Изобретение относится к радиопеленгации с измерением фазового сдвига снимаемых с разнесенных антенн сигналов для использования в системе пеленгации скоростных низколетящих целей.
Известна радиоинтерферометрическая система для определения угла прихода радиосигналов от удаленного источника (см. заявку Франции 2344849, кл. G 01 S 3/46). Система содержит линейную группу антенных элементов числом не менее трех, что обеспечивает однозначное измерение угловых координат многошкальным фазовым методом во всей рабочей зоне углов.
Недостатком этого известного радиопеленгатора является влияние на фазу принимаемых напряжений нестабильностей в его антенных элементах и приемных каналах, а также влияние отражений от местных предметов.
Известно устройство (см. заявку EP 0031443, кл. G 01 S 13/52), которое использует фазовый метод измерения угловых координат при дискриминации местных отражений.
Для уменьшения влияния отражений от местных предметов измеряют фазовый сдвиг снимаемого с выходов разнесенных антенн сигнала отраженной радиоволны отдельно для каждой ячейки дальности, подавляя во время измерения сигналы от объектов, находящихся вне данной ячейки дальности. Подавление этих сигналов может быть выполнено с использованием фазокодовой манипуляции излучаемого сигнала псевдослучайной последовательностью с демодуляцией в приемном канале (см., например, DE 2925576, кл. G 01 S 9/37). Это устройство содержит приемные и передающие антенные элементы, генератор передатчика, делитель мощности передатчика и соединенный с его выходом фазовый манипулятор передатчика, фазовые манипуляторы приемника, генератор псевдослучайной последовательности импульсов, блок управляемой задержки. Выход делителя мощности передатчика соединен с гетеродинным входом приемника.
Недостатком данного устройства является влияние на точность измерений угловых координат фазовых нестабильностей в приемных каналах и антенных элементах.
Частично указанные недостатки устраняются в устройстве для регулировки и градуировки пеленгаторного приемника по [1], в процессе работы которого вводятся режимы установки-градуировки и режим пеленгования. В начале работы обнаруживают антенные напряжения пеленгуемого сигнала, переключают радиопеленгатор в режим установки-градуировки, при этом все приемные каналы многоканального пеленгатора подключаются параллельно к одному антенному элементу и выполняется калибровка приемных каналов пеленгуемым сигналом. В режиме пеленгования выявленные неидентичности приемных каналов компенсируются устройствами обработки сигнала.
Данное устройство содержит распределительную схему с внутренним сопротивлением, идентичным заданным значениям внутренних сопротивлений пеленгаторных антенных элементов, и устройства дополнительного усиления антенного напряжения в режиме пеленгования для компенсации его затухания при распределении между каналами.
Недостатком данного устройства является влияние на радиопеленгатор текущих кратковременных фазовых нестабильностей в каждом антенном элементе. Другим недостатком является необходимость увеличения длительности сопровождения цели по дальности при пеленговании отраженного от высокоскоростной цели сигнала на время калибровочных измерений, что не позволяет его использовать для работы в условиях быстропротекающих процессов.
Недостатком данного устройства является также возможность несоответствия внутреннего сопротивления распределительной схемы текущему внутреннему сопротивлению моделируемого антенного элемента на текущей частоте пеленгуемого сигнала и возможность взаимной неидентичности радиотехнических характеристик элементов распределительной схемы.
Особенно ощутимы эти недостатки при применении в антенных элементах частотнозависимых устройств-резонансных фильтров и трансформаторов, например, на базе объемных резонаторов, для обеспечения условия отдачи в нагрузку антенны максимальной мощности (см., например Кочержевский Г.Р., Антенно-фидерное устройство, -М. : Радио и связь, 1981, с. 72 и Лебедев И.В. Техника и приборы СВЧ, М.: Высшая школа, 1970, с. 342).
Для устранения влияния различных фазовых нестабильностей в его приемных каналах [2] , на входы приемных каналов временно подают вспомогательный сигнал вместо напряжений, поступающих от антенной системы радиопеленгатора, а на выходах приемников измеряют разность фаз между отдельными выходными сигналами приемных каналов и запоминают результаты измерений. Выявленные в процессе калибровки фазовые неидентичности каналов компенсируют в процессе работы радиопеленгатора.
Это позволяет выявить и компенсировать долговременно существующие нестабильности в приемных каналах, но не устраняет влияние кратковременных текущих нестабильностей в приемных каналах и антенных элементах.
Прототипом предлагаемого устройства является устройство многоканального радиопеленгатора [3] . Это устройство включает подрешетку приемных антенных элементов, приемопередатчик, цифровой процессор сигнала, пассивный делитель мощности, блок управляемого затухания, отрезок линии передачи, генератор калибровочного (вспомогательного) сигнала, переключатель, устройство ввода калибровочного сигнала по выходу каждого приемного антенного элемента. Выявленные в процессе калибровки амплитудно-фазовые неидентичности запоминают и компенсируют в процессе работы процессора сигнала.
Данное устройство частично устраняет недостатки описанного выше устройства, но не устраняет влияние текущих амплитудно-фазовых нестабильностей в приемных каналах и антенных элементах.
Для устранения указанных недостатков в устройство, содержащее первую и вторую подрешетки линейных групп приемных антенных элементов, последовательно соединенные с выходом каждого приемного антенного элемента первой и второй подрешетки первый преобразователь частоты и второй преобразователь частоты, последовательно соединенные блок фазометров, процессор сигнала и блок управляемой задержки, последовательно соединенные синхронизатор, генератор передатчика, делитель мощности передатчика, первый усилитель мощности передатчика и первый фазовый манипулятор передатчика, последовательно соединенные со вторым выходом делителя мощности передатчика второй усилитель мощности передатчика и второй фазовый манипулятор передатчика, последовательно соединенные блок управляемого затухания и блок ввода калибровочного сигнала, последовательно соединенные со вторым выходом синхронизатора задающий генератор гетеродина, первый делитель мощности гетеродина и первый усилитель мощности гетеродина, а также содержащий первый и второй формирователи второй гетеродинной частоты, второй усилитель мощности гетеродина, второй делитель мощности гетеродина, первый делитель мощности гетеродина, первую и вторую передающие антенны, первый и второй фазовые манипуляторы приемника, генератор псевдослучайной последовательности импульсов, при этом третий выход синхронизатора соединен с входами первого и второго формирователей второй гетеродинной частоты, выходы которых соединены соответственно с вторыми входами вторых преобразователей частоты, выходы вторых преобразователей частоты соединены с входами блока фазометров, выход второго делителя мощности гетеродина соединен с вторым входом первого преобразователя частоты, соответствующего приемному антенному элементу первой подрешетки, выход третьего делителя мощности гетеродина соединен с вторым входом первого преобразователя частоты, соответствующего приемному антенному элементу второй подрешетки, второй выход первого делителя мощности гетеродина соединен с входом второго усилителя мощности гетеродина, выходы генератора псевдослучайной последовательности импульсов соединены с входами блока управляемой задержки, в него введены первый и второй пассивный делители мощности, сумматор мощности, первый распределитель, второй распределитель, первый и второй параллельные регистры, генератор доплеровских частот, последовательно соединены первый фазовый манипулятор передатчика, первый пассивный делитель мощности и первая передающая антенна, второй вход первого фазового манипулятора передатчика соединен с первым выходом первого параллельного регистра, последовательно соединены второй фазовый манипулятор передатчика, второй пассивный делитель мощности, вторая передающая антенна, второй вход второго фазового манипулятора передатчика соединен с первым выходом второго параллельного регистра, а второй выход первого пассивного делителя мощности соединен с первым входом сумматора мощности, второй выход второго пассивного делителя мощности соединен с вторым входом сумматора мощности, выход которого соединен с входом блока управляемого затухания, управляющий вход которого соединен с выходом генератора доплеровских частот, вход которого соединен с вторым выходом процессора сигнала, а также соединены в последовательную цепь второй усилитель мощности гетеродина, второй фазовый манипулятор приемника, второй делитель мощности гетеродина, соединены в последовательную цепь первый усилитель мощности гетеродина, первый фазовый манипулятор приемника, первый делитель мощности гетеродина, а управляющий вход второго фазового манипулятора приемника соединен с вторым выходом второго параллельного регистра, управляющий вход первого фазового манипулятора приемника соединен с вторым выходом первого параллельного регистра, соединены последовательно генератор псевдослучайной последовательности импульсов, первый распределитель, первый параллельный регистр, соединены последовательно блок управляемой задержки, второй распределитель, второй параллельный регистр, а второй выход первого распределителя соединен с вторым входом второго параллельного регистра, второй выход второго распределителя соединен с вторым входов первого параллельного регистра.
В предлагаемом устройстве приемные антенные элементы и передающие элементы содержат последовательно соединенные проходной цилиндрический резонатор, отрезок прямоугольного волновода и пирамидальный рупор с различным расширением в главных плоскостях с квадратным сечением отверстия в горловине рупора, а блок ввода калибровочного сигнала выполнен в виде рупорной антенны, ориентированной в сторону приемных антенных элементов.
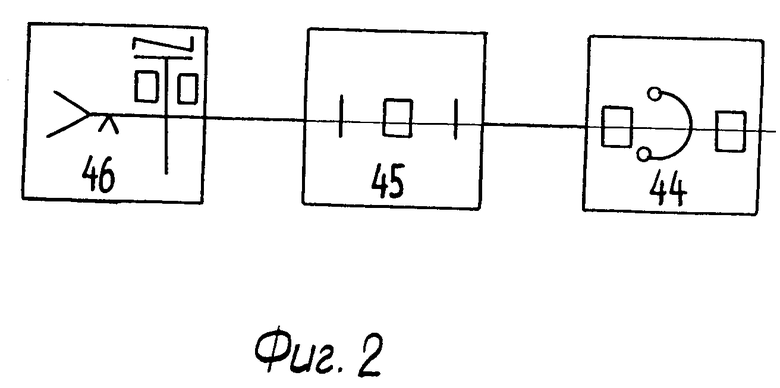
На фиг. 1 изображена структурная схема варианта реализации предлагаемого многоканального радиопеленгатора; на фиг. 2 - структурная схема варианта реализации приемного и передающего антенного элементов.
Устройство содержит первую 1 и вторую 2 подрешетки линейных групп приемных антенных элементов, последовательно соединенные с выходом каждого приемного антенного элемента 3 -8 первой и второй подрешетки, первый преобразователь частоты 9 и второй преобразователь частоты 10, последовательно соединенные блок фазометров 11, процессор сигнала 12 и блок управляемой задержки 13, последовательно соединенные синхронизатор 14, генератор передатчика 15, делитель мощности передатчика 16, первый усилитель мощности передатчика 17 и первый фазовый манипулятор передатчика 18, последовательно соединенные с вторым выходом делителя мощности передатчика 16 второй усилитель мощности передатчика 19 и второй фазовый манипулятор передатчика 20, последовательно соединенные блок управляемого затухания 21 и блок ввода калибровочного сигнала 22, последовательно соединенные со вторым выходом синхронизатора 14 задающий генератор гетеродина 23, первый делитель мощности гетеродина 24 и первый усилитель мощности гетеродина 25, а также содержащий первый 26 и второй 27 формирователи второй гетеродинной частоты, второй усилитель мощности гетеродина 28, второй делитель мощности гетеродина 29, третий делитель мощности гетеродина 30, первую 31 и вторую 32 передающие антенны, первый 33 и второй 34 фазовые манипуляторы приемника, генератор псевдослучайной последовательности импульсов 35, при этом третий выход синхронизатора 14 соединен с входами первого 26 и второго 27 формирователей второй гетеродинной частоты, выходы которых соединены соответственно с вторыми входами вторых преобразователей частоты 10, выходы вторых преобразователей частоты 10 соединены с входами блока фазометров 11, выход второго делителя мощности гетеродина 29 соединен с вторым входом первого преобразователя частоты 9-1, соответствующего приемному антенному элементу первой подрешетки 1, выход третьего делителя мощности гетеродина 30 соединен с вторым входом первого преобразователя частоты 9-2, соответствующего приемному антенному элементу второй подрешетки 2, второй выход первого делителя мощности гетеродина 24 соединен с входом второго усилителя мощности гетеродина 28, выходы генератора псевдослучайной последовательности импульсов 35 соединены с входами блока управляемой задержки 13. В него введены первый 36 и второй 37 пассивный делители мощности, сумматор мощности 38, первый распределитель 39, второй распределитель 40, первый 41 и второй 42 параллельные регистры, генератор доплеровских частот 43, последовательно соединены первый фазовый манипулятор передатчика 18, первый пассивный делитель мощности 36 и первая передающая антенна 31, второй вход первого фазового манипулятора передатчика 18 соединен с первым выходом первого параллельного регистра 41, последовательно соединены второй фазовый манипулятор передатчика 20, второй пассивный делитель мощности 37, вторая передающей антенна 32, второй вход второго фазового манипулятора передатчика 20 соединен с первым выходом второго параллельного регистра 42, а второй выход первого пассивного делителя мощности 36 соединен с первым входом сумматора мощности 38, второй выход второго пассивного делителя мощности 37 соединен с вторым входом сумматора мощности 38, выход которого соединен с входом блока управляемого затухания 21, управляющий вход которого соединен с выходом генератора доплеровских частот 43, вход которого соединен с вторым выходом процессора сигнала 12. Также соединены в последовательную цепь второй усилитель мощности гетеродина 28, второй фазовый манипулятор приемника 34, третий делитель мощности гетеродина 30, соединены в последовательную цепь первый усилитель мощности гетеродина 25, первый фазовый манипулятор приемника 33, второй делитель мощности гетеродина 29, а управляющий вход второго фазового манипулятора приемника 34 соединен с вторым выходом второго параллельного регистра 42, управляющий вход первого фазового манипулятора приемника 33 соединен с вторым выходом первого параллельного регистра 41. Соединены последовательно генератор псевдослучайной последовательности импульсов 35, первый распределитель 39, первый параллельный регистр 41, соединены последовательно блок управляемой задержки 13, второй распределитель 40, второй параллельный регистр 42, а второй выход первого распределителя 39 соединен с вторым входом второго параллельного регистра 42, второй выход второго распределителя 40 соединен с вторым входом первого параллельного регистра 41.
Приемные антенные элементы и передающие элементы содержат последовательно соединенные проходной цилиндрический резонатор 44, отрезок прямоугольного волновода 45 и пирамидальный рупор 46 с различным расширением в главных плоскостях с квадратным сечением отверстия в горловине рупора, а блок ввода калибровочного сигнала 22 выполнен в виде рупорной антенны, ориентированной в сторону приемных антенных элементов.
Макет предлагаемого устройства реализован на схеме, изображенной на фиг. 1.
Пассивный делитель мощности 36 и 37 выполнен в виде волноводно-коаксиального тройника.
Сумматор мощности 38 выполнен на микрополосковых линиях.
Блок управляемого затухания 21 выполнен в виде квадратурного амплитудного модулятора.
Связь блока 21 с блоком ввода калибровочного сигнала 22, выполненного в виде рупорной антенны, осуществляется по коаксиальной линии передачи.
Антенна 22 расположена на краю рабочей зоны радиопеленгатора по углу места и удалена от приемных антенных элементов на расстояние, превышающее половину линейного размера элемента разрешения по дальности, определяемого зоной пространственной корреляции отраженного и опорного сигналов.
Излучаемый сигнал на выходе передающих рупорных антенн 31 и 32 и на выходе рупорной антенны 22 - фазокодоманипулированный. Задержка сигнала на выходе рупорной антенны 22 относительно сигнала на выходе антенн 31 и 32 равна времени распространения по коаксиальным линиям передачи от делителей мощности 36 и 37 до рупорной антенны 22.
Радиопеленгатор имеет внутреннюю систему стробирования принимаемого отраженного от цели сигнала по дальности, обеспечиваемую корреляционным методом измерения.
Для уменьшения влияния отражения от местных предметов во время калибровочных измерений задержку сигнала на выходе рупорной антенны 22 и задержку псевдослучайной последовательности с выхода блока 13 подбирают такими, чтобы в одном из стробов дальности, используемых при калибровке, максимально подавлялись переотражения калибровочного сигнала местными предметами.
Управление режимами работы приемопередатчика и управляемого генератора доплеровских частот 43 выполняет процессор сигнала 12.
Процессор 12 может быть реализован на однокристальной микроЭВМ семейства МК 51 (см. Боборыкин А.В. и др. Однокристальные микроЭВМ.-М.: МИКАП, 1994, с. 113 - 114 рис. 2.2 а, б), имеющей режим многопроцессорной работы (см. с. 129).
Устройство работает следующим образом.
На выходе передающих антенных элементов 31 и 32 генерируется фазокодоманипулированный СВЧ-сигнал, который излучают в открытое пространство. Часть СВЧ-сигнала через пассивные делители мощности 36 и 37, а также сумматор мощности 38 поступает на вход блока управляемого затухания 21. Отраженный от движущейся цели сигнал приобретает допплеровский сдвиг частоты и поступает на вход приемных антенных элементов 3...8 и далее в приемные каналы первого 9 и второго 10 преобразователей частоты, где выполняются его корреляционная обработка для стробирования по дальности, усиление и преобразование к удобному для фазовых измерений виду, режекция сигналов от неподвижных объектов.
После обнаружения пеленгуемого сигнала процессор сигнала 12 запускает управляемый генератор 43 в режим генерации напряжения с частотой, величина которой равна величине доплеровского сдвига частоты отраженного сигнала. Напряжение с выхода управляемого генератора 43 поступает на блок управляемого затухания 21, где выполняется амплитудная модуляция сигнала несущей частоты за счет периодического изменения коэффициента пропускания линии передачи. Спектр сигнала на выходе блока 21 содержит составляющую, равную частоте пеленгуемого сигнала. Этот сигнал по коаксиальной линии поступает в рупорную антенну 22 и излучается в сторону приемных антенных элементов 3 - 8. Для приема и выделения калибровочного сигнала при измерении установочного фазового сдвига процессор сигнала 12 управляет блоком управляемой задержки 13 и переводит радиопеленгатор в режим стробированной дальности, величина которой меньше половины суммы электрической длины коаксиального волновода от блока 21 до выхода рупорной антенны 22 и расстояния от антенны 22 до антенны 8 примерно на половину ширины строба дальности.
Вспомогательное антенное напряжение поступает параллельно на все приемные каналы через приемные антенные элементы 3 - 8, усиливается и преобразовывается к удобному для фазовых измерений виду.
В блоке фазометров 11 выполняются измерения установочного фазового сдвига и процессор сигнала 12 запоминает их результаты. После этого процессор 12 переключает радиопеленгатор в режим пеленгования отраженного от цели сигнала, блок фазометров 11 выполняет фазовые измерения по пеленгуемому сигналу и процессор сигнала 12 обрабатывает их с учетом результатов калибровочных измерений установочного фазового сдвига.
Измерения угловых координат пеленгуемого сигнала выполняется многошкальным фазовым методом, для чего в вертикально расположенной линейной группе приемных антенных элементов нижний рупор расположен в 1,5+/-0,1 раза дальше от среднего рупора, чем верхний рупор, а один из рупоров горизонтально расположенной линейной группы приемных антенных элементов, например рупор 7 расположен в 1,5+/-0,1 раза дальше от среднего рупора 8, чем рупор 6.
Развязка приемных и передающих антенн от перетекаемой мощности достигается за счет некоррелированности псевдослучайной последовательности управляющих импульсов соседних каналов радиопеленгатора, достигаемой временным сдвигом управляющих последовательностей примерно на половину их длины в распределителях 39 и 40.
Фазочастотные характеристики антенных элементов 3 - 8 зависят от характеристик проходных цилиндрических резонаторов 44, применяемых как СВЧ-фильтры.
Одновременная калибровка на частоте пеленгуемого сигнала двух граничащих приемных подрешеток уменьшает вероятность срыва сопровождения высокоскоростной цели при переходе из сектора ответственности одной приемной подрешетки в сектор ответственности второй приемной подрешетки.
Экспериментальные исследования макета в составе системы пеленгации скоростных низколетящих целей показали, что предлагаемое устройство позволяет исключить влияние кратковременных текущих нестабильностей в приемных каналах и антенных элементах на точность измерения угловых координат пеленгуемого сигнала.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАЛОГАБАРИТНЫЙ РАДИОЛОКАТОР ТРАНСПОРТНОГО СРЕДСТВА | 1997 |
|
RU2117964C1 |
| МОНОИМПУЛЬСНАЯ РЛС | 2004 |
|
RU2267137C1 |
| СИСТЕМА САМООБОРОНЫ ТРАНСПОРТНОГО СРЕДСТВА | 1995 |
|
RU2102678C1 |
| ПРИЕМОПЕРЕДАЮЩАЯ ВЫСОКОЧАСТОТНАЯ ЧАСТЬ ДЛЯ МАЛОГАБАРИТНОГО РАДИОЛОКАТОРА | 1994 |
|
RU2079149C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЕТКИ | 1992 |
|
RU2042140C1 |
| КОРОТКОИМПУЛЬСНЫЙ РАДИОЛОКАТОР С ЭЛЕКТРОННЫМ СКАНИРОВАНИЕМ В ДВУХ ПЛОСКОСТЯХ И С ВЫСОКОТОЧНЫМ ИЗМЕРЕНИЕМ КООРДИНАТ И СКОРОСТИ ОБЪЕКТОВ | 2014 |
|
RU2546999C1 |
| РАДИОДАТЧИК | 1994 |
|
RU2087922C1 |
| СПОСОБ СНИЖЕНИЯ НИЖНЕЙ ГРАНИЦЫ ИЗМЕРЕНИЯ МАЛЫХ ВЫСОТ ДО НУЛЯ И УСТРОЙСТВО КОГЕРЕНТНОГО ИМПУЛЬСНО-ДОПЛЕРОВСКОГО РАДИОВЫСОТОМЕРА, РЕАЛИЗУЮЩЕГО СПОСОБ | 2008 |
|
RU2412450C2 |
| ПРОТИВОУГОННОЕ УСТРОЙСТВО ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2302953C1 |
| ПРОТИВОУГОННОЕ УСТРОЙСТВО ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2373082C1 |
Изобретение относится к радиопеленгации с измерением фазового сдвига снимаемых с разнесенных антенн сигналов и предназначено для использования в системе пеленгации скоростных низколетящих целей, в частности в системе активной защиты танка от противотанковых снарядов. Устройство имеет генератор передатчика, два преобразователя частоты, генератор псевдослучайной последовательности импульсов, четное число передающих антенн и подрешеток линейных групп приемных антенных элементов, блок фазометров, фазовые манипуляторы передатчика и приемника, два пассивных делителя мощности, сигнал со вторых выходов которых через сумматор мощности и блок управляемого затухания поступает на блок ввода калибровочного сигнала, выполненного в виде рупорной антенны, ориентированной в сторону приемных антенных элементов. Управляющий вход блока управляемого затухания соединен с выходом генератора доплеровских частот, управляемого процессором сигнала. Первые выходы пассивных делителей мощности соединены соответствующими передающими антеннами. 1 з.п.ф-лы, 2 ил.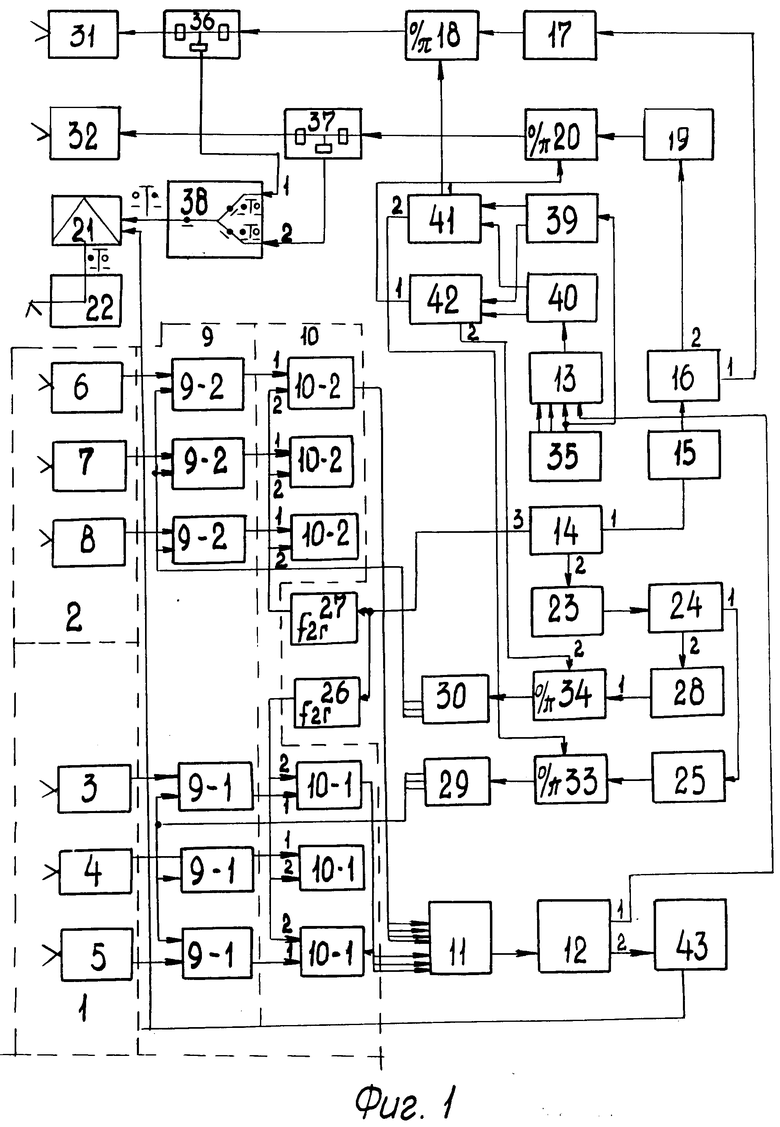
| FR, патент, 2344849, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| EP, патент, 0031443, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| DE, патент, 2053542, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| DE, патент, 1591720, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Радиолокационные системы сопровождения низколетящих целей / Под ред.В.М.Комарова | |||
| Серия Спец | |||
| электроника | |||
| - М.: ВНИИПИ, 1990, с | |||
| Способ крашения тканей | 1922 |
|
SU62A1 |
| Способ очищения сернокислого глинозема от железа | 1920 |
|
SU47A1 |

