Изобретение относится к весоизмерительной технике и может быть использовано в различных отраслях промышленности и транспорта для определения массы сыпучих (песок, мука, цемент и т.п.) и наливных (сжиженный газ, нефтепродукты, молоко, химические реактивы и т.п.) грузов при погрузке или выгрузке транспортного средства.
Известны способ и устройство для взвешивания транспортных средств, основанные на регистрации выходных сигналов нескольких горизонтально разнесенных силоизмерительных преобразователей, установленных между грузоприемной платформой и фундаментом. Верхний конец каждого преобразователя удерживает платформу, а нижний находится на опорном элементе фундамента [1]. При реализации данного способа массу груза определяют путем взвешивания заполненного и опорожненного транспортного средства и вычитания полученных величин:
M = Мп - Мг,
где
М - масса груза в транспортном средстве;
Мп - масса заполненного грузом транспортного средства;
Мг - масса опорожненного транспортного средства (масса тары).
Недостатком указанного способа являются громоздкость и высокая стоимость необходимого для его реализации оборудования (сооружение монолитного фундамента, необходимость периодической профилактики, градуировки и поверки силоизмерительных преобразователей), а также большие затраты времени и средств на передвижение транспортного средства от места погрузки или выгрузки до весоизмерительного устройства.
Из известных способов наиболее близким по технической сущности к изобретению является способ, основанный на измерении вертикального перемещения грузоприемной платформы транспортного средства относительно его осей за счет деформации пружин, установленных между платформой и осями (прототип) [2]. Вертикальное перемещение платформы измеряется датчиком индукционного типа, вырабатывающим электрический сигнал, характеризующий относительное положение двух элементов датчика, связанных с платформой и с осью транспортного средства. Известны также технические решения по реализации данного способа с использованием тензометрического [3] , резистивного [4], магнитного [5] и оптического [6] датчиков перемещения.
Недостатками известного способа являются необходимость градуировки и периодической поверки датчиков перемещения, а также низкая точность взвешивания, обусловленная тем, что коэффициент жесткости пружин может изменяться в процессе эксплуатации транспортного средства и в результате сезонных перепадов температуры.
Целью настоящего изобретения является повышение точности определения массы груза, удешевление измерительного оборудования и обеспечение возможности взвешивания груза непосредственно в местах его погрузки или выгрузки, не оборудованных стационарными платформенными весами.
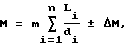
Для достижения решения поставленной цели в способе определения массы груза в транспортном средстве, включающем измерение вертикального перемещения грузоприемной платформы в процессе погрузки или выгрузки транспортного средства, измерение вертикального перемещения производят не менее, чем в трех состояниях загруженности транспортного средства, и дополнительно проводят измерение вертикального перемещения платформы при наложении эталонного груза заданной массы в каждом из состояний загруженности, а массу груза рассчитывают по формуле:
где
М - масса груза в транспортном средстве;
m - масса эталонного груза;
n - количество состояний загруженности транспортного средства, в которых проводят измерения вертикального перемещения;
δi - вертикальное перемещение платформы при наложении эталонного груза в i-м состоянии загруженности;
di= (δi+δi-1)/2 - среднее вертикальное перемещение платформы при наложении эталонного груза между i и i-1-м состоянием загруженности; - максимальная величина вертикального перемещения платформы при полной выгрузке;
- максимальная величина вертикального перемещения платформы при полной выгрузке;
lo - расстояние от базисной точки платформы до уровня дорожного полотна для заполненного транспортного средства;
ln - расстояние от базисной точки платформы до уровня дорожного полотна для порожнего транспортного средства;
до основания 13 для порожней цистерны;
Li = (Li-Li-1) - изменение расстояния от базисной точки платформы до уровня дорожного полотна между i и i-1-м состоянием загруженности;
ΔM - абсолютная погрешность определения массы груза М.
Относительную погрешность определения массы груза εM рассчитывают по формуле;
где  - относительная погрешность измерения величины вертикального перемещения l;
- относительная погрешность измерения величины вертикального перемещения l; - относительная погрешность измерения массы эталонного груза;
- относительная погрешность измерения массы эталонного груза; - относительная погрешность измерения среднего вертикального перемещения d.
- относительная погрешность измерения среднего вертикального перемещения d.
Здесь ΔL, Δm, Δd - абсолютные погрешности измерения соответствующих величин L, m, d (предполагается, что d=d1= =d2=...=dn=dmin; L=L1=L2=...=Ln= Lmax).
Выбор массы эталонного груза m производят по формуле:
где
M* - ожидаемая масса груза (грузоподъемность транспортного средства, указанная в его паспорте); - требуемое значение относительной погрешности определения массы груза М;
- требуемое значение относительной погрешности определения массы груза М; - реальные значения относительных погрешностей измерения величин L, m и d.
- реальные значения относительных погрешностей измерения величин L, m и d.
На чертеже представлена схема, поясняющая сущность способа (на примере цистерны с наливным грузом). Цистерна 1 с наливным грузом 2, снабженная сливным патрубком 9, укреплена на грузоприемной платформе 3, которая через систему рессор 5 опирается на колесные пары 4, установленные на рельсовой решетке (рельсы 6 и шпалы 7), находящейся на земляном полотне 8. Эталонный груз 10 с помощью подъемного устройства 11 может быть наложен на цистерну 1. Для измерения вертикального перемещения платформы 3 используется датчик (индикатор) перемещения 12, опирающийся нижним концом на основание 13, жестко связанное с рельсами 6, а верхним концом - на нижнюю плоскость А-А платформы 3.
Способ реализуется следующим образом. Для каждого из i = 0, 1, 2,...,n состояний загруженности цистерны 1 наливным грузом 2 (i=0 соответствует полной загрузке цистерны, i=n соответствует полностью опорожненной цистерне) измеряют расстояние li от базисной точки в плоскости А-А платформы 3 до основания 13 с помощью датчика 12 (см. чертеж). Эти измерения проводят в процессе опорожнения (или заполнения) цистерны 1 наливным грузом 2 через патрубок 9. Дополнительно для каждого из i = 1,2,...,n состояний загруженности цистерны 1 измеряют датчиком 12 вертикальное перемещение δi(i=0,1,2,...,n) базисной точки в плоскости А-А при наложении на цистерну 1 эталонного груза 10 с помощью подъемного устройства 11 (см.чертеж). В результате измерений получают два ряда величин:
li (i=0,1,2,...,n) - расстояния от базисной точки в плоскости А-А платформы 3 до основания 13 при различных состояниях загруженности цистерны;
δi(i=0,1,2,...,n) - вертикальные перемещение платформы при наложении эталонного груза для различных состояний загруженности цистерны.
В рамках модели упругой деформации зависимость вертикального перемещения платформы при сжатии рессорных пружин от воздействия нагрузки описывается законом Гука [7]:
где - относительная деформация пружин (вертикальное перемещение);
- относительная деформация пружин (вертикальное перемещение);
xo - длина пружин в отсутствии нагрузки;
x - длина пружин при нагрузке;
E - модуль упругости пружин;
F - M•g - действующая сила (вес нагрузки), g=9,81m•c-2 - ускорение свободного падения.
Рассматриваемая система включает целый ряд упругих элементов, испытывающих деформацию при нагрузке цистерны. Это система рессор 5, упругие балки грузоприемной платформы 3, рельсы 6, земляное полотно 8 и т.п.
С учетом этого закон Гука следует записать в виде:
где Ej - модули упругости отдельных элементов системы.
Поскольку определение отдельных составляющих Ej затруднительно, целесообразно заменить их неким эквивалентным модулем упругости, предполагая аддитивность отдельных его составляющих:
При заданном Eθ , который можно определить, например, для каждого транспортного средства путем градуировки с помощью стационарных железнодорожных весов, определение массы груза М сводится к измерению вертикального перемещения платформы и расчету М по формуле:
где - вертикальное перемещение при полной выгрузке (или погрузке) цистерны;
- вертикальное перемещение при полной выгрузке (или погрузке) цистерны; - эквивалентный коэффициент жесткости упругой системы (определяется градуировкой).
- эквивалентный коэффициент жесткости упругой системы (определяется градуировкой).
Использование формулы (8) приводит к большим погрешностям в определении массы груза, обусловленным следующими факторами:
1. Жесткость рессор Kθ не одинакова для разных транспортных средств.
2. Жесткость рессор Kθ не одинакова даже для одного и того же транспортного средства при сезонных изменениях температуры (от - 40oC до +40oC).
3. Величина Kθ может изменяться в результате длительной эксплуатации транспортного средства (деформация, "усталость" металла и т.п. эффекты).
4. Величина Kθ может иметь нелинейную зависимость от состояния загруженности.
5. При использовании формулы (8) необходимо проводить измерения вертикального перемещения платформ на одном и том же участке железнодорожного пути, что не всегда удобно при погрузочно-выгрузочных операциях.
Предлагаемый способ полностью устраняет указанные недостатки. При реализации данного способа эквивалентный коэффициент жесткости Kθ определяется для каждого диапазона упругой деформации  , причем с целью повышения точности его определения берется среднее его значение между i и i-1-м состоянием загруженности
, причем с целью повышения точности его определения берется среднее его значение между i и i-1-м состоянием загруженности
где di= (δi+δi-1)/2 - среднее вертикальное перемещение платформы при наложении эталонного груза между i и i-1-м состоянием загруженности.
Подставляя (9) и (8), получим рабочую форму для определения массы груза М: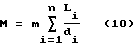
здесь Li= li-li-1 - вертикальное перемещение цистерны между i и i-1 состояниями загруженности.
При реализации данного способа количество состояний загруженности n, в которых проводят измерения вертикального перемещения li, δi, должно быть не менее трех с целью контроля выполнения закона Гука (чем больше n, тем точнее результат определения М). Вместе с тем для любого состояния загруженности можно определить массу груза, залитого или слитого к данному моменту по измеренной величине l1.
Предлагаемый способ имеет следующие преимущества:
1. Высокая точность измерения, обусловленная точностью измерения массы эталонного груза и погрешностью индикатора вертикального перемещения.
2. Низкая стоимость измерительного устройства и оборудования по сравнению со стационарными платформенными весами.
3. Отсутствие операций периодической градировки и поверки.
4. Возможность взвешивания груза непосредственно в местах его погрузки или выгрузки, не оборудованных стационарными платформенными весами.
Погрешность определения массы груза М находится по стандартной методике [8] дифференцированием выражения (10).
Предположим, что
d = d1 = d2 = ... = d3 = dmin
L = L1 = L2 = ... = L3 = Lmax
В этом случае получим верхнюю оценку погрешности
 - относительняае погрешности измерения m, L, d
- относительняае погрешности измерения m, L, d
и тогда
где - относительные погрешность определения массы груза.
- относительные погрешность определения массы груза.
Найдем выражение для выбора массы эталонного груза. Заменяя в (14) величину d по формуле:
получим:
Из (16) выразим величину m:
где
М* - ожидаемая масса груза (грузоподъемность транспортного средства); - требуемая относительная погрешность определения массы груза;
- требуемая относительная погрешность определения массы груза; - реальные значения относительных погрешностей измерения L и m соответственно.
- реальные значения относительных погрешностей измерения L и m соответственно.
Как следует из (16), чем выше m, тем точнее будет результат определения массы груза М. Однако чрезмерное увеличение m приведет к необходимости использования громоздкого устройства для наложения m.
Формула (17) позволяет оптимально выбрать один из основных параметров для реализации предлагаемого способа - массу эталонного груза m.
Источники информации:
1. Заявка N 2125175, Великобритания, кл. 6016 19/02. Платформенные весы. Публикация 84.02.29 N 4957.
2. Патент США N 4106579, 6016 19/08. Устройство для измерения нагрузки на самоходное транспортное средство (прототип). Публикация 15 августа 1978 г., т. 973, N 3.
3. Заявка N 1327697, Великобритания, кл. 6016 12/12. Публикация 73.08.22. N 4404.
4. Заявка N 1288386, Великобритания, кл. 6016 19/12. Электрический способ измерения нагрузки транспортного средства. Публикация 72.09.13.
5. Заявка N 1292816, Великобритания, кл. 6016 19/12. Весы. Публикация 72.10.11.
6. Патент США N 3867990, кл. 6016 19/08. Публикация 75.02.25, т. 931, N 4.
7. Савельев И.В. Курс общей физики, т. 1.-М.: Наука, 1982, 432 с.
8. Кассандрова О.Н., Лебедев В.В. Обработка результатов наблюдений. -М.: Наука, 1970, 104 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЕСЫ ВАГОННЫЕ ПЕРЕНОСНЫЕ | 2005 |
|
RU2289106C2 |
| ЗАПОРНОЕ УСТРОЙСТВО ДЛЯ ТРУБОПРОВОДОВ | 1995 |
|
RU2100685C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ФИЗИЧЕСКИХ СВОЙСТВ ОДНОРОДНЫХ ИЗОТРОПНЫХ УПРУГИХ МАТЕРИАЛОВ | 1993 |
|
RU2061230C1 |
| ТВЕРДОТОПЛИВНЫЙ ГАЗОГЕНЕРАТОР ДЛЯ ПОДВОДНОГО ИСПОЛЬЗОВАНИЯ | 1995 |
|
RU2100065C1 |
| ГАЗОГЕНЕРАТОР НА ТВЕРДОМ ТОПЛИВЕ | 1995 |
|
RU2100064C1 |
| Способ центровки турбоагрегата | 1989 |
|
SU1663390A1 |
| ГАСИТЕЛЬ ГИДРОУДАРОВ | 1992 |
|
RU2049952C1 |
| СПОСОБ ПНЕВМАТИЧЕСКОГО ТРАНСПОРТИРОВАНИЯ СВЯЗНЫХ СЫПУЧИХ МАТЕРИАЛОВ | 1990 |
|
RU2070152C1 |
| ДАТЧИК ПОЛОЖЕНИЯ И СКОРОСТИ ПЕРЕМЕЩЕНИЯ БЫСТРОДВИЖУЩИХСЯ ТЕЛ | 1999 |
|
RU2193207C2 |
| ИЗМЕРИТЕЛЬ ПЕРЕМЕЩЕНИЙ С ОБЪЕМНОЙ ГОЛОГРАММОЙ | 1999 |
|
RU2169348C1 |
Способ может быть использован в различных отраслях промышленности и транспорта для определения массы сыпучих и наливных грузов. Способ заключается в измерении вертикального перемещения грузоприемной платформы в процессе ее загрузки или разгрузки не менее, чем в трех состояниях загруженности транспортного средства, а также в дополнительных измерениях вертикального перемещения платформы при наложении эталонного груза заданной массы в каждом из состояний загруженности. Масса груза в транспортном средстве рассчитывается по формуле, выведенной на основании закона Гука. Преимуществами способа являются высокая точность измерений, обусловленная точностью измерения массы эталонного груза и погрешностью индикатора вертикального перемещения платформы, низкая стоимость измерительного устройства и оборудования по сравнению со стационарными платформенными весами, отсутствие операций периодической градуировки и поверки, а также возможность взвешивания груза непосредственно в местах его погрузки или выгрузки, не оборудованных стационарными платформенными весами. 2 з.п. ф-лы, 1 ил.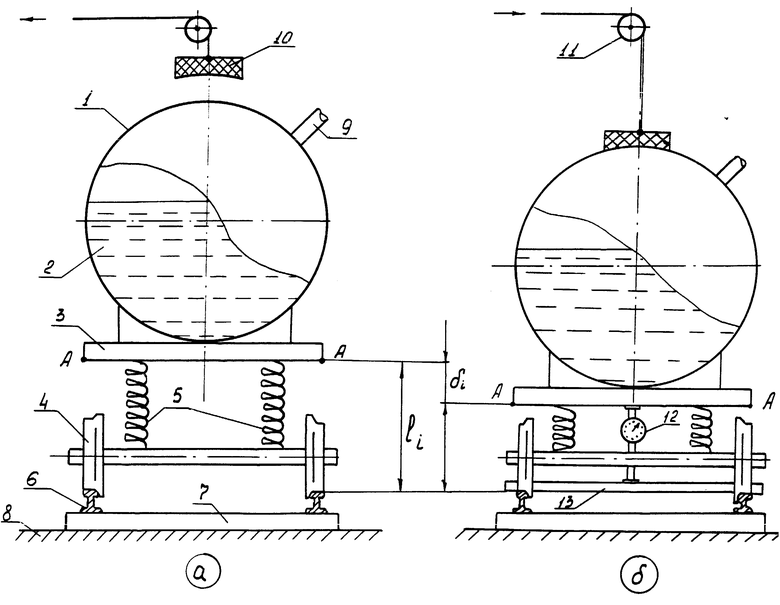
где m - масса эталонного груза;
n - количество состояний загруженности транспортного средства, в которых проводят измерения вертикального перемещения;
di - среднее вертикальное перемещение грузоприемной платформы при наложении эталонного груза в i и (i - 1) состоянии загруженности;
Li - вертикальное перемещение грузоприемной платформы между i и (i - 1) состояниями загруженности;
ΔM - абсолютная погрешность определения массы M груза.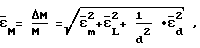
где  средние относительные погрешности измерения Li, m, di соответственно.
средние относительные погрешности измерения Li, m, di соответственно.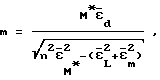
где M* - грузоподъемность транспортного средства; заданная относительная погрешность определения массы M груза.
заданная относительная погрешность определения массы M груза.
| GB, заявка, 2125175, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| US, патент, 4106579, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
