Изобретение относится к оборудованию для контроля и регулирования поперечного перемещения движущегося полотна и может найти применение в целлюлозно-бумажной промышленности, а также в текстильной, химической и металлургической промышленностях.
Известно устройство для правки движущегося полотна, содержащее две опоры правильного вала, одна из которых выполнена подвижной, датчик положения кромки полотна, а также исполнительный механизм, перемещающий подвижную опору (а.с. СССР N 1567486, кл. B 65 H 23/02, D 21 F 1/36, 1990).
Это устройство имеет следующие недостатки: средством перемещения одной из опор может являться только гидроцилиндр, другое средство перемещения для данного изобретения неприемлемо; наличие только одной подвижной опоры и отсутствие тормоза не дает возможности ремонта данного устройства без его отключения, что приведет к останову всей технологической линии, в которой оно установлено; при применении устройства для правки полотна шириной более 2000 мм отсутствие второй подвижной опоры приведет к увеличению его габаритов; отсутствует оперативное управление положением полотна необходимое при запуске устройства в работу.
Известно устройство - сеткоправка с автоматическим и ручным дистанционным управлением, в которой обе опоры правильного вала подвижны и могут перемещаться как раздельно, так и одновременно.
Устройство содержит две подвижные опоры правильного вала, одинаковые по конструкции, регулирующий пневмоклапан и пневматический датчик кромки, входящий в систему автоматического управления положением сетки, расположенную на лицевой стороне буммашины и систему ручного дистанционного управления, с помощью которой регулируется количество воды, поступающей в один из баллонов опоры приводной стороны, второй баллон пневматический. В тех случаях, когда ручное управление с пульта не применяется, опора с приводной стороны оказывается зафиксированной, и сеткоправка работает как обычная с одной неподвижной опорой. Когда же ее быстродействие надо увеличить, наряду с автоматическим перемещением опоры с лицевой стороны прибегают к ручному дистанционному управлению опорой с приводной стороны (Рекламный материал "Valmet Press Section Components", 1987).
Это устройство обладает недостатками. Конструктивно одинаковые, подвижные опоры правильного вала имеют функциональные различия: одна работает только в автоматическом режиме, другая - только в ручном дистанционном. Это функциональное различие опор не допускает возможности произвести осмотр и ремонт их во время работы буммашины. Возможность остановки буммашины из-за поломки устройства в этом случае выше.
Цель изобретения - повышение надежности оборудования, увеличение быстродействия правки, облегчение управления процессом поперечного перемещения движущегося полотна.
Цель достигается тем, что предлагаемое устройство представляет автоматизированный комплекс контроля положения движущегося полотна, в частности сетки бумагоделательной машины, который состоит из двух подвижных опор правильного вала, идентичных по конструктивным признакам и функциональному назначению и работающих от единой системы управления, включающей блок управления, обеспечивающий автоматическое и дистанционное управление, контроль и индикацию работы комплекса на экране местного индикатора на пульте либо на дисплее станции оператора, и блокировочно-тормозную систему, предотвращающую аварийные ситуации в случае выхода из строя исполнительных механизмов или исчезновения питания в энергосистемах: электрической, пневматической, гидравлической.
Конструкция подвижных опор правильного вала позволяет производить их установку как на горизонтальной (в нижнем и в верхнем положении), так и на вертикальной опорной поверхности в зависимости от конструктивных особенностей места установки. При этом обеспечивается легкость замены правильных валов, устанавливаемых на опоры без разбора их конструкции.
На чертеже изображено предлагаемое устройство (пневмовариант).
Две подвижные опоры 1 и 2 правильного вала 3, используемого для регулирования поперечного перемещения движущегося полотна 4, совершенно идентичны как по конструктивным признакам, так и по функциональному назначению. Они имеют исполнительный механизм 5 и тормоз 6 любого принципа действия - механического, пневматического, гидравлического, электрического, и датчик 7 положения правильного вала 3. Блок управления 8 комплексом установлен в пульте управления 9, находящемся на лицевой стороне буммашины (не показана), и соединен линиями связи с датчиком 10 положения кромки движущегося полотна 4, датчиком 7 положения правильного вала 3, а также с исполнительными механизмами 5 и тормозом 6 подвижных опор 1 и 2. Он обеспечивает автоматическое и дистанционное управление положением правильного вала 3, а также контроль и индикацию режимов работы комплекса на дисплее 11.
Устройство работает следующим образом. При нормальной работе буммашины в автоматическом режиме работает только одна опора правильного вала 3, все равно какая - 1 или 2. Вторая опора вала 3 при этом зафиксирована тормозом 6, сигнал на который подается одновременно с сигналом на включение в работу этой опоры в автоматическом режиме. Если опора, работающая в автоматическом режиме, полностью использует свой ход, то происходит автоматическое переключение тормозов, и в работу в автоматическом режиме включается другая опора (при зафиксированной первой).
Положение движущегося полотна 4 показывается на экране либо местного индикатора на пульте 9, либо на дисплее 11. В случае выхода движущегося полотна 4 за пределы допустимого положения на пульте 9 управления работой сеточной части буммашины загорается аварийный сигнал и звучит зуммер.
Управление процессом идет по двум вариантам:
1) по сигналу оператора с пульта управления 9 автоматически отключается тормоз 6 опоры 2, и она включается в работу в автоматическом режиме. При этом опора 1 продолжает работать, если к этому моменту ее ход не выбран, или фиксируется тормозом 6 в случае полного использования своих возможностей;
2) оператор отключает тормоз 6 опоры 2 и управляет ею в дистанционном режиме. При этом опора 1 продолжает работать в автоматическом режиме, если ее ход не выбран. В противном случае она фиксируется своим тормозом 6 без вмешательства оператора.
Опоры правильного вала с исполнительными механизмами абсолютно одинаковы. В случае выхода из строя одной из них ее можно зафиксировать тормозом и произвести осмотр и ремонт на ходу машины.
Автоматизированный комплекс относится к оборудованию для контроля и регулирования поперечного перемещения движущегося полотна (в частности, сетки бумагоделательной машины), и может найти применение в целлюлозно-бумажной, а также в текстильной, химической и металлургической промышленностях. Комплекс состоит из двух подвижных опор правильного вала, работающих от единой системы управления, включающей в себя блокировочно-тормозную систему, предотвращающую аварийные ситуации в случае выхода из строя исполнительных механизмов опор или исчезновения питания в энергосистеме, и блок управления, получающий сигналы от датчика положения кромки полотна и связанный с исполнительными механизмами и тормозами опор. Комплекс допускает автоматическое и ручное дистанционное управление каждой из двух подвижных опор и совмещение автоматического управления одной опорой с ручным дистанционным управлением второй опорой. Увеличивается быстродействие правки, повышается ее надежность, облегчается управление процессом поперечного перемещения движущегося полотна. 1 з.п.ф-лы, 1 ил.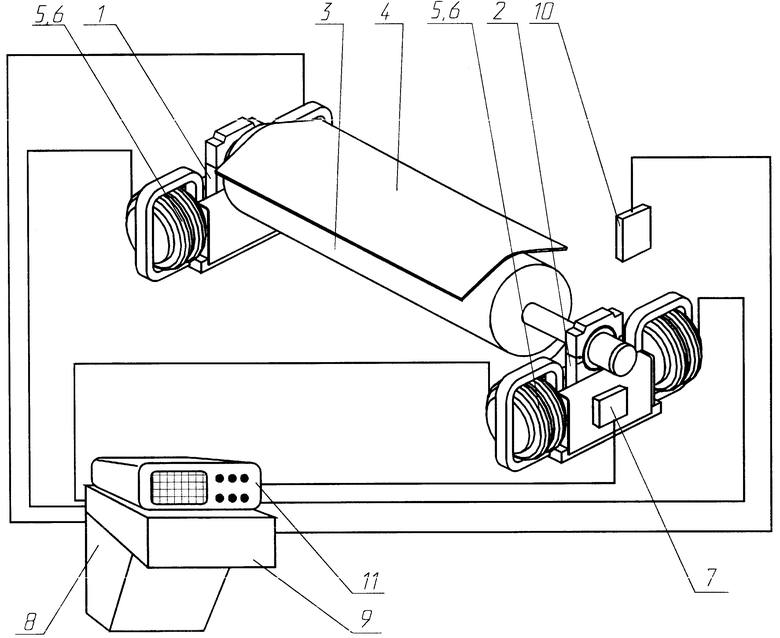
| SU, авторское свидетельство, 1567486, кл | |||
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |

