Ox. Как и в п. 2, скалярная форма этой зависимости имеет вид, аналогичный выражению (12), в котором 2θ - угол между волновыми векторами
, задающий направление координатной оси Ox. Как и в п. 2, скалярная форма этой зависимости имеет вид, аналогичный выражению (12), в котором 2θ - угол между волновыми векторами  выделенных рассеянных пучков. Отсюда чувствительность этой схемы, как и в п. 2, выше по сравнению с известными. Чувствительность можно повышать путем последовательного применения двух или более квадратичных преобразований с промежуточной полосовой фильтрацией суммарной спектральной боковой компоненты. При этом для суммарной частоты селектированного электрического сдвига получим после n-квадратичных преобразований:
выделенных рассеянных пучков. Отсюда чувствительность этой схемы, как и в п. 2, выше по сравнению с известными. Чувствительность можно повышать путем последовательного применения двух или более квадратичных преобразований с промежуточной полосовой фильтрацией суммарной спектральной боковой компоненты. При этом для суммарной частоты селектированного электрического сдвига получим после n-квадратичных преобразований:
ωxn= 2nΩ0-nωDx= nωx. (18)
При этом, естественно, уменьшается динамический диапазон измерений.
Описанная реализация предлагаемого способа, как и в п. 2, наиболее эффективна в оптиковолоконном использовании.
Таким образом, предложенное техническое решение позволяет измерить ортогональные проекции вектора скорости. Измерение третьей компоненты вектора скорости достигается очевидным образом путем введения дополнительного известного измерительного канала. При этом нет необходимости во взаимной ортогональной ориентации зондирующих лучей.
Источники информации.
1. F. Durst. Principles and practics of Laser Doppler Anemometry, p. 100.
2. Nan-intrusiue measurements of size, velocity and concentration-Dantec //Information, -N04, -February, -1987, p.19-20.
3. Богомолов Н. Ф., Хотяинцев С.Н. Многоканальные волоконно-оптические доплеровские измерители скорости // Изв. ВУЗов, серия "Радиоэлектроника", - 1983, -т.26, -N5, -c.59-63.
4. Дубнищев Ю.Н., Ринкевичюс Б.С. Методы лазерной доплеровской анемометрии. - М.: Наука, 1982.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ЛИНЕЙНЫХ РАЗМЕРОВ И ФОРМЫ МЕТАЛЛУРГИЧЕСКИХ ИЗДЕЛИЙ | 1995 |
|
RU2098755C1 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ И РАЗМЕРОВ ЧАСТИЦ В ПОТОКЕ | 1992 |
|
RU2029307C1 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ И РАЗМЕРОВ ЧАСТИЦ В ПОТОКЕ | 1992 |
|
RU2044267C1 |
| Лазерный анемометр | 1990 |
|
SU1789932A1 |
| СПОСОБ ОПТИЧЕСКОГО ИЗМЕРЕНИЯ ПОПЕРЕЧНОГО РАЗМЕРА МЕТАЛЛУРГИЧЕСКОГО ПРОКАТА | 1995 |
|
RU2104479C1 |
| Лазерный доплеровский измеритель скорости | 1988 |
|
SU1569715A1 |
| УСТРОЙСТВО ОБРАБОТКИ СИГНАЛА ЛАЗЕРНОГО ДОПЛЕРОВСКОГО АНЕМОМЕТРА | 1988 |
|
RU2006867C1 |
| Устройство для измерения скорости и длины объекта | 1988 |
|
SU1610438A1 |
| Лазерный измеритель вектора скорости | 1988 |
|
SU1638625A1 |
| ЛАЗЕРНЫЙ ДОПЛЕРОВСКИЙ ИЗМЕРИТЕЛЬ СКОРОСТИ | 1988 |
|
SU1832942A1 |

Изобретение предназначено для измерения вектора скорости при исследовании многофазных и однофазных сред в экспериментальной гидро- и аэродинамике. В исследуемую область направляют лазерные лучи, формирующие зондирующие поля с заданными векторами чувствительности, выделяют световые пучки, рассеянные в зондирующем поле, выполняют фотоэлектрическое преобразование выделенных пучков, селектируют электрические сигналы с частотами, соответствующие проекциям вектора скорости на заданные вектора чувствительности, измеряют частоты селектированных электрических сигналов и трансформируют измеренные частоты в значения соответствующих компонент вектора скорости посредством известных линейных преобразований, определяемых пространственной конфигурацией векторов чувствительности зондирующих полей, определяют взаимно ортогональные компоненты вектора скорости путем попарного вычитания и суммирования частот электрических сигналов, соответствующих проекциям вектора скорости на вектора чувствительности в выбранной паре, причем модули этих векторов чувствительности задают равными между собой. В дифференциальной конфигурации лазерных лучей измеряют суммарную или разностную частоту компоненты квадратично преобразованного сигнала, соответствующего гетеродинному фотосмешению суперпозиции световых пучков, рассеянных в направлении биссектрисы угла между зондирующими лазерными лучами. В инверсно-дифференциальной конфигурации зондирующих лучей измеряют суммарную или разностную частоту компоненты квадратично преобразованного сигнала, соответствующего гетеродинному фотосмешению световых пучков, рассеянных в направлениях, симметричных относительно измеряемой компоненты вектора скорости и компланарных с ней. 2 з.п. ф-лы, 3 ил.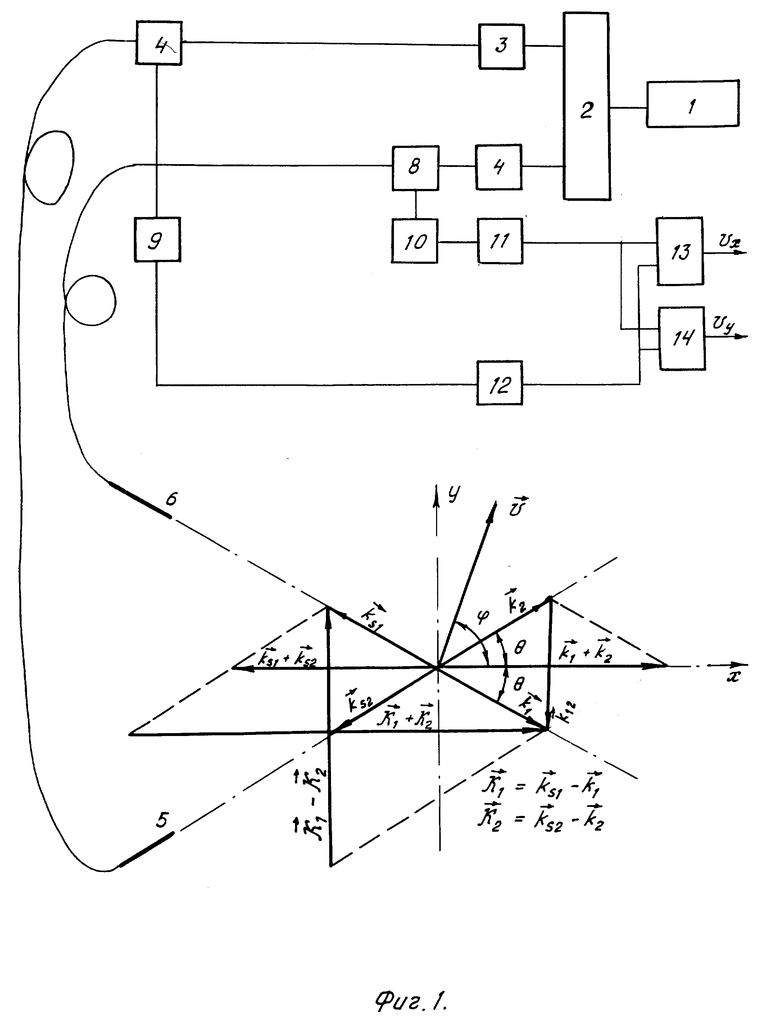
| FR, патент, 2556841, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| SU, авторское свидетельство, 1765768, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| SU, авторское свидетельство, 1795371, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Богомолов Н.Ф | |||
| и др | |||
| Многоканальные волоконно-оптические доплеровские измерители скорости | |||
| Изв.ВУЗов, радиоэлектроника, 1983, т | |||
| Прибор для получения стереоскопических впечатлений от двух изображений различного масштаба | 1917 |
|
SU26A1 |
| Устройство для охлаждения водою паров жидкостей, кипящих выше воды, в применении к разделению смесей жидкостей при перегонке с дефлегматором | 1915 |
|
SU59A1 |
