Изобретение относится к области контроля движения транспортных средств и может быть использовано, в частности, в системах централизованного контроля подвижных единиц маршрутизированного транспорта.
Наиболее близким по техническому решению к предлагаемому устройству является устройство по патенту РФ 2094853 [1], содержащее на маршрутах - маршрутные датчики; на транспортном средстве (ТС) - коммутационный блок, блок проверки старта, блок сравнения номера и приема информации, формирователь сигнала запуска, двухканальный приемопередатчик, блок управления режимом приемопередатчика, цифроаналоговый преобразователь, датчик пройденного пути (ДПП), усилители низкой частоты (УНЧ), микрофон, тангенту, индикатор отклонения от графика, формирователь кода маршрутного датчика, блок кодирования, громкоговоритель кабины водителя, приемник, клавиатуру и громкоговорители салона; на пункте контроля (ПК) - приемопередатчик первого канала, преобразователь последовательного кода в параллельный, блок согласования, блок кодирования, блок обработки информации и приемопередатчик второго канала.
Это устройство позволяет определять и отображать на мнемосхеме маршрутов местоположение ТС, их отклонение от графиков движения, выводить величину этого отклонения на табло водителей и диспетчера, позволяет осуществлять радиосвязь диспетчер - водитель по инициативе любого из них, передавать циркулярные сообщения диспетчера группе водителей ТС, контролировать речевые сообщения водителя в салон ТС, а также формировать и выводить данные графиков исполненного движения.
Недостатками упомянутого устройства являются: отказ приемника или формирователя кода маршрутного датчика приводит к невозможности определения местоположения этого ТС; неэффективное использование речевого канала при контроле сообщений водителей в салон; отсутствие функции автоинформатора.
Изобретение решает задачу повышения информативности и надежности устройства.
Это достигается тем, что в устройство для контроля движения ТС, содержащее маршрутные датчики, соединенные в их зонах действия посредством канала связи с приемником транспортного средства, на транспортном средстве - приемник, выход которого соединен с входом формирователя кода маршрутного датчика, группа выходов которого соединена с первой группой входов блока кодирования, а выход - с входом датчика пройденного пути, группа выходов которого соединена с второй группой входов блока кодирования, третья группа входов которого подключена к группе выходов клавиатуры, формирователь сигнала запуска, выход которого соединен с четвертым входом блока кодирования, цифроаналоговый преобразователь, выход которого подключен к индикатору отклонения от графика, коммутационный блок, блок сравнения номера и приема информации, блок управления режимом приемопередатчика, микрофон, выход которого соединен с шестым входом коммутационного блока, третий и четвертый выходы которого соединены через усилитель низкой частоты кабины с громкоговорителем кабины и через усилитель низкой частоты салона с группой громкоговорителей салона соответственно, выход двухканального приемопередатчика соединен с первым входом коммутационного блока, первый выход которого подключен к первому входу двухканального приемопередатчика, второй и третий входы которого подключены к первому и второму выходам блока управления режимом приемопередатчика соответственно, выход блока кодирования соединен со вторым входом коммутационного блока, третий вход которого соединен со вторым выходом блока управления режимом приемопередатчика, четвертый вход которого объединен с четвертым входом блока кодирования, второй выход коммутационного блока соединен с входом блока проверки старта, первый, второй и третий выходы которого подключены к одноименным входам блока сравнения номера и приема информации, первый выход которого соединен с первым входом блока управления режимом приемопередатчика, второй групповой выход соединен с входами цифроаналогового преобразователя, а третий выход соединен с входом формирователя сигнала запуска, третий вход блока управления режимом приемопередатчика соединен с четвертым выходом блока сравнения номера и приема информации, на пункте контроля - приемопередатчик первого канала, низкочастотный выход (НЧ-выход) которого соединен с первым входом преобразователя последовательного кода в параллельный, группы выходов которого соединены с информационными входами блока обработки информации, группа выходов которого соединена с группой входов блока кодирования, блок согласования, первый и второй выходы которого соединены соответственно со вторым входом преобразователя последовательного кода в параллельный и с первым управляющим входом блока обработки информации, второй управляющий вход которого объединен с управляющим входом блока кодирования, со вторым входом приемопередатчика первого канала и подключен к третьему выходу блока согласования, выход блока кодирования соединен с первым входом приемопередатчика первого канала, приемопередатчик второго канала, дополнительно введены на транспортном средстве пульт водителя, микропроцессорный блок и второй цифроаналоговый преобразователь, а также введены дополнительные функциональные связи коммутационного блока, блока управления режимом приемопередатчика, датчика пройденного пути и блока кодирования, второй - пятый выходы пульта водителя подключены к одноименным входам микропроцессорного блока, шестой вход которого соединен с вторым выходом датчика пройденного пути, а первый, второй и третий выходы подключены к пятому, шестому входам блока кодирования и к входу второго цифроаналогового преобразователя соответственно, выход второго цифроаналогового преобразователя соединен с одиннадцатым входом коммутационного блока, четвертый, пятый, седьмой, восьмой, девятый и десятый входы которого подключены к третьему, четвертому, пятому, шестому, седьмому и восьмому выходам блока управления режимом приемопередатчика соответственно, пятый вход которого объединен с первым входом микропроцессорного блока и подключен к первому выходу пульта водителя, шестой выход которого подключен ко второму входу блока управления режимом приемопередатчика.
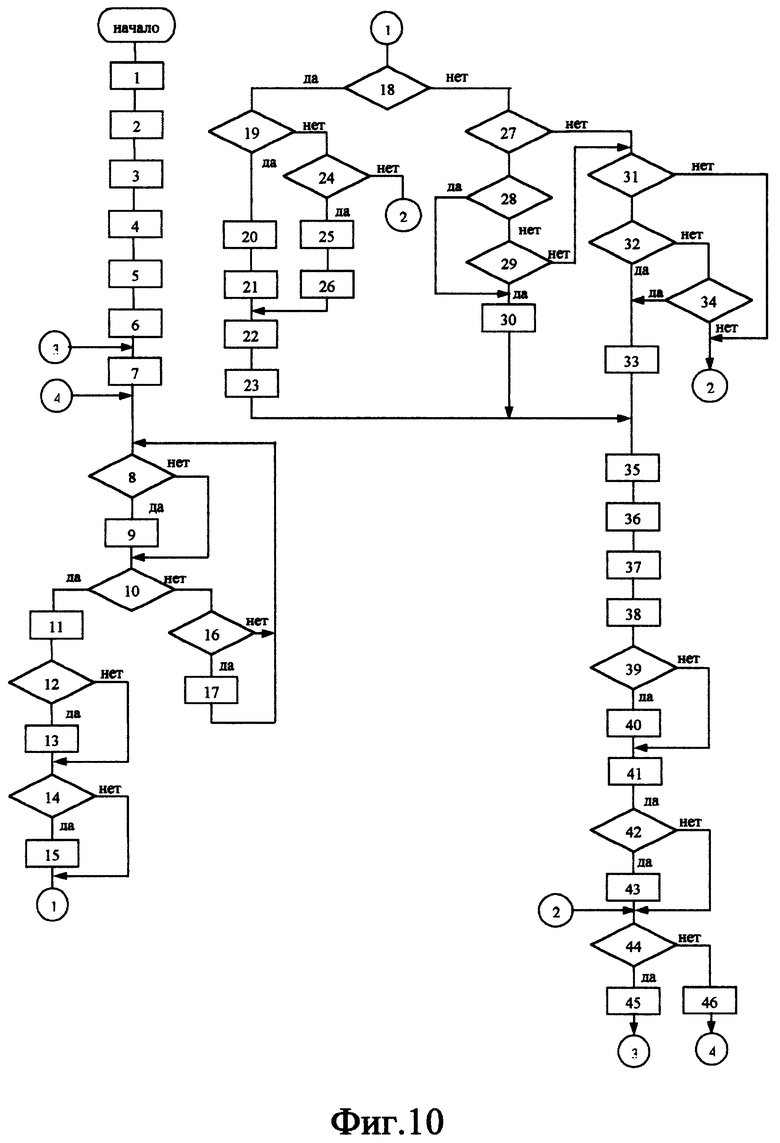
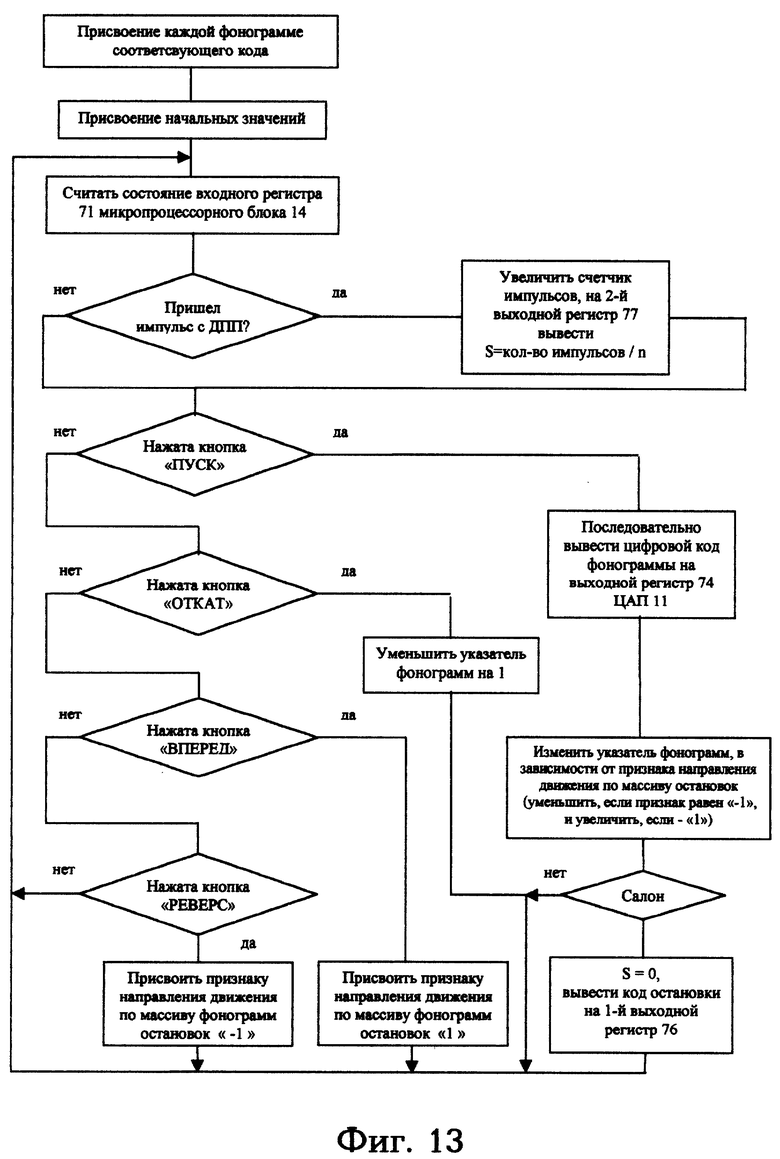
На фиг. 1 приведена блок-схема устройства для контроля движения транспортных средств; на фиг. 2 - функциональная схема блока кодирования ПК; на фиг. 3 - функциональная схема блока проверки старта; на фиг. 4 - функциональная схема блока сравнения номера и приема информации; на фиг. 5 - функциональная схема блока управления режимом приемопередатчика; на фиг. 6 - функциональная схема коммутационного блока; на фиг. 7 - функциональная схема датчика пройденного пути; на фиг. 8 - функциональная схема микропроцессорного блока; на фиг. 9 - функциональная схема пульта водителя; на фиг. 10 - блок-схема алгоритма программы, выполняемой блоком обработки информации; на фиг. 11 - временные диаграммы на выходах блока согласования; на фиг. 12 - структура запросной кодограммы; на фиг. 13 - блок-схема алгоритма программы, выполняемой микропроцессорным блоком.
Устройство для контроля движения транспортных средств содержит маршрутные датчики 1, на транспортном средстве - микрофон 2, коммутационный блок 3, блок 4 проверки старта, блок 5 сравнения номера и приема информации, формирователь 6 сигнала запуска, двухканальный приемопередатчик 7, блок 8 управления режимом приемопередатчика, цифроаналоговый преобразователь (ЦАП) 9, датчик 10 пройденного пути, второй ЦАП 11, индикатор 12 отклонения от графика, блок 13 кодирования, микропроцессорный блок 14, усилители 15.1 и 15.2 низкой частоты, формирователь 16 кода маршрутного датчика, громкоговоритель 17 кабины водителя, громкоговорители 18.1-18.n салона, приемник 19, клавиатуру 20 и пульт 21 водителя; на ПК - приемопередатчик 22 первого канала, преобразователь 23 последовательного кода в параллельный, блок 24 согласования, блок 25 кодирования, блок 26 обработки информации и приемопередатчик 27 второго канала.
Антенна двухканального приемопередатчика ТС через среду распространения радиоволн соединена с антеннами приемопередатчиков первого и второго каналов ПК, а антенна приемника - с передатчиками маршрутных датчиков в их зонах действия. Выход двухканального приемопередатчика соединен с первым входом коммутационного блока, первый выход которого подключен к первому входу двухканального приемопередатчика, второй и третий входы которого подключены к первому и второму выходам блока управления режимом приемопередатчика соответственно, третий, четвертый, пятый, шестой, седьмой и восьмой выходы которого соединены с четвертым, пятым, седьмым, восьмым, девятым и десятым входами коммутационного блока соответственно, к шестому входу которого подключен выход микрофона, второй, третий и одиннадцатый входы коммутационного блока соединены соответственно с выходом блока кодирования ТС, со вторым выходом блока управления режимом приемопередатчика и с выходом второго ЦАП, вход которого соединен с третьим выходом микропроцессорного блока, первый и второй выходы которого соединены соответственно с пятым и шестым входами блока кодирования ТС, первый, второй, третий и четвертый входы которого соединены соответственно с групповым выходом формирователя кода маршрутного датчика, с первым выходом датчика пути, с выходом клавиатуры и с выходом формирователя сигнала запуска, вход которого соединен с третьим выходом блока сравнения номера и приема информации, первый, второй и третий входы которого подключены к одноименным выходам блока проверки старта, вход которого подключен ко второму выходу коммутационного блока, третий и четвертый выходы которого соединены соответственно через УНЧ с громкоговорителем кабины водителя и с громкоговорителями салона ТС, четвертый вход блока управления режимом приемопередатчика подключен к выходу формирователя сигнала запуска, а первый и третий входы соединены с первым и четвертым выходами блока сравнения номера и приема информации соответственно, второй выход которого через цифроаналоговый преобразователь соединен с индикатором отклонения от графика, выход формирователя кода маршрутного датчика соединен с входом датчика пути, а вход - с выходом приемника, пятый вход блока управления режимом приемопередатчика объединен с первым входом микропроцессорного блока и подключен к первому выходу пульта водителя, второй, третий, четвертый и пятый выходы которого подключены к одноименным входам микропроцессорного блока, шестой вход которого соединен со вторым выходом датчика пути, шестой выход пульта водителя соединен со вторым входом блока управления режимом приемопередатчика; на ПК - первый вход приемопередатчика первого канала соединен с выходом блока кодирования ПК, первый вход которого объединен со вторыми входами приемопередатчика первого канала и блока обработки информации и подключен к третьему выходу блока согласования, первый и второй выходы которого соединены соответственно со вторым входом преобразователя последовательного кода в параллельный и с первым входом блока обработки информации, групповой выход которого соединен со вторым входом блока кодирования ПК, а групповые входы подключены к групповым выходам преобразователя последовательного кода в параллельный, первый вход которого соединен с выходом НЧ приемопередатчика первого канала.
Блок 25 кодирования ПК (фиг. 2) состоит из генератора 28 тактовых импульсов, элемента И 29, одновибратора 30, задающего резистора 31, регистра 32 сдвига и модулятора 33.
Блок 4 проверки старта (фиг. 3) содержит генератор 34 импульсов, демодулятор 35, счетчик-делитель 36, триггер 37, счетчик-дешифратор 38 и счетчик 39.
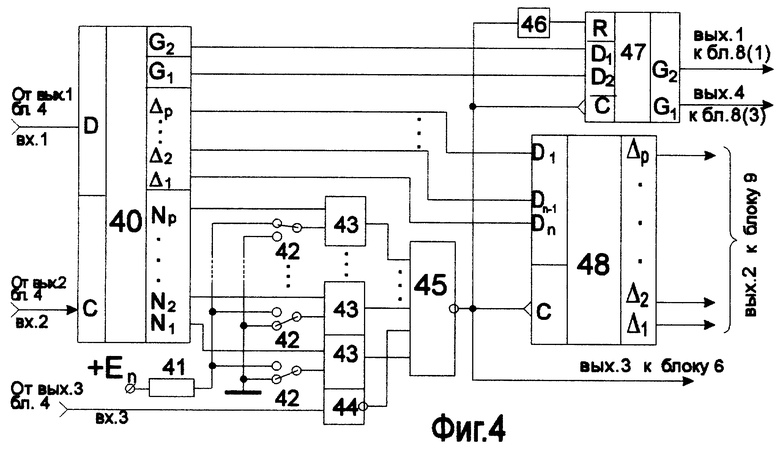
Блок 5 сравнения номера и приема информации (фиг. 4) содержит регистр 40 сдвига, задающий резистор 41, группу переключателей 42, группу элементов ИСКЛЮЧАЮЩЕЕ ИЛИ 43, элемент НЕ 44, элемент ИЛИ-НЕ 45, двухминутное реле 46 времени, двухразрядный D-триггер 47, параллельный регистр 48.
В двухканальном приемопередатчике 7 второй вход предназначен для управления режимом приемопередатчика ("1" - прием, "0" - передача), а третий - для переключения каналов ("0" - первый канал, "1" - второй канал).
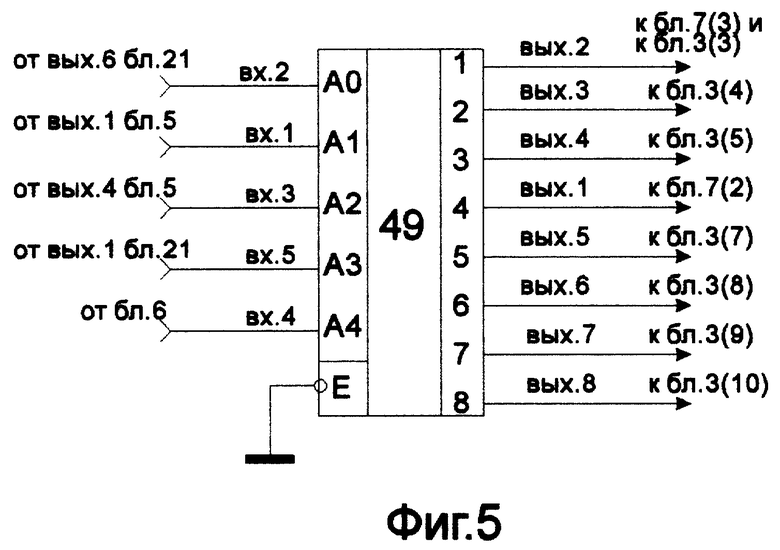
Блок 8 управления режимом приемопередатчика (фиг. 5) представляет собой микросхему постоянной памяти 49, например, К155РЕ3, вариант программы прошивки которой представлен в таблице 1.
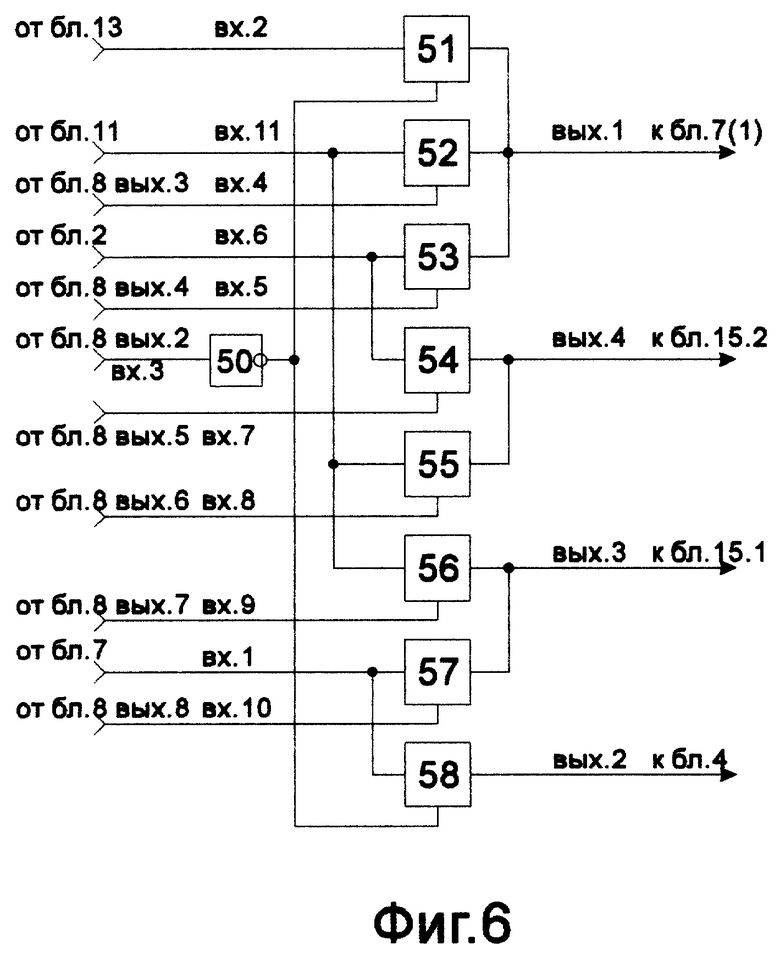
Коммутационный блок 3 (см. фиг. 6) содержит элемент НЕ 50 и ключи 51-58.
Блок 26 обработки информации может быть выполнен, например, на базе персонального IBM-совместимого компьютера.
Датчик 10 пройденного пути (см. фиг. 7) содержит диодный ограничитель 59, триггер Шмитта 60, первичный датчик 61 частоты вращения тягового электродвигателя (ТЭД), одновибратор 62, RS-триггер 63, кварцевый генератор 64, электронный ключ 65, счетчик 66 калиброванного интервала, прибор - указатель скорости 67, счетчик-дешифратор 68 и счетчик 69 пройденного пути.
Блок 13 кодирования по сигналу запуска преобразует параллельный двоичный код, формируемый блоками 10, 14, 16 и 20, в последовательный код, подаваемый на второй вход коммутационного блока 3.
Формирователь 16 кода датчика преобразует в цифровой код частотно-модулированный сигнал i-го маршрутного датчика.
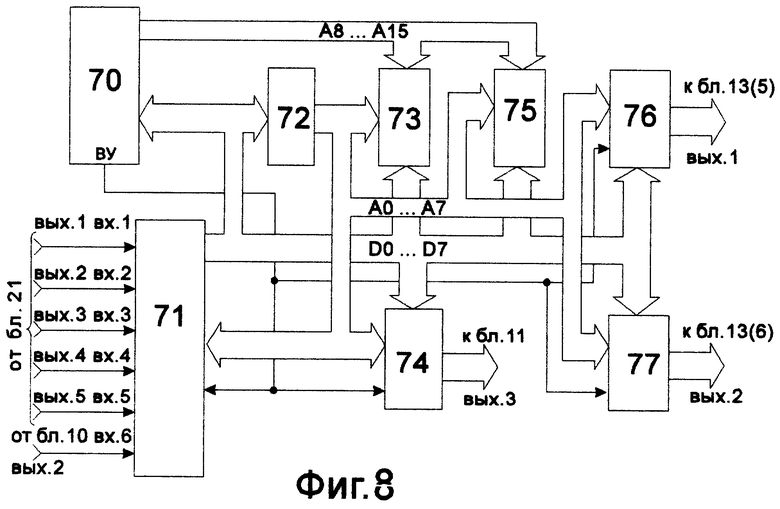
Микропроцессорный блок 14 (фиг. 8) содержит микропроцессор 70, входной регистр 71, регистр 72 адреса, ОЗУ 73, выходной регистр 74 цифроаналогового преобразователя, ПЗУ 75, первый выходной регистр 76 и второй выходной регистр 77. Основными функциями микропроцессорного блока являются формирование кодов последних пройденных остановок (Ri), расстояний пройденных от них (Si), а также фонограмм (в цифровом виде), соответствующих названиям этих остановок. Для этого в ПЗУ 75 предварительно, используя специализированное АРМ, записываются фонограммы названий необходимых остановок и их номера, а также программа функционирования микропроцессорного блока.
Пульт 21 водителя (фиг. 9) содержит тумблер 78, кнопки 79-83, задающие резисторы 84-89 и одновибраторы 90-93 и предназначен для управления процессом объявления названий остановок с помощью автоинформатора.
На блок-схеме алгоритма программы (фиг. 10), выполняемой блоком обработки информации, приняты следующие обозначения блоков:
1. Введение даты и времени.
2. Вызов мнемосхемы маршрута на экран дисплея.
3. Присвоение каждому отрезку маршрута определенной позиции на дисплее вдоль мнемосхемы маршрута П(L).
4. Введение данных:
а) список кодов маршрутных датчиков в порядке от начала маршрута: M1, M2, ..., Mj, ... Mp;
б) удаление маршрутных датчиков от начала маршрута Q1, Q2, ..., Qj, ... Qp;
в) список кодов остановок в порядке от начала маршрута: R1, R2, ..., Rj, ... Rr;
г) удаление остановок от начала маршрута O1, O2, ..., Oj, ... Or;
д) введение графиков-расписаний (функция местоположения транспортных средств от времени в виде таблицы соответствий);
5. Ввод начальных значений:
i = 0; Gi = 00; PWi = 0, где - i =1...n - порядковый номер транспортного средства;
PWi - признак определения абсолютного удаления i-го транспортного средства от начала маршрута (НМ);
Δi- отклонение от графика i-го транспортного средства;
Gi - команда на борт i-го транспортного средства;
6. Ввод начального значения K = 1, где K - номер цикла.
7. i = 1.
8. Проверка B = 1?, где B - значение сигнала с третьего выхода блока 25 согласования.
9. Вывод на выход блока 27 обработки информации (Ni, Δi, Gi); где Ni - номер транспортного средства.
10. Проверка A = 1?, где A - значение сигнала со второго выхода блока 25 согласования.
11. Считывание принятой информации, поступившей на информационные входы блока 27 обработки информации Mik, Lik, Kik, Rik, Sik, где: Mik - код маршрутного датчика; Lik - код перемещения ТС от пройденного последним МД; Kik - код сигнала блока 20; Rik - код остановки; Sik - код смещения ТС от остановки.
12. Mik и Lik удовлетворяют допустимым значениям?
13. PL = 1.
14. Rik и Sik удовлетворяют допустимым значениям?
15. PS = 1.
16. Была ли введена команда с клавиатуры?
17. Выполнение полученной команды.
18. Проверка PWi = 0?
19. Проверка PL = 1?
20. Определение jik для Mik, где j - порядковый номер маршрутного датчика в списке их кодов.
21. Wik = Qj + Lik, где Wik - абсолютное удаление транспортного средства от начала маршрута (НМ) в отрезках (дискретах) маршрута.
22. PWi = 1.
23. Резервирование массива для графика исполненного движения i-го ТС.
24. Проверка PS = 1?
25. Определение rik для Rik, где r - порядковый номер остановки в списке кодов остановок.
26. Wik = Or + Sik.
27. Проверка PL = 1?
28. Достигло ли ТС НМ?
29. Проверка на плавность перемещения ТС.
30. Wik = Qj + Lik.
31. Проверка PS = 1?
32. Достигло ли ТС НМ?
33. Wik = Or + Sik.
34. Проверка на плавность перемещения ТС.
35. Символ ТС--->П(L), соответствующий Wik.
36. Определение по известному местоположению планируемого времени tплан.
37. Определение отклонения от графика: Δi= tплан- tтек.
38. Вывод на дисплей сообщения, соответствующего коду K с символом i-го сообщения ТС.
39. Соответствует ли местоположение i-го ТС расположению какой-либо контрольной точки?
40. tтек занести в массив графика исполненного движения i-го ТС в столбец данной контрольной точки.
41. Mik, Lik, Rik, Sik, tтек ---> ОЗУ.
42. ОЗУ заполнено?
43. ОЗУ ---> ВЗУ.
44. i = n?
45. K = K + 1.
46. i = i + 1.
Устройство для контроля движения транспортных средств работает следующим образом.
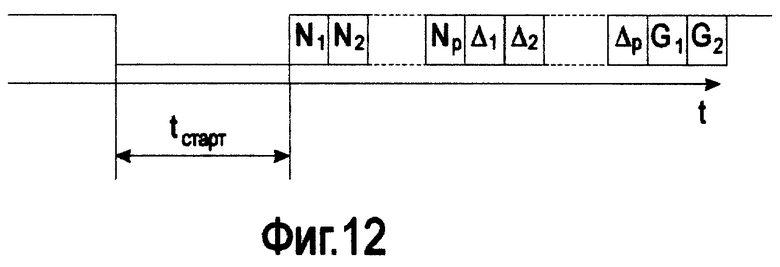
Блок 24 согласования на своих выходах формирует сигналы (фиг. 11), обеспечивающие согласованную во времени работу блоков устройства. По сигналу с третьего выхода блока 24 согласования, поступающему на второй вход блока 26 обработки информации, на групповой выход последнего выводится информация для передачи в эфир, поступающая на группу информационных входов регистра 32 сдвига. По этому же сигналу открывается элемент И 29 для прохождения тактовых импульсов и запускается одновибратор 30, который формирует сигнал параллельной записи информации, поступившей на информационные входы первой группы регистра 32 сдвига. С выхода регистра 32 сдвига информация в последовательном коде (фиг. 12) поступает на вход модулятора 33. С выхода модулятора 33 сигнал поступает на вход приемопередатчика 22 первого канала, чем обеспечивается преобразование логических "0" и "1" в модулированные радиосигналы. Указанные сигналы, принятые двухканальным приемопередатчиком 7, через коммутационный блок 3 поступают на демодулятор 35 и преобразуются в последовательность логических "0" и "1". По приходу стартового импульса (фиг. 12) запросной кодограммы сигнал "0" разрешает работу счетчика-делителя 36. Коэффициент деления n выбирается по условию:
где tстарта - длительность стартового импульса запросной кодограммы;
Tг - период частоты следования импульса с генератора 34 импульсов.
Как только с демодулятора 35 приходит стартовый импульс, удовлетворяющий указанному условию, на выходе счетчика-делителя 36 появляется импульс, переключающий триггер 37 в нулевое состояние, чем разрешается работа счетчика-дешифратора 38 и счетчика 39. Коэффициент деления m1 счетчика-дешифратора 38 выбирается по условию:
где Fг - частота генератора 34;
Fм - скорость передами информации, бит/с.
Счетчик 39 подсчитывает количество бит информации после старта. Счетчик-дешифратор 38 формирует на своих выходах сигналы "1", соответствующие состоянию счетчика. С выхода i1 снимается стробирующий сигнал, попадающий в середину бита. По окончании приема информации на выходе счетчика 39 появляется сигнал i2, обеспечивающий переключение триггера 37 в исходное состояние, т.е. перевод блока 4 проверки старта в исходное состояние.
На блок 5 сравнения номера и приема информации с блока 4 проверки старта поступают следующие сигналы: с входа демодулятора 35 - кодограмма в последовательном коде, стробирующие импульсы - с выхода i1 счетчика-дешифратора 38, сигнал окончания приема информации - с выхода i2 счетчика 39.
С первого выхода блока 4 проверки старта на информационный вход регистра 40 сдвига поступает кодограмма в последовательном двоичном коде. Запись информации в регистр 40 сдвига начинается с первого бита кодограммы, следующего за стартом. Под действием стробирующих импульсов i1, приходящих со второго выхода блока 4 проверки старта, регистр 40 сдвига заполняется данными, передаваемыми с пункта контроля (N, Δ, G). Разряды регистра 40 сдвига, в которые попадает передаваемый номер, соединены каждый с первым входом соответствующего элемента 43 ИСКЛЮЧАЮЩЕЕ ИЛИ, вторые входы которых с помощью переключателя 42 подключены к шинам "0" или к "1" в зависимости от закодированного номера транспортного средства. На выходах всех элементов 43 ИСКЛЮЧАЮЩЕЕ ИЛИ будут "0" только в том случае, если номер в запросной кодограмме совпадает с закодированным номером на транспортном средстве (закодированным с помощью переключателей 42). Тогда сигнал окончания приема информации с третьего выхода блока 4 проверки старта, пройдя через элемент НЕ 44, формирует стробирующий сигнал на выходе элемента ИЛИ-НЕ 45 для записи информации в двухразрядный D-триггер 47, в параллельный регистр 48 с регистра 40 сдвига и для запуска реле 46. Этим же сигналом аппаратура транспортного средства переводится в режим передачи информации. Выходы двухразрядного D-триггера 47, в котором после приема информации будет находиться команда на ТС, подключены к блоку 8 управления режимом приемопередатчика. Выходы параллельного регистра 48 соединены с входами цифроаналогового преобразователя 9.
Перед началом движения ТС по маршруту в прямом направлении водителем посредством кнопки 81 пульта 21 водителя на микропроцессорный блок 14 подается команда "Вперед". Команда "Реверс" подается (кнопка 83 пульта водителя) при движении в обратном направлении. Это обеспечивает необходимое чередование фонограмм с названиями остановок на маршруте при выполнении микропроцессорным блоком функции автоинформатора. Команда "Пуск" подается по прибытию ТС на остановку маршрута для автоматического объявления названия остановки. При этом согласно алгоритму программы микропроцессорного блока (см. фиг. 13) из массива фонограмм выбирается та, которая соответствует указателю фонограмм. Через выходной регистр 74 ЦАП, второй ЦАП 11, коммутационный блок 3 эта фонограмма поступает на УНЧ 15.2 салона (звучание в салоне) в том случае, если тумблер 79 пульта водителя находится в положении "Салон". В противном случае, фонограмма звучит в кабине (коммутационный блок 3 обеспечивает соединение выхода второго ЦАП 11 с УНЧ 15.1 кабины водителя). Кнопка 82 "Откат" предназначена для возврата указателя фонограмм в предыдущую позицию. Импульсы, поступающие со второго выхода датчика 10 пройденного пути (со счетчика 66 калиброванного интервала) подсчитываются в микропроцессорном блоке счетчиком импульсов ДПП. По поступлению очередного импульса счетчик импульсов ДПП увеличивается на единицу, его значение делится на коэффициент, обеспечивающий необходимую дискрету перемещения, и полученный результат (S) выводится на второй выходной регистр 77. При трансляции фонограммы в салон ТС на первый выходной регистр 76 микропроцессорного блока выводится соответствующий ей код и счетчик импульсов ДПП обнуляется.
В процессе движения ТС пересекает зоны действия маршрутных датчиков. При этом приемник 19 принимает радиосигнал от маршрутного датчика, а формирователь 16 кода маршрутного датчика выделяет код и помещает его на свой групповой выход. Этот код сохраняется до пересечения ТС зоны следующего маршрутного датчика. В датчике 10 пройденного пути из сигнала первичного датчика 61 формируются импульсы калиброванного интервала, которые выводятся на его второй выход, и подсчитывается расстояние L, пройденное ТС от последнего маршрутного датчика (код этого расстояния выводится на его первый выход).
Таким образом, в информации, передаваемой с ТС, содержатся: M - код маршрутного датчика; L - код пути, пройденного от этого датчика (состояние счетчика 69 пройденного пути), R - код остановки, S - код пути, пройденного ТС от этой остановки (вычисляется микропроцессорным блоком 14). Эти данные позволяют вычислять местоположение ТС двумя независимыми друг от друга способами, что повышает надежность работы устройства в целом.
При отсутствии команд пункта контроля (G1 = G2 = 0) двухканальный приемопередатчик 7 работает в режиме приема-передачи цифровой информации на первом канале и его первый вход и выход посредством коммутационного блока 3 подключаются к выходу блока 13 кодирования и входу блока 4 проверки старта соответственно, а выход микрофона 2 при нажатой кнопке 79 пульта 21 водителя подключается к входу УНЧ салона 15.2. При отжатой - выход второго ЦАП 11, в зависимости от позиции тумблера 78 пульта водителя, подключается к входу УНЧ 15.2 салона или к входу УНЧ 15.1 кабины водителя.
При получении с пункта контроля команды вызова на телефон (G1 = 0; G2 = 1) блок 8 управления режимом приемопередатчика переключает приемопередатчик 7 на второй канал (прием-передача осуществляется под управлением кнопки 79 пульта 21 водителя). При этом тумблер 78 пульта водителя может находиться в позиции "Салон" либо в позиции "Кабина". В первом случае коммутационный блок 3 обеспечивает подключение выхода второго ЦАП 11 к входу УНЧ 15.2 салона (через открытый электронный ключ 55), а также НЧ-выхода приемопередатчика 7 к УНЧ 15.1 кабины водителя при отжатой кнопке 79 пульта 21 водителя (через открытый ключ 57) и выхода микрофона 2 к первому входу приемопередатчика 7 при нажатой кнопке 79 пульта 21 водителя (через открытый ключ 53). Во втором случае выход второго ЦАП 11 блокируется (ключи 52, 55, 56 заперты). Выход микрофона 2 подключается к первому входу приемопередатчика 7 только при нажатой кнопке 79 пульта 21 водителя. Выход блока 13 кодирования и вход блока 4 проверки старта находятся в отключенном состоянии (ключи 51 и 58 заперты).
Команда циркулярного сообщения (G1 = 1; G2 = 0) воздействует на коммутационный блок 3 и блок 8 управления режимом приемопередатчика так, что приемопередатчик 7 переключается на второй канал, его НЧ-выход подключается к УНЧ кабины водителя, а выход микрофона 2 подключается к УНЧ 15.2 салона ТС только при нажатой кнопке 79 пульта 21 водителя и позиции "Салон" тумблера 78 пульта водителя. Выход второго ЦАП 11 подключается к УНЧ 15.2 салона (через открытый ключ 55) только при позиции "Салон" тумблера 78 пульта водителя. Выход блока 13 кодирования и вход блока 4 проверки старта также находятся в отключенном состоянии.
Команда контроля (G1 = 1; G2 = 1) предназначена для осуществления контроля над тем, как водители объявляют остановки и как функционируют автоинформаторы. Так как в настоящем устройстве предусмотрена передача на ПК кода последней остановки, пройденной ТС (при объявлении остановок с помощью автоинформатора), подобный контроль можно осуществлять по цифровой информации от ТС (не загружая речевой канал устройства). Пользование командой контроля дополнительно может быть оправдано необходимостью более глубокого анализа работоспособности аппаратуры ТС. В этом случае блок 8 управления режимом приемопередатчика переключает приемопередатчик 7 на второй канал и включает его на передачу. При позиции "Салон" тумблера 78 пульта водителя и отжатой кнопке 79 пульта 21 водителя выход второго ЦАП 11 через ключ 52 коммутационного блока 3 подключается к первому входу приемопередатчика 7 и через ключ 55 - к УНЧ 15.2 салона, при нажатой кнопке 79 пульта 21 водителя выход микрофона 2 подключается к первому входу приемопередатчика 7 и к УНЧ 15.2 салона через ключи 53 и 54 соответственно. В режиме "Кабина" вне зависимости от положения кнопки 79 пульта 21 водителя выход второго ЦАП 11 подключается к УНЧ 15.1 кабины водителя.
Обработка поступающей на пункт контроля информации и формирование передаваемой на транспортное средство кодограммы осуществляются в соответствии со схемой алгоритма, представленной на фиг. 10.
После пуска программы блок 26 обработки информации (ПЭВМ) выполняет ряд подготовительных операций (1-7 блоки блок-схемы алгоритма). Затем блоком 8 производится опрос готовности аппаратуры на пункте контроля к режиму запроса i-го транспортного средства. Флаг готовности выставляется блоком 24 согласования на втором выходе. При B = 1 на выход блока 26 обработки информации поступают данные (Ni, Δi, Gi). С выхода блока 25 кодирования на вход приемопередатчика 22 первого канала приходит тональный сигнал частотного (фазового) модулятора. В это время аппаратура транспортного средства, работая в режиме приема информации, определяет сигнал старта и сравнивает номер в запросной кодограмме со своим номером. То транспортное средство, номер которого совпал с номером, посланным пунктом контроля, принимает кодограмму. В информации, принятой на транспортном средстве, содержатся данные об отклонении от графика и команда на ТС.
При работе устройства в первом цикле (K = 1) отклонение и команда будут иметь нулевые значения ( Δi= 0, Gi = 00, i = 1...n). В соответствии с этим стрелка индикатора отклонения от графика установится в нейтральное положение - 0. После приема информации аппаратура i-го транспортного средства переводится в режим передачи данных на пункт контроля. В это время аппаратура на пункте контроля находится в ожидании флага готовности на ввод информации в память ЭВМ. После приема данных от i-го транспортного средства с групповых выходов преобразователя 23 последовательного кода в параллельный принятые коды Mik, Lik, Kik, Rik, Sik поступают в блок 26 обработки информации. Эта информация проходит обработку согласно алгоритму программы, после чего опрашивается следующее транспортное средство. По принятым данным определяется местоположение всех транспортных средств на маршруте. Причем в случае сбоя в приеме кодов Mik, Lik, местоположение ТС вычисляется по кодам Rik, Sik. По местоположению транспортного средств из графиков-расписаний определяется плановое время прибытия в данную точку маршрута (методом интерполяции по заданным контрольным точкам из графиков-расписаний). Затем, если местоположение транспортного средства соответствует расположению контрольной точки на маршруте, то tтек заносится в массив формирования исполнения движения i-го транспортного средства (блоки 39 и 40 схемы алгоритма). По плановому времени и текущему определяется отклонение от графика i-го транспортного средства. В дальнейшем эта информация, поступив на борт транспортного средства, индицируется на индикаторе отклонения от графика.
Для речевой связи диспетчера с водителем на клавиатуре ЭВМ набирается номер транспортного средства с кодом команды вызова на телефон. Согласно алгоритму обработки команды по номеру транспортного средства определяется его номер в цикле (i), а так как подана команда вызова на телефон, Gi присваивается значение вызова (01). Приняв эту информацию, аппаратура i-го транспортного средства срабатывает таким образом, что приемопередатчик 7 переходит на второй канал и включается реле 46 времени на две минуты, выход микрофона 2 подключается к модуляционному входу приемопередатчика 7, выход которого подключается к входу УНЧ кабины водителя. Диспетчер голосом приглашает водителя на сеанс речевой связи. Речевая связь с диспетчером осуществляется через одноканальный приемопередатчик 27 второго канала. После сеанса связи аппаратура ТС до истечения двухминутной задержки, отсчитываемой реле 46, будет находиться на втором канале. Когда инициатором сеанса связи является водитель, он посылает команду вызова на телефон с помощью клавиатуры 20 на транспортном средстве. Эта информация на пункте контроля, будет преобразована в команду диспетчеру на экране дисплея ЭВМ. После чего диспетчер проделывает описанные операции для осуществления речевой связи.
При подаче диспетчером с клавиатуры ЭВМ команды контроля программой осуществляются аналогичные операции, что и при команде вызова, Gi присваивается значение 11. Аппаратура ТС после принятия этой команды функционирует таким образом, что в течение двух минут на пункте контроля будет слышно, как функционирует автоинформатор или водитель голосом объявляет остановки. Эти же сообщения будут слышать и пассажиры в салоне ТС. После двух минут аппаратура ТС переводится в режим приема запроса по первому каналу.
Команда циркулярного сообщения отличается от двух предыдущих тем, что в ней присутствует список номеров транспортных средств, которым необходимо передать какое-либо сообщение. В этом случае Gi присваивается значение 10 для каждого ТС списка. Спустя некоторое время, необходимое для прохождения запросов на все ТС списка, аппаратура последних переключится на второй канал для приема речевых сообщений с пункта контроля. Передача сообщений от водителей в этом случае на пункт контроля невозможна.
Для вывода на печатающее устройство графика исполненного движения i-го транспортного средства с клавиатуры ЭВМ подается соответствующая команда.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ДВИЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2010 |
|
RU2431200C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ДВИЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 1994 |
|
RU2094853C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ДВИЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 1992 |
|
RU2054198C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ДВИЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 1995 |
|
RU2096833C1 |
| Устройство для контроля движения транспортных средств | 1990 |
|
SU1836714A3 |
| СИСТЕМА ДИСПЕТЧЕРСКОГО УПРАВЛЕНИЯ НАЗЕМНЫМ ТРАНСПОРТОМ | 1995 |
|
RU2113014C1 |
| Устройство для контроля движения транспортных средств | 1987 |
|
SU1538178A1 |
| СПОСОБ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ОХРАННОЙ СИСТЕМОЙ АВТОМОБИЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2074826C1 |
| АВТОМАТИЗИРОВАННАЯ ДИСПЕТЧЕРСКАЯ СИСТЕМА КОНТРОЛЯ И УПРАВЛЕНИЯ ДОРОЖНЫМ ТРАНСПОРТОМ | 2005 |
|
RU2300808C2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ СТРЕЛОЧНЫМ ПЕРЕВОДОМ | 1998 |
|
RU2147008C1 |






Изобретение относится к области контроля движения транспортных средств и может быть использовано, в частности, в системах централизованного контроля подвижных единиц маршрутизированного транспорта. Технический результат заключается в повышении информативности и надежности устройства. Устройство для контроля движения транспортных средств содержит маршрутные датчики, а также установленные на транспортном средстве пульт водителя, микропроцессорный блок, коммутационный блок, блок проверки старта, блок сравнения номера и приема информации, формирователь сигнала запуска, двухканальный приемопередатчик с блоком управления его режимом, два цифроаналоговых преобразователя, датчик пройденного пути, индикатор отклонения от графика, блок кодирования, громкоговорители, приемник, клавиатуру, усилители низкой частоты, формирователь кода маршрутного датчика, микрофон. На пункте контроля установлены приемопередатчики первого и второго каналов, преобразователь кода, блок согласования, блок кодирования, блок обработки информации. 13 ил., 1 табл.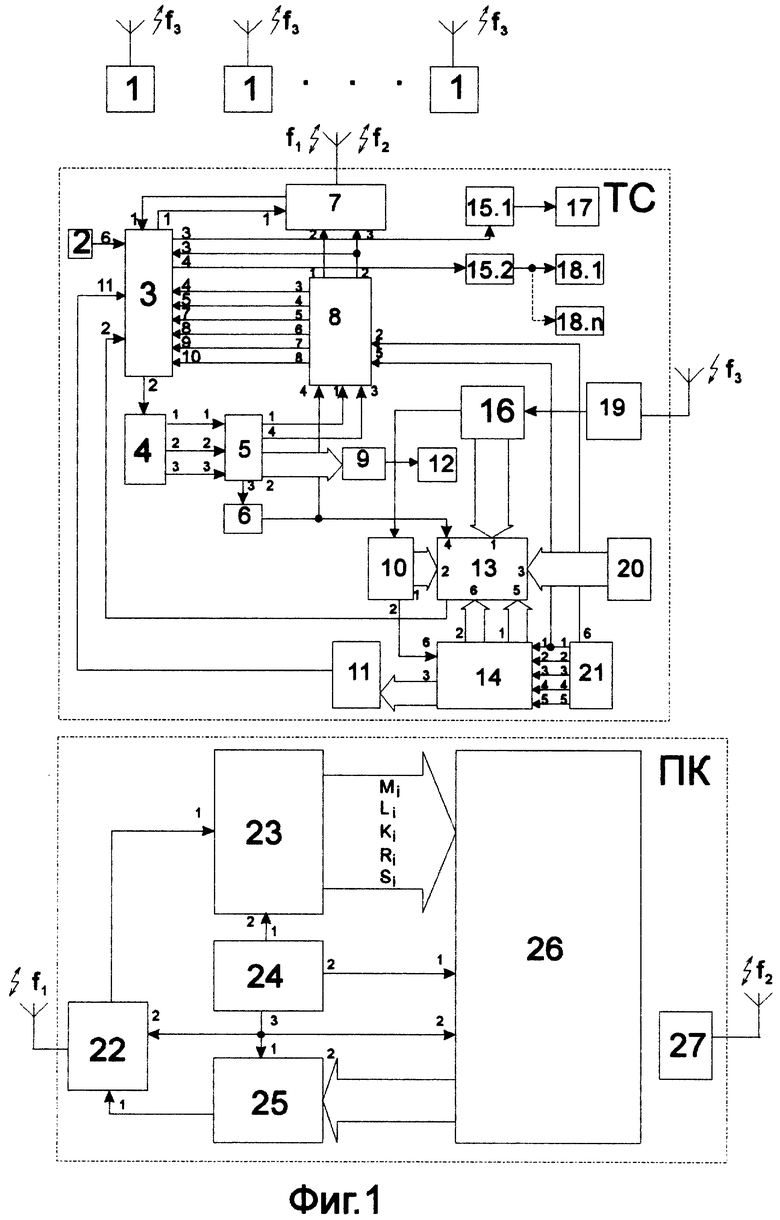
Устройство для контроля движения транспортных средств, содержащее маршрутные датчики, соединенные в их зонах действия посредством канала связи с приемником транспортного средства, на транспортном средстве - приемник, выход которого соединен с входом формирователя кода маршрутного датчика, группа выходов которого соединена с первой группой входов блока кодирования, а выход с входом датчика пройденного пути, группа выходов которого соединена со второй группой входов блока кодирования, третья группа входов которого подключена к группе выходов клавиатуры, формирователь сигнала запуска, выход которого соединен с четвертым входом блока кодирования, цифроаналоговый преобразователь, выход которого подключен к индикатору отклонения от графика, коммутационный блок, блок сравнения номера и приема информации, блок управления режимом приемопередатчика, микрофон, выход которого соединен с шестым входом коммутационного блока, третий и четвертый выходы которого соединены через усилитель низкой частоты кабины с громкоговорителем кабины и через усилитель низкой частоты салона с группой громкоговорителей салона соответственно, НЧ-выход двухканального приемопередатчика соединен с первым входом коммутационного блока, первый выход которого подключен к первому входу двухканального приемопередатчика, второй и третий входы которого подключены к первому и второму выходам блока управления режимом приемопередатчика соответственно, выход блока кодирования соединен со вторым входом коммутационного блока, третий вход которого соединен со вторым выходом блока управления режимом приемопередатчика, четвертый вход которого объединен с четвертым входом блока кодирования, второй выход коммутационного блока соединен с входом блока проверки старта, первый, второй и третий выходы которого подключены к одноименным входам блока сравнения номера и приема информации, первый выход которого соединен с первым входом блока управления режимом приемопередатчика, второй групповой выход соединен с входами цифроаналогового преобразователя, а третий выход соединен с входом формирователя сигнала запуска, третий вход блока управления режимом приемопередатчика соединен с четвертым выходом блока сравнения номера и приема информации, на пункте контроля - приемопередатчик первого канала, НЧ-выход которого соединен с первым входом преобразователя последовательного кода в параллельный, группы выходов которого соединены с информационными входами блока обработки информации, группа выходов которого соединена с группой входов блока кодирования, блок согласования, первый и второй выходы которого соединены соответственно со вторым входом преобразователя последовательного кода в параллельный и с первым управляющим входом блока обработки информации, второй управляющий вход которого объединен с управляющим входом блока кодирования, со вторым входом приемопередатчика первого канала и подключен к третьему выходу блока согласования, выход блока кодирования соединен с первым входом приемопередатчика первого канала, приемопередатчик второго канала, отличающееся тем, что в устройстве на транспортном средстве введены пульт водителя, микропроцессорный блок и второй цифроаналоговый преобразователь, а также введены дополнительные функциональные связи коммутационного блока, блока управления режимом приемопередатчика, датчика пройденного пути и блока кодирования, второй - пятый выходы пульта водителя подключены к одноименным входам микропроцессорного блока, шестой вход которого соединен со вторым выходом датчика пройденного пути, а первый, второй и третий выходы подключены к пятому, шестому входам блока кодирования и к входу второго цифроаналогового преобразователя соответственно, выход второго цифроаналогового преобразователя соединен с одиннадцатым входом коммутационного блока, четвертый, пятый, седьмой, восьмой, девятый и десятый входы которого подключены к третьему, четвертому, пятому, шестому, седьмому и восьмому выходам блока управления режимом приемопередатчика соответственно, пятый вход которого объединен с первым входом микропроцессорного блока и подключен к первому выходу пульта водителя, шестой выход которого соединен со вторым входом блока управления режимом приемопередатчика.
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ДВИЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 1994 |
|
RU2094853C1 |
| Устройство для контроля движения транспортных средств | 1987 |
|
SU1538178A1 |
| СИСТЕМА ДИСПЕТЧЕРСКОГО УПРАВЛЕНИЯ НАЗЕМНЫМ ТРАНСПОРТОМ | 1995 |
|
RU2113014C1 |
| US 4791571 А, 13.12.1988 | |||
| US 5754125 А, 19.05.1998. | |||

