Изобретение относится к системам человек-машина (СЧМ), в частности к системам управления динамическими объектами, и может быть использовано преимущественно в СЧМ, работающих в экстремальных условиях, например в СЧМ военного назначения.
Эффективность известных систем управления, реализующих заложенные при проектировании функции и алгоритмы управления, во многом зависит от степени готовности операторов к выполнению поставленной перед системой задачи, которая определяется не только уровнем их профессиональной подготовки, но и их функциональным состоянием.
Как показала практика эксплуатации СЧМ различного назначения, одни и те же операторы в различных условиях функционирования обеспечивают далеко не одинаковый уровень выполнения поставленных перед ними задач. Особенно заметно это проявляется в экстремальных условиях эксплуатации (см., например. Эргономика: Учебник/ под ред. Крылова А.А., Суходольского Г.В.- Л.: Изд-во Лен. ун-та, 1988. с. 92-93).
В состав наиболее распространенных систем управления входит оператор (группа операторов), представляющий человеческую компоненту, и одно или несколько технических устройств, представляющих машинную компоненту системы (см. например, Цибулевский И.Е. Человек как звено следящей системы. - М.: Наука, 1981, с.256 - 280).
Рабочее место оператора такой системы составляют блоки визирования, индикации и пульты и органы управления. При этом информация о состоянии объекта управления, предъявляемая оператору, служит ему основанием для выполнения тех или иных порученных ему действий. Результаты воздействия через различные блоки обработки и преобразования информации поступают на исполнительные механизмы, которые реализуют поступившие на них команды в соответствии с назначением и (или) заложенной в них программой. Недостатком существующих систем управления является невозможность обеспечения надежности и эффективности системы в дискомфортных и экстремальных средах из-за различной чувствительности операторов к действию стрессогенных факторов.
Наиболее близким техническим решением к заявляемому является комбинированная система управления, включающая рабочие места операторов (по количеству операторов) с расположенными на них блоками визирования, пультами операторов и приводами блоков визирования и кресел операторов, используемая для повышения эффективности слежения (см. например, схему Г. Тетевосяна для двух операторов, приведенную в кн. Цибулевского И.Е. Человек как звено следящей системы. - М.: Наука, 1981, с. 278 - 280).
Недостатком данной системы управления является невозможность обеспечения надежности и эффективности системы в экстремальных условиях (там же, с.282) из-за различной чувствительности операторов к стрессогенным факторам деятельности и условий внешней среды, что снижает эффективность системы.
Задача изобретения - создание системы управления с динамически модифицируемым контуром управления, повышающим надежность и эффективность системы за счет оперативного перераспределения функций между операторами в зависимости от их функционального состояния в текущий момент времени.
Задача решается тем, что в состав системы управления, содержащей рабочие места операторов с расположенными на них блоками визирования, пультами управления и приводами блоков визирования и кресел операторов, введены блок оценки согласованности действий операторов, блоки тестовых воздействий по числу операторов, блок модификации контура управления, модификаторы, переключатель визира и управляемые муфты, причем первый и второй входы блока оценки согласованности действий операторов соединены соответственно с выходами приводов блоков визирования первого и второго операторов, а выход подключен к входам блоков тестовых воздействий, выходы которых соединены с соответствующими входами блока модификации контура управления, выходы которого, в свою очередь, соединены с управляющими входами модификаторов и входом переключателя визира, вторые входы первого, второго и третьего модификаторов подключены соответственно к выходам пультов управления первого, второго и третьего операторов, первый и второй выходы третьего модификатора соединены соответственно с третьими входами первого и второго модификаторов, выходы которых подключены соответственно к входам приводов блоков визирования первого и второго операторов, выход переключателя визира соединен с первым входом блока визирования третьего оператора, второй и третий входы которого подключены соответственно к выходам приводов блоков визирования первого и второго операторов, а первый и второй выходы четвертого модификатора соединены с управляющими входами первой и второй управляемых муфт, вторые входы которых подключены к выходу пульта управления первого оператора, а выходы соединены соответственно с входами приводов кресел второго и третьего операторов.
Предлагаемое техническое решение соответствует критерию "изобретательский уровень", так как в доступных нам источниках научно-технической и патентной информации не была обнаружена совокупность признаков, позволяющих достичь указанного положительного эффекта - повышение надежности и эффективности системы управления в экстремальных условиях за счет оперативного перераспределения функций между операторами в зависимости от их текущего функционального состояния, т.е. аналогичное решение неизвестно из уровня техники и явным образом из него не следует.
На фиг. 1 изображена структурная схема комбинированной системы управления с динамически модифицирующим контуром; на фиг. 2 - функциональная схема блока оценки согласованности действий операторов; на фиг.3 - функциональная схема блока тестовых воздействий; на фиг.4 - функциональная схема блока модификации контура управления; на фиг. 5 - 8 - функциональные схемы соответственно первого, второго, третьего и четвертого модификаторов.
Комбинированная система управления с динамически модифицируемым контуром управления (фиг. 1) может быть использована при числе операторов более двух и включает рабочие места 1 - 3 операторов (по числу операторов), содержащие соответственно блоки визирования 4 - 6, пульты 7 - 9 управления, приводы 10 и 11 блоков 4 и 5 визирования, переключатель 12 визира* приводы 13 и 14 кресел соответственно второго и третьего операторов, блок 15 оценки согласованности действий операторов, блоки 16 тестовых воздействий (по числу операторов), блок 17 модификации контура управления, модификаторы 18 - 21 и управляемые муфты 22 и 23 соответственно приводов 13 и 14 кресел второго и третьего операторов, причем первый и второй входы блока 15 оценки согласованности действий операторов соединены соответственно с выходами приводов блоков 4 и 5 визирования первого и второго операторов, а выход подключен к входам блоков 16 тестовых воздействий, выходы которых соединены с соответствующими входами блока 17 модификации контура управления, выходы которого, в свою очередь, соединены с управляющими входами модификаторов 18 - 21 и входом переключателя 12 визира, вторые входы первого, второго и третьего модификаторов 18 - 20 подключены к соответствующим выходам пультов 7 - 9 управления первого, второго и третьего операторов, первый и второй выходы третьего модификатора 20 соединены соответственно с третьими входами первого 18 и второго 19 модификаторов, выходы которых подключены соответственно к входам приводов 10 и 11 блоков 4 и 5 визирования первого и второго операторов, выход переключателя 12 визира соединен с первым входом блока 6 визирования третьего оператора, второй и третий входы которого подключены соответственно к выходам приводов 10 и II блоков 4 и 5 визирования первого и второго операторов, а первый и второй выходы четвертого модификатора 21 соединены с управляющими входами первой и второй управляемых муфт 22 и 23, вторые входы которых подключены к выходу пульта 7 управления первого оператора, а выходы соединены соответственно с входами приводов 13 и 14 кресел второго и третьего операторов.
Переключатель 12 визира (фиг. 1) может быть выполнен любым из известных способов, например в виде электронного ключа, подающего по логике блока 17 сигнал, формирующий изображения полей зрения 4 и (или) 5 блоков визирования первого и второго операторов, на блок визирования третьего оператора.
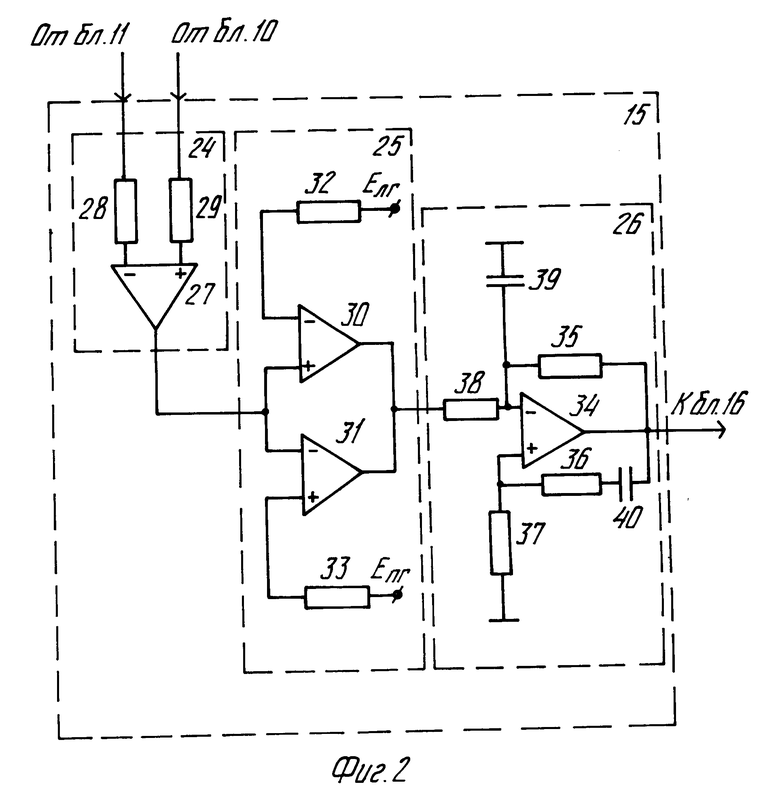
Блок 15 оценки согласованности действий операторов (фиг. 2) содержит схему сравнения 24, выполненную, например, в виде компаратора, содержащего микросхему 27 компаратора (например, 521 CА2) и резисторы 28 и 29 (Шило В.Л. Линейные интегральные схемы.- М.: Советское радио 1979), детектор 25 допусковой зоны, выполненный, например, в виде двух компараторов 30 и 31 и резисторов 32 и 33, на которые подаются напряжения границ Eлг- левой границы, определяющей допустимое смещение линии визирования блока 5 визирования второго оператора влево от центра визирования блока 4 визирования первого оператора, и Eпг- правой границы, определяющей допустимое смещение линии визирования блока 5 визирования второго оператора вправо от центра визирования блока 4 визирования первого оператора (там же с. 229 , рис. 5.8 "a").
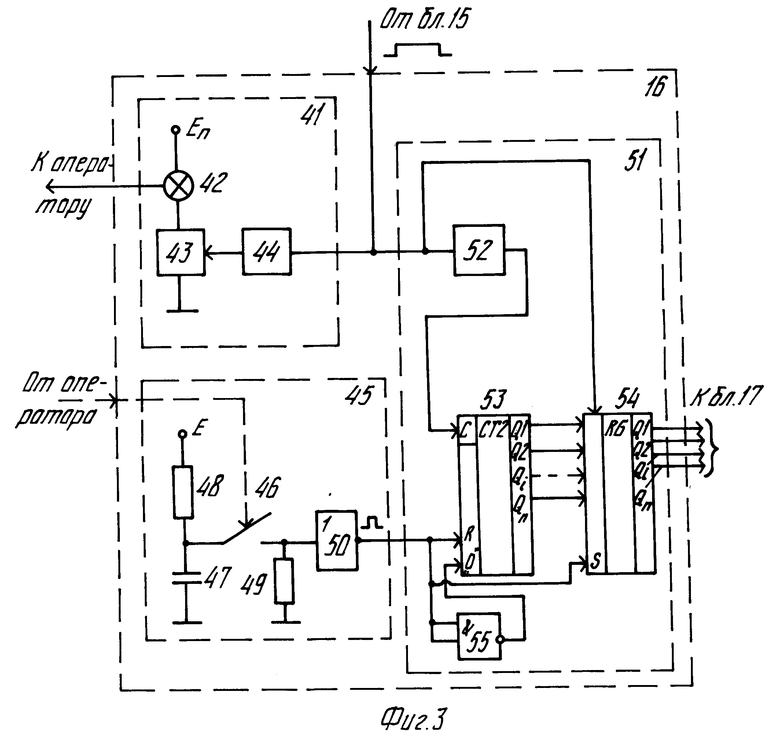
Блок 16 тестовых воздействий (фиг. 3) содержит схему задания стимула 41, содержащую индикатор 42, например электрическую лампочку, электронный ключ 43, например, 590 КН8, одновибратор 44 (Гутников В.С. Интегральная электроника в измерительных устройствах. - Л., Энергоиздат.- с. 158-159); устройство 45 ответа испытуемого, содержащее, например, переключатель 46, конденсатор 47, резисторы 48 и 49, логический элемент НЕ 50 например, из микросхем серии 155, устройство 51 анализа ответов испытуемого, содержащее, например, управляемый генератор 52 импульсов, выполненный, например, в виде мультивибратора (там же с. 154, рис. 5.7 "a"), счетчик 53, выполненный, например, на ИС серии 155, параллельный регистр 54, выполненный, например, на ИС серии 155, логический элемент НЕ 55, выполненный, например, на ИС 155 ЛАЗ.
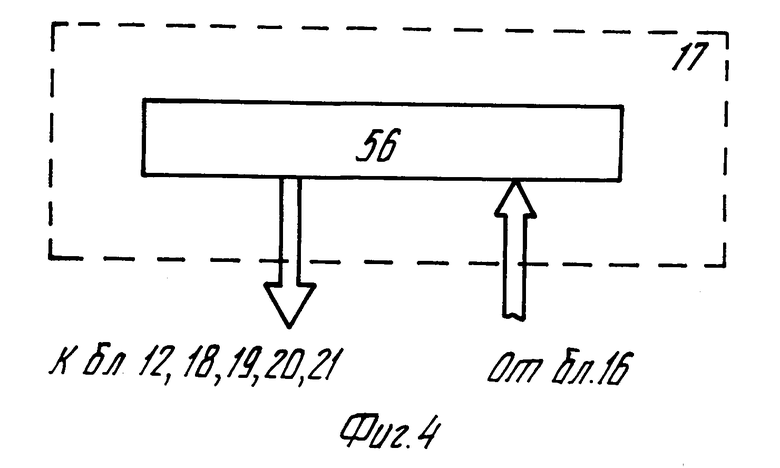
Блок 17 модификации контура управления (фиг.4) содержит микропроцессорную систему управления 56, выполненную например на базе однокристального микроконтроллера КМ1816ВЕ51, (Сташин В. В., Урусов А.В., Мологонцева О.Ф. Проектирование цифровых устройств на однокристальных микроконтроллерах.- М., Энергоиздат, 1990). Выходные порты системы подключены к модификаторам 18 - 21, а входные порты системы соединены с блоками 16 тестовых воздействий. Законы функционирования микропроцессорной системы управления 56 определяются прикладной программой, размещаемой в резидентной памяти программ микроконтроллера.
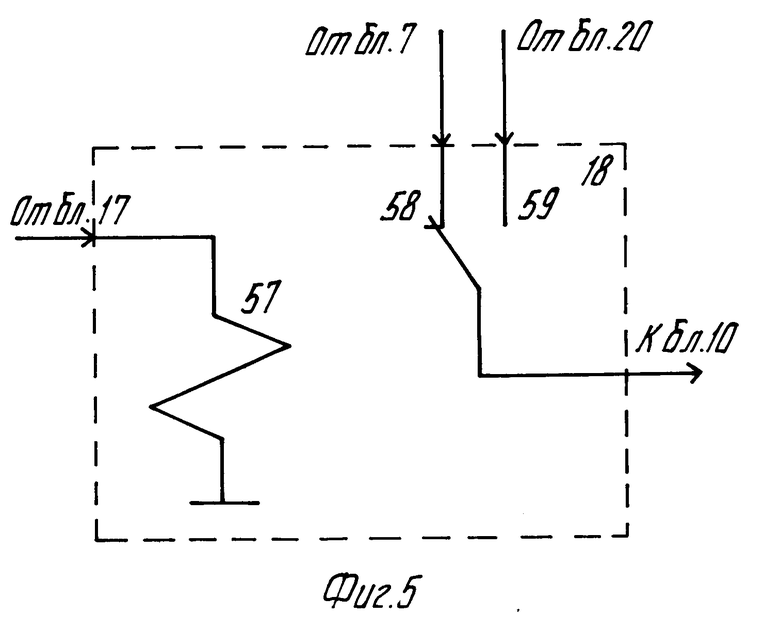
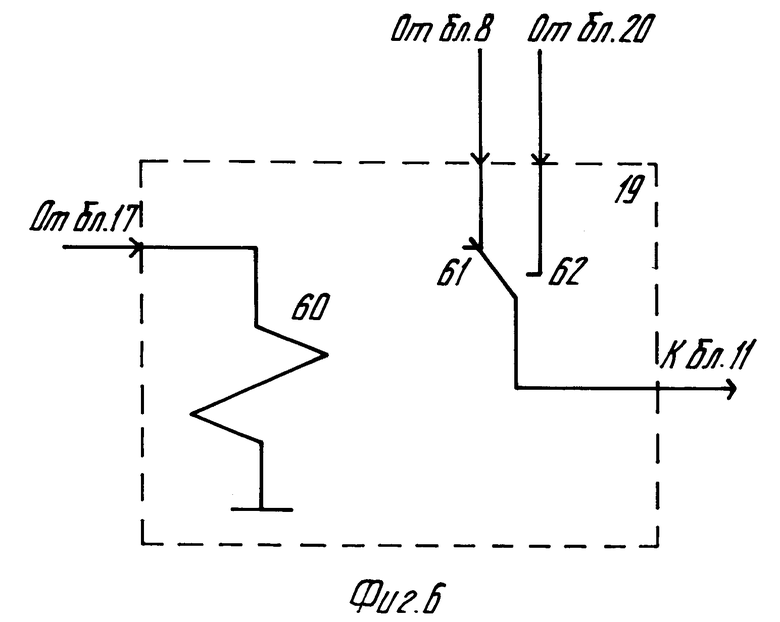
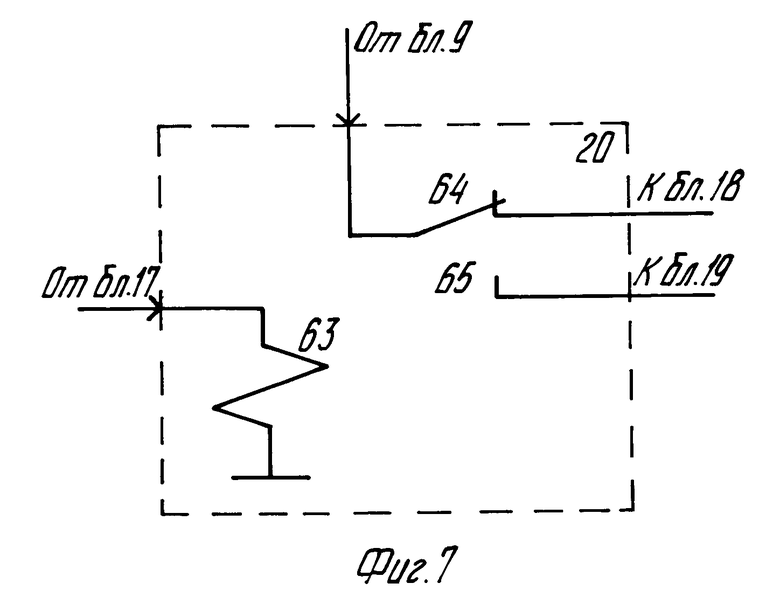
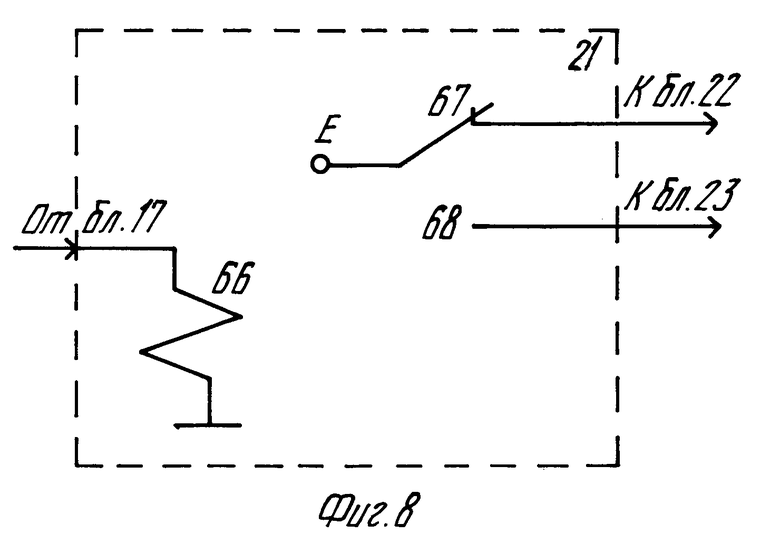
Модификаторы 18 - 21 (фиг.5 - 8 соответственно) могут быть выполнены в виде ключей, например, на базе реле.
Модификатор 18 (фиг. 5) реализован, например, на базе реле, управляющая обмотка 57 которого подключена к блоку 17, а контактная группа с помощью нормально замкнутых контактов 58 и нормально разомкнутых контактов 59 реализует логику, в соответствии с которой происходит передача управления приводом 10 блока 4 визирования первого оператора с пульта 7 управления первого оператора на пульт 9 управления третьего оператора через модификатор 20 (на фиг. 5 не показаны).
Модификатор 19 (фиг.6) реализован, например, на базе реле, управляющая обмотка 60 которого подключена к блоку 17, а контактная группа с помощью нормально замкнутых контактов 61 и нормально разомкнутых контактов 62 реализует логику, в соответствии с которой происходит передача управления приводом 11 блока 5 визирования второго оператора с пульта 8 управления второго оператора на пульт 9 управления третьего оператора через модификатор 20 (на фиг. 6 не показаны).
Модификатор 20 (фиг. 7) реализован, например, на базе реле, управляющая обмотка 63 которого подключена к блоку 17, а контактная группа с помощью нормально замкнутых контактов 64 и нормально разомкнутых контактов 65 реализует логику, в соответствии с которой происходит передача сигнала управления, поступающего с пульта 9 управления третьего оператора, на модификаторы 18 или 19 в соответствии с логикой работы блока 17 модификации контура управления.
Модификатор 21 (фиг. 8) реализован, например, на базе реле, управляющая обмотка 66 которого подключена к блоку 17, а контактная группа с помощью нормально замкнутых контактов 67 и нормально разомкнутых контактов 68 реализует логику, в соответствии с которой происходит подача напряжения, включающего управляемые муфты 22 или 23 в соответствии с логикой работы блока 17 модификации контура управления.
Управляемые муфты 22 и 23 (фиг.1) могут быть выполнены, например, в виде электромагнитных муфт общего применения (см. например, Справочник Машиностроителя в 6 т., т.4, ч.1.- М.: Машиностроение, 1962. с.219).
Комбинированная система управления с динамически модифицируемым контуром управления работает следующим образом.
Операторы 1 и 2 (фиг. 1), получив целеуказание, например, от оператора 3, выполняющего функции командира экипажа, выполняют предписанные им инструкцией действия по сопровождению сложно движущийся цели. При этом оператор 1, например, управляя своим блоком визирования 4, наводит маркер в виде рамки на цель и удерживает ее в рамке как можно ближе к центру поля зрения, т. е. осуществляет операцию синхронизации. Оператору 2, управляющему своим блоком визирования 5, остается навести свою прицельную марку в виде, например, перекрестия практически на неподвижную цель, что обеспечивает высокое качество выполнения совместного слежения. Сигналы о результатах управляющих воздействий операторов 1 и 2 соответственно с пультов 7 и 8 операторов через соответствующие приводы 10 и 11 поступают на блоки визирования 4 и 5 операторов 1 и 2 и отображаются на экранах этих блоков и экране блока 6 визирования оператора 3 (например, командира экипажа), наблюдающего за результатами деятельности операторов 1 и 2 или выполняющего какую-либо другую деятельность, предусмотренную инструкцией. Одновременно эти же сигналы поступают на блок 15 оценки согласованности действий операторов, где производится оценка относительного рассогласования прицельных марок блоков визирования 4 и 5 операторов 1 и 2. В обычном состоянии подготовленные операторы выполняют функции слежения достаточно хорошо и согласованно. В экстремальных условиях операторы, имеющие различную чувствительность к действующим стрессогенным факторам, могут существенно изменить эффективность слежения. В этом случае ошибка рассогласования может превысить определенную допустимую величину и во избежание срыва совместной деятельности блок 15 оценки согласованности действий операторов выдает сигнал на блоки 16 тестовых воздействий всех трех операторов на предъявление им короткой тестовой задачи: например, определить длительность временного интервала, устанавливаемого априорно. Результаты выполнения теста (например, своевременное или несвоевременное нажатие кнопки на звуковой сигнал или загорание лампочек на блоках '16 тестовых воздействий) поступают на блок 17 модификации контура управления, где производится оценка точности выполнения теста. В случае, если переоценка или недооценка времени одним из операторов выше его индивидуальной предельно допустимой (определяется предварительно), устанавливаемой в блоке модификации контура управления, производится перераспределение функций между операторами. Функции любого из операторов (1 или 2) могут быть переданы другому члену экипажа. Возможные варианты:
а) в случае передачи функций оператора 1 оператору 2 система работает следующим образом: на модификатор 21 с блока 17 модификации контура управления поступает команда об отключении привода 13 кресла второго оператора, которая с выхода модификатора 21 поступает на управляющий вход управляемой муфты 22, отключающей привод 13 кресла оператора 2, при этом последний продолжает осуществлять операцию наведения в одиночку, выполняя как свои функции, так и функции оператора 1;
б) в случае передачи функций операторов 1 и 2 командиру экипажа (оператору 3) система работает следующим образом: на модификатор 21 с блока 17 модификации контура управления поступает команда об отключении приводов 13 кресла второго оператора и 14 кресла третьего оператора, которая с выхода модификатора 21 поступает на управляющие входы управляемых муфт 22 и 23. Одновременно через модификатор 19 блокируются сигналы, поступающие с выхода пульта управления 8 второго оператора, взамен их на блок 5 визирования второго оператора начинают поступать сигналы с пульта управления 9 третьего оператора, который в одиночку осуществляет операцию наведения, выполняя функции операторов 1 и 2 одновременно.
в) в случае, если третьему оператору передаются функции оператора 2, через модификатор 19 блокируются сигналы, поступающие с пульта 8 управления второго оператора. Взамен их на блок 5 визирования оператора 2 и блок 15 оценки согласованности действий операторов начинают поступать сигналы с блока 9 управления третьего оператора. При этом командой с модификатора 21 через муфту 22 отключается привод 13 кресла оператора 2, а через муфту 23 подключается привод 14 кресла оператора 3. Переключатель 12 визира при передаче управления третьему оператору обеспечивает соответствие наблюдаемой им марки визира системе, управление которой в данный момент ему поручено.
Таким образом происходит передача функций одного из операторов другому члену экипажа, что позволяет повысить надежность функционирования СЧМ в целом, так как задачу всегда выполняют наиболее стрессоустойчивые (к конкретным стрессогенным факторам) или просто находящиеся в лучшем функциональном состоянии в текущий момент времени операторы. Решить подобную задачу, например, предварительным отбором операторов невозможно из-за многообразия вариантов воздействия и непредсказуемости появления измененного функционального состояния какого-либо оператора в условиях дискомфортных и экстремальных сред.
Блок 15 оценки согласованности действий операторов (фиг.2) работает следующим образом.
В случае, если в процессе работы первого и второго операторов возникает рассогласование между видимыми положениями центра визирования блока 4 визирования первого оператора и линии визирования блока 5 визирования второго оператора вправо или влево от центра и это рассогласование больше допустимого, установленного априорно, что предопределяет возможный срыв выполнения задачи слежения, величина возникающего на выходе схемы сравнения 24 напряжения, пропорционального величине рассогласования, превышает порог левой (Eлг) или правой (Eпг) границ детектора 25 допусковой зоны, который при этом на своем выходе формирует перепад напряжения, запускающий ждущий мультивибратор 26, формирующий на своем выходе импульс напряжения, включающий блок 16 тестовых воздействий.
Блок 16 тестовых воздействий (фиг. 3) работает следующим образом.
При возникновении значимого рассогласования в деятельности первого и второго операторов сигнал с выхода блока 15 оценки согласованности действий операторов своим передним фронтом запускает схему задания стимула 41. При этом одновибратор 44 формирует на своем выходе импульс, который на время действия импульса (ориентировочно 0,2 - 0,4 с) включает индикатор 42. Одновременно запускается управляемый генератор 52 импульсов, сигналы с выхода которого поступают на счетный вход счетчика 53, который начинает счет поступающих импульсов, записывая их величину в параллельный регистр 54. Оператор, наблюдая сигналы индикатора 42, должен по инструкции по прошествии некоторого интервала времени (например, 5 с) нажать кнопку переключателя 46, свидетельствуя, что, по его субъективному отсчету, прошел заданный интервал времени. При этом сигнал с выхода устройства 45 ответа испытуемого поступает на блокирующий вход счетчика 53 и останавливает счет, фиксирует результат отсчета в параллельном регистре 54, а затем через время задержки логического элемента НЕ 55 сбрасывает счетчик в нулевое положение. Информация с выхода параллельного регистра 54 поступает на соответствующий вход блока 17 модификации контура управления. При этом в ней содержатся сведения о моменте нажатия кнопки переключателя 46, указывающие на точность отслеживания испытуемым оператором заданного временного интервала, которая связана с актуальным психофизиологическим состоянием оператора, его изменениями, обусловленными стрессогенными влияниями условий работы (см., например, Гараев Е.М. Исследование оценки времени при различных видах деятельности человека/Ж. Высш. нервн. деят. , 1978. т.23, N 5, с.1077 - 1085; Горбов Д.Ф. О помехоустойчивости оператора// Инженерная психология.- М., 1984, с. 340 - 357; Гребенникова Н.В., Гребенников В.А. Методики исследования запоминания временных интервалов для оценки функционального состояния оператора// Методики анализа и контроля трудовой деятельности и функциональных состояний.- М., Институт психологии РАН, 1992.-с. 150-156). По завершении тестового испытания задним фронтом импульса от блока 15 оценки согласованности действий операторов происходит сброс параллельного регистра 54 в "0" и прекращается работа управляемого генератора 52 импульсов. Схема готова к следующему циклу тестирования.
Блок 17 модификации контура управления (фиг. 4) работает следующим образом.
Поступающая с блоков 16 тестовых воздействий информация распознается программой микропроцессорной системы управления 56, производится сравнение результатов тестов с хранящимися в памяти этой системы эталонными значениями результатов оценки временного интервала, снятыми ранее в оптимальных рабочих условиях для каждого оператора, и в соответствии с этим система выдает модифицирующие контур управления сигналы на модификаторы 18 - 21. При этом выбирается наименее устойчивый оператор, и его функции передаются свободному оператору. Например, функции первого оператора могут быть переданы второму, либо одновременно функции первого и второго операторов могут быть переданы командиру экипажа и т.д. В случае, если функциональное состояние операторов не вышло за пределы нормы, модификация контура управления не производится.
Промышленное применение предлагаемой комбинированной системы управления с динамически модифицируемым контуром позволяет значительно повысить надежность и эффективность СЧМ за счет оперативного перераспределения функций между операторами в зависимости от их текущего функционального состояния.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЗАГОТОВКИ МЕДА В МАЛОДОСТУПНЫХ РЕГИОНАХ | 1994 |
|
RU2086121C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ГАЗОВОЙ СРЕДЫ ПРИ ХРАНЕНИИ ПЛОДООВОЩНОЙ ПРОДУКЦИИ | 1995 |
|
RU2102860C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ДВИЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 1999 |
|
RU2160929C1 |
| СПОСОБ ПОЛУЧЕНИЯ РЕГУЛИРУЕМЫХ ГАЗОВЫХ СМЕСЕЙ С МАЛЫМ СОДЕРЖАНИЕМ КИСЛОРОДА | 1993 |
|
RU2079002C1 |
| КОНТЕЙНЕР ДЛЯ АГРЕССИВНЫХ МАТЕРИАЛОВ | 1993 |
|
RU2039695C1 |
| КОНТЕЙНЕР ДЛЯ АГРЕССИВНЫХ МАТЕРИАЛОВ | 1995 |
|
RU2095301C1 |
| УСТРОЙСТВО СВЧ-НАГРЕВА | 1992 |
|
RU2047283C1 |
| УСТРОЙСТВО ВВОДА-ВЫВОДА ИНФОРМАЦИИ ДЛЯ СИСТЕМЫ ЦИФРОВОГО УПРАВЛЕНИЯ | 1993 |
|
RU2042183C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ИЗМЕНЕНИЯ ПОЛОЖЕНИЯ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2105321C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ДВИЖУЩИХСЯ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2042150C1 |
Изобретение относится к системам человек-машина (СЧМ), в частности к системам управления динамическими объектами, и может быть использовано преимущественно в СЧМ, работающих в экстремальных стрессовых условиях. Цель изобретения - повышение надежности и эффективности СЧМ. Указанная цель достигается за счет того, что в заявляемую систему, содержащую рабочие места операторов с расположенными на них блоками визирования, пультами управления и приводами блоков визирования и кресел операторов, введены блок оценки согласованности действия операторов, блоки тестовых воздействий по числу операторов, блок модификации контура управления, модификаторы, переключатель визира и управляемые муфты. Система предусмативает оперативное перераспределение функций между операторами в зависимости от их текущего функционального состояния. 8 ил.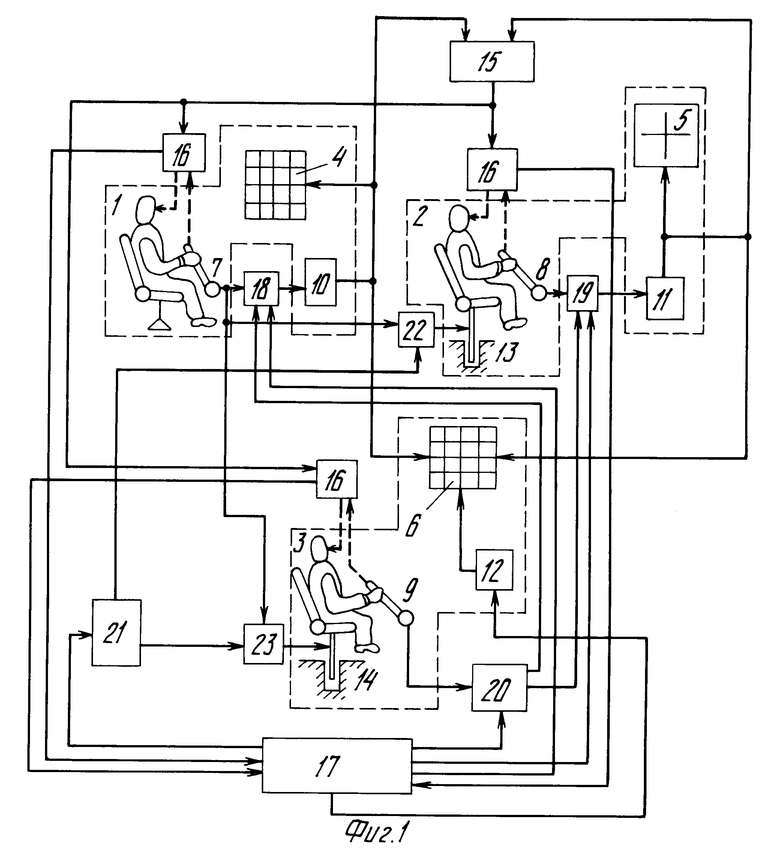
Комбинированная система управления с динамически модифицируемым контуром, содержащая рабочие места операторов с расположенными на них блоками визирования, пультами управления и приводами блоков визирования и кресел операторов, отличающаяся тем, что в нее введены блок оценки согласованности действий операторов, блоки тестовых воздействий по числу операторов, блок модификации контура управления, модификаторы, переключатель визира и управляемые муфты, причем первый и второй входы блока оценки согласованности действий операторов соединены соответственно с выходами приводов блоков визирования первого и второго операторов, а выход подключен к входам блоков тестовых воздействий, выходы которых соединены с соответствующими входами блока модификации контура управления, выходы которого, в свою очередь, соединены с управляющими входами модификаторов и входом переключателя визира, вторые входы первого, второго и третьего модификаторов подключены соответственно к выходам пультов управления первого, второго и третьего операторов, первый и второй выходы третьего модификатора соединены соответственно с третьими входами первого и второго модификаторов, выходы которых подключены соответственно к входам приводов блоков визирования первого и второго операторов, выход переключателя визира соединен с первым входом блока визирования третьего оператора, второй и третий входы которого подключены соответственно к выходам приводов блоков визирования первого и второго операторов, а первый и второй выходы четвертого модификатора соединен с управляющими входами первой и второй управляемых муфт, вторые входы которых подключены к выходу пульта управления первого оператора, а выходы соединены соответственно с входами приводов кресел второго и третьего операторов.
| Цибулевский И.Е | |||
| Человек как звено следящей системы | |||
| - М.: Наука, 1981, с.278-280, рис.53.4 | |||
| Эргономика./Под ред.Крылова А.А., Суходольского Г.В | |||
| - Л.: Изд | |||
| Ленинградского университета, 1988, с.92-93. |
