Изобретение относится к электротехнике, в частности к системам управления реверсивными вентильными электроприводами постоянного тока с раздельным управлением групп вентилей преобразователя, и может быть использовано в металлургической, бумагоделательной и других отраслях промышленности.
Известен способ управления реверсивным вентильным электроприводом, осуществляемый при помощи задатчика интенсивности, автоматической системы регулирования скорости электродвигателя постоянного тока и логического переключающего устройства (ЛПУ), согласно которому сигнал задания скорости на входе системы регулирования изменяют с заданным темпом, причем при регулировании потока возбуждения электродвигателя оставался неизменным. Согласно данному способу измеряют также ток в якорной цепи электродвигателя и контролируют полярность сигнала задания тока и, когда изменяется полярность этого сигнала и ток уменьшается до нуля, отсоединяют выход системы импульсно-фазового управления (СИФУ) от управляющих электродов работающей группы вентилей преобразователя и после окончания установленной бестоковой паузы подсоединяют выход СИФУ к управляющим электродам другой группы вентилей [1].
Известен способ управления реверсивным вентильным электроприводом (РВЭ), осуществляемый при помощи задатчика интенсивности, автоматической системы регулирования скорости (АСРС) электродвигателя постоянного тока и ЛПУ, при котором сигнал на входе системы регулирования изменяют с заданным теплом. Согласно этому способу измеряют ток в якорной цепи электродвигателя и контролируют полярность сигнала задания тока и, когда изменяется полярность этого сигнала и ток уменьшается до нуля, отсоединяют выход СИФУ от управляющих электродов работающей группы вентилей преобразователя и после окончания установленной бестоковой паузы подсоединяют выход СИФУ к управляющим электродам другой группы вентилей [2].
В описанных способах управления РЭВ при возникновении перерегулирования в паузах управляющего воздействия, то есть при неизменном задании скорости, к СИФУ подключают группу вентилей преобразователя, осуществляющую торможение привода, что на холостом ходу электропривода приводит к периодическому переключению групп вентилей, то есть к непроизводительным энергетическим затратам.
Наиболее близким к предлагаемому по технической сущности и достигаемому эффекту является рассматриваемый в качестве прототипа способ управления РВЭ, осуществляемый при помощи задатчика интенсивности АСРС электродвигателя постоянного тока ЛПУ и логического блока управления управляемым ключом, подсоединенного параллельно цепи обратной связи регулятора скорости, согласно которому сигнал задания скорости изменяют с заданным темпом, контролируют полярность ошибки регулирования скорости и наличие тока в якорной цепи электродвигателя и при перерегулировании скорости, то есть изменении полярности ошибки регулирования скорости и превышении ее величины заданного порогового значения, блокируют сигнал задания тока, а при уменьшении тока до нуля отключают СИФУ от управляющих электродов группы вентилей преобразователя и по истечении установленной бестоковой паузы СИФУ подключают к другой группе вентилей преобразователя и устраняют блокировку сигнала задания тока [3].
Управление РВЭ по данному способу при неизменном напряжении задания в паузах управляющего воздействия и возникновении перерегулирования скорости означает подключение СИФУ к группе вентилей, осуществляющей торможение электропривода, что на холостом ходу приводит к периодическим переключениям группы вентилей преобразователя, то есть имеют место непроизводительные энергетические потери.
Сущность способа Ровенского для управления РВЭ направлена на снижение непроизводительных энергетических затрат, которые возникают при переключении групп вентилей преобразователя в паузах управляющего воздействия при отсутствии нагрузочного момента электропривода, а также использование момента сопротивления электропривода в качестве тормозного момента электродвигателя при перерегулировании скорости. В результате КПД электропривода повышается.
Данный технический результат достигается тем, что в известном способе управления РВЭ, согласно которому сигнал задания скорости на входе АСРС изменяют с заданным темпом, контролируют полярность ошибки регулирования скорости и наличие тока в якорной цепи электродвигателя и при изменении полярности ошибки регулирования скорости и превышении ее значения величины заданного порогового значения блокируют сигнал задания тока, а при уменьшении тока электродвигателя до нуля отключают СИФУ от управляющих электродов группы вентилей преобразователя и по истечении установленной бестоковой паузы СИФУ подключают к другой группе вентилей преобразователя и устраняют блокировку сигнала задания тока, дополнительно при неизменном напряжении задания на входе системы регулирования блокируют переключение групп вентилей. В результате в паузах управляющего воздействия переключение групп вентилей не происходит, работает только одна группа вентилей и торможение электропривода до заданного значения скорости происходит на выбеге за счет момента сопротивления электропривода.
Чтобы реализовать данный технический результат на практике в известное устройство для управления РВЭ, содержащее последовательно соединенные задатчик интенсивности, регулятор скорости, регулятор тока и СИФУ, выход которой подключен через первый и второй управляемые ключи соответственно к управляющим электродам групп вентилей "вперед" и "назад" преобразователя, датчики скорости и тока, подсоединенные к входам соответствующих регуляторов, третий управляемый ключ, подключенный параллельно цепи обратной связи регулятора скорости, дополнительный узел сравнения заданного и текущего значений скорости электродвигателя и логическое переключающее устройство, первый вход которого связан с выходом датчика тока, а выходы с соответствующими входами логического блока управления, третьим управляемым ключом и управляющими электродами первого и второго ключей, а третий вход блока логического управления связан с выходом дополнительного узла сравнения, причем задатчик интенсивности состоит из последовательно соединенных узла сравнения, релейного элемента с зоной нечувствительности и интегратора, выход которого подключен к входам узла сравнения и регулятора скорости, дополнительно введены нуль органы и четвертый управляемый ключ, который коммутирует второй вход ЛПУ с выходом дополнительного узла сравнения, а управляющий электрод этого ключа связан с выходом нуль органа, чей вход подсоединен к выходу релейного элемента с зоной нечувствительности. Таким образом, когда на входе АСРС сигнал задания не изменяется и на входе релейного элемента задатчика интенсивности сигнал равен логическому нулю, на выходе нуль органа и, соответственно, на управляющем электроде четвертого ключа сигнал также отсутствует и ключ остается разомкнутым, то есть разрывает цепь подачи сигналов на вход ЛПУ. При отсутствии сигнала на управляющем входе ЛПУ на его выходе состояние не изменяется [4, 5], а следовательно, электропривод в таком режиме работает как нереверсивный. СИФУ постоянно подсоединена к управляющим электродам одной группы вентилей и электропривод при перерегулировании тормозится до заданного значения скорости на выбеге за счет момента сопротивления электропривода.
Изобретение поясняется чертежом.
Устройство для осуществления способа Ровенского для управления реверсиным вентильным электроприводом содержит последовательно включенные задатчик интенсивности 1, узел 3 сравнения, регулятор 3 скорости, узел 4 сравнения, регулятор 5 тока, систему 6 импульсно-фазового управления, выход которой через управляемый ключ 7 соединен с управляющими электродами группы вентилей 8 "вперед", а через управляемый ключ 9 - с управляющими электродам и группы вентилей 10 "назад" реверсивного вентильного преобразователя 11. Устройство содержит также датчики 12 тока и 13 скорости электродвигателя 14 постоянного тока, подключенные к входам узлов 2 и 4 сравнения, управляемый ключ 15, подсоединенный параллельно цепи обратной связи регулятора 3 скорости, и логическое переключающее устройство 16, первый вход которого связан с выходом датчика 12 тока, а второй вход - через четвертый управляемый ключ 17 с выходом дополнительного узла 18 сравнения заданного и текущего значения скорости. Выход ЛПУ 16 связаны с соответствующими входами логического блока управления 19 и управляющими электродами первого 7 и второго 9 управляемых ключей. Третий вход блока 19 соединен с выходом узла 18 сравнения, а управляющий электрод ключа 15 подсоединен к выходу блока 19. Задатчик 1 интенсивности состоит из последовательно соединенных узла 20 сравнения, релейного элемента 21 с зоной нечувствительности и интегратора 22, выход которого подключен к входам узлов 2, 18, 20 сравнения, выход релейного элемента 21 соединен через нуль орган 23 с управляющим электродом четвертого управляемого ключа 17.
Способ Ровенского для управления реверсивным вентильным электроприводом осуществляется при помощи задатчика 1 интенсивности, системы подчиненного регулирования скорости электродвигателя 14, ЛПУ 16, логического блока управления 19 ключом 15, нуль органа 23 и управляемого ключа 17. Согласно данному способу сигнал задания скорости на входе узлов 2, 18 сравнения формируется задатчиком интенсивности 1 и изменяется с заданным темпом, например, по трапецеидальной диаграмме. Так, в общепромышленных механизмах пауза в управлении РВЭ, когда управляющее воздействие остается неизменным, а нагрузка на валу электродвигателя отсутствует, составляет от 10 до 50% времени фактической работы электропривода.
Рассмотрим типовой режим работы РВЭ при увеличении управляющего воздействия до заданной величины с последующей паузой в управлении на холостом ходу электропривода. Когда сигнал задания скорости увеличивается с постоянным темпом, электродвигатель 14 разгоняется под действием постоянного динамического, а ток в якорной цепи электродвигателя 14 контролируется ЛПУ 16 при помощи датчика 12 тока. В этом режиме ЛПУ 16 сохраняет свое состояние неизменным. АСРС отрабатывает управляющее воздействие, а выход СИФУ подключен к группе вентилей 8 "вперед" преобразователя 11. То есть функционирование АСРС электродвигателя постоянного тока 14 в этом режиме ничем ни отличается от известной классической двухконтурной системы подчиненного регулирования скорости.
В момент времени, когда сигнал задания скорости достигает заданного значения и перестает изменяться, одновременно осуществляется операция блокирования переключения групп вентилей преобразователя при помощи нуль органа 23 и управляемого ключа 17, который размыкает цепь подачи сигнала на вход 2 ЛПУ 16. Так как известные традиционные ЛПУ (4, 5) содержат элементы памяти (триггеры), то при снятии сигнала с управляющего входа ЛПУ 16 сохраняет свое состояние и сигналы на его выходе не изменяются, а следовательно, переключение групп вентилей 8, 10 таким образом блокируется. Благодаря предлагаемой новой операции блокирования переключения групп вентилей электропривод при неизменном задании работает как нереверсивный. В соответствии с известным способом [3] и согласно предлагаемому при возникновении перерегулирования скорости при помощи логического блока 19 управления осуществляется блокирование сигнала задания тока. Так как состояние ЛПУ 16 не изменяется, пока электродвигатель 14 тормозится на выбеге до заданного значения скорости, состояние логического блока 19 управления также не изменяется. Вследствие этого напряжение на выходе регулятора 3, 5 в этом режиме соответствует текущему значению скорости электродвигателя 14. При достижении скоростью электродвигателя 14 заданного значения блокирование сигнала задания тока прекращают и электропривод переходит в режим установившегося холостого хода без переключения групп вентилей 8, 10 преобразователя 11.
После окончания паузы управляющего воздействия блокирование переключения групп вентилей прекращают, то есть при помощи нуль органа 23 и ключа 17 восстанавливают цепь подачи сигнала с выхода дополнительного узла 18 сравнения на второй вход ЛПУ 16 и сигналы на его выходе устанавливаются в соответствии с соотношением входных управляющих сигналов. Так, когда управляющее воздействие уменьшается и ток электродвигателя 14 снижается до нуля, при помощи ЛПУ 16 СИФУ 6 отключают от управляющих электродов работающей группы 8 вентилей и по истечении установленной бестоковой паузы СИФУ 6 подключают к другой группе вентилей 10 преобразователя 11, а также при помощи логического блока 19 управления ключом 15 устраняют блокировку сигнала задания тока. То есть АСРС электродвигателя 14 постоянного тока при изменении управляющего воздействия с постоянным темпом функционирует в соответствии с известным классическим принципом [1, 2].
Устройство для осуществления способа Ровенского для управления реверсивным вентильным электроприводом работает следующим образом. Рассмотрим, например, типовой режим работы РВЭ при изменении управляющего воздействия по трапецеидальной диаграмме на холостом ходу электропривода. Так, когда сигнал задания скорости на входе задатчика 1 интенсивности увеличивается, на выходе узла 20 сравнения появляется сигнал ошибки регулирования, который значительно превышает зону нечувствительности релейного элемента 21 и приводит к его срабатыванию. В результате сигнал логической единицы с выхода элемента 21 поступает на вход интегратора 22 и на его выходе сигнал увеличивается с постоянным темпом, определяемым постоянной интегрирования блока 22. Нуль орган 23 имеет такую же зону нечувствительности, как у релейного элемента 21, а следовательно, при изменении сигнала задания скорости на выходе задатчика интенсивности 1 на выходах релейного элемента 21, нуль органа 23 и на управляющем электроде ключа 17 сигнал равен логической единицы, а ключ 17 замкнут и соединяет выход узла 18 сравнения с вторым входом ЛПУ 16. Когда же сигнал задания скорости не изменяется, то есть сигнал ошибки регулирования на выходе узла 20 равен нулю, то сигналы на выходе элемента 21 нуль органа 23 тоже равны нулю, а ключ 17, управляющий электрод которого связан с выходом нуль органа 23, находится в разомкнутом состоянии.
Итак, при увеличении сигнала задания скорости на входе узлов 2, 18 сравнения с постоянным темпом на выходе этих узлов сигналы имеют постоянное значение, регуляторы 3 и 5 скорости и тока соответственно отрабатывают управляющее воздействие и скорость электродвигателя 14 изменяется с таким же темпом, так как ток электродвигателя имеет постоянное заданное значение. С выхода датчика 12 тока сигнал, пропорциональный току электродвигателя 14, поступает на вычитающий вход узла 4 сравнения и на первый вход ЛПУ 16, на второй вход которого поступает положительный сигнал ошибки регулирования скорости. Вследствие такого соотношения входных сигналов ЛПУ 16 на первом его выходе сигнал равен логической единице, а на втором - логическому нулю U16(1)="I", U16(2)="O", что соответствует соотношению сигналов на управляющих электродах ключей 7, 9. Следовательно, ключ 7 замкнут, а ключ 9 разомкнут и группа 8 "вперед" подключена к выходу СИФУ 6.
С выхода ЛПУ 16 сигналы поступают также на первый и второй входы логического блока 19 управления, на третий вход которого подается сигнал с выхода узла 18 сравнения. При положительной ошибке регулирования скорости и задании на включение группы 8 "вперед" (U16(1)="I", U16(2)="O') на выходе логического блока 19 управления сигнал равен логическому нулю и ключ 15 находится в разомкнутом состоянии, АСРС имеет традиционную классическую двухконтурную структуру подчиненного регулирования скорости электродвигателя 14.
В момент времени, когда сигнал задания скорости на выходе задатчика 1 увеличивается до заданного значения, он перестает изменяться и, как указывалось ранее, ключ 17 срабатывает и размыкает цепь подачи сигнала на второй вход ЛПУ 16. Используемое в данном устройстве ЛПУ 16, реализующее трехпозиционную логику работы, а также известные ЛПУ [4, 5] имеют в своем составе элементы памяти (триггера), а следовательно, при снятии сигналов с управляющего входа 2 ЛПУ 16 оно сохраняет свое состояние и соотношение сигналов на выходе не изменяется. В результате вышеизложенного можно констатировать, что в паузах управляющего воздействия РВЭ работает как нереверсивный, ведь переключение групп вентилей блокируется.
В известных АСРС [1-3] в конце разгона имеет место перерегулирование скорости, то есть на выходе узлов 2, 18 сравнения появляется отрицательная ошибка регулирования, и состояние логического блока 19 управления при задании на включение группы вентилей 8 "вперед" (U16(1)="I", U16(2)="O") вследствие этого изменяется, то есть на его выходе и на управляющем электроде ключа 15 сигнал равен логичесrой единице, ключ замкнут и таким образом блокирует сигнал задания тока. Ток электродвигателя 14 уменьшается до нуля, и электродвигатель тормозится под действием момента сопротивления электропривода на выбеге, а состояние регуляторов 3, 5 в этом режиме соответствует текущему значению скорости электродвигателя 14.
Когда скорость электродвигателя 14 уменьшается до заданного значения, ошибка регулирования уменьшается до нуля, логический блок 19 управления срабатывает и размыкает ключ 15, и электропривод переходит в режим установившегося холостого хода без переключения групп вентилей преобразователя 11.
Следуя заданной диаграмме управляющего воздействия, в дальнейшем сигнал задания скорости на входах узлов 2, 18 сравнения начинает уменьшаться с заданным темпом, срабатывает нуль орган 23, ключ 17 замыкается, и блокирование переключения групп вентилей прекращают, так как выход 2 ЛПУ 16 соединяется с выходом узла 18 сравнения заданного и текущего значения скорости. РВЭ в этом режиме работает так же, как известное устройство [3]. Так, когда изменяется полярность ошибки регулирования скорости на выходе узлов 2, 18 сравнения и ток электродвигателя 14 уменьшается до нуля, ЛПУ 16 изменяет свое состояние (U16(1)= "O", U16(2)="O") и отключает СИФУ 6 от управляющих электродов работающей группы вентилей 8 на время установленной бестоковой паузы, а после ее окончания на втором выходе ЛПУ 16 и на управляющем электроде ключа 9 появляется сигнал логической единицы и ключ 9 подсоединяет выход СИФУ 6 к управляющим электродам группы вентилей 10 "назад" преобразователя 11. Соотношение выходных сигналов ЛПУ 16 (U16(1)="O", U16(2)="I") и отрицательной ошибки регулирования скорости на выходе узлов 2, 18 определяет состояние логического блока 19 управления, на выходе которого в этом режиме и на управляющем электроде ключа 15 сигнал равен логическому нулю, ключ разомкнут, и блокирование сигнала задания тока устраняется, то есть предложенное устройство в режиме торможения работает аналогично известной традиционной системе подчиненного регулирования скорости [1, 2].
Источники информации
1. Гарнов В. К. и др. Унифицированные системы автоуправления электроприводом в металлургии.- М.: Металлургия, 1977, с. 128, с. 132-134.
2. Шипилло В.П. Автоматизированный вентильный электропривод.- М.: Энергия, 1969, с. 120-122.
3. Авторское свидетельство N 1354377, кл. 5 H 02 P -5/06. Земляков В.Д., Ровенский А.Г., Сивонолов Ю.И., Малохатко В.И. "Способ раздельного управления реверсивным вентильным электроприводом и устройство для его осуществления".
4. Данюшевская Е.Ю. Тиристорные реверсивные электроприводы постоянного тока.- М.: Энергия, 1979, с. 57-65.
5. Барский В.А. Раздельное управление реверсивными тиристорными преобразователями. -М.: Энергия, 1973, с. 17.
Использование: в специальных и общепромышленных электроприводах. Сущность изобретения: согласно данному способу сигнал задания на входе системы регулирования изменяют с заданным темпом, контролируют полярность ошибки регулирования скорости и наличие тока в якорной цепи электродвигателя и при изменении полярности ошибки регулирования скорости и превышении ее величины заданного порогового значения блокируют сигнал задания тока, когда ток электродвигателя уменьшается до нуля, отключают систему импульсно-фазового управления от управляющих электродов работающей группы вентилей преобразователя и по истечении установленной бестоковой паузы систему импульсно-фазового управления подключают к другой группе вентилей преобразователя и устраняют блокирование сигнала задания тока, в паузах управляющего воздействия блокируют переключение групп вентилей преобразователя. Изобретение решает задачу снижения непроизводительных энергетических затрат при переключении групп вентилей преобразователя в паузах управляющего воздействия на холостом ходу электропривода. В результате КПД электропривода повышается. 1 ил.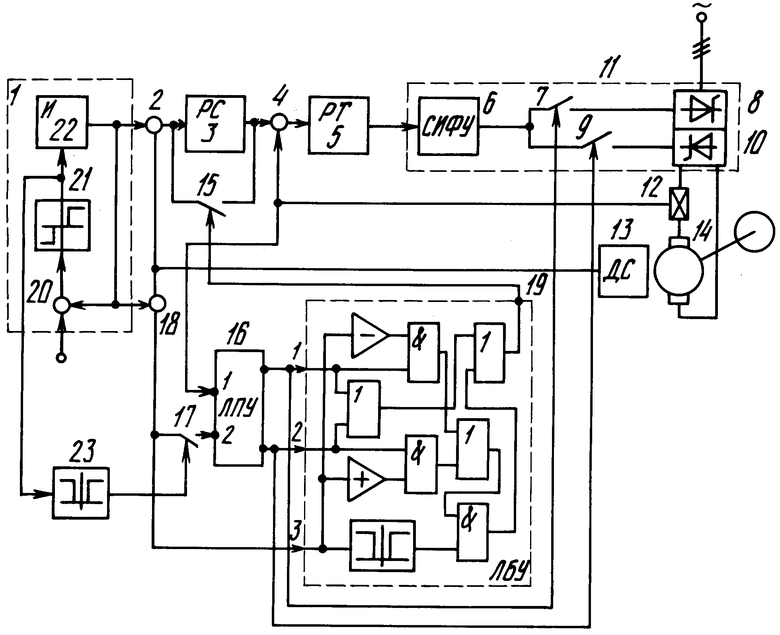
Способ управления реверсивным вентильным электроприводом, согласно которому сигнал задания скорости на входе системы регулирования изменяют с заданным темпом, контролируют полярность ошибки регулирования скорости и наличие тока в якорной цепи электродвигателя и при изменении полярности ошибки регулирования скорости и превышении ее величины заданного порогового значения блокируют сигнал задания тока, а когда ток электродвигателя уменьшается до нуля, отключают систему импульсно-фазового управления от управляющих электродов работающей группы вентилей преобразователя и по истечении установленной бестоковой паузы систему импульсно-фазового управления подключают к другой группе вентилей преобразователя и устраняют блокирование сигнала задания тока, отличающийся тем, что при неизменном задании на входе системы регулирования блокируют переключение групп вентилей.
| Гарнов В.К | |||
| и др | |||
| Унифицированные системы автоуправления электроприводом в металлургии | |||
| - М.: Металлургия, 1977, с.128, 132-134 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Шипилло В.П | |||
| Автоматизированный вентильный электропривод | |||
| - М.: Энергия, 1969, с | |||
| Кровля из глиняных обожженных плит с арматурой из проволочной сетки | 1921 |
|
SU120A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| SU, авторское свидетельство N 1354377, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
