Изобретение относится к машиностроению и может применяться в различных его областях для машин, характеризующихся переменным характером внешней нагрузки и, как следствие, потребностью в непрерывном и плавном преобразовании крутящего момента и скорости вращения.
Показательным примером возможного применения изобретения являются транспортные машины, где фрикционный реверсивный вариатор может служить устройством непрерывного регулирования передаточного числа трансмиссии с целью поддержания оптимального режима работы двигателя, и, тем самым, для обеспечения наиболее высоких тягово-скоростных и топливно-экономических свойств транспортной машины.
Известен фрикционный вариатор, входящий в регулируемый поток замкнутой передачи [1].
Аналог характеризуется следующими признаками:
1. Наличие корпуса, ведущего и ведомого валов.
2. Установленные в корпусе планетарные механизмы, расположенные соосно и симметрично и соединенные параллельно в потоке передаваемой мощности.
3. Каждый планетарный механизм типа 2К-Н (по классификации Кудрявцева В. Н.) содержит два центральных колеса, водило и сателлиты.
4. Сателлиты образуют с центральными колесами конические передачи.
5. Водило неподвижно относительно корпуса, что превращает планетарный механизм в простую многопоточную передачу.
6. Сателлиты имеют в качестве рабочих соосные конические поверхности - основную, направленную вершиной к периферии, и по две дополнительных.
7. Передача от сателлита - через основную коническую поверхность - к ведомому колесу выполнена фрикционной.
8. Передача от ведущего колеса к сателлиту выполнена фрикционной.
9. Регулирование скорости вращения ведомого колеса достигается за счет возможности его перемещения вдоль образующей основной конической поверхности сателлита, которая параллельна оси вариатора. Скорость точек образующей переменная.
10. Наличие устройства для перемещения ведомых колес (синхронное сближение или удаление) винтового типа.
11. Наличие системы формирования силы прижатия во фрикционной передаче в виде самозатягивающегося от момента передаваемой мощности механизма шариковинтового типа, установленного со стороны ведущего вала.
12. Система уравновешивания сателлитов основана на силах взаимодействия их дополнительных конических поверхностей с сопрягаемыми деталями.
13. Одна из дополнительных конических поверхностей сателлита взаимодействует с ведущим колесом и вращательной опорой.
14. Вторая дополнительная коническая поверхность взаимодействует с осевой вращательной опорой, которая является сателлитом соседнего планетарного механизма.
15. Устройство соединения ведомых колес с ведомым валом содержит две полуоси, связанные с ведомыми колесами подвижно в осевом направлении.
16. Полуоси связаны с центральными колесами дифференциала.
17. Ведущий и ведомый валы расположены соосно.
18. Точка пересечения геометрических осей сателлитов соседних планетарных механизмов расположена на периферии вариатора.
По признакам аналога 1, 2, 4, 6, 7, 9, 10, 11, 12, 17, имеется совпадение с существенными признаками изобретения.
В качестве причин, препятствующих получению требуемого технического результата, следует отметить:
1. Недостаточный - узкий - диапазон регулирования передаточного числа вариатора.
2. Отсутствие возможности реверсирования, т.е. придания ведомому валу вращения в противоположных направлениях.
Аналогом, наиболее близким к изобретению по совокупности признаков (прототипом), является фрикционный планетарный реверсивный вариатор [2].
Прототип характеризуется следующими признаками:
1. Наличие корпуса, ведущего и ведомого валов.
2. Установленные в корпусе планетарные механизмы, расположенные соосно и симметрично и соединенные параллельно в потоке передаваемой мощности.
3. Каждый планетарный механизм типа 3К (по классификации Кудрявцева В.Н. ) содержит три центральных колеса, водило и сателлиты.
4. Сателлиты образуют со всеми центральными колесами конические передачи.
5. Сателлиты имеют в качестве рабочих по три соосные конические поверхности.
6. Передача от сателлита - через основную коническую поверхность - к ведомому колесу выполнена фрикционной.
7. Передача от ведущего колеса к сателлиту выполнена фрикционной.
8. Передача от сателлита к неподвижному колесу выполнена фрикционной.
9. Регулирование скорости вращения ведомого колеса достигается за счет возможности его перемещения вдоль образующей основной конической поверхности сателлита, которая параллельна оси вариатора. Скорость точек образующей переменная.
10. Наличие в пределах длины рабочего отрезка образующей основной конической поверхности сателлита точки с нулевой скоростью /V = 0/ - на пересечении с мгновенной осью вращения сателлита.
11. Наличие устройства для перемещения ведомых колес (синхронное сближение или удаление) винтового типа.
12. Сателлиты размещены в водиле с возможностью самоустановки.
13. Наличие системы формирования силы прижатия во фрикционной передаче в виде самозатягивающегося от момента передачи мощности механизма самоподтягивания шариковинтового типа, установленного со стороны ведущего вала.
14. Система уравновешивания сателлитов основана на силах взаимодействия их дополнительных конических поверхностей с сопрягаемыми деталями (опорами).
15. Одна из дополнительных конических поверхностей сателлита взаимодействует с ведущим, и неподвижным колесами.
16. Другая дополнительная коническая поверхность сателлита взаимодействует с сателлитом соседнего планетарного механизма.
17. Устройство соединения ведомых колес с ведущим валом содержит две полуоси, связанные с ведомыми колесами подвижно в осевом направлении.
18. Кроме полуосей устройство соединения содержит конический дифференциал, водило которого связано с ведущим колесом цилиндрической зубчатой передачи, а ведомое колесо неподвижно связано с ведомым валом вариатора.
19. Ведущий и ведомый валы вариатора несоосны, параллельны.
20. Неподвижные центральные колеса связаны с боковыми крышками корпуса.
21. Точка пересечения геометрических осей сателлитов расположенных рядом планетарных механизмов находится на периферии вариатора.
22. Ведущие нажимные кольца механизма самоподтягивания, установленные неподвижно на ведущем валу, расположены внутри относительно его ведомых колец.
По признакам прототипа 1, 2, 3, 4, 5, 6, 9, 10, 11, 12, 13, 14, 17 имеется совпадение с существенными признаками изобретения.
Причинами, препятствующими получению требуемого технического результата, являются:
1. Отсутствие в прототипе устройства для обеспечения оптимального и стабильного отношения μ/k - наиболее важного качественного показателя фрикционной передачи. Здесь μ - коэффициент трения во фрикционном контакте; k = Pокр/F - коэффициент сцепления, Pокр - окружная сила на ведомом колесе, F - сила прижатия во фрикционной передаче. По существу, отношение μ/k является показателем запаса фрикционной передачи по силам трения. Сила Pокр пропорциональна внешней нагрузке, выраженной крутящим моментом на ведомом валу вариатора. Эта сила для разных машин изменяется в широких пределах.
Следствия названной неоптимальности:
а/ при значениях μ/k в пределах 1,0...1,25 передача недостаточно надежна ввиду малого запаса по силам трения.
б/ при значениях μ/k, превышающих 1,5 необоснованно понижается нагрузочная способность фрикционной передачи из-за большого запаса /пережатие/.
в/ при значениях μ/k меньше 1,0 передача неработоспособна ввиду непрерывного буксования, т.е. ненадежна.
Оптимальным значением отношения μ/k /запасом/ следует считать 1,25... 1,4.
Управление отношением μ/k представляется возможным только за счет силы F. После преобразования имеем F = Pокр/k; k = μ/1,25...1,4. Тогда F = Pокр• μ/1,25. . . 1,4. Отсюда видно, что сила F d большей степени зависит от Pокр, отражающей весьма значительные колебания внешней нагрузки. В конечном счете, задача оптимизации отношения μ/k превращается в задачу оптимизации силы прижатия F фрикционной передачи.
2. Неоптимальность взаимного расположения и параметров рабочих конических поверхностей сателлита /направление вершин дополнительных конических поверхностей, соотношение углов при вершинах этих поверхностей, величина этих углов/. Если изобразить фигуру /четырехугольник/ замыкания сил, действующих на сателлит, то "полезной" в этом сочетании является сила прижатия F. "Полезность" же остальных участвующих сил может оцениваться отношением проекции силы на линию действия силы F к проекции этой силы на линию, перпендикулярную линии силы F.
Названная неоптимальность в прототипе выражается в том, что проекции сил, воздействующих на сателлит, на линию, перпендикулярную линии силы F, имеют значительную величину, превосходящую в несколько раз по величине силу прижатия. Следствием этого является понижение КПД.
3. Неоптимальность применения фрикционных передач от ведущего колеса к сателлиту, а также от сателлита к неподвижному колесу. Обе эти фрикционные передачи имеют значительно худшие нагрузочные возможности по сравнению с основной фрикционной передачей - от сателлита на ведомое колесо.
Следствия названной неоптимальности:
а/ ограничение нагрузочной способности вариатора,
б/ понижение КПД вариатора.
4. Неоптимальность системы уравновешивания сателлита, заключающаяся в том, что силы прижатия в контактных точках трех фрикционных передач прототипа одновременно являются силами, участвующими в обеспечении условий равновесия сателлита.
По условиям равновесия сумма сил, действующих на сателлит, должна быть равна нулю / Σ P = 0/, и сумма моментов сил также равна нулю / Σ M = 0/. Двойственная роль сил прижатия в трех фрикционных передачах прототипа усугубляется тем, что одна из трех сил прижатия, а именно сила F прижатия в передаче от сателлита к ведомому колесу, перемещается параллельно сама себе вдоль образующей основной конической поверхности сателлита и это ее перемещение вызывает изменение соотношения всех трех сил прижатия - в связи с обеспечением условий равновесия / Σ P = 0; Σ M = 0/. Изложенное обстоятельство приводит в общем случае к изменению отношения μ /k в каждой из трех фрикционных передач, переводя один в область недостаточной надежности / μ /k = 1. 0...1,25/, а другие в область μ /k>1,5, что означает пережатие.
Кроме того, использование одной из дополнительных конических поверхностей сателлита /из соседнего планетарного механизма/ в качестве осевой вращательной опоры связано с возможностью пробуксовок соседствующих сателлитов и возникновению потерь мощности.
В целом, следствием неоптимальности системы уравновешивания сателлитов является понижение КПД и надежности вариатора.
5. Неоптимальность взаимного расположения геометрических осей сателлитов соседних планетарных механизмов, а также взаимного расположения ведущих и ведомых нажимных колец механизма самоподтягивания. Конкретно, названная неоптимальность состоит в том, что точка пересечения геометрических осей сателлитов расположенных рядом планетарных механизмов находится на периферии вариатора, а ведущие нажимные кольца механизма самоподтягивания, установленные на ведущем валу, расположены внутри относительно его ведомых нажимных колец.
В описанной ситуации усилие механизма самоподтягивания замыкается через сателлиты и неподвижные колеса на корпус вариатора, в результате чего сильно нагружаются боковые крышки корпуса, их фланцевые соединения. Поэтому требуется ужесточение конструкции корпуса, что приводит к его утяжелению. Это понижает надежность вариатора и ухудшает весовые показатели на единицу передаваемой мощности.
6. Неоптимальность взаимного расположения ведущего и ведомого валов, которые в прототипе несоосны. Это ухудшает компоновочные качества фрикционного вариатора.
Предлагаемое изобретение направлено на создание фрикционного реверсивного вариатора с бесконечным диапазоном передаточных чисел.
Технические результаты, которые могут быть получены при осуществлении изобретения:
1. Повышение нагрузочной способности вариатора.
2. Повышение коэффициента полезного действия /КПД/.
3. Повышение надежности.
4. Улучшение компоновочных свойств вариатора.
Сущность предлагаемого изобретения заключается в следующем. Фрикционный реверсивный вариатор содержит корпус, ведущий и ведомый валы, а также два параллельно соединенных трехколесных планетарных механизма, которые расположены соосно и симметрично относительно поперечной плоскости. Сателлиты имеют в качестве рабочих по три соосных конических поверхности - основную и по две дополнительных. Основная рабочая коническая поверхность имеет образующую, параллельную оси вариатора и направлена вершиной к периферии. Основная коническая поверхность введена в контакт с ведомым колесом. Одна из дополнительных конических поверхностей направлена вершиной противоположно основной. Сателлиты, размещенные в водиле с возможностью самоустановки, образуют с ведущим, неподвижным и ведомым колесами конические передачи. Передача от сателлита к ведомому колесу выполнена фрикционной. Вариатор содержит устройство для перемещения ведомых колес, а также систему формирования силы прижатия во фрикционной передаче, выполненную в виде механизма самоподтягивания, ведомые нажимные кольца которого связаны со ступицами ведущих колес и - через шарики - с ведущими нажимными кольцами.
Вариатор имеет систему уравновешивания сателлитов, а также устройство соединения ведомых колес с ведомым валом.
От прототипа изобретение отличается следующим. Ведущий и ведомый валы расположены соосно, что улучшает компоновочные свойства вариатора. Вариатор снабжен внутренним ведущим валом, кинематически связанным и соосным с ведущим валом, а также внутренним ведомым валом, кинематически связанным и соосным с ведомым валом. Внутренний ведомый вал жестко посредством полуосей связан с устройством соединения ведомых колес с ведомым валом.
Для повышения нагрузочной способности и КПД сателлиты в расположенных рядом планетарных механизмах установлены так, что их геометрические оси сходятся к оси вариатора, а каждый сателлит снабжен зубчатым венцом, состоящим в зацеплении с ведущим и неподвижным колесами, при этом ведущие колеса подвижно установлены на внутреннем ведущем валу, а неподвижные колеса жестко связаны с поперечной кольцевой перегородкой корпуса - между планетарными механизмами. Вторая дополнительная рабочая коническая поверхность сателлита направлена вершиной к оси вариатора, т.е. в ту же сторону, как и первая дополнительная поверхность. Углы при вершинах таковы, что образующие углов по одну сторону сателлита расположены перпендикулярно к оси вариатора, а по другую сторону сателлита образующие наклонены под углом от 4 до 10o к оси вариатора. Система уравновешивания сателлитов снабжена опорами, введенными в контакт с дополнительными коническими поверхностями сателлитов. Опоры имеют возможность вращения за счет установки на подшипниках качения. Опора для восприятия осевой нагрузки расположена между поперечной перегородкой и сателлитами, а опоры для восприятия радиально-осевой нагрузки разнесены в осевом направлении на расстояние, при котором обеспечивается уравновешивание сателлитов.
Для повышения надежности, нагрузочной способности и КПД вариатора система формирования силы прижатия во фрикционной передаче снабжена шариковинтовым механизмом нагружения, нажимные кольца которого связаны кинематически и расположены справа и слева от поперечной перегородки корпуса для взаимодействия друг с другом посредством шариков, размещенных в отверстиях поперечной перегородки, и дифференциальным механизмом, посредством зубчатых колес связывающим механизм нагружения и ведомый вал. Ведущие нажимные кольца механизма самоподтягивания установлены неподвижно на внутреннем ведущем валу и расположены снаружи относительно ведомых нажимных колец.
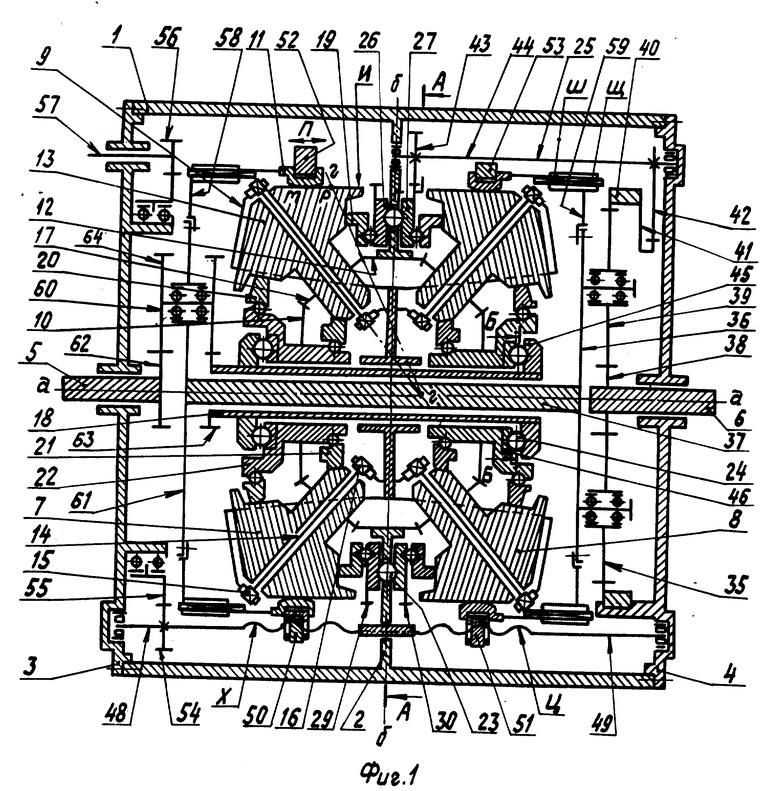
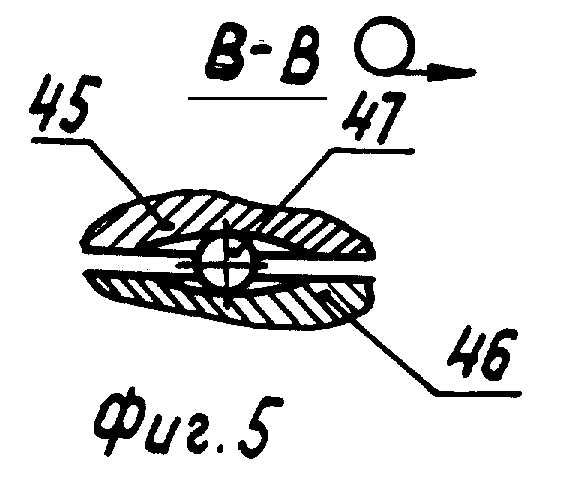
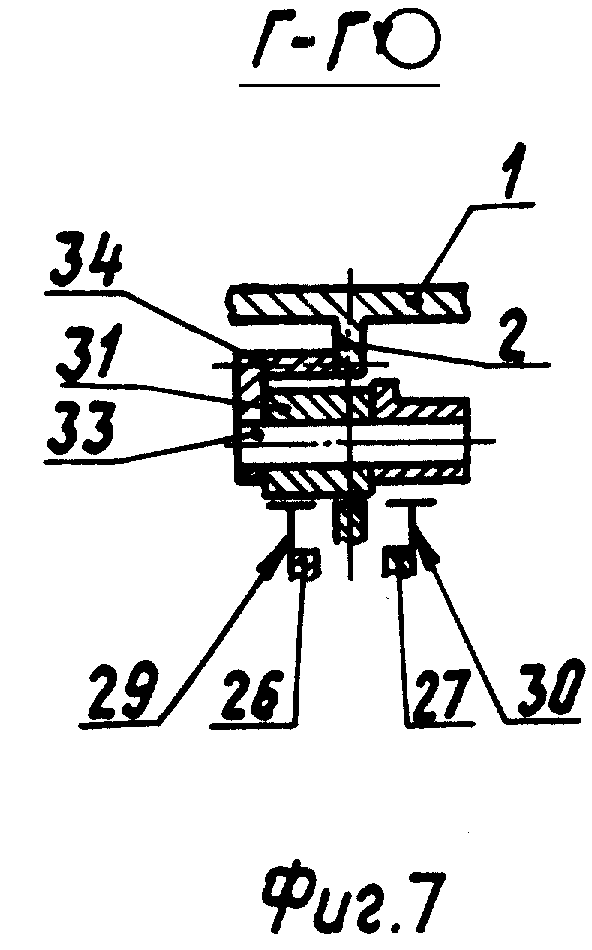
На фиг. 1 изображена конструктивная схема фрикционного реверсивного вариатора; на фиг. 2 - силуэт сателлита, параметры его рабочих поверхностей и расположение сил, действующих на него; на фиг. 3 - четырехугольник сил, действующих на сателлит; на фиг. 4 - разрез Б-Б на фиг. 1 по механизму самоподтягивания; на фиг. 5 - в развернутом виде разрез В-В на фиг. 4 по нажимным кольцам механизма самоподтягивания; на фиг. 6 - разрез А-А на фиг. 1, где секущая плоскость в большей части проходит по оси симметрии поперечной перегородки корпуса; на фиг. 7 разрез Г-Г на фиг. 6 с одним из колес, связывающих нажимные кольца механизма нагружения системы формирования силы прижатия; на фиг. 8 - разрез Д-Д на фиг. 6 по второму колесу, участвующему в связи нажимных колец механизма нагружения; на фиг. 9 - разрез Е-Е на фиг. 6 по шариковинтовому механизму нагружения.
Фрикционный реверсивный вариатор /фиг. 1/ содержит пылевлагозащитный герметичный корпус 1 цилиндрической формы с поперечной перегородкой 2 кольцеобразной формы посредине. По бокам корпуса расположены передняя крышка 3 и задняя крышка 4 фланцевого крепления. Через центральное отверстие крышки 3 внутрь корпуса проходит ведущий вал 5, а через аналогичное отверстие крышки 4 из корпуса 1 наружу выходит ведомый вал 6. Валы 5 и 6 соосны, их общая ось "а-а" /фиг. 1, 2/ является осью вариатора.
Внутри корпуса 1 /фиг. 1/ справа и слева от перегородки 2 размещены два одинаковых по устройству планетарных механизма 7 и 8. Планетарные механизмы расположены относительно друг друга соосно /общая ось совпадает с осью "а-а" вариатора/ и симметрично относительно плоскости "б-б" симметрии поперечной перегородки 2.
Применение планетарных механизмов обусловлено необходимостью разделения передаваемого потока мощности на несколько элементарных потоков - по числу сателлитов планетарного механизма.
Удвоение количества участвующих в передаче мощности планетарных механизмов - при условии их параллельного соединения в потоке - позволяет увеличить число элементарных потоков.
Схема применяемых планетарных механизмов - трехколесная /ЗК/ с водилом 9, не участвующим в передаче мощности. Кроме водила 9, общего для обоих планетарных механизмов, в каждый из них входят центральные колеса - ведущее колесо 10, ведомое колесо 11 и неподвижное колесо 12 - и сателлиты 13. Оси 14 сателлитов снабжены цифрами 15, 16, которые подвижно связаны с водилом 9. В целом, за счет водила 9 и осей 14 геометрическая ось "в-в" вращения каждого сателлита 13 пересекается с осью "а-а" вариатора /фиг. 2/, а это означает, что передачи, связывающие сателлит 13 с колесами 10, 11, 12, являются по типу коническими.
Рабочими поверхностями сателлита 13, которыми он взаимодействует с другими деталями, являются /фиг. 2/: И - основная коническая поверхность, К и Л - дополнительные конические поверхности. Рабочие конические поверхности соосны с осью "в-в" сателлита. Основная коническая поверхность И направлена вершиной /фиг. 1/ в сторону периферии. Передача от сателлита - через основную коническую поверхность И - к ведомому колесу 11 выполнена фрикционной, т.е. использующей силы трения, что определяет основную характеристику изобретения - фрикционный вариатор. Пара трения этого вариатора - закаленная сталь по закаленной стали в масле. Характер контакта основной конической поверхности И сателлита 13 /фиг. 1/ с колесом 11 точечный за счет того, что профиль поверхности колеса 11, соприкасающийся с сетеллитом, очерчен по дуге окружности. Две другие передачи (с колесами 10 и 12) выполнены зубчатыми, цилиндроконического исполнения. В связи с этим сателлит 13 снабжен зубчатым венцом 17, который входит в зацепление с ведущим колесом 10, установленным своей ступицей подвижно на внутреннем ведущем валу 18, и с неподвижным колесом 12, связанным жестко с поперечной перегородкой 2 корпуса 1 (фиг. 1).
На фиг. 2 показаны силы, действующие на сателлит 13 и приложенные к конкретным рабочим поверхностям. Сила F - от взаимодействия сателлита с ведомым колесом 11 - это сила прижатия в точке фрикционного контакта M на основной конической поверхности И. Сила Q - это усилие взаимодействия сателлита 13 (через дополнительную коническую поверхность K) с осевой опорой 19 (фиг. 1). Силы R и S - это усилия взаимодействия сателлита (через дополнительные конические поверхности К и Л) с радиально-осевыми опорами 20 и 21. (фиг. 1). Опоры 19, 20 и 21 представляют собой тела вращения, установленные на подшипниках качения. Осевая опора 19 расположена в пространстве между сателлитами 13 (фиг. 1) и поперечной перегородкой 2 корпуса. Радиально-осевые опоры 20 и 21 размещены на ступице 22 ведущего колеса 10. Характер контакта опор 19, 20, 21 с рабочими коническими поверхностями К, Л сателлита 13 - точечный.
Из фиг. 2 видно, что если межосевой угол ϕ конических передач планетарного механизма равен половине угла γ при вершине основной конической поверхности И, то образующая этой поверхности (на ней обозначен рабочий отрезок НО) становилась параллельной оси "а-а" вариатора. Это делает возможным перемещение ведомого колеса 11 в направлениях, обозначенных стрелкой П (фиг. 1), при сохранении контакта с сателлитом 13 по образующей основной конической поверхности И (фиг. 2) в пределах длины отрезка НО.
Принцип регулирования скорости вращения ведомого колеса 11 состоит в том, что линейные скорости точек образующей поверхности И различны, они пропорциональны расстоянию от точки М (фиг. 2) фрикционного контакта до полюса Р (фиг. 1, 2), находящегося на пересечении отрезка НО образующей с мгновенной осью вращения "г-г" сателлита (фиг. 1, 2). Ось "г-г" отстоит от оси "в-в" сателлита на угол θ/2 /фиг. 2/, здесь θ - угол начального конуса сателлита 13, зависящий от числа зубьев колес 10, 12, венца 17 /фиг. 1/ и межосевого угла ϕ .
Линейная скорость в полюсе P равна нулю, поэтому при контакте в полюсе P ведомое колесо 11 неподвижно, его вращательная скорость равна нулю. Чем дальше точка фрикционного контакта отстоит от полюса P, тем больше вращательная скорость ведомого колеса 11.
Если точка M фрикционного контакта переместится на другую сторону относительно полюса P, то направление вращательной скорости колеса 11 становится противоположным. В этом заключается принцип реверсивности вариатора. Все четыре силы F, Q, R, S, /фиг. 2/ функционально взаимосвязаны. Сила прижатия F является полезной и необходимой для осуществления фрикционной передачи.
В целом, роль сил F, Q, R, S при воздействии на сателлит двоякая - они участвуют в двух системах:
1/ в системе уравновешивания сателлитов - через восприятие сил их рабочими коническими поверхностями,
2/ в системе формирования силы прижатия в контакте фрикционной передачи.
Для создания прижимающей силы F /фиг. 2/, являющейся прямой функцией силы Q /фиг. 3/, служит система формирования силы прижатия 25, содержащая механизм нагружения 23, механизм самоподтягивания 24 и дифференциальный механизм 35.
Механизм нагружения 23 классифицируется как шариковинтовой с возможностью самозатягивания под действием крутящего момента переменного направления и содержит нажимные кольца 26, 27 /фиг. 1, 7, 8, 9/, расположенные слева и справа от поперечной перегородки 2 корпуса и взаимодействующие посредством шариков 28 /фиг. 6, 9/, размещающихся свободно в отверстиях поперечной перегородки 2 и в канавках C нажимных колец 26, 27 /фиг. 9/.
Эти канавки имеют сечение полукруглой формы с радиусом, несколько превышающим радиус шарика 28, и винтовую форму с постоянным углом подъема и выходом на обе стороны. Таким образом, каждая канавка C снабжена поверхностями с левой и правой винтовой спиралями. Через нажимные кольца 26, 27 и осевые опоры 19 механизм нагружения 23 взаимодействует с сателлитами 13 обоих планетарных механизмов. Нажимные кольца 26, 27 снабжены зубчатыми венцами 29, 30 /фиг. 1, 6, 7 и 8/ для обеспечения кинематической связи посредством зубчатых колес 31, 32 /фиг. 6, 7, 8/, установленных подвижно на осях 33 /фиг. 6, 7, 8/ в перегородке 2 корпуса с помощью кронштейнов 34 /фиг. 7, 8/. Колеса 31, 32 зацепляются друг с другом.
Механизм самоподтягивания 24 по типу - автоматический шариковинтовой с возможностью самозатягивания под действием крутящего момента переменного направления. По принципу устройства он аналогичен механизму нагружения 23. Механизм самоподтягивания 24 содержит два нажимных кольца 45 и два нажимных кольца 46 /фиг. 1, 4, 5/, взаимодействующих через шарики 47 /фиг. 4, 5/. Ведущие нажимные кольца 45 неподвижно связаны с внутренним ведущим валом 18 /фиг. 1/, а ведомые нажимные кольца 46 связаны неподвижно со ступицами 22 ведущих колес 10 /фиг. 1/. Как видно из фиг. 1, ведущие нажимные кольца 45 расположены снаружи относительно ведомых нажимных колец 46.
В системе формирования силы прижатия 25 механизм самоподтягивания 24 предназначен для автоматической выборки зазоров между рабочими поверхностями сателлитов 13, колесом 11 и опорами 19, 20, 21. Кроме того, благодаря механизму 24 достигается исходная величина силы прижатия F во фрикционной передаче. Расчетная же величина силы прижатия обеспечивается за счет механизма нагружения 23.
Дифференциальный механизм 35 /фиг. 1/ содержит водило 36, неподвижно связанное с внутренним ведомым валом 37, внутреннее центральное колесо 38, связанное неподвижно с ведомым валом 6 /фиг. 1/, сателлиты 39 и наружное центральное колесо 40, подвижно установленное в крышке 4 корпуса 1 и связанное с механизмом нагружения 23 /фиг. 1/ за счет зубчатого сектора 41 и зубчатых колес 42, 43, неподвижно соединенных с валом 44. Колесо 43 входит в зацепление с зубчатым венцом 30 нажимного кольца 27 /фиг. 1, 7/.
Функциональная зависимость силы прижатия F в контакте фрикционной передачи от сателлита 13 к ведомому колесу 11, графически иллюстрируемая четырехугольником сил, действующих на сателлит /фиг. 3/, достигается за счет внешней формы сателлита, конкретно же, за счет параметров его рабочих конических поверхностей и их взаимного расположения /фиг. 1, 2/. Основная коническая поверхность И сателлита направлена вершиной в сторону периферии. Обе дополнительные конические поверхности К и Л направлены вершинами к оси вариатора, т.е. противоположно основной поверхности И. Углы α /фиг. 2/ при вершинах дополнительных рабочих конических поверхностей равны. Величина угла α такова, что образующие конические поверхностей К, Л по одну сторону сателлита расположены перпендикулярно к оси вариатора, а по другую сторону сателлита они наклонены к оси вариатора под углом β , который принимается в пределах от 4 до 10o.
Оптимальность внешней формы сателлита /взаимного расположения и параметров рабочих конических поверхностей/ очевидна из фиг. 3. Как видно, усилие Q имеет относительно малую величину, а каждая из реактивных сил R, S по величине меньше, чем полезная сила прижатия F.
Для обеспечения равновесия сателлитов 13 существенное значение имеет взаимное расположение - в осевом направлении - вершин дополнительных конических поверхностей К, Л. /фиг. 2/. Исходя из этого, вершины дополнительных конических поверхностей разнесены в осевом направлении на требуемое расстояние, обеспечивающее уравновешивание сателлитов.
Сателлиты 13 связаны с осями 14 /фиг. 1/ подвижно, образуя подшипник скольжения. Имеется также возможность перемещения сателлита вдоль оси 14. Для предотвращения нагружения скользящих подшипников сателлитов и оси 14 действующими силами F, Q, R, S /фиг. 2/ обеспечены условия самоустанавливаемости /"плавающей" установки/ сателлита 13 в плоскости действия перечисленных сил. Самоустанавливаемость сателлитов 13 обеспечена за счет призматической формы цапф 15, 16 осей 14 /фиг. 1/, подвижно соединенных с прямоугольными пазами водила 9, а также за счет возможности перемещения сателлита вдоль оси 14.
Для перемещения ведомых колес 11 /фиг. 1/ - на синхронное сближение или удаление - предназначено устройство 48 /фиг. 1/, содержащее три винта 49, расположенных равномерно по окружности. Винты 49 имеют симметрично расположенные относительно перегородки 2 корпуса участки Х, Ц /фиг. 1/ трапецеидальной резьбы, имеющие противоположные направления нарезки, и воздействуют на ведомые колеса 11 через гайки 50 и 51 /фиг. 1/ и поводки 52, 53, сопрягающиеся подвижно вкруговую с колесами 11. Винты 49 снабжены неподвижно прикрепленными шестернями 54, которые входят в зацепление с центральным зубчатым колесом 55. Колесо 55 взаимодействует через шестерню 56 с валом управления 57, установленным на подшипниках в крышке 3 /фиг. 1/ и выходящим наружу из корпуса 1.
Для соединения ведомых колес 11 с внутренним ведомым валом 37 /фиг. 1/ служат полуоси 58, 59, соединенные с колесами 11 подвижно в осевом направлении за счет прямолинейных выступов Щ на колесах и прямобочных пазов Ш в полуосях.
Соосное расположение ведущего вала 5 относительно ведомого вала 6 достигается за счет применения на входе в вариатор планетарного механизма 60 /фиг. 1/, выполненного по типу 2К-Н, имеющего передаточное число i = 1, 0. Водило 61 этого планетарного механизма неподвижно связано с полуосью 58 и с внутренним ведомым валом 37, центральное колесо 62 связано неподвижно с ведущим валом 5, а второе центральное колесо 63, число зубьев которого равно числу зубьев колеса 62, связано неподвижно с внутренним ведущим валом 18. Полуось 59 неподвижно связана с водилом 36 /фиг. 1/ дифференциального механизма 35.
Работает фрикционный реверсивный вариатор следующим образом. Вращение ведущего вала 5 /фиг. 1/ сообщается центральному колесу 62 планетарного механизма 60. Поскольку передаточное число планетарного механизма 60 равно 1,0 /числа зубьев колес 62, 63 равны/, то вращение со скоростью вала 5 сообщается центральному колесу 63, внутреннему ведущему валу 18 и через механизм самоподтягивания 24 сообщается ведущим колесам 10. Сателлиты 13, находясь в зацеплении своими зубчатыми венцами 17 с ведущими колесами 10 и неподвижными колесами 12, а также - через оси 14 - во взаимодействии с водилом 9 и с опорами 19, 20, 21, приходят в планетарное движение, увлекая за собой водило 9. Геометрические оси "в-в" сателлитов 13 /фиг. 2/ перемещаются в пространстве, имея постоянное пересечение с осью "а-а" вариатора. Механизм самоподтягивания 24 обеспечивает выборку зазоров между рабочими поверхностями сателлитов 13 и сопрягаемыми деталями. Одновременно достигается предварительное прижатие сателлита к ведомому колесу 11.
В случае, если точка контакта ведомого колеса 11 совпадает с полюсом P /фиг. 1, 2/, имеющим нулевую линейную скорость, ведомые колеса 11 не вращаются, т.е. имеют нулевую вращательную скорость. Передаточное число вариатора в этом случае бесконечно /i = ∞ /.
Вращением вала управления 57 /фиг. 1/ через зубчатые колеса 54, 55 и 56, через винты 49, гайки 50, 51 и кольцеобразные поводки 52, 53 достигается синхронное взаимное сближение или удаление ведомых колес 11. При этом они получают за счет силы трения с сателлитами 13 вращательное движение, так как точка M контакта этих колес переходит к точкам основной конической поверхности И /фиг. 1, 2/, имеющим скорость, пропорциональную удаленности от полюса P. Далее движение передается с колес 11 двумя путями: через выступы Щ и пазы Ш /фиг. 1/ на полуоси 58, 59 и через водила 36, 61 - на внутренний ведомый вал 37, который суммирует два потока передаваемой мощности. От водила 36 приобретают планетарное движение сателлиты 39 дифференциального механизма 35, которые сообщают вращение внутреннему центральному колесу 38 и ведомому валу 6, благодаря тому, что наружное колесо 40 дифференциального механизма 35 является его звеном, остановленным за счет связи с механизмом нагружения 23 /фиг. 1/. Эта связь обеспечивается за счет зубчатого сектора 41, неподвижно связанного с колесом 40, колеса 42, вала 44 и колеса 43, зацепляющегося с зубчатым венцом 30 нажимного кольца 27 /фиг. 1, 6, 7, 8/.
Крутящий момент, возникающий на наружном колесе 40 дифференциального механизма, благодаря вышеописанной связи, передается нажимному кольцу 27, а от него за счет колес 31, 32 /фиг. 6, 7, 8/ момент противоположного направления передается на нажимное колесо 26 /фиг. 1, 7, 8/. В результате этого нажимные кольца 26, 27, взаимодействуя винтовыми канавками C /фиг. 9/ через шарики 28 /фиг. 6 и 9/ создают осевые усилия, передаваемые через подшипники качения и осевые опоры 19 на сателлиты 13 обоих планетарных механизмов. Это силы Q /фиг. 2/ - внешнего нагружения. За счет взаимодействия сателлита 13 с ведомым колесом 11, а также опорами 20, 21 сила Q преобразуется в полезную силу F /фиг. 2, 3/, обеспечивающую прижатие во фрикционной передаче. Направление силы Q не зависит от направления крутящего момента, сообщаемого нажимному кольцу 26, таким образом, не зависит от направления крутящего момента на ведомом валу 6. Эта независимость объясняется тем, что канавки C /фиг. 9/ нажимных колец 26, 27 имеют выход на две стороны, обеспечивая две винтовые линии противоположного направления.
Как сила Q, так и сила F пропорциональны крутящему моменту колеса 40, и, как следствие, моменту на ведомом валу 6. Передаточное число связи от вала 6 к осевой опоре 19 таково, что сила F превосходит в 1,25 - 1,40 раза необходимую расчетную силу, требуемую для передачи мощности. Оптимальность системы 25 формирования силы прижатия во фрикционной передаче в части обеспечения запаса сил трения состоит в том, что названный запас /1,25 - 1,40/ не зависит от величины нагрузки на ведомом валу 6, а является постоянным во всем диапазоне изменения внешней нагрузки.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОМОБИЛЬНЫЙ ВАРИАТОР | 1998 |
|
RU2175415C2 |
| ВАРИАТОР НА ОСНОВЕ ШЕСТЕРНИ ИЗМЕНЯЕМОГО ДИАМЕТРА | 2013 |
|
RU2563294C2 |
| АВТОМАТИЧЕСКИЙ ВАРИАТОР ФМВ | 1995 |
|
RU2088428C1 |
| Планетарный редуктор | 1990 |
|
SU1740827A1 |
| ЗУБЧАТАЯ ПЕРЕДАЧА С ПЕРЕМЕННОЙ СКОРОСТЬЮ | 2003 |
|
RU2247271C2 |
| ЗУБЧАТАЯ ОБГОННАЯ МУФТА | 2007 |
|
RU2353835C2 |
| Механическая трансмиссия | 1991 |
|
SU1796827A1 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ ПОРШНЕЙ В ЦИЛИНДРАХ ПОРШНЕВОГО РОТОРА ВО ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ РОТОРА И ПЕРЕДАТОЧНЫЙ МЕХАНИЗМ | 2012 |
|
RU2518136C2 |
| Планетарный фрикционный вариатор | 1979 |
|
SU950985A1 |
| ЗУБЧАТАЯ ОБГОННАЯ МУФТА | 2005 |
|
RU2298711C2 |






Использование: фрикционный реверсивный вариатор предназначен для непрерывного преобразования мощности по вращательной скорости и крутящему моменту. В симметрично расположенных и параллельно связанных планетарных механизмах типа ЗК сателлиты имеют соосные рабочие конические поверхности- основную и две дополнительных. Сателлиты образуют конические передачи с центральными колесами: с ведомым колесом фрикционную, а с ведущим и неподвижным -зубчатые. Система формирования силы прижатия во фрикционной передаче содержит кроме механизма самоподтягивания еще нагружающий механизм, который посредством зубчатых передач и дифференциального механизма связан с ведомым валом. Система уравновешивания сателлитов снабжена, вращательнными опорами. Ведущий и ведомый валы вариатора соосны. 5 з.п.ф-лы, 9 ил.