Изобретение относится к области электротехники, в частности к электродвигателям с встроенным датчиком положения и скорости, и может быть использовано, например, в вентильных электроприводах в качестве исполнительного элемента, в устройствах автоматики.
Известны электродвигатели с встроенным датчиком углового положения, выполненным с разомкнутым ферромагнитным сердечником и обмотки [1]. Недостатком этого типа устройств является сложность конструкции и узкие функциональные возможности, в частности, за счет отсутствия тахометра.
Наиболее близким по технической сущности к данному изобретению является электромеханический преобразователь (электроагрегат) для вентильного электропривода, содержащий синхронный двигатель и комбинированный датчик угла и скорости [2].
Недостатком такого электроагрегата является сложность конструкции, ввиду наличия трех пакетов магнитопровода, ограниченные функциональные возможности за счет совмещения обмоток возбуждения датчика и его выходных обмоток, а также невысокая точность формирования угловых и скоростных сигналов из-за их взаимного влияния, а также реакции якоря двигателя.
Целью изобретения является расширение функциональных возможностей за счет разделения цепей возбуждения и выходных цепей датчика, повышение точности за счет исключения влияния реакции якоря на выходные сигналы датчика и взаимовлияния скоростного и углового сигналов, а также упрощения конструкции за счет размещения обмоток двигателя и датчика на одном общем магнитопроводе.
Поставленная цель достигается тем, что в электроагрегате, на зубцах которого размещены якорная обмотка синхронного двигателя и выходная обмотка комбинированного датчика положения и скорости, а в аксиальных отверстиях, расположенных по оси зубцов датчика, размещена его обмотка возбуждения, число полюсов индуктора и число зубцов якоря выбрано равным соответственно 2P= 18a, Z = 24 b, где a = b = 1, 2, 3,...; обмотка якоря двигателя выполнена из N групп, в каждой из которых по две катушки, размещенных на соседних зубцах и принадлежащих одной фазе, а выходная обмотка датчика выполнена из четырех указанных групп, по две диаметрально расположенных группы на каждую выходную фазу, причем число групп якорной обмотки двигателя, размещенных между соседними группами выходной обмотки датчика, выбрано четным и равным n = 3a-1±(i-1), i= 1, 2, 3..., а скос пазов якоря выбран равным 1/3 его зубцового деления.
На фиг. 1 представлен в разрезе общий вид предложенного электроагрегата. Для примера рассматривается двухфазный электроагрегат с числом зубцов на статоре Z= 24 и числом полюсов 2P=18 (a=b=1), а на фиг. 2 даны временные диаграммы его работы. Электроагрегат содержит статор (якоря) 1, на зубцах 2 - 9 которого размещены катушки выходной обмотки датчика. Катушки, расположенные на зубцах 2 и 3, 4 и 5, а также 6 и 7, 8 и 9, образуют соответственно группы 1-й и 2-й фаз датчика. Причем, катушки в группах соединены встречно. Катушки, размещенные на зубцах 10 - 17 и 18 - 25, образуют соответственно 1-ю и 2-ю фазы якорной обмотки двигателя. На осях зубцов 2 - 9 в спинке статора 1 выполнены 4 пары аксиальных отверстий, в которых размещена обмотка возбуждения датчика, причем в отверстиях, расположенных на осях зубцов 2, 3 и 6, 7, размещена обмотка первой фазы (с выводами 26), а в отверстиях, расположенных на осях зубцов 4, 5 и 8, 9 - обмотка второй фазы (с выводами 27) возбуждения.
Группы катушек с выводами 28' и 28'' образуют фазы датчика, а группы катушек с выводами 29' и 29'' - полуфазы второй выходной фазы датчика.
Ротор 30 электроагрегата представляет собой индуктор с 18-ю радиально намагниченными магнитами.
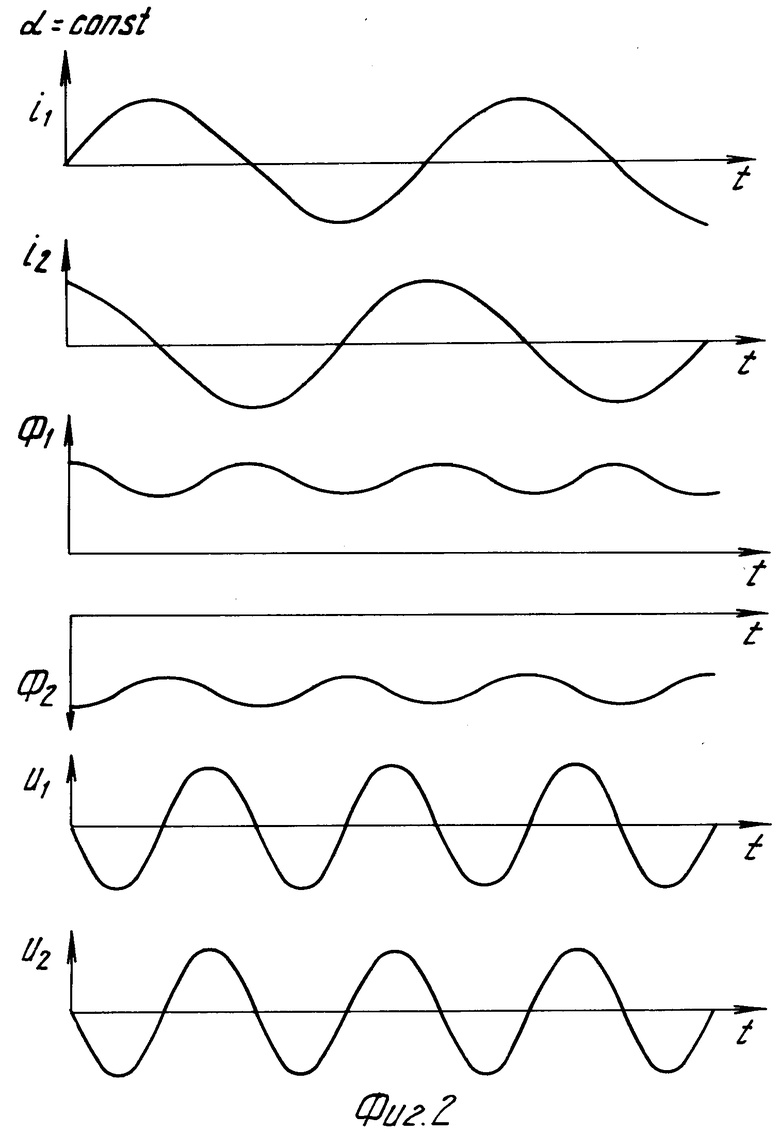
Работает предложенный электроагрегат следующим образом. Синхронный двигатель вращается благодаря двухфазной системе токов, подающихся в якорные обмотки, размещенные на зубцах 10 - 25. Как правило, фазовые соотношения токов якоря и магнитного потока индуктора задаются выходными сигналами датчика положения. Датчик по цепям возбуждения (обмотки с выводами 26, 27) запитан двухфазным током повышенной частоты f. Этот ток, подмагничивая основания зубцов, уменьшает основной поток индуктора в них. Причем это уменьшение происходит и при положительном, и при отрицательном полупериоде протекания тока возбуждения. Изменение основного потока в зубцах приводит к возникновению на выходных обмотках датчика напряжения с удвоенной частотой изменения тока возбуждения, т.е. с частотой 2f. поскольку поток в зубцах 2, 3 и 6, 7 модулируется синусоидальной составляющей тока возбуждения (т.е. током первой фазы), а поток в зубцах 4, 5 и 8, 9 - косинусоидальной составляющей тока возбуждения (т.е. его второй фазой), то соответственно на выходных обмотках 28' и 28'', а также 29' и 29'' будут наводиться синфазные напряжения. Это проиллюстрировано на фиг. 2, где показаны фазные токи в обмотках возбуждения (i1 и i2), магнитные потоки (Φ1, Φ2) в зубцах 2, 4 и 5, 3 соответственно и напряжения (u1, u2) на полуобмотках 28' и 28''.
Поскольку величина основного потока в зубцах является функцией угла поворота ротора (индуктора) 30, то и его переменная составляющая, а следовательно, и амплитуда напряжения удвоенной частоты питания на полуобмотках 28' и 28'' и соответственно на полуобмотках 29' и 29'' будет являться той же функцией угла поворота ротора, т.е. изменяться соответственно по синусному и косинусному закону. Кроме того, при вращении ротора 30 на указанных обмотках будет наводиться напряжение (ЭДС), амплитуда и частота которого определяются частотой вращения и числом пар полюсов ротора. Так как под зубками 2, 3 и 4, 5 (и соответственно 6, 7 и 8, 9) проходят разноименные полюса ротора, то на полуобмотках 28' и 28'' (и 29' и 29'' соответственно) будут наводиться напряжения (ЭДС), находящиеся в противофазе относительно друг друга.
Для выделения сигнала об угловом положении ротора 30 напряжения на полуобмотках 28' и 28'' (29' и 29'') суммируют. При условии, что все катушки обмоток 28 и 29 выполнены идентичными и размещены на зубцах однозначно, можно заключить, что в этом случае ЭДС вращения будет равна нулю.
Для выделения сигнала об угловой скорости вращения ротора 30 (т.е. ЭДС вращения), напряжения на указанных полуобмотках вычитают. В этом случае модулирующее напряжение удвоенной частоты будет равно нулю.
Полуобмотки датчика, занимающие по одной группе каждая, при числе зубцов на статоре Z = 24 (как на фиг. 1) располагаются на взаимно перпендикулярных осях, т.е. под углом 90o, так как число групп обмотки двигателя, размещенных между соседними группами датчика, оказалось четным n = 2 при a = 1 (i = 1). При этом по обе стороны каждой группы обмотки датчика (ее полуфазы) расположены катушечные группы одной из двух фаз двигателя: 2-й фазы - для катушек обмотки 29 датчика, и 1-й фазы - для катушек обмотки 29 датчика. При условии идентичного расположения катушек двигателя на зубцах статора и учитывая, что катушки в полуобмотках датчика включены встречно, можно заключить, что реакция якоря (т.е. напряжение помех от тока двигателя) в обмотках датчика будет отсутствовать, так как напряжение помех компенсируется в полуобмотках. В том случае, когда число групп обмоток двигателя, размещенных между соседними группами датчика, оказывается нечетными при i=1, в частности при числе пазов Z= 48 n= 5 при a = 2, то размещение полуобмоток разных фаз датчика следует производить не под углом 90o относительно друг друга, а под углом соответственно в 75 и 105o (располагая полуобмотки каждой фазы диаметрально). При этом между соседними группами датчика оказывается соответственно 4 или 6 групп обмоток двигателя (n =5±1 при i=2), т.е. четное их число. Последнее означает, что по обе стороны полуобмотки датчика будут располагаться катушки одной фазы двигателя и реакция якоря будет отсутствовать.
Следует отметить, что размещение катушек датчика на двух (а не одном, как в прототипе) соседних зубцах так же, как и сдвиг пазов, улучшает форму выходного сигнала за счет уменьшения амплитуд высших гармоник, а скос пазов статора на 1/3 зубцового деления статора практически снимает зубцовые залипания.
Макет предложенного электроагрегата был выполнен на базе синхронного электродвигателя спецразработки (по типу двигателя ДБМ) с числом пазов на якоре - 24.
На каждом из 8 зубцов, расположенных диаметрально и взаимноперпендикулярно в соответствии с фиг. 1, размещены катушки выходной обмотки датчика с числом витков 240. В отверстиях на оси этих зубцов размещена обмотка возбуждения - по 20 витков в каждой паре отверстий. Обмотка возбуждения запитана 2 фазной системой токов, амплитуда которого 5 А, частота 50 Гц. Выходное напряжение датчика положения (при суммировании выходных сигналов с полуобмоток) равно 5 В при частоте 100 Гц, крутизна тахометрического сигнала (при вычитании напряжений с полуобмоток датчика) - 0,12 В•мин/об.
Число витков в катушках якорной обмотки двигателя - 60. Ток якоря Iяmax= 10 А. Вращающий момент Mm=10 Нм. При изменении тока якоря от 0 до 10 А реакция якоря на выходное напряжение датчика не обнаружена.
Таким образом, в предложенном электроагрегате: во-первых, обеспечивается совмещение трех электрических машин на одном общем магнитопроводе (что упрощает конструкцию и технологию изготовления агрегата); во-вторых, обеспечивается гальваническая развязка цепей возбуждения и съема информации в комбинированном датчике (что расширяет его функциональные возможности); в-третьих, исключено влияние реакции якоря и уменьшено влияние высших гармоник на выходной сигнал датчика, что повышает качество (точность) измерения углового положения и скорости вращения ротора агрегата.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИНХРОННЫЙ АГРЕГАТ | 1991 |
|
RU2076437C1 |
| ЭЛЕКТРОПРИВОД | 1995 |
|
RU2087068C1 |
| ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ С ВСТРОЕННЫМИ ДАТЧИКАМИ СКОРОСТИ И УГЛОВОГО ПОЛОЖЕНИЯ РОТОРА | 2001 |
|
RU2188494C1 |
| Электромеханический преобразователь вентильного электродвигателя | 1989 |
|
SU1700704A1 |
| СПОСОБ ВЗАИМНОЙ УСТАНОВКИ СИНХРОННОГО ДВИГАТЕЛЯ И СИНУСНО-КОСИНУСНОГО ВРАЩАЮЩЕГОСЯ ТРАНСФОРМАТОРА | 1994 |
|
RU2079964C1 |
| СПОСОБ ВЗАИМНОЙ УСТАНОВКИ СИНХРОННЫХ ДВИГАТЕЛЕЙ | 1994 |
|
RU2079954C1 |
| Однокорпусный тяговый электроагрегат | 1983 |
|
SU1101980A1 |
| ЭЛЕКТРИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2008 |
|
RU2392730C1 |
| СИНХРОННЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1986 |
|
RU2047936C1 |
| ЭЛЕКТРОПРИВОД | 1999 |
|
RU2155437C1 |
На зубцах 2-9 статора электроагрегата размещены якорная обмотка двигателя и выходная обмотка комбинированного датчика положения и скорости. В аксиальных отверстиях, выполненных по оси зубцов датчика, размещена его обмотка возбуждения. Число полюсов индуктора ротора и число зубцов 2-9 якоря выбрано равным соответственно 2P = 18a и Z = 24b, где a = b = 1,2,3, .... Обмотка якоря двигателя выполнена из N групп, в каждой из которых по 2 катушки, размещенных на соседних зубцах и принадлежащих одной и той же фазе. Выходная обмотка датчика выполнена из 4-х указанных групп, по две диаметрально расположенных группы на каждую выходную фазу. Число групп якорной обмотки двигателя, размещенных между соседними группами выходной обмотки датчика выбрано четным и равным n = (3a-1) ± (i - 1), где i = 1,2,3... В предложенном электроагрегате обеспечивается совмещение трех электрических машин на общем магнитопроводе, а также гальваническая развязка цепей возбуждения и съем информации в комбинированном датчике. 2 ил.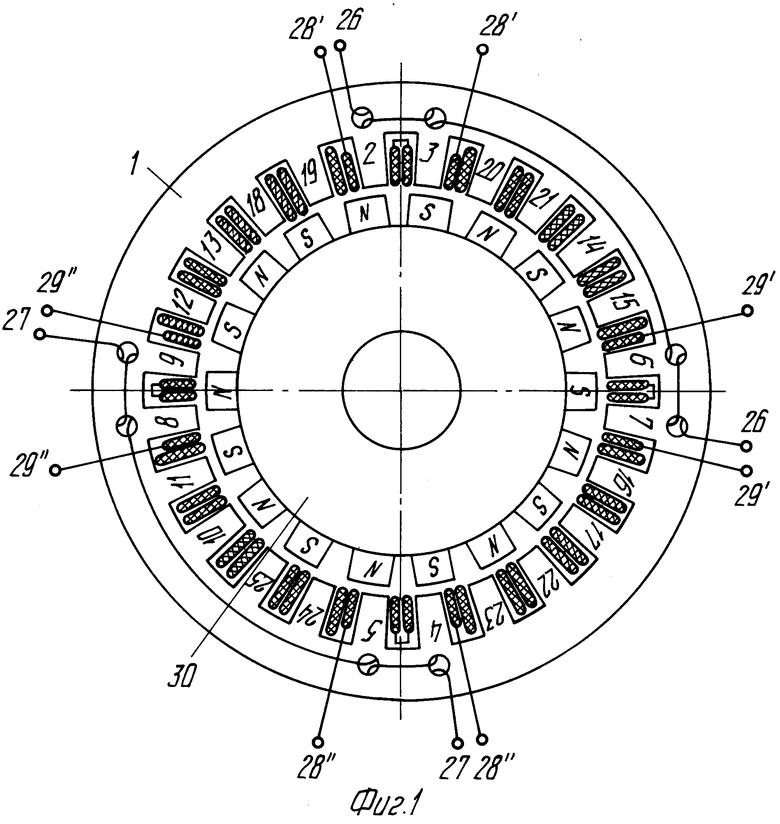
Электроагрегат, содержащий статор, на зубцах которого размещена якорная обмотка электродвигателя и выходная обмотка комбинированного датчика положения и скорости, обмотка возбуждения которого размещена в аксиальных отверстиях, выполненных по оси зубцов комбинированного датчика в спинке статора, и ротор в виде индуктора с полюсами, отличающийся тем, что число полюсов индуктора ротора и число зубцов статора выбрано равным соответственно 2Р = 18а и Z = 24b, где a = b = 1, 2, 3 ..., якорная обмотка электродвигателя выполнена из N групп, в каждой из которых по две катушки, размещенных на соседних зубцах и принадлежащих одной и той же фазе, а выходная обмотка комбинированного датчика выполнена из четырех указанных групп, по две диаметрально расположенные группы на каждую фазу, причем число групп якорной обмотки двигателя, размещенных между соседними группами выходной обмотки комбинированного датчика, выбрано четным и равным
n = (3a - 1) ± (i - 1),
где i = 1, 2, 3 ...,
а скос пазов статора выбран равным 1/3 его зубцового деления.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| SU, авторское свидетельство, 955398, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| SU, авторское свидетельство, 1700704, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
