Предлагаемое изобретение относится к радиолокационным системам (РЛС), преимущественно к когерентным РЛС обнаружения целей с непрерывным излучением, к которым предъявлены повышенные требования к снижению времени обзора сцены, использующим ЛЧМ сигнал, дополнительно манипулированный по частоте, и амплитудный суммарно-разностный моноимпульсный принцип пеленгации, работающим на подвижных носителях.
В известных бортовых моноимпульсных РЛС используется импульсный режим работы приемопередатчика. Примером является устройство [2, рис.1.9]. В этом устройстве сигнал передатчика через антенный переключатель и суммарно-разностный преобразователь поступает в моноимпульсную антенну амплитудного типа и излучаются по всем лучам в направлении цели, принимаемые моноимпульсной антенной отраженные сигналы после суммарно-разностного преобразования подаются с его первого (суммарного) выхода через последовательно соединенные антенный переключатель, смеситель и УПЧ суммарного канала на первый вход фазового детектора, на второй вход фазового детектора приходит разностный сигнал, приходящий со второго (разностного) выхода суммарно-разностного преобразователя через последовательно соединенные смеситель и УПЧ разностного канала. В результате фазового детектирования образуется сигнал углового рассогласования цели относительно равносигнального направления (РСН), который через усилитель управляет системой управления антенной, соответственно положением РСН антенны. Сигнал ошибки используется в режиме автосопровождения цели по углу. Для обеспечения независимости крутизны пеленгационной характеристики устройства по углу от уровня входного сигнала оба УПЧ с помощью АРУ, подключенного по входу к выходу УПЧ суммарного канала, охвачены обратной связью.
Недостатком устройства является работа в импульсном режиме с простым не когерентным сигналом, при котором требуется повышенная импульсная мощность передатчика и реализуется низкая помехозащищенность.
Известно устройство моноимпульсной РЛС, работающее с ЛЧМ сигналом в импульсном с малой скважностью режиме (квазинепрерывном режиме), измеряющее дальность и угловые координаты цели [2, рис 1.22, стр. 41], содержащее первые смесители суммарного и разностного каналов, где принимаемые высокочастотные сигналы гетеродинируются, далее последовательно усиливаются в УПЧ суммарного и разностного каналов и переносятся с помощью 2 смесителей на видеочастоту. Опорной частотой, приходящей на вторые входы 2 смесителей, является ЛЧМ сигнал, модулирующий зондирующий сигнал, смещенный к первой промежуточной частоте. Сигналы суммы и разности после 2 смесителей поступают на усилители доплеровских частот (УДЧ) суммарного и разностного каналов, где фильтруются в полосе рабочих разностных частот отраженного сигнала. Сигналы УДЧ после смешения с частотой следящего гетеродина поступают на доплеровские фильтры (ДФ) суммарного и разностного каналов. Таким образом, сигналы ДФ суммарного и разностного каналов содержат отфильтрованные в узкой полосе ДФ сигналы, соответствующие одной из целей для которой сдвиг частоты отраженного сигнала относительно зондирующего (сдвиг частоты соответствует дальности до цели), соответствует настройке следящего гетеродина. Управление частотой следящего гетеродина происходит от частотного дискриминатора, подключенного к ДФ разностного канала. При захвате частоты сдвига отраженного сигнала относительно зондирующего выходной сигнал фазового детектора (сигнал ошибки), подключенного к выходам ДФ суммарного и разностного каналов, соответствует угловому отклонению цели от РСН и используется далее схемой фиксации углового положения РСН, когда при сканировании антенны сигнал ошибки переходит через ноль. Кроме того, измерение частоты следящего гетеродина в режиме захвата позволяет определить дальность до цели.
Недостатком этой моноимпульсной РЛС является то, что она, работая в квазинепрерывном режиме, имеет минимум в два раза большую пиковую мощность передатчика по сравнению с мощностью передатчика, работающего в непрерывном режиме. Кроме того, в режиме обзора требуется большое время поиска сигнала цели (обзора сцены) во всем рабочем диапазоне, так как для анализа сигнала на каждой дальности требуется перестройка частоты повторения зондирующих импульсов, обеспечивающая нахождение отраженного сигнала между зондирующими.
Другая квазимоноимпульсная РЛС, работающая с непрерывным зондирующим сигналом [3], образованным манипуляцией 2-х несущих частот, модулированных единым непрерывным ЛЧМ сигналом, следит по дальности за земной поверхностью при боковом визировании с борта летательного аппарата (ЛА) в направлении угломестного РСН, образованного двумя коммутируемыми через период лучами антенны. Каждому лучу соответствует своя несущая частота.
Недостатком устройства является то, что за счет попеременного переключения передатчика к лучам антенны эффективность использования мощности передатчика в два раза ниже чем в моноимпульсной РЛС, излучающей, принимающей и анализирующей сигнал по лучам одновременно. Как и в предыдущей РЛС с квазинепрерывным излучением для анализа наличия сигналов в широком рабочем диапазоне дальностей необходима перестройка частоты манипуляции несущих частот, что увеличивает необходимое время поиска целей (обзора сцены) в режиме обзора.
Наиболее близким по технической сущности к предлагаемой моноимпульсной РЛС и принятой в качестве прототипа является устройство [1]. Устройство-прототип допускает перестройку несущей частоты от импульса к импульсу и использует сигнал с внутриимпульсной фазовой манипуляцией. Отраженные сигналы после суммарно-разностного преобразования подаются на два канала - суммарный и разностный. Каждый канал представляет последовательно соединенные усилитель высокой частоты (УВЧ), смеситель, усилитель промежуточной частоты (УПЧ), блок фазовых детекторов, амплитудные квантователи сигналов фазовых детекторов и цифровой согласованный фильтр. Полученные на выходах цифровых согласованных фильтров квадратурные составляющие сигналов далее поступают в дискриминатор угла, где определяется отклонение цели от РСН (дискриминатор угла выполняет операцию скалярного произведения). Квадратурные составляющие суммарного сигнала, кроме того, через блок объединения квадратур поступают в устройство обработки информации, в которое входит блок первичной обработки (накопление и обнаружение сигнала, первичное измерение координат целей), следящий дальномер и блок вторичной обработки сигнала (анализ доплеровского расширения спектра сигнала на анализируемой дальности по квадратурным составляющим суммарного сигнала и классификация цели, выбор цели на автосопровождение, выдача исходных данных о дальности цели в следящий дальномер и азимута цели на привод антенны).
Недостатком устройства является импульсный режим излучения, при котором пиковая мощность передатчика минимум в два раза выше значения при непрерывном излучении. В реальности это значение больше двух, так как в режиме поиска для просмотра целевой обстановки в большом диапазоне дальностей приходится перестраивать длительность фазоманипулированного зондирующего сигнала, соответственно увеличивать скважность, чтобы минимальная задержка сигнала была больше длительности зондирующего. При небольшом перекрытии отраженного фазоманипулированного сигнала с зондирующим в устройстве-прототипе производится уменьшение числа разрядов кода опорного сигнала (обнуление разрядов сдвигающих регистров цифрового согласованного фильтра) и изменение порога обнаружения в зависимости от дальности до анализируемой цели. Однако это не обеспечивает параллельный прием и обнаружение сигнала (с целью сокращения времени выхода в эфир при поиске сигнала) в более широком диапазоне дальностей при большом процентном перекрытии зондирующего сигнала с отраженным, в том числе при непрерывном сигнале.
Технической задачей изобретения является обеспечение возможности работы бортовой моноимпульсной РЛС с единой приемопередающей антенной в непрерывном режиме (фактор, облегчающий выполнение высоконадежного малогабаритного выходного устройства передатчика на полупроводниковых элементах) при одновременном сокращении времени выхода в эфир при обзоре сцены за счет применения частотно-временной развязки приемного тракта от излучаемого ЛЧМ сигнала, манипулируемого по частоте по перестраиваемому дискретно- временному закону. Разнос соседних манипулируемых несущих частот соответствует промежуточной частоте приемника, при этом каждая манипулируемая единицей кода частота излучается и одновременно является гетеродинной для отраженных сигналов, манипулированных по частоте нулем кода и наоборот.
Сущность изобретения заключается в том, что в моноимпульсную РЛС, содержащую: последовательно соединенные усилитель мощности, антенный переключатель, суммарно-разностный преобразователь и антенный блок, а также возбудитель, синхронизатор, устройство обработки информации (УОИ), 2-канальный суммарно-разностный приемник, фазовые детекторы суммарного и разностного каналов, блок объединения квадратур, дискриминатор угла и привод антенны, причем выход привода антенны кинематически связан с антенным блоком, вход привода антенны соединен с вторым выходом УОИ, второй (информационный) выход привода антенны соединен с шестым входом УОИ, 2-канальный суммарно-разностный приемник содержит последовательно соединенные по двум входам-выходам суммарного и разностного каналов двухканальные усилитель высокой частоты, балансный смеситель и 2-канальный усилитель промежуточной частоты (УПЧ), гетеродинный вход балансного смесителя является третьим гетеродинным входом 2-канального суммарно-разностного приемника, первый и второй входы усилителя высокой частоты являются входами, а первый и второй выходы усилителя промежуточной частоты являются выходами суммарного и разностного каналов 2-канального суммарно-разностного приемника соответственно, УОИ содержит блок первичной обработки и блок вторичной обработки, первый выход блока первичной обработки соединен с первым входом блока вторичной обработки соответственно, третий, четвертый и первый выходы блока вторичной обработки являются вторым, четвертым и третьим выходом УОИ, третий вход УОИ соединен с первым входом блока первичной обработки, четвертый выход возбудителя соединен с первыми входами фазовых детекторов суммарного и разностного каналов, третий выход синхронизатора соединен с четвертым входом УОИ, первый выход 2-канального суммарно-разностного приемника соединен со вторым входом фазового детектора суммарного канала, второй выход 2-канального суммарно-разностного приемника соединен со вторым входом фазового детектора разностного канала, выход блока объединения квадратур соединен с третьим входом УОИ, введены последовательно соединенные синтезатор зондирующего сигнала (СЗС), умножитель частоты, коммутируемый фильтр передачи и направленный ответвитель, второй выход которого соединен с входом усилителя мощности, последовательно соединенные усилитель доплеровской частоты суммарного канала и блок доплеровских фильтров суммарного канала, последовательно соединенные усилитель доплеровской частоты разностного канала и блок доплеровских фильтров разностного канала, блоки опроса суммарного и разностного каналов, схема автоматической регулировки усиления (АРУ), выход которой соединен с третьими входами усилителей доплеровской частоты суммарного и разностного каналов, генератор манипулирующих последовательностей, коммутируемые фильтры суммарного и разностного каналов, измеритель скорости и сноса и делитель, третий выход направленного ответвителя соединен с третьим (гетеродинным) входом 2-канального суммарно-разностного приемника, первый выход антенного переключателя через коммутируемый фильтр суммарного канала соединен с первым (суммарным) входом 2-канального суммарно-разностного приемника, второй (разностный) выход суммарно-разностного преобразователя соединен через коммутируемый фильтр разностного канала с вторым (разностным) входом 2-канального суммарно-разностного приемника, выход фазового детектора суммарного канала соединен с вторым входом усилителя доплеровской частоты суммарного канала, выход которого дополнительно соединен с входом АРУ, выход фазового детектора разностного канала соединен с вторым входом усилителя доплеровской частоты разностного канала, второй выход синхронизатора соединен с первым входом синтезатора зондирующего сигнала, пятым входом УОИ и третьими входами блоков доплеровских фильтров суммарного и разностного каналов, третий выход возбудителя соединен с первым входом генератора манипулирующих последовательностей, входом синхронизатора, с первыми входами блоков доплеровских фильтров суммарного и разностного каналов и седьмым входом УОИ, первый и второй выходы возбудителя соединены соответственно со вторым и третьим входом синтезатора зондирующего сигнала, первый выход синхронизатора через генератор манипулирующих последовательностей соединен с шестым входом синтезатора зондирующего сигнала и вторым (управляющим) входом коммутируемого фильтра передачи, второй (инверсный) выход генератора манипулирующих последовательностей соединен со вторыми (управляющими) входами коммутируемых фильтров суммарного и разностного каналов, третий и четвертый выходы УОИ соединены соответственно с пятым и четвертым входами синтезатора зондирующего сигнала, первый выход УОИ соединен с первыми (управляющими) входами усилителей доплеровской частоты суммарного и разностного каналов, выходы с первого по N-й блока доплеровских фильтров суммарного канала соединены соответственно с входами блока опроса суммарного канала со второго по (N+1)-й, выходы с первого по N-й блока доплеровских фильтров разностного канала соединены соответственно с входами блока опроса разностного канала со второго по (N+1)-й, третий выход синхронизатора дополнительно соединен с первыми входами блоков опроса суммарного и разностного каналов, выход блока опроса разностного канала через последовательно соединенные дискриминатор угла и делитель подключен к восьмому входу УОИ, выход блока опроса суммарного канала соединен с входом блока объединения квадратур и первым входом дискриминатора угла, выход блока объединения квадратур дополнительно соединен с первым входом делителя, первый и второй выход измерителя скорости и угла сноса соединены соответственно с первым и вторым входом УОИ, первый, второй, четвертый и шестой входы УОИ соединены с четвертым, пятым, вторым и шестым входами блока вторичной обработки соответственно, второй выход блока вторичной обработки является первым выходом УОИ, четвертый вход блока первичной обработки является восьмым входом УОИ, седьмой вход УОИ соединен с третьим входом блока первичной обработки, пятый вход УОИ соединен с вторым входом блока первичной обработки, второй выход блока первичной обработки соединен с третьим входом блока вторичной обработки.
Синтезатор зондирующего сигнала (СЗС) состоит из 2-х каналов, каждый из которых содержит генератор линейно-частотно-модулированного сигнала, фазовый детектор, балансный смеситель, направленный ответвитель, фильтр низкой частоты и генератор, управляемый напряжением, на выход синтезатора зондирующего сигнала через первый коммутатор, проходит сигнал одного из каналов, при этом первый вход СЗС соединен с первыми синхронизирующими входами первого и второго генераторов линейно-частотно-модулированного напряжения, четвертый и пятый входы СЗС соединены со вторыми входами первого и второго генераторов линейно-частотно-модулированного напряжения соответственно, выход первого генератора линейно-частотно-модулированного напряжения последовательно через третий фазовый детектор, первый фильтр низкой частоты и первый генератор, управляемый напряжением, соединен с входом второго направленного ответвителя, первый выход которого через второй балансный смеситель соединен со вторым входом третьего фазового детектора, второй выход второго направленного ответвителя через первый коммутатор соединен с выходом СЗС, выход второго генератора линейно-частотно-модулированного напряжения последовательно через четвертый фазовый детектор, второй фильтр низкой частоты и второй генератор, управляемый напряжением, соединен с входом третьего направленного ответвителя, первый выход которого через третий балансный смеситель соединен со вторым входом четвертого фазового детектора, второй выход третьего направленного ответвителя соединен с третьим входом первого коммутатора, второй и третий вход СЗС соединены с первыми входами второго и третьего балансных смесителей соответственно, шестой вход СЗС соединен с первым (управляющим) входом первого коммутатора.
Сущность изобретения поясняется дальнейшим описанием и чертежами, на которых представлены:
Фиг.1 - структурная схема моноимпульсной РЛС;
Фиг.2 - эпюры, поясняющие структуру зондирующего и отраженного сигнала,
Фиг.3 - структурная схема коммутируемых фильтров (КФ),
Фиг.4 - структурная схема синтезатора зондирующего сигнала (СЗС),
Фиг.5- структурная схема синхронизатора (С),
Фиг.6 - структурная схема усилителей доплеровских частот (УДЧ),
Фиг.7 - вид амплитудно-частотной характеристики усилителей доплеровских частот (УДЧ),
Фиг.8 - структурная схема блоков доплеровских фильтров (БДФ),
Фиг.9 - структурная схема блока объединения квадратур (БОК),
Фиг.10 -структурная схема дискриминатора угла (ДУ),
Фиг.11 - эпюры, поясняющие временную диаграмму работы блоков,
Фиг.12 - структурная схема блока первичной обработки сигнала (БПО),
Фиг.13 - блок-схема алгоритма работы блока вторичной обработки (БВО),
Фиг.14 - структурная схема порогового обнаружителя,
Фиг.15 - структурная схема накопителей,
Фиг.16 - структурная схема углового селектора.
Согласно структурной схеме на фиг.1 в предлагаемой моноимпульсной РЛС приняты следующие обозначения:
1 - антенный блок (АБ),
2 - суммарно-разностный преобразователь (СРП.),
3 - антенный переключатель (АП),
4 - усилитель мощности (УМ)
5 - направленный ответвитель (НО),
6 - коммутируемый фильтр передачи (КФ-П),
7 - умножитель частоты (УЧ),
8 - синтезатор зондирующего сигнала (СЗС),
9 - возбудитель(В),
10 - генератор манипулирующих последовательностей (ГМП),
11 - синхронизатор (С),
12 - устройство обработки информации (УОИ),
13 - измеритель скорости и угла сноса (ИСС),
14 - коммутируемый фильтр суммарного канала (КФ-С ),
15 - коммутируемый фильтр разностного канала (КФ-Р ),
16 - 2-канальный суммарно- разностный приемник (Пр),
17 - фазовый детектор суммарного канала (ФД-С ),
18 - фазовый детектор разностного канала (ФД-Р ),
19 - усилитель доплеровской частоты суммарного канала (УДЧ-С),
20 - усилитель доплеровской частоты разностного канала (УДЧ-Р),
21 - автоматическая регулировка усиления (АРУ),
22 - блок доплеровских фильтров суммарного канала (БДФ-С ),
23 - блок доплеровских фильтров разностного канала (БДФ-Р ),
24 - блок опроса суммарного канала (БО-С ),
25 - блок опроса разностного канала (БО-Р ),
26 - блок объединения квадратур (БОК),
27 - дискриминатор угла (ДУ),
28 - делитель (Дел),
29 - привод антенны (ПА),
30 - 2-канальный усилитель высокой частоты (УВЧ),
31 - 2-канальный балансный смеситель (БСМ),
32 - 2-канальный усилитель промежуточной частоты (УПЧ),
33 - блок вторичной обработки (БВО),
34 - блок первичной обработки (БПО).
На структурной схеме фиг.1 предлагаемая моноимпульсная РЛС содержит последовательно соединеные усилитель мощности 4, антенный переключатель 3, суммарно-разностный преобразователь 2 и антенный блок 1, а также возбудитель 9, синхронизатор 11, устройство обработки информации (УОИ) 12, 2-канальный суммарно-разностный приемник 16, фазовые детекторы суммарного 17 и разностного 18 каналов, блок объединения квадратур 26, дискриминатор угла 27 и привод антенны 29, причем выход привода антенны 29 кинематически связан с антенным блоком 1, вход привода антенны 29 соединен с вторым выходом УОИ 12, второй (информационный) выход привода антенны 29 соединен с шестым входом УОИ 12, 2-канальный суммарно-разностный приемник 16 содержит последовательно соединенные по двум входам-выходам суммарного и разностного каналов двухканальные усилитель высокой частоты 30, балансный смеситель 31 и 2-канальный усилитель промежуточной частоты (УПЧ) 32, гетеродинный вход балансного смесителя 31 является третьим гетеродинным входом 2-канального суммарно-разностного приемника 16, первый и второй входы усилителя высокой частоты 30 являются входами, а первый и второй выходы усилителя промежуточной частоты 32 являются выходами суммарного и разностного каналов 2-канального суммарно-разностного приемника 16 соответственно, УОИ 12 содержит блок первичной обработки 34, блок вторичной обработки 33, первый выход блока первичной обработки 34 соединен с первым входом блока вторичной обработки 33, третий, четвертый и первый выходы блока вторичной обработки 33 являются вторым, четвертым и третьим выходом УОИ 12, третий вход УОИ 12 соединен с первым входом блока первичной обработки 34, четвертый выход возбудителя 9 соединен с первыми входами фазовых детекторов суммарного 17 и разностного 18 каналов, третий выход синхронизатора 11 соединен с четвертым входом УОИ 12, первый выход 2-канального суммарно-разностного приемника 16, соединен со вторым входом фазового детектора суммарного канала 17, второй выход 2-канального суммарно-разностного приемника 16 соединен со вторым входом фазового детектора разностного канала 18, выход блока объединения квадратур 26 соединен с третьим входом УОИ 12, синтезатор зондирующего сигнала (СЗС) 8 последовательно через умножитель частоты 7 и коммутируемый фильтр передачи 6 соединен с направленным ответвителем 5, второй выход которого соединен с входом усилителя мощности 4, выход усилителя доплеровской частоты суммарного канала 19 соединен с вторым входом блока доплеровских фильтров суммарного канала 22, выход усилителя доплеровской частоты разностного канала 20 соединен с вторым входом блока доплеровских фильтров разностного канала 23, выход схемы АРУ 21 соединен с третьими входами усилителей доплеровской частоты суммарного 19 и разностного 20 канала, третий выход направленного ответвителя 5 соединен с третьим (гетеродинным) входом 2-канального суммарно-разностного приемника 16, первый выход антенного переключателя 3 через коммутируемый фильтр суммарного канала 14 соединен с первым (суммарньм) входом 2-канального суммарно-разностного приемника 16, второй (разностный) выход суммарно-разностного преобразователя 2 соединен через коммутируемый фильтр разностного канала 15 с вторым (разностным) входом 2-канального суммарно-разностного приемника 16, выход фазового детектора суммарного канала 17 соединен с вторым входом усилителя доплеровской частоты суммарного канала 19, выход которого дополнительно соединен с входом АРУ 21, выход фазового детектора разностного канала 18 соединен с вторым входом усилителя доплеровской частоты разностного канала 20, второй выход синхронизатора 11 соединен с первым входом синтезатора зондирующего сигнала 8, пятым входом УОИ 12 и третьими входами блоков доплеровских фильтров суммарного 22 и разностного 23 каналов, третий выход возбудителя 9 соединен с первым входом генератора манипулирующих последовательностей 10, входом синхронизатора 11, с первыми входами блоков доплеровских фильтров суммарного 22 и разностного 23 каналов и седьмым входом УОИ 12, первый и второй выходы возбудителя 9 соединены соответственно со вторым и третьим входом синтезатора зондирующего сигнала 8, первый выход синхронизатора 11 через генератор манипулирующих последовательностей 10 соединен с шестым входом синтезатора зондирующего сигнала 8 и вторым (управляющим) входом коммутируемого фильтра передачи 6, второй (инверсный) выход генератора манипулирующих последовательностей 10 соединен со вторыми (управляющими) входами коммутируемых фильтров суммарного 14 и разностного 15 каналов, третий и четвертый выходы УОИ 12 соединены соответственно с пятым и четвертым входами синтезатора зондирующего сигнала 8, первый выход УОИ 12 соединен с первыми (управляющими) входами усилителей доплеровской частоты суммарного 19 и разностного 20 каналов, выходы с первого по N-й блока доплеровских фильтров суммарного канала 22 соединены соответственно с входами блока опроса суммарного канала 24 со второго по (N+1)-й, выходы с первого по N-й блока доплеровских фильтров разностного канала 23 соединены соответственно с входами блока опроса разностного канала 25 со второго по (N+1)-й, третий выход синхронизатора 11 дополнительно соединен с первыми входами блоков опроса суммарного 24 и разностного 25 каналов, выход блока опроса разностного канала 25 через последовательно соединенные дискриминатор угла 27 и делитель 28 подключен к восьмому входу УОИ 12, выход блока опроса суммарного канала 24 соединен с входом блока объединения квадратур 26 и первым входом дискриминатора угла 27, выход блока объединения квадратур 26 дополнительно соединен с первым входом делителя 28, первый и второй выход измерителя скорости и угла сноса 13 соединены соответственно с первым и вторым входом УОИ 12, первый, второй, четвертый и шестой входы УОИ 12 соединены с четвертым, пятым, вторым и шестым входами блока вторичной обработки 33 соответственно, второй выход блока вторичной обработки 33 является первым выходом УОИ 12, четвертый вход блока первичной обработки 34 является восьмым входом УОИ 12, седьмой вход УОИ 12 соединен с третьим входом блока первичной обработки 34, пятый вход УОИ 12 соединен с вторым входом блока первичной обработки 34, второй выход блока первичной обработки 34 соединен с третьим входом блока вторичной обработки 33.
На фиг.2 приведены эпюры, поясняющие структуру зондирующего и отраженного сигнала. Обозначения на фиг.2:
f1 - закон изменения частоты первого ЛЧМ сигнала,
f2 - закон изменения частоты второго ЛЧМ сигнала,
tr - задержка отраженного сигнала относительно зондирующего,
fr+fд1 - сдвиг частоты отраженного сигнала относительно зондирующего для первого ЛЧМ сигнала,
fr+fд2 - сдвиг частоты отраженного сигнала относительно зондирующего для второго ЛЧМ сигнала,
fд1 и fд2 - доплеровский сдвиг частоты отраженного сигнала для зондирующих сигналов с частотами f1 и f2 соответственно,
fоп - Δfсм/2 - сдвиг частот между первым и вторым ЛЧМ сигналом.
fоп - опорная промежуточная частота,
Fпр1 - промежуточная частота для первого ЛЧМ отраженного сигнала,
Fпр2 - промежуточная частота для второго ЛЧМ отраженного сигнала.
Коммутируемые фильтры (КФ) 6, 14, 15 аналогичны, предназначены для управляемой частотной селекции проходящих через них сигналов и выполнены согласно схеме, представленной на фиг.3.
На фиг.3 приняты следующие обозначения:
35 - первый коммутатор (Ком 1),
36 - первый фильтр (Ф1),
37 - второй фильтр (Ф2),
38 - второй коммутатор (Ком 2).
На схеме коммутируемого фильтра 6 (фиг.3) первый вход первого коммутатора 35 является первым входом коммутируемого фильтра 6, второй вход которого соединен с вторым и третьим входом первого 36 и второго 37 коммутаторов соответственно, первый выход первого коммутатора 35 через первый фильтр 36 соединен с первым входом второго коммутатора 38, второй выход первого коммутатора 35 через второй фильтр 37 соединен с вторым входом второго коммутатора 38, выход которого является выходом коммутируемого фильтра 6.
Коммутаторы 35 и 38 могут быть реализованы на микросхеме НММС-2027, выпускаемой серийно.
Синтезатор зондирующего сигнала (СЗС) 8 является частью передающего устройства и предназначен для первичного формирования непрерывного ЛЧМ сигнала, манипулированного по частоте временной последовательностью генератора ГМП 10, и выполнен согласно схеме на фиг.4.
На схеме по фиг.4 синтезатора зондирующего сигнала 8 приняты следующие обозначения:
39 - первый генератор ЛЧМ сигнала (ГЛЧМ 1 ),
40- первый фильтр низкой частоты (ФНЧ 1),
41 - третий фазовый детектор (ФД 3),
42 - первый генератор, управляемый напряжением (ГУН 1),
43 - второй балансный смеситель (БСМ 2),
44 -второй направленный ответвитель (НО 2),
45 - второй генератор ЛЧМ сигнала (ГЛЧМ 2),
46 - четвертый фазовый детектор (ФД 4),
47 - второй фильтр низкой частоты (ФНЧ 2),
48 - третий балансный смеситель (БСМ 3),
49 - второй генератор, управляемый напряжением (ГУН 2).
50 - третий направленный ответвитель (НО 3),
51 - первый коммутатор (Ком 1).
Синтезатор зондирующего сигнала 8 (фиг.4) состоит из 2 каналов, каждый из которых содержит генератор линейно-частотно-модулированного сигнала 39 (45), фазовый детектор 41 (46), балансный смеситель 43 (48), направленный ответвитель 44 (50), фильтр низкой частоты 40 (47) и генератор, управляемый напряжением 42 (49), на выход синтезатора зондирующего сигнала 8 через третий коммутатор 51, управляемый внешней командой, проходит сигнал одного из каналов, при этом первый вход синтезатора зондирующего сигнала 8 соединен с первыми (синхронизирующими) входами первого 39 и второго 45 генераторов линейно-частотно-модулированного напряжения, четвертый и пятый входы синтезатора зондирующего сигнала 8 соединены со вторыми входами первого 39 и второго 45 генераторов линейно-частотно-модулированного напряжения соответственно, выход первого генератора линейно-частотно-модулированного напряжения 39 последовательно через третий фазовый детектор 41, первый фильтр низкой частоты 40 и первый генератор управляемый напряжением 42, соединен с входом второго направленного ответвителя 44 первый выход которого через второй балансный смеситель 43 соединен со вторым входом третьего фазового детектора 41, второй выход второго направленного ответвителя 44 через третий коммутатор 51 соединен с выходом синтезатора зондирующего сигнала 8, выход второго генератора линейно-частотно-модулированного напряжения 45 последовательно через четвертый фазовый детектор 46, второй фильтр низкой частоты 47 и второй генератор, управляемый напряжением 49, соединен с входом третьего направленного ответвителя 50, первый выход которого через третий балансный смеситель 48 соединен со вторым входом четвертого фазового детектора 46, второй выход третьего направленного ответвителя 50 соединен с третьим входом третьего коммутатора 51, второй и третий вход синтезатора зондирующего сигнала 8 соединены с первыми входами второго 43 и третьего 48 балансных смесителей соответственно, шестой вход синтезатора зондирующего сигнала 8 соединен с первым (управляющим) входом первого коммутатора 51.
Построение каналов синтезатора зондирующего сигнала 8 на базе систем фазовой автоподстройки частоты (ФАПЧ) позволяет сформировать выходной сигнал с малыми амплитудно-фазовыми шумами. Высокая скорость перестройки частоты выходного сигнала генераторов, управляемых напряжением 42 (49), каждого канала под закон перестройки соответствующего генератора линейно-частотно-модулированного сигнала с обеспечением когерентности обеспечивается высокой частотой сигналов, поступающих на фазовые детекторы каналов. Структура канала на базе ФАПЧ приведена в [5, с.190, рис.4.10, 4.11].
Синхронизатор (С) 11 предназначен для формирования импульсов синхронизации, период повторения которых определяет период модуляции зондирующего непрерывного ЛЧМ сигнала, кода развертки отфильтрованного отраженного сигнала по дальности и кода управления законом временной манипуляции частоты зондирующего сигнала. Синхронизатор 11 выполнен согласно схеме на фиг.5.
На структурной схеме синхронизатора 11 (фиг.5) приняты следующие обозначения:
52 - первая кодовая шина (КШ 1),
53 - первый счетчик (СИ 1),
54 - первый триггер (Тг 1),
55 вторая кодовая шина (КШ 2),
56 - второй счетчик (СИ 2),
57 - третий счетчик (СИ 3).
На схеме синхронизатора 11 (фиг.5) вход синхронизатора 11 соединен с первыми (счетными) входами первого 53 и второго 56 счетчиков, выход переноса первого счетчика 53 через первый триггер 54 соединен с вторым (установочным) входом второго счетчика 56, второй выход первого триггера 54 соединен со вторым (установочным) входом первого счетчика 53, счетным входом третьего счетчика 57 и является вторым выходом синхронизатора 11, первый выход (выход переноса) второго счетчика 56 соединен со вторым входом первого триггера 54, выход первой кодовой шины 52 соединен с третьим входом первого счетчика 53, выход второй кодовой шины 55 соединен с третьим входом второго счетчика 56, выход третьего счетчика 57 является первым выходом синхронизатора 11, выходной код со второго выхода второго счетчика 56 поступает на третий выход синхронизатора 11.
Усилители доплеровской частоты 19 и 20 аналогичны и являются частью приемного тракта. Усилители 19 и 20 осуществляют частотную фильтрацию отраженного сигнала в расчетной рабочей зоне задержек и доплеровских сдвигов.
Частотная характеристика усилителей доплеровских частот 19 и 20 для обеспечения работы приемника в широком динамическом диапазоне имеет наклон 12 дБ/октава в сторону низких частот, кроме того, для подавления сигналов от Земли, принимаемых по главному лучу, имеет управляемую внешним кодом частоту режекции.
Усилители доплеровской частоты (УДЧ) 19 и 20 выполнены по схеме, приведенной на фиг.6, на которой обозначено:
58 - аналоговый фильтр с цифровым управлением (АФЦУ),
59 - управляемый аналоговый аттенюатор (УАА),
60 - третий фильтр низкой частоты (ФНЧ 3).
На схеме усилителя доплеровской частоты (УДЧ) на фиг.6 второй вход УДЧ последовательно через аналоговый фильтр с цифровым управлением 58, управляемый аналоговый аттенюатор 59 и третий фильтр низкой частоты 60 соединен с выходом УДЧ, первый вход УДЧ соединен с первым входом аналогового фильтра с цифровым управлением 58, третий вход УДЧ соединен со вторым входом управляемого аналогового аттенюатора 59.
Примером реализации аналогового фильтра с цифровым управлением (АФЦУ) 58 с завалом усиления в сторону низких частот 12 дБ/октава и дополнительно управляемой частотой режекции является фильтр, состоящий из последовательно соединенных фильтра высокой частоты и режекторного фильтра, управляемых по частоте общим цифровым кодом частоты настройки. Фильтр высокой частоты представляет RC цепочку, нижняя частота полосы пропускания которого перестраивается регулировкой управляемого внешним кодом настройки резистора.
Перестраиваемый по частоте режекторный фильтр может быть выполнен по схеме [4, с.65...67, рис 7.5]. Перестраиваемым элементом фильтра является управляемый кодом резистор, который может быть выполнен на базе параллельного соединения весовых резисторов через управляемые разрядами кода ключи типа 564 КТЗ.
Управляемый аналоговый аттенюатор 59 может быть выполнен как резистивно-диодный делитель, выходное напряжение которого не линейно зависит от входного сигнала делителя и соответствует требуемому закону регулировки. Аналогичный управляемый аналоговый аттенюатор (линеаризатор) применен в схеме АРУ измерителя толщины морского льда А-038 [9, л.20/2] и в блоке ДР1-363И [10, л.13].
Две амплитудно-частотные характеристики (АЧХ) усилителей доплеровских частот 19 и 20 приведены на фиг.7 для двух частот режекции fудч1 и fудч2, задаваемых внешним цифровым кодом. Ось абсцисс - частота (масштаб логарифмический), ось ординат - ослабление, выраженное в дБ.
На фиг.8 приведен вариант построения блока доплеровских фильтров 22 и 23, на которой приняты следующие обозначения:
61 - первая схема И, (И 1),
62 - второй триггер, (Тг 2),
63 - четвертый счетчик, (СИ 4),
641...64N - первый, ... N-й доплеровские фильтры,
651...65N - первое ... N-oe постоянное запоминающее устройство (ПЗУ1) ... (ПЗУN),
661...66N - первый умножитель первого доплеровского фильтра (Умн 11)... первый умножитель N-го доплеровского фильтра (Умн 1N),
671...67N - второй умножитель первого доплеровского фильтра (Умн 21) ... второй умножитель N-го доплеровского фильтра (Умн 2N),
681...68N - второй интегратор первого доплеровского фильтра (Инт 21) ... второй интегратор N-го доплеровского фильтра (Инт 2N),
691...69N - третий интегратор первого доплеровского фильтра (Инт 31) ... третий интегратор N-го доплеровского фильтра (Инт 3N).
70 - вторая схема И, (И 2),
71 - аналого-цифровой преобразователь (АЦП).
На схеме блока доплеровских фильтров (БДФ) на фиг.8 второй вход БДФ соединен с вторым входом аналого-цифрового преобразователя (АЦП) 71, выход которого соединен с первыми входами первых умножителей 661...66N и первыми входами вторых умножителей 671...67N, выходы первых 661...66N и вторых умножителей 671...67N через соответствующие вторые 681...68N и третьи интеграторы 691...69N соединены с первым... N-м выходом БДФ, первый вход БДФ соединен с первыми входами АЦП 71, второй схемы И 70 и вторым входом второго триггера 62, выход второй схемы И 70 соединен с первым счетным входом четвертого счетчика 63, первыми входами интеграторов 681...68N и 691...69N выход четвертого счетчика 63 соединен с входами с первого по N-й ПЗУ 651...65N, первые выходы которых соединены соответственно со вторыми входами первых умножителей 661... 66N, вторые выходы ПЗУ 651...65N соединены соответственно со вторыми входами вторых умножителей 671...67N, третий вход БДФ соединен с первым входом второго триггера 62, первым входом первой схемы И 61 и вторым входом второй схемы И 70, выход второго триггера 62 через первую схему И 61 соединен со вторым входом четвертого счетчика 63, с третьими входами вторых 681...68N и третьих интеграторов 691...69N.
Блок объединения квадратур 26 по квадратурным составляющим входного сигнала вычисляет его мощность. Вариант построения блока объединения квадратур 26 приведен на фиг.9, где обозначено:
72 - третий умножитель (Умн 3),
73 - четвертый умножитель (Умн 4),
74 - первый сумматор (Сум 1).
На схеме блока объединения квадратур 26 (фиг.9) квадратурная косинусная составляющая сигнала, поступающая на вход блока объединения квадратур 26, подключена к первому и второму входам третьего умножителя 72, синусная квадратурная составляющая сигнала, поступающая с входа блока объединения квадратур 26 подключена к первому и второму входам четвертого умножителя 73, выходы умножителей 72 и 73 соединены соответственно с первым и вторым входом первого сумматора 74, выход которого является выходом блока объединения квадратур 26.
Дискриминатор угла 27 выполняет операцию скалярного произведения квадратурных сигналов, приходящих на его вход с блоков опроса доплеровских фильтров суммарного 24 и разностного 25 каналов.
Вариант построения дискриминатора угла (ДУ) 27 приведен на фиг.10, где приняты следующие обозначения:
75 - пятый умножитель (Умн 5),
76 - шестой умножитель (Умн 6),
77 - второй сумматор (Сум 2).
На схеме дискриминатора угла 27 (фиг.10) квадратурная косинусная составляющая сигнала, поступающая на первый вход дискриминатора угла 27, подключена к первому входу пятого умножителя 75, вторая синусная квадратурная составляющая сигнала, поступающая на первый вход дискриминатора угла 27, подключена к первому входу шестого умножителя 76, квадратурная косинусная составляющая сигнала, поступающая на второй вход дискриминатора угла 27, подключена к второму входу пятого умножителя 75, вторая синусная квадратурная составляющая сигнала, поступающая на второй вход дискриминатора угла 27, подключена к второму входу шестого умножителя 76, выходы пятого 75 и шестого 76 умножителей соединены соответственно с первым и вторым входами второго сумматора 77, выход которого является выходом дискриминатора угла 27.
Эпюры, поясняющие временной цикл работы блоков доплеровских фильтров 22, 23 и блока первичной обработки 34 приведены на фиг.11, где обозначено:
78 - такт, задаваемый возбудителем 9 на третьем выходе, Тв (определяет такт выборки сигнала в АЦП блоков доплеровских фильтров 22 и 23, такт развертки сигнала на выходах блоков опроса 24 и 25, такт приема сигналов в устройстве обработки информации 12),
79 - импульс синхронизации, выдаваемый синхронизатором 11 на втором выходе (Тлчм - интервал развертки пилы ЛЧМ сигнала, Тбо - интервал возврата пилы ЛЧМ сигнала в исходное состояние, в течение этого интервала производится расчет настроек блоков и выдаются на них необходимые коды с устройства обработки информации 12),
80 - задержанный на один такт импульс синхронизации, формируемый вторым триггером 62 (фиг.8),
81 - импульс сброса интеграторов 68 и 69, выдаваемый второй схемой И 70 (фиг.8),
82 - задержанный на NTв импульс синхронизации, формируемый первым сдвиговым регистром 85 (фиг.12),
83 - пачка импульсов сдвига, синхронизирующая прием реализации сигналов с блока объединения квадратур 26 и выхода делителя 28 в накопители блока первичной обработки 34 формируется третьей схемой И 84 (фиг.12).
На схеме блока первичной обработки (БПО) 34 (фиг.12) приняты следующие обозначения:
84 - третья схема И (ИЗ),
85 - первый сдвиговый регистр (СДР 1),
86 - пороговый обнаружитель (ПО),
87 - второй сдвиговый регистр (СДР 2),
88 - первый накопитель (H1),
89 - угловой селектор (УС),
90 - четвертая схема И (И4),
91 - пятая схема И (И5),
92 - делитель частоты (ДЧ),
93 - дешифратор (ДС).
На схеме блока первичной обработки (БПО) 34 (фиг.12) второй вход блока первичной обработки 34 соединен с вторым входом третьей схемы И 84, входом делителя частоты 92 и первым входом первого сдвигового регистра 85, выход которого соединен с третьим входом третьей схемы И 84, третий вход блока первичной обработки 34 соединен с первым входом третьей схемы И 84 и вторым (сдвиговым ) входом первого сдвигового регистра 85, первый вход блока первичной обработки 34 через последовательно соединенные пороговый обнаружитель 86 и второй сдвиговый регистр 87 соединен с первым входом четвертой схемы И 90, выход третьей схемы И 84 соединен с первыми входами порогового обнаружителя 86, первого накопителя 88 и первым входом пятой схемы И 91, выход пятой схемы И 91 соединен с первыми входами углового селектора 89 и вторым входом второго сдвигового регистра 87, выход углового селектора 89 через четвертую схему И 90 соединен с первым выходом блока первичной обработки 34, выход первого накопителя 88 соединен с вторым входом углового селектора 89, выход делителя частоты 92 через дешифратор сигнала 93 соединен с вторым входом пятой схемы И 91 и третьим выходом блока первичной обработки 34, четвертый вход блока первичной обработки 34 соединен с вторым входом первого накопителя 88.
Блок-схема алгоритма работы блока вторичной обработки 33 приведена на фиг.13, на которой приняты следующие обозначения:
АСв - команда ввода кода начального положения сектора сканирования по углу в привод антенны 29,
PC - разрешение считывания (формируется на втором выходе блока первичной обработки 34),
КО - команда включения обзора (КО=1), при выключении обзора КО=0,
P(m,j)- развертка отметок ячеек дальность-угол азимута, в которых обнаружена цель (формируется на первом выходе блока первичной обработки 34 ),
m - текущий код дальности, выдаваемый синхронизатором 11 на блок вторичной обработки 33,
j - текущий код азимутального угла направления РСН относительно оси ЛА,
jН - код нижней границы углового положения сектора сканирования (режим обзора), с которой начинается обзор сцены,
jk код конечного (верхнего) положения сектора сканирования при обзоре по углу азимута,
V - скорость ЛА,
α - угол сноса ЛА.
Пороговый обнаружитель 86 выполнен по известной схеме (фиг 14), описанной в [7, рис.2.39, с.189 ] и на которой приняты следующие обозначения:
941...94k - сдвиговые регистры СДР 31...СДР 3k,
95 - четвертый сдвиговый регистр СДР 4,
96 - третий сумматор (Сум 3),
97 - четвертый сумматор (Сум 4),
98 - цифровой компаратор (ЦК).
Согласно фиг.14 второй вход порогового обнаружителя 86 соединен с первым входом сдвигового регистра СДР 31 (поз 941), сдвиговые регистры СДР 31...СДР 3k (поз.941...94k) соединены последовательно, выходы сдвиговых регистров СДР 31...СДР 3k (поз.941...94k) подключены к "k" входам третьего сумматора 96, выход которого соединен с первым входом четвертого сдвигового регистра 95, выходы с первого по L-тый четвертого сдвигового регистра 95 подключены к одноименным входам четвертого сумматора 97, выход которого соединен с вторым входом цифрового компаратора 98, первый вход цифрового компаратора 98 соединен со средним (L+1)/2 выходом четвертого сдвигового регистра 95, выход цифрового компаратора 98 является выходом порогового обнаружителя 86.
Структурная схема варианта накопителя (Н) 88 приведена на фиг.15, на которой приняты следующие обозначения:
991...99р - сдвиговые регистры СДР 51...СДР 5р,
100 - пятый сумматор (Сум 5).
На схеме накопителя 88 (фиг.15) второй вход накопителя 88 через последовательно соединенные сдвиговые регистры СДР 51...СДР 5р (поз 991...99р) подключен к второму выходу накопителя 88, выходы сдвиговых регистров СДР 51...СДР 5р (поз 991...99р) соединены с р входами пятого сумматора 100, выход которого является первым выходом накопителя 88, первый вход накопителя 88 соединен с вторыми (сдвиговыми) входами сдвиговых регистров СДР 51...СДР 5р (поз 991...99р).
Угловой селектор (УС) 89 предназначен для формирования отметки совпадения РСН с направлением на цель и выполнен по схеме [8], приведенной на фиг.16, на которой приняты следующие обозначения:
1011...101q - сдвиговые регистры (СДР 61...СДР 6q),
1021...102q- весовые усилители (ВУ 11...ВУ 1q),
103 - шестой сумматор (Сум 6),
104 - пороговое решающее устройство (ПРУ).
На схеме углового селектора 89 (фиг.16) первый вход сдвигового регистра СДР 61 (поз. 1011) является вторым входом углового селектора 89, сдвиговые регистры СДР 61...СДР 6q, (поз. 1011...101q) соединены последовательно, выходы q сдвиговых регистров СДР 61...СДР 6q (поз. 1011...101q) через соответствующие весовые усилители ВУ11...ВУ 1q (поз. 1021...102q) подключены к q входам шестого сумматора 103, выход которого через пороговое решающее устройство 104 соединен с выходом углового селектора 89, первый вход углового селектора 89 соединен с вторыми входами q сдвиговых регистров СДР 61...СДР 6q (поз. 1011...101q).
Антенный блок (АБ) 1 может быть построен в виде зеркала с 4-рупорным облучателем, соединенный волноводами с суммарно-разностным преобразователем (СРП) 2.
Суммарно-разностный преобразователь (СРП) 2 может быть построен на основе волноводных Т-мостов.
Антенный переключатель (АП) 3 может быть выполнен, например, в виде трехплечевого ферритового Y - циркулятора.
Усилитель мощности (Ум) 4 может быть реализован в зависимости от требуемой мощности и полосы усиливаемых частот на основе амплитрона, лампы бегущей волны или полупроводникового прибора [5, с 19...52, 103...107,144.].
Возбудитель (В) 9 формирует четыре непрерывные опорные частоты, каждая из которых может быть получена либо методом цифрового синтеза, либо путем прямого умножения частоты кварцевого генератора в целое число раз. Теория, расчет и варианты построения цифровых синтезаторов частоты приведены в [5].
Генератор манипулирующих последовательностей (ГМП) 10 может быть построен по схеме синтезатора частоты [5, рис.1.17, с.35], перестраиваемого кодом на «k» заранее известных расчетных частот, где k - число не когерентно накапливаемых реализаций сигнала. Между входом генератора манипулирующих последовательностей 10 и управляющим входом синтезатора находится преобразователь кода, выполненный на постоянном запоминающем устройстве (ПЗУ).
Вариантом измерителя скорости и угла сноса (ИСС) 13 может быть доплеровский измеритель скорости и угла сноса [6]
Блок вторичной обработки 33, входящий в устройство обработки информации 12, может быть построен на базе цифровой вычислительной машины, работа которой состоит в последовательном решении задач, представленных на блок-схеме алгоритма (фиг.13).
Согласно изобретению устройство (фиг.1) работает следующим образом. Синтезатор зондирующего сигнала (СЗС) 8 формирует непрерывный сигнал, представляюий комбинацию из 2-х непрерывных ЛЧМ сигналов с частотами f1 и f2, манипулированных во времени сигналом, приходящим с генератора манипулирующих последовательностей (ГМП) 10 на шестой вход синтезатора зондирующего сигнала 8. Частота выходного сигнала СЗС 8 после умножителя частоты (УЧ) 7 увеличивается в n раз и имеет вид, приведенный на фиг.2.
При этом
f1(t)=n(fоп1+(k3·t+fн1))=F1+fлчм1(t),
f2(t)=n(fоп2+(k3·t+fн2))=F2+fлчм2(t),
где
f1(t) и f2(t) -закон изменения частоты первого и второго ЛЧМ сигналов на выходе умножителя частоты 7,
n - коэффициент умножения частоты (целое число) в умножителе частоты 7,
fоп1=k1·f0 - первая опорная частота, приходящая на второй вход СЗС 8 с первого выхода возбудителя 9,
fоп2=k2·f0 - вторая опорная частота, приходящая на третий вход СЗС 8 со второго выхода возбудителя 9,
f0 - опорная частота на четвертом выходе возбудителя 9, умножением (делением) которой получают другие опорные частоты в возбудителе 9 на выходах с первого по третий,
k1 и k2 - множители - целые числа,
k3 - коэффициент, определяющий крутизну ЛЧМ сигнала,
fн1 - задаваемый начальный частотный сдвиг при формировании частоты f1, приходит совместно со значением k3 в виде кода на четвертый вход СЗС 8 с четвертого выхода УОИ 12,
fн2=fн1+Δfсм/2n - задаваемый начальный частотный сдвиг при формировании частоты f2, приходит совместно со значением k3 в виде кода на пятый вход СЗС 8 с третьего выхода УОИ 12,
Δfсм - расчетная разность в доплеровских сдвигах отраженных сигналов на частотах f1 и f2,
t - текущее время.
Непрерывный сигнал с выхода умножителя частоты 7 поступает на коммутируемый фильтр передачи (КФ-П) 6, управляемый, также как и синтезатор зондирующего сигнала 8, сигналом с первого выхода генератора манипулирующих последовательностей 10, при этом частоты f1 и f2 согласованно проходят на его выход, далее через последовательно включенные направленный ответвитель 5, усилитель мощности 4, антенный переключатель 3 и суммарно-разностный преобразователь 2 сигнал поступает на антенный блок 1 и излучаются им в сканируемом направлении через все лучи. Отраженный, задержанный на время tr, суммарный сигнал (фиг.2) через последовательно соединенные антенный блок 1, суммарно-разностный преобразователь 2, антенный переключатель 3 поступает на первый вход коммутируемого фильтра суммарного сигнала (КФ-С) 14. Разностный отраженный сигнал снимается со второго выхода суммарно-разностного преобразователя (СРП) 2 и поступает на первый вход коммутируемого фильтра разностного канала (КФ-Р) 15.
Управление коммутируемыми фильтрами суммарного и разностного каналов 14 и 15 производится со второго (инверсного) выхода генератора манипулирующих последовательностей (ГМП) 10, а коммутируемого фильтра передачи 6 с первого выхода генератора манипулирующих последовательностей 10, поэтому во время прохождения сигнала через коммутируемый фильтр передачи 6 частоты f1, через коммутируемые фильтры 14 и 15 проходит отраженный сигнал на частоте f2 и наоборот.
Коммутируемые фильтры 6, 14, 15 аналогичны. Схема фильтров приведена на фиг.3. Управление коммутаторами 35 и 48 производится сигналом, приходящим на второй вход коммутируемого фильтра 6 (14, 15). Схема включения коммутаторов обеспечивает прохождение сигнала с входа коммутируемого фильтра 6 (14, 15) на его выход только либо по верхней ветви на частоте настройки f1, либо по нижней ветви на частоте настройки f2 через фильтры 36 и 37 соответственно.
Частоты манипуляции несущих частот f1 и f2 генератора манипулирующих последовательностей 10 последовательно с тактом импульса синхронизации (фиг.11, поз.79) переключаются кодом синхронизатора 11. Число кодов равно принятому расчетному числу не когерентно накапливаемых реализаций сигнала k. Каждая реализация сигнала принимается на интервале Тлчм (фиг.11, поз.79) при фиксированном значении кода на первом выходе синхронизатора 11. Частота повторения манипулирующих последовательностей fмн переменная, выбираемая больше удвоенного максимального частотного сдвига отраженного сигнала относительно зондирующего. Данное построение вызвано тем, что прием отраженных сигналов, при совпадении во времени задержанного закона манипуляции частот с законом манипуляции частот излучаемого невозможен. Переключение частот манипуляции несущих частот зондирующего сигнала, обеспечивает возможность приема любого задержанного в расчетной зоне дальностей сигнала на большинстве других (k-1) манипулирующих последовательностях из общего числа k.
Действительно, из физических соображений ясно, что при выбранной начальной частоте манипуляции fмн0 и допустимости потерь мощности принимаемого сигнала на 3 дБ для просмотра «мертвой» зоны, равной 1/2 fмн0, необходимо обеспечить задержку закона манипуляции отраженного сигнала относительно излучаемого на 1/2 fмн0, что обеспечивается уменьшением периода манипулирующей функции на 1/2nfмн0, где n - коэффициент неоднозначности выбранного периода манипуляции по дальности. Отсюда следует, что диапазон перестройки, определяемый для минимального n=1, лежит в пределах от fмн0 до 3/2 (fмн0), а шаг возможной перестройки синтезатора частоты, используемого в качестве генератора манипулирующих последовательностей, равен fмн0/2n.
Суммарные и разностные сигналы с выходов коммутируемых фильтров 14 и 15 усиливаются двухканальным усилителем высокой частоты (УВЧ) 30 и поступают на 2-канальный балансный смеситель (БСМ) 31, на гетеродинный вход которого (третий вход 2-канального приемника 16) приходит сигнал с направленного ответвителя 5, при этом на выходах 2-канального балансного смесителя 31 получаем частоты
Fпр1=f1(t)-f2(t)+fr+fд1=fоп-Δfсм/2+fr+fд1,
Fпр2=f1(t)-f2(t)-fr-fд2=fоп-Δfсм/2-fr-fд2,
где
fоп=(k1-k2) n f0, частота, формируемая возбудителем 9 на четвертом выходе, которая поступает на первые входы (входы опорного сигнала) фазовых детекторов (ФД-С и ФД-Р) суммарного 17 и разностного 18 каналов,
fr - разность частот зондирующего и отраженного сигналов, связанная с задержкой сигнала tr,
fr=Δfдевtr/Тлчм=2ΔfдевR/сТЛЧМ,
Тлчм - интервал формирования пилы ЛЧМ сигнала (фиг.11, поз. 79),
Δfдев - девиация частот сигналов с частотами f1 и f2 на интервале Тлчм,
R - дальность до облученной цели,
с - скорость света,
fд1 и fд2 доплеровские сдвиги частоты отраженных сигналов на частотах f1 и f2,
fдi=fi2Vcos (B+α)/c,
V - скорость летательного аппарата относительно Земли,
В - угол визирования РСН, отсчитанный от оси ЛА,
α - угол сноса ЛА,
Δfсм=fд1-fд2.
С учетом подстановки fд2 через значения Δfсм и fд1 в выражение для Fпр1 получим
Fпp1=fоп+(fr+fд2+Δfсм/2),
Fnp2=fоп-(fr+fд2+Δfсм/2).
После усиления их в 2-канальном усилителе промежуточной частоты 33 и последующем фазовом детектировании в фазовых детекторах суммарного 17 и разностного 18 каналов сигналы суммы и разности переносятся на одну и ту же видео частоту, равную
fв=fr+fд2+Δfсм/2,
и соответствуют одним и тем же разрешаемым участкам цели (поверхности). В качестве опоры на первые входы фазовых детекторов 17 и 18 с четвертого выхода возбудителя 9 приходит сигнал с частотой fоп. Далее сигналы суммы и разности поступают на усилители доплеровских частот 19 и 20, где они усиливаются и фильтруются в области частот, соответствующей диапазону рабочих задержек сигнала с дополнительным расширением, равным диапазону доплеровских сдвигов отраженных сигналов fд1 и fд2.
Структурная схема усилителей доплеровских частот (УДЧ)19 и 20 приведена на фиг.6. Амплитудно-частотная характеристика (АЧХ) усилителя доплеровских частот приведена на фиг.7 и имеет подъем 12 дБ/октаву в сторону высоких частот, определяемый аналоговым фильтром с цифровым управлением 58, учитывающий уменьшение мощности отраженного сигнала на 12 дБ при увеличении задержки сигнала до цели в 2 раза. За границей рабочей полосы сигнала АЧХ усилителя доплеровских частот имеет быстроспадающий спад, формируемый АЧХ последовательно стоящего третьего фильтра низкой частоты (ФНЧ 3) 60. Для обеспечения работы стоящим за усилителем доплеровских частот 19 (20) блоком доплеровских фильтров 22 (23) в требуемом динамическом диапазоне входных сигналов между аналоговым фильтром с цифровым управлением 58 и третьим фильтром низкой частоты 60 включен управляемый аналоговый аттенюатор (УАА) 59, к которому подведен аналоговый сигнал АРУ со схемы АРУ 21. В качестве входного сигнала для схемы АРУ является выход третьего фильтра низкой частоты 60 усилителя доплеровских частот суммарного канала 19. Особенностью аналогового фильтра с цифровым управлением 58 в схемах УДЧ 19 и 20 является то, что он управляем кодом режектируемой частоты (fудч), приходящим с первого выхода устройства обработки информации 12 на его первый вход. При этом на заданной частоте режекции fудч=(fд1+fд2)/2 помеховые сигналы от Земли, приходящие по главному лучу, существенно ослабляются за счет провала в АЧХ аналогового фильтра с цифровым управлением 58 (смотри фиг.7). Подъем АЧХ на частотах выше частоты режекции (f>fудч) определяется выражением
K(f)=K0+12lg2(f-fуач),
где К0 - усиление тракта суммарного и разностного каналов на частоте режекции.
Суммарные и разностные сигналы с выходов УДЧ 19 и 20 поступают на соответствующие блоки доплеровских фильтров 22 и 23, где происходит узкополосная доплеровская фильтрация на частотах
fm=m/2 Ткг,
где 
Ткг=Тлчм-2Rмах/с,
Ткг - время когерентного накопления сигнала, соответствующее прямому ходу пилы ЛЧМ сигнала Тлчм.
На выходах блоков доплеровских фильтров суммарного 22 и разностного 23 каналов получают квадратурные составляющие сигнала на частотах fm, соответственно сигналов с дальностей
Rm=с Tлчмfm/2Δfдев.
Вариант построения блоков доплеровских фильтров 22 и 23 приведен на фиг.8 и будет рассмотрен ниже.
Опросом блоков доплеровских фильтров суммарного 22 и разностного 23 каналов через блоки опроса (БО-С) 24 и (БО-Р) 25 на первый и второй вход дискриминатора угла (ДУ) 27 приходят соответствующие квадратурные сигналы целей с разверткой по частоте (дальности). Последовательность опроса фильтров блока доплеровских фильтров 22 и 23 задается кодом синхронизатора 11, приходящим на первые входы блоков опроса суммарного 24 и разностного 25 каналов.
Дискриминатор угла (ДУ) 27 построен по схеме, приведенной на фиг.10, и выполняет скалярное умножение суммарного и разностного сигналов, приходящих в квадратуре с выходов блоков опроса 24 и 25.
Выход дискриминатора угла 27 для m-ной опрашиваемой частоты равен
Еm=CΣ(m)*СΔ(m)+SΣ(m)*SΔ(m)=|Σm|*|Δm|cosϕm,
где CΣ(m) и СΔ(m) - косинусные составляющие сигналов на выходах блоков
опроса 24 и 25 соответственно,
SΣ(m) и SΔ(m) - синусные составляющие сигналов на выходах блоков опроса
24 и 25 соответственно,
|Σm| - модуль суммарного сигнала на m-ной опрашиваемой частоте,
|Δm| - модуль разностного сигнала на m-ной опрашиваемой частоте,
ϕm - угол между векторами сигналов суммарного и разностного каналов на выходах блоков опроса 24 и 25 для m-ной опрашиваемой частоты (0, π).
Для дальнейшего однозначного соответствия измеряемого углового отклонения цели от РСН делителем 28 производится нормировка сигнала с выхода дискриминатора угла 27 по мощности сигнала в суммарном канале на той же m-ной частоте (получение сигнала ошибки по углу):
γm=Еm/|Σm|2=|Δm|cosϕm/|Σm|.
Вычисление мощности |Σm|2 производится блоком объединения квадратур (БОК) 26, структура которого приведена на фиг.9. Выход блока объединения квадратур 26 соединен с первым входом делителя 28. При этом выходной сигнал блока объединения квадратур 26 равен:
|Σm|2=CΣ 2(m)+SΣ 2(m).
Связь пеленгационного отсчета γm, формируемого делителем 28 и поступающего далее на восьмой вход устройства обработки информации 12 с угловым отклонением цели от РСН ΔВm, определяется выражением:
ΔВm=γm·ρ,
где ρ - масштабный коэффициент.
На устройство обработки информации (УОИ) 12 сигнал с блока объединения квадратур 26 поступает в координатах дальность-угол. При этом дальность Rm соответствует номеру m (коду) опрашиваемой частоты, формируемой синхронизатором 11 и поступающего на четвертый вход УОИ 12, а угол между направлением РСН и осью ЛА определяется, с одной стороны, углом между РСН и осью ЛА, приходящим на шестой вход устройства обработки информации 12 со второго (информационного) выхода привода антенны 29, с другой стороны, уточняется пеленгационным отсчетом γm отклонения цели от РСН, который приходит с делителя 28 на восьмой вход устройства обработки информации 12.
Работа (УОИ) 12 происходит в соответствии с алгоритмом (фиг.13) и логическим состоянием импульса синхронизации, приходящим на пятый вход блока первичной обработки 34 со второго выхода синхронизатора 11. Блок первичной обработки 34 производит прием поступающей на него информации и после предварительной обработки выдает в блок вторичной обработки 33 информацию об обнаружении цели (P(m,j)=1) в разрешаемой ячейке (m,j) на первом выходе с сопровождением ее сигналом разрешения считывания (PC) на втором выходе.
Сначала производится включение РЛС после чего блок вторичной обработки 33 (фиг.13) устанавливает начальные условия работы:
код нижней границы сектора сканирования jн,
рассчитывается значение верхней границы сектора сканирования обзора
jk=jo+Δj, где Δj - угловой размер сектора сканирования,
формируется признак включения обзора (КО=1),
выдается на второй вход привода антенны 29 команда АСв=1 ввода кода начального азимутального положения антенны и ее значение jн=jo.
Далее блок вторичной обработки 33 находится в режиме ожидания прихода разрешения съема информации (РС=1) с второго выхода блока первичной обработки 34 (по времени это начало интервала Тбо, фиг 11, поз. 79) на его третий вход. При РС=1 блок вторичной обработки 33 производит прием развертки признака обнаружения цели P(m,j) с первого выхода блока первичной обработки 34. Прием заканчивается при нулевом значении сигнала разрешения считывания (РС=0), приходящем на третий вход блока вторичной обработки 33 с блока первичной обработки 34.
Блок первичной обработки 34 на том же интервале при РС=1 производит:
- накопление реализации сигнала с блока объединения квадратур 26 по всем N дальностям рабочего диапазона в скользящем азимутальном окне из k разверток по дальности, накопление реализации сигнала углового рассогласования целей от РСН, принимаемых на четвертом входе блока первичной обработки 34 по всем N дальностям в таком же азимутальном окне из k разверток по дальности,
- обнаружение сигнала на накопленной реализации с блока объединения квадратур 26,
- дает развертку сигнала обнаружения цели P(m,j) в скользящем по дальности и азимуту окне размером 2s*2q ячеек (s и q - максимальное число ячеек дальности и азимута, занимаемых целью соответственно). Для не нулевых значений P(m,j) координаты (m,j) соответствуют положению обнаруженной разрешаемой цели или ее части.
После окончания приема P(m,j), когда РС=0, блок вторичной обработки 33 в соответствии с алгоритмом фиг.13 считывает информацию о скорости V и угле сноса α, приходящую к нему на четвертый и пятый входы с первого и второго выходов измерителя скорости и угла сноса 13 соответственно. Кроме того, блок вторичной обработки 33 считывает значение текущего кода азимутального угла j, приходящего на его шестой вход с второго (информационного) выхода привода антенны 29, после этого вычисляет частоты настройки синтезатора зондирующего сигнала 8 (fн2) и частоты режекции (fудч) для усилителей доплеровских частот 19 и 20 путем последовательного расчета выражений:
f1≅n(k1f0+fн1),
f2≅n(k2f0+fн1),
fд1(j)=2f1Vcos(B(j)+α)/c,
fд2(j)≅2f2Vcos(B(j)+α)/c,
Δfсм=fд1-fд2,
fн2=fн1+Δfсм/2n,
fудч=(fд1+fд2)/2,
где V - скорость летательного аппарата относительно Земли,
B(j) - угол визирования РСН, отсчитанный от оси ЛА, приходящий в виде кода j на шестой вход блока вторичной обработки 33 с второго выхода привода антенны 29 через шестой вход УОИ 12,
α - угол сноса ЛА,
fн1 - постоянная частота, выбранная из соображений удобства реализации ГЛЧМ 39.
Значения настроек fн1 и fн2 и крутизны ЛЧМ сигнала k3 выдаются с четвертого и пятого выходов блока вторичной обработки 33, соответственно на четвертый и пятый входы синтезатора зондирующего сигнала 8, значение fудч выдается с шестого выхода блока вторичной обработки 33 на первые входы усилителей доплеровской частоты 19 и 20.
Далее блок вторичной обработки 33 анализирует (фиг.13) текущее значение азимутального угла направления антенны j и сравнивает его с расчетным конечным jk. При j≤jk. (поворот антенны не достиг конца сектора сканирования) продолжается обзор сцены в том же секторе сканирования от jн до jk, но блок вторичной обработки 33 переходит в режим ожидания момента, когда вновь появится разрешение съема информации (РС=1), при этом цикл приема очередного P(m,j), V, α, j, расчета и выдачи fн1, fн2, fудч, k1 в соответствующие узлы повторяется. При j>jk (поворот антенны достиг конца сектора сканирования) признак обзора изменяется на КО=0 (окончание обзора) и выключается излучение зондирующего сигнала РЛС. После этого блок вторичной обработки 33 уточняет значения координат обнаруженных целей, где P(m,j)=1
mц(j)=m-s-mсм(j),
jц=j-p.
С учетом цены младшего разряда кода дальности m, равного
c Тлчм/4ТкгΔfдев,
первая выдаваемая координата цели по дальности равна
Rц=c Тлчмmц(j)/4ТкгΔfдев.
Вторая координата - азимут цели, выдаваемая в систему управления ЛА, равна
Bц=jцΔаз,
где m- значение кода дальности, где P(m,j)=1,
j - значение кода азимутального угла, где P(m,j)=1,
mсм(j)=]2fудч(j)Ткг[, - код смещения дальности, вызванный доплеровским сдвигом сигнала и Δfсм,
][ - целая часть числа,
s - параметр размера окна по дальности, в котором определяется наличие цели в блоке первичной обработки 33,
р - параметр размера окна по углу азимута, в котором определяется наличие цели в блоке первичной обработки 33,
Ткг - константа, определяемая полосой пропускания доплеровских фильтров (временем когерентного накопления),
jц - код азимутального угла направления РСН антенного блока 1 относительно оси ЛА, выдаваемый приводом антенны 29 со второго выхода на шестой вход блока вторичной обработки 33 через шестой вход УОИ 12,
Δаз - цена младшего разряда кода азимутального угла.
Далее, согласно алгоритму фиг.13, блок вторичной обработки 33 выдает предварительно измеренные координаты целей в систему управления для дальнейшей классификации и выбора цели для сопровождения и переходит в режим ожидания, когда придет новая команда включения РЛС с заданием новых условий.
Для синхронного приема информационного сигнала с блока объединения квадратур 26 и выдачи развертки сигнала обнаружения по дальности на первый (сдвиговый) вход порогового обнаружителя 86 приходят пачки из N сдвиговых импульсов (фиг.11, поз.83) с периодом импульсов синхронизации (фиг.11, поз.79). Формирование пачек из N импульсов сдвига производится схемой, состоящей из первого сдвигового регистра 85, обеспечивающего задержку импульса синхронизации на N периодов импульсов Тв (фиг.11, поз.82), и третьей схемы И 84, на которую приходит собственно импульс синхронизации (второй вход), он же, задержанный на N импульсов сдвига (третий вход), и тактовые импульсы, приходящие на первый вход (фиг.11, поз 78). Благодаря выбранной логике и подключению синхронизирующего импульса через инвертирующий (второй) вход второй схемы И 84 на ее выходе имеем пачку из N импульсов в первой половине интервала Тбо (фиг.11, поз.83).
Вариант построения схемы порогового обнаружителя 86 приведен на фиг.14. Работа порогового обнаружителя 86 происходит следующим образом.
Реализация развертки сигнала с блока объединения квадратур 26 поступает на первый вход сдвигового регистра СДР 31 (поз.941), являющегося первым в k последовательно соединенных сдвиговых регистрах СДР 31...СДР 3k. Число k равно числу накапливаемых на скользящем интервале реализации. Каждый из регистров рассчитан на последовательную скользящую запись N параллельных n-разрядных кодов, подаваемых на его информационный первый вход. Число N равно числу анализируемых ячеек дальности на развертке дальности (числу опрашиваемых блоком опроса 24 доплеровских фильтров 22). Такт приема информации в сдвиговые регистры с СДР 31 по СДР 3k (поз.941...94k ) синхронизирован с тактом поступления информации с блока объединения квадратур 26 и обеспечивается поступлением на вторые входы сдвиговых регистров с СДР 31 по СДР 3k (поз.941...94k) пачек из N импульсов сдвига. В результате суммирования информации с выходов СДР 31...СДР 3k (поз.941...94k) на выходе третьего сумматора 96 имеем развертку сигналов на N дальностях, накопленных по k реализациям, поступающую на первый вход четвертого сдвигового регистра 95. С первого по L-й выходы четвертого сдвигового регистра 95 (L больше удвоенного максимального радиального размера цели) подключены к одноименным входам четвертого сумматора 97, на выходе которого формируется скользящий порог, поступающий на второй вход цифрового компаратора 98. Цифровой компаратор 98 сравнивает сигнал с (L+1)/2 - центрального выхода четвертого сдвигового регистра 95 - со взвешенным значением порога. При превышении взвешенного порога (обнаружении сигнала) на выходе цифрового компаратора выдается логическая единица, поступающая на выход порогового обнаружителя.
С выхода порогового обнаружителя 86 сигнал обнаружения поступает на второй сдвиговый регистр 87 блока первичной обработки 34 для задержки с целью согласования времени прихода сигнала обнаружения на четвертую схему И 90 с задержкой сигнала в угловом селекторе 89.
Параллельно решению задачи обнаружения сигнала цели в блоке первичной обработки 34 производится формирование единичных отметок совпадения сканирующего направления РСН антенного блока 1 с направлением на цель. Первоначально реализации развертки углового отклонения целей от РСН по дальности, приходящие с делителя 28 на четвертый вход блока первичной обработки 34, не когерентно накапливаются на скользящем интервале из k реализации в первом накопителе 88 (фиг.15). Как и в пороговом обнаружителе 86, в первом накопителе 88 производится накопление сигнала во всем рабочем диапазоне N дальностей. Синхронный прием реализации углового отклонения целей от РСН по дальности в первый накопитель 88 и выдачу развертки результата накопления по дальности на угловой селектор 89 обеспечивается выходными импульсами третьей схемы И 84, поступающими на первый вход первого накопителя 88. Выходная реализация развертки углового отклонения целей от РСН по дальности с выхода первого накопителя 88 поступает на угловой селектор 89. В режиме обзора выходная информация углового селектора 89 - развертка единичных отметок о совпадении РСН с целью во всем диапазоне рабочих дальностей.
Угловой селектор 89 (фиг.16) формирует отметки совпадения РСН с направлением на цель на каждой дальности. В нем используется дифференциальная корреляционная обработка реализации сигнала угловой ошибки на каждой дальности. Это исключает формирование ложных азимутальных отметок совпадения РСН с целью при приеме сигнала с боковых лепестков диаграммы направленности антенного блока 1. Прием входной информации с первого накопителя 88 и выдача выходной реализации отметок направления на цель по дальности синхронизированы прореженными пачками импульсов сдвига, приходящими на первый вход углового селектора 89 с пятой схемы И 91. Сдвиговые регистры СДР 61...СДР 6q (поз.1011...101q) рассчитаны на скользящий прием сигнала угловой ошибки на N ячейках дальности. Число регистров q соответствует удвоенному размеру пеленгационной характеристики антенного блока 1 в азимутальной плоскости. За счет весового суммирования сигналов с выходов q сдвиговых регистров имеем на выходе шестого сумматора 103 сигнал, близкий к нулю, при совпадении направления РСН с направлением на цель. Этот момент фиксируется пороговым решающим устройством 104, выход которого является выходом углового селектора 89.
Выход углового селектора 89 подключен к второму входу четвертой схемы И 90, на первый вход которой поступает выходной сигнал порогового обнаружителя 86 через второй сдвиговый регистр 87. Задержка сигнала порогового обнаружителя 86 в сдвиговом регистре 87 выбирается равной задержке между появлением нулевого сигнала угловой ошибки на выходе первого накопителя 88 и появлением отметки о совпадении РСН с направлением на цель в угловом селекторе 89. Таким образом, входные сигналы четвертой схемы И 90 соответствуют по дальности и углу одной и той же цели. Выход четвертой схемы И 90 является первым выходом блока первичной обработки 34. Единичное значение сигнала на выходе четвертой схемы И 90 имеет место при совпадении обнаружения сигнала цели и нахождении цели на РСН.
Схема формирования прореженных пачек сдвиговых импульсов состоит из делителя частоты 92, дешифратора 93 и пятой схемы И 91. На делитель частоты 92 приходит импульс синхронизации (фиг.11, поз.79), частота которого делится в q раз. При этом период импульсов на выходе делителя частоты 92 соответствует времени прохода сканирующего луча шага по углу Δаз между азимутальными ячейками. Делитель 92 представляет счетчик импульсов, в котором импульс переноса по обратной связи поступает на установочный вход счетчика и устанавливает код исходного состояния, равный (2n-q-1), где n - разрядность счетчика. С этого состояния до импульса переноса проходит q импульсов, поэтому период импульсов делителя 92 равен q периодам импульсов синхронизации. Дешифратор 93 выделяет одно из состояний делителя 92 и выдает его на второй вход пятой схемы И 91 и на второй выход блока первичной обработки 34 (сигнал разрешения съема информации PC для блока вторичной обработки 33). На первый вход пятой схемы И 91 приходят пачки сдвиговых импульсов с выхода третьей схемы И 84, поэтому на выходе пятой схемы И 91 будут прореженные в q раз пачки сдвиговых импульсов, используемые в угловом селекторе 89 и втором сдвиговом регистре 87 для синхронизации приема и выдачи информации.
Работа блока доплеровских фильтров 22 (23), фиг 8, происходит следующим образом. Выходной сигнал с усилителя доплеровской частоты 19 (20), поступающий на второй вход аналого-цифрового преобразователя 71, оцифровывается им с тактом импульсов, поступающих на первый вход блока доплеровских фильтров 22 (23) с третьего выхода возбудителя 9 (фиг.11, поз.78). Период тактовых импульсов Тв (такт выборки сигнала) выбирается из условия обеспечения однозначного определения частотного сдвига фильтруемого видеосигнала:
1/Тв>2fв=2(fr+fд2+Δfсм/2).
Оцифрованный сигнал поступает на N доплеровских фильтров 641...64N Каждый из фильтров 64m состоит из генератора квадратур опорной частоты, выполненного на постоянном запоминающем устройстве ПЗУ 65т, умножителей квадратур опоры с оцифрованным сигналом (Умн 1m и Умн 2m) (поз.66m и 67m), интеграторов результатов перемножения Инт 2m (поз.68m) и Инт 3m (поз.69m). Выходы интеграторов Инт 2m (поз.68m) и Инт 3m (поз. 69m) являются квадратурными выходами доплеровского фильтра 64m, выдаваемыми на m-ном выходе блока доплеровских фильтров. Накопление сигнала происходит в течение Ткг=Q Тв, где Q - число накапливаемых выборок сигнала. Задержка опорного сигнала относительно положительного фронта импульса синхронизации, равная 2Rмах/с, и его длительность Ткг определяются прошивкой ПЗУ 65m. При этом значения квадратур (косинусная С(m) и синусная S(m) составляющие на частоте fm) отфильтрованного в полосе 1/Ткг сигнала равны:


где A(q) - значение входного сигнала в q-ой выборке на выходе АЦП 71,
 - номер выборки сигнала.
- номер выборки сигнала.
Временная развертка опорного сигнала с частотой fm=m/2Ткг, записанного в ПЗУ 65m, обеспечивается линейно возрастающим кодом четвертого счетчика 63, поступающим на вход ПЗУ 65m. Счетчик 63 с нулевого значения, устанавливаемого импульсом, приходящим на его второй вход (фиг.11, поз.81), считает тактовые импульсы с периодом Тв, приходящие на его первый вход в течение единичного значения сигнала синхронизации Тлчм (фиг.11, поз.79) с второй схемы И 70. Входными импульсами второй схемы И 70 являются положительный импульс синхронизации и тактовые импульсы, приходящие на второй и первый ее вход соответственно. Импульс установки четвертого счетчика 63 и интеграторов Инт 2m (поз. 68m) и Инт 3m (поз 69m) в исходное положение формируется первой схемой И 61 и вторым триггером 62. При этом триггер 62 задерживает импульс синхронизации (фиг.11, поз.79) на один период тактовых импульсов (фиг.11, поз.78). На первый вход первой схемы И 61 приходит импульс синхронизации, а на второй он же, задержанный на один такт инверсный. Благодаря этому результат фильтрации в течение интервала Тбо сохраняется до нового цикла Тлчм.
Синхронизатор 11 (фиг.5) формирует импульс синхронизации (фиг.11, поз.79) на втором выходе, код развертки сигнала по частоте (дальности) m на третьем выходе и код управления генератором манипулирующих последовательностей на первом выходе. Работа синхронизатора 11 происходит следующим образом. Тактовые импульсы с периодом Тв (фиг.11, поз.78) поступают на счетные (первые) входы первого 53 и второго 56 счетчиков. В режиме счета они работают по очереди и управляются первым триггером 54. Когда на первом выходе первого триггера 54 логическая единица, поступающая на второй (установочный) вход второго счетчика 56, он не считает, на его втором выходе устанавливается код в соответствии с кодом, приходящим со второй кодовой шины 55. В то же время, логический ноль на втором выходе первого триггера 54, поступая на второй установочный вход первого счетчика 53, разрешает ему счет импульсов, приходящих на его первый вход. Импульс переноса на выходе первого счетчика 53 возникает при переходе кода счетчика через максимальное значение. Этот импульс поступая на первый вход первого триггера 54 изменяет его состояние, при котором разрешается счет второму счетчику 56, запрещается счет первому счетчику 53 и устанавливается его код в соответствии с кодом, приходящим с первой кодовой шины 52 на третий вход. Задавая соответствующие коды на шинах 52 и 55, формируется расчетный импульс синхронизации на выходе первого триггера 54 (фиг 11, поз.79) с требуемыми значениями Тлчм и Тбо. Длительность Тбо выбирается равной Тбо≥2NTв, где N - число доплеровских фильтров в блоках доплеровских фильтров 22 и 23. Верхнее значение Тбо определяется необходимым временем возврата генераторов ГЛЧМ 39 и 45 в синтезаторе зондирующего сигнала 8 в исходное состояние и временем выдачи кодов настроек в соответствующие узлы РЛС (синтезатор зондирующего сигнала 8 и усилители доплеровской частоты 19, 20) с УОИ 12. Для этого интервала значений выбирают код на второй кодовой шине 55, при котором младшие разряды кода второго счетчика, несущие информацию о номере опрашиваемого доплеровского фильтра m равны нулю. Импульс синхронизации с выхода первого триггера 54 поступает на третий счетчик 57, формирующий код, используемый для управления генератором манипулирующих последовательностей 10.
Таким образом, предлагаемая моноимпульсная РЛС с единой приемопередающей антенной системой благодаря применению частотно-временной развязки приемного тракта от излучаемого ЛЧМ сигнала, манипулируемого по частоте по перестраиваемому дискретно-временному закону, имеет наименьшую пиковую мощность излучения, что упрощает выполнение высоконадежного малогабаритного выходного устройства передатчика, в том числе на полупроводниковых приборах, при одновременном сокращении времени обзора сцены с целью поиска целей.
На основании приведенного описания и чертежей предлагаемое устройство может быть изготовлено при использовании известных комплектующих изделий, известного в радиоэлектронной промышленности технологического оборудования и использовано на подвижных носителях в качестве РЛС для обнаружения целей и задания их начальных координат для последующей классификации и сопровождения.
Источники информации
1. Патент РФ 2099739 от 20.12.97, МПК G 01 S 13/44. Радиолокационная станция.
2. А.И.Леонов, К.И.Фомичев. Моноимпульсная радиолокация. - М.: Советское Радио, 1970 (с.22. рис 1.9., с.41 рис.1.22).
3. Авторское свидетельство СССР 180795 от 15.11.82, МПК G 01 S 13/44.
4. Д.Джонсон, Дж.Джонсон, Г.Мур. Справочник по активным фильтрам. - М: Энергоиздат, 1983 (с.65-67 рис 7.5).
5. В.Манасевич. Синтезаторы частоты, теория и проектирование. - М.: Связь, 1979 (с.35, рис.1.17; с.190, рис.4.10, 4.11).
6. В.Е.Колчинский, И.А.Мандуровский, М.И.Константиновский. Доплеровские устройства и системы навигации. - М.: Советское Радио, 1975 (с.368-370, рис.11.16).
7. В.А.Лихарев. Цифровые методы и устройства в радиолокации. - М.: Советское Радио, 1973. (с.189 рис 2.39; с.255 рис 3.17).
8. Патент РФ 2189048 от 10.09.2002, МПК G 01 S 13/44, 3/22. Угловой селектор для обзорной моноимпульсной РЛС.
9. Изделие А-038, Руководство по технической эксплуатации ГУ1.000.058 РЭ1 (л. 20/2).
10. Блок ДР1-363И Инструкция по настройке ГУ2.068.159 И2 (л.13).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО СЕЛЕКЦИИ СИГНАЛОВ НАДВОДНОЙ ЦЕЛИ В МОНОИМПУЛЬСНОЙ РЛС | 2004 |
|
RU2278397C2 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1996 |
|
RU2099739C1 |
| ИМПУЛЬСНО-ДОПЛЕРОВСКАЯ МОНОИМПУЛЬСНАЯ РЛС | 2011 |
|
RU2497146C2 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ СОПРОВОЖДЕНИЯ ЦЕЛИ | 1997 |
|
RU2114444C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ЦЕЛИ МОНОИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ | 1997 |
|
RU2117960C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ЦЕЛИ И УСТРОЙСТВО МОНОИМПУЛЬСНОЙ РЛС, РЕАЛИЗУЮЩЕЙ СПОСОБ | 2007 |
|
RU2338219C1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2020 |
|
RU2759511C1 |
| Моноимпульсный пеленгатор с комбинированным антенным устройством | 2015 |
|
RU2624008C2 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2006 |
|
RU2309430C1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ОБНАРУЖЕНИЯ И САМОНАВЕДЕНИЯ | 2010 |
|
RU2439608C1 |
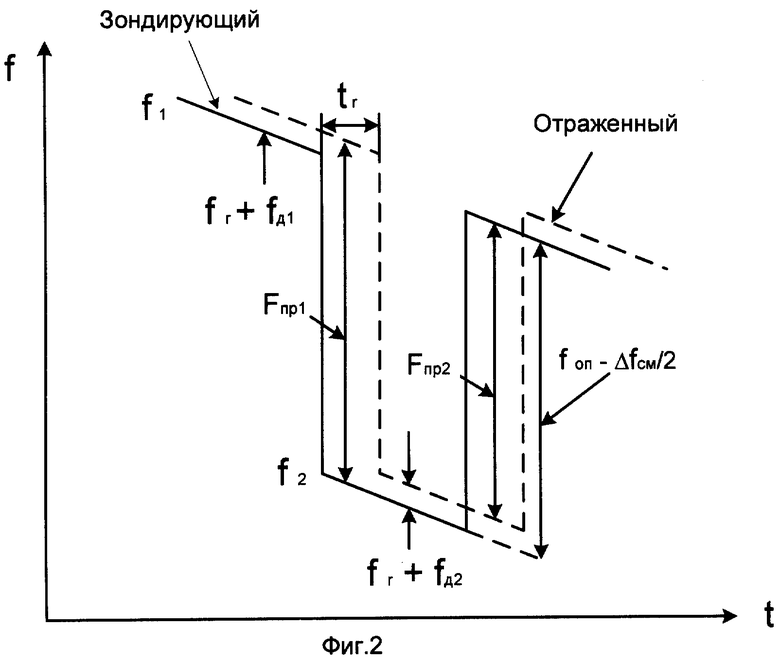
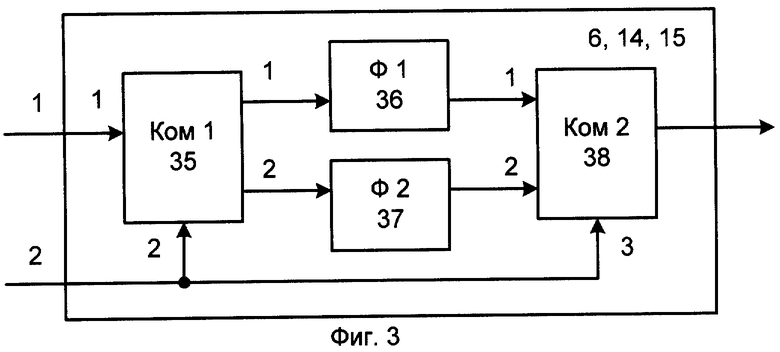
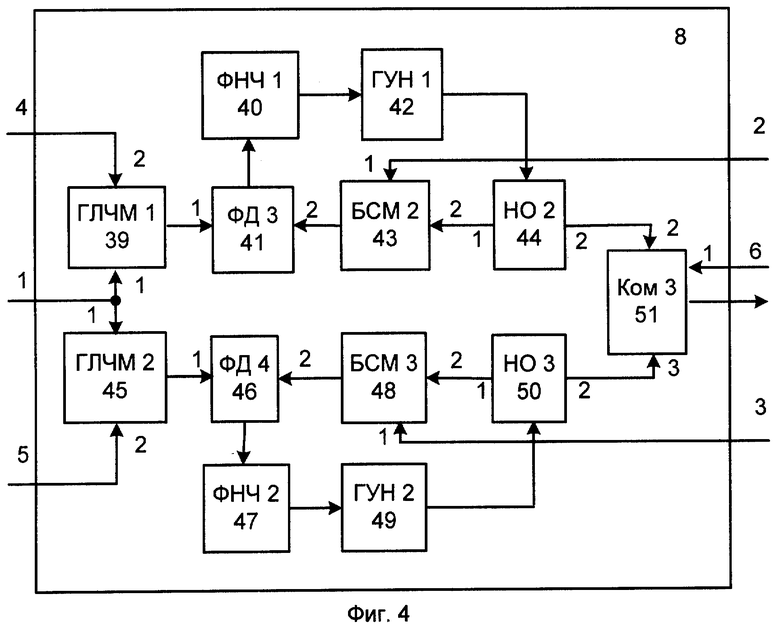
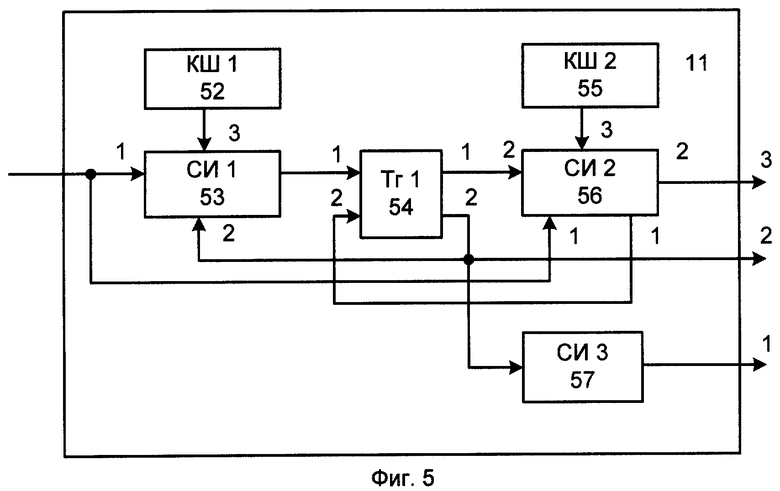
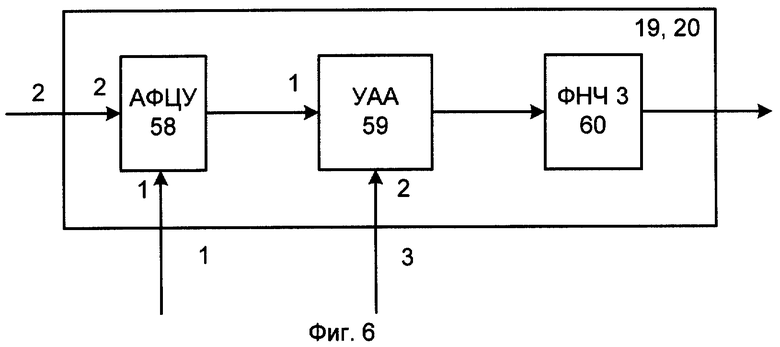
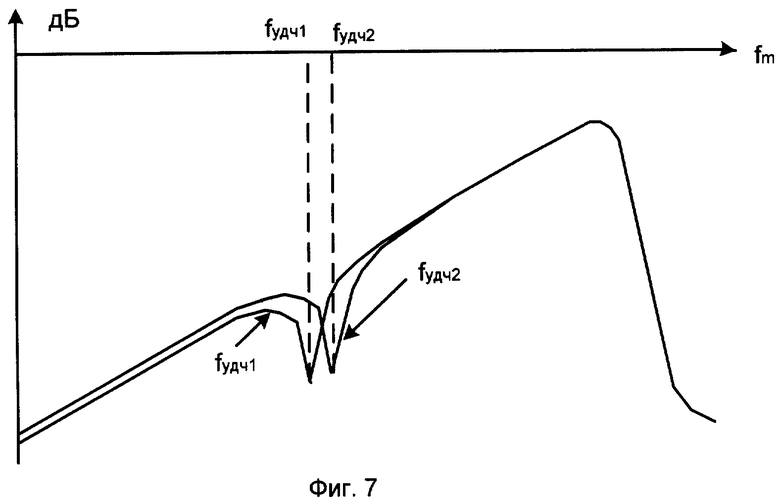
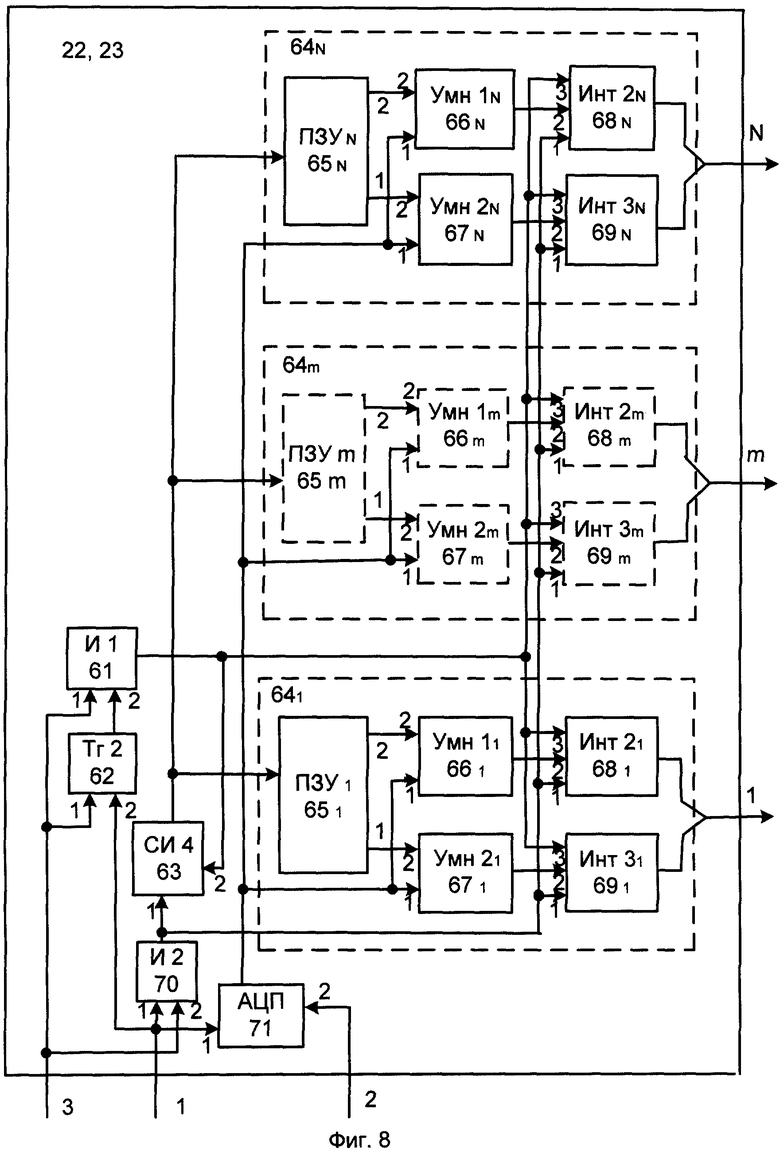

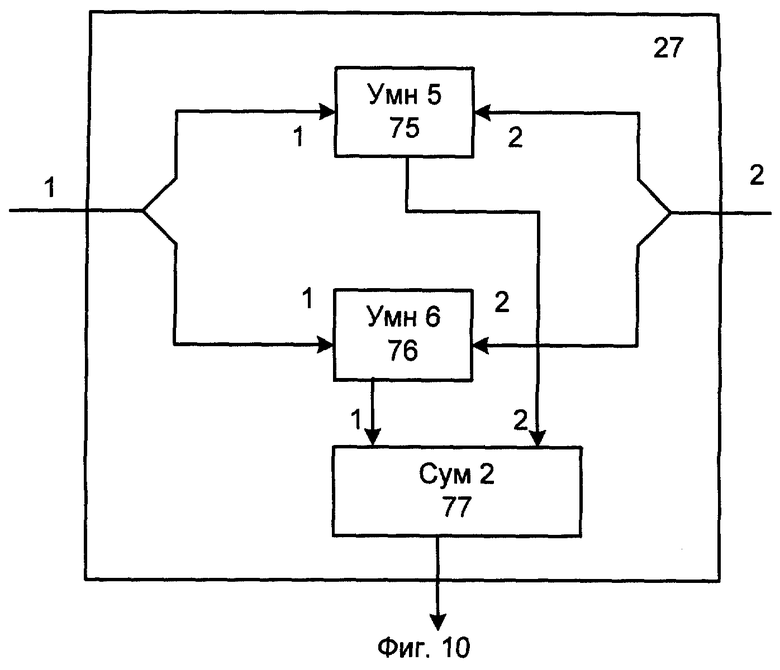

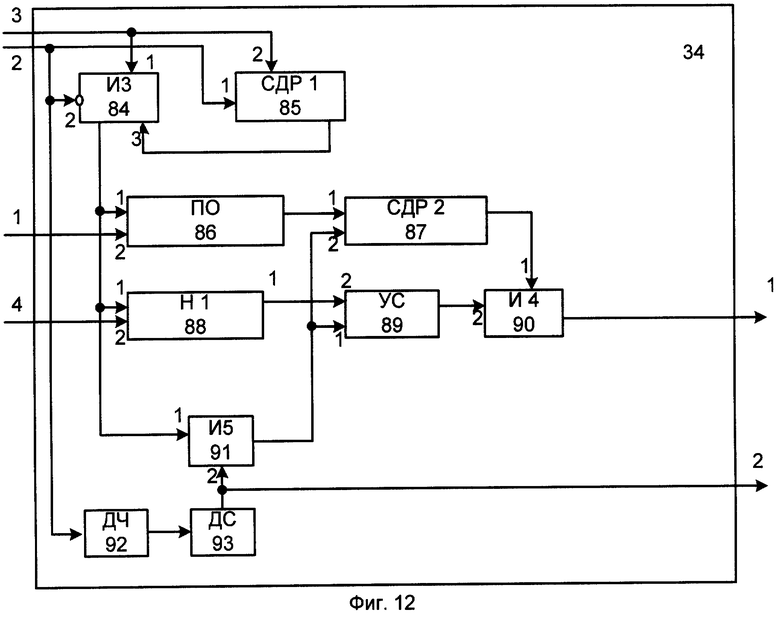
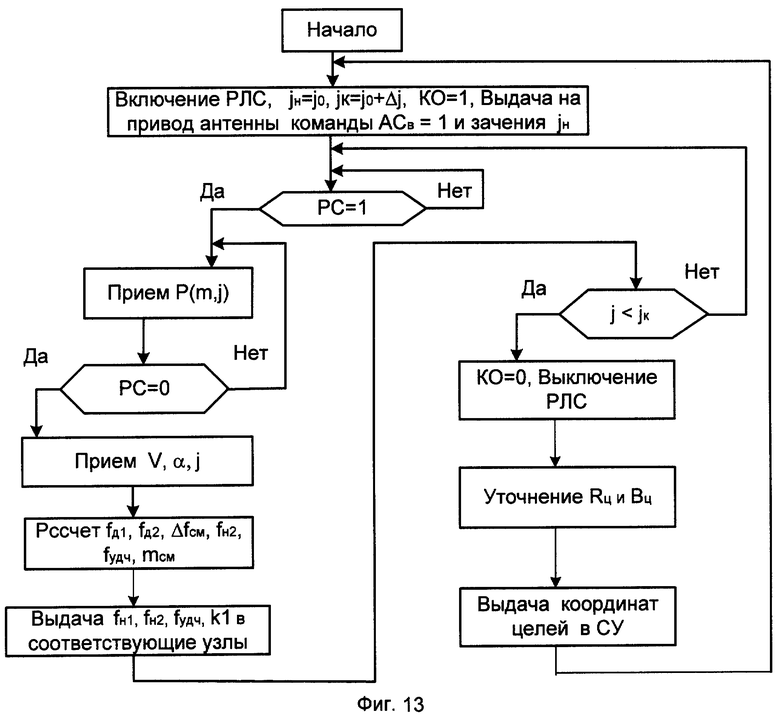
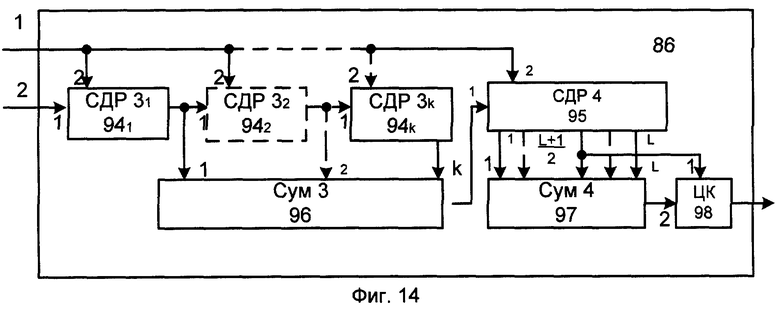
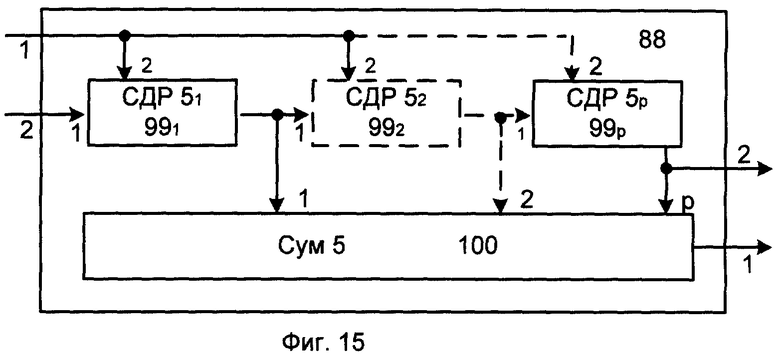

Изобретение относится к радиолокационным системам (РЛС), преимущественно к когерентным РЛС обнаружения целей с непрерывным излучением, к которым предъявлены повышенные требования к снижению времени обзора сцены, использующим ЛЧМ сигнал, дополнительно манипулированный по частоте, и амплитудный суммарно-разностный моноимпульсный принцип пеленгации, работающим на подвижных носителях. Технический результат заключается в обеспечении возможности работы бортовой моноимпульсной РЛС с единой приемопередающей антенной в непрерывном режиме. Устройство содержит антенный блок, суммарно-разностный преобразователь, антенный переключатель, усилитель мощности, направленный ответвитель, коммутируемый фильтр передачи, умножитель частоты, синтезатор зондирующего сигнала, возбудитель, генератор манипулирующих последовательностей, синхронизатор, устройство обработки информации, измеритель скорости и угла сноса, коммутируемые фильтры суммарного и разностного каналов, 2-канальный суммарно-разностный приемник, фазовые детекторы суммарного и разностного каналов, усилители доплеровской частоты суммарного и разностного каналов, автоматическая регулировка усиления, блоки доплеровских фильтров суммарного и разностного каналов, блоки опроса суммарного и разностного каналов, блок объединения квадратур, дискриминатор угла, делитель, привод антенны, 2-канальный усилитель высокой частоты, 2-канальный балансный смеситель, 2-канальный усилитель промежуточной частоты, блоки вторичной и первичной обработки. 1 з.п. ф-лы, 16 ил.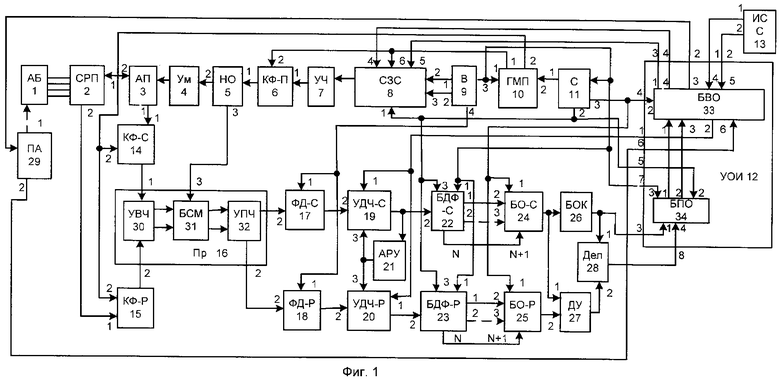
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1996 |
|
RU2099739C1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2000 |
|
RU2178896C1 |
| US 5241318 A, 31.08.1993 | |||
| Клапанное перекидное устройство для мартеновской печи | 1934 |
|
SU49423A1 |
| US 5072224, 10.12.1991. | |||

