Предлагаемое изобретение относится к зубчатым передачам с переменной скоростью вращения ведомого вала, в частности к передачам, содержащим червяк с червячным колесом.
Различные отрасли промышленности испытывают большую потребность в зубчатых передачах с управляемым в широких пределах изменением передаточного отношения между ведущим и ведомым валами. Типичным решением этой задачи может служить зубчатый механизм коробки передач, в которой на двух параллельных валах установлены группы зубчатых колес различного диаметра, поочередно соединяемых между собой, чем в широких пределах изменяется передаточное отношение между валами (см., например, И.И.Артоболевский. Механизмы в современной технике, т.III, "Наука", М., 1973, стр. 456).
Недостатком таких передач является дискретность изменения передаточного отношения, что в ряде случаев недопустимо.
Плавное (бесступенчатое) изменение передаточного отношения в зубчатой передаче может быть получено, например, при использовании улиточного механизма с винтовым движением звеньев или со спирально-коническим колесом (см. там же, стр. 59 и 61 соответственно). Однако в таких механизмах невозможно зафиксировать промежуточное передаточное отношение между его крайними значениями.
В свете изложенных недостатков в технике для плавного изменения передаточного отношения кинематическим путем используются преимущественно фрикционные передачи (гидравлические и электрические средства изменения передаточного отношения, использующие иные средства преобразования, в материалах настоящей заявки не рассматриваются).
Все фрикционные передачи при их конструктивном разнообразии основаны на общем принципе работы - передача крутящего момента через фрикционно взаимодействующие пары, как, например, "Автоматическая бесступенчатая передача" по патенту Р.Ф. №2091637, F 16 H 15/50, которую с учетом авторитета ее создателя можно считать наиболее прогрессивной в данной области техники. Однако, как и все прочие фрикционные передачи, она имеет общий для них недостаток - передает крутящий момент через фрикционно взаимодействующие элементы, для которых характерны пробуксовка, чувствительность к чистоте взаимодействующих поверхностей, срок службы, ограниченный выбором материала фрикционных элементов и т.д.
За прототип заявленного изобретения может быть выбран зубчатый планетарный механизм с червячным зацеплением по И.И.Артоболевскому, т.III, стр. 480, который по своему существу хотя и не является передачей с переменной скоростью, но по совокупности существенных конструктивных признаков наиболее близок к заявленному изобретению.
Известный механизм содержит червячную передачу, вал червяка которой является ведущим, а на валу червячного колеса жестко насажено центральное малое зубчатое колесо планетарной передачи, имеющее наружные зубья. Малое центральное колесо связано сателлитами с большим неподвижным центральным колесом, имеющим зубья. Водило сателлитов служит ведомым валом механизма.
Известный механизм по своему существу является обычным двухступенчатым редуктором с большим передаточным отношением (первая ступень - червячный редуктор, вторая - планетарный) и не может менять передаточное отношение между ведущим и ведомым валами.
Перед заявленным изобретением была поставлена задача создать бесступенчатую зубчатую передачу, позволяющую менять передаточное отношение между ведущим и ведомым валами с возможностью фиксации любого передаточного отношения между его крайними значениями.
Поставленная задача решается тем, что предложена зубчатая передача, содержащая червячный редуктор, вал которого служит ведущим валом передачи, связанный с планетарным, включающим водило, несущее, по меньшей мере, два сателлита, взаимодействующие с малым центральным зубчатым колесом наружного зацепления и большим центральным зубчатым колесом внутреннего зацепления планетарного редуктора.
Новым в предложенной передаче является то, что червяк смонтирован на своем валу с возможностью свободного вращения и принудительного осевого смещения и кинематически связан с одним сателлитом планетарного редуктора, а вал - с другим сателлитом, кинематически связанным с червячным колесом, ось которого свободно-вращательно установлена на водиле сателлитов, при этом ось вращательно смонтированного большого центрального колеса служит ведомым валом передачи, соосным ведущему, а червяк взаимодействует с управляющим нажимным подшипником.
Технический результат заявленного устройства заключается в создании зубчатой передачи с бесступенчато управляемым изменением передаточного отношения между ведущим и ведомым валами с возможностью фиксации любого передаточного отношения между его крайними значениями.
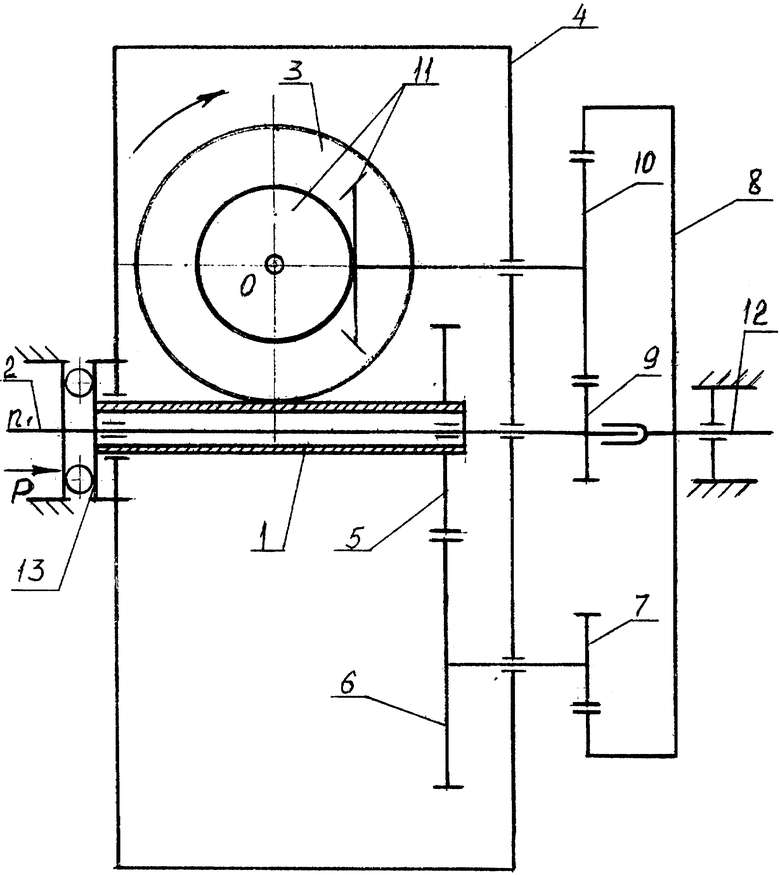
На чертеже приведена кинематическая схема заявленной передачи.
Заявленная передача содержит червячную пару, червяк 1 которой смонтирован на своем валу 2 с возможностью свободного вращения и осевого перемещения (смешения). Ось “О” червячного колеса 3, взаимодействующего с червяком 1, смонтирована на водиле 4 планетарного редуктора. Сам червяк 1 через цилиндрические шестерни 5 и 6 кинематически связан с одним из сателлитов 7, входящим в зацепление с внутренними зубьями большого центрального колеса 8 планетарного редуктора. Вал 2 червяка через малое центральное зубчатое колесо 9 и другой сателлит 10 также связан с большим центральным колесом 8 планетарного редуктора. В свою очередь, сателлит 10 кинематически связан с червячным колесом 3, например, парой конических колес 11.
В отличие от известных планетарных редукторов большое центральное колесо 8 смонтировано с возможностью вращения, при этом его вал 12 служит ведомым валом передачи.
Передача имеет нажимной подшипник 13, воздействующий в осевом направлении на червяк 1. В общих чертах заявленная передача представляет собой два редуктора - червячный и планетарный, кинематически связанные между собой.
Перед описанием работы заявленной передачи в целом следует пояснить особенности взаимодействия некоторых ее элементов.
Червячная пара. Общеизвестно, что при передаче вращения от червяка к червячному колесу на червяке возникает большая осевая нагрузка, равная окружному усилию на червячном колесе. Указанная осевая нагрузка на червяк является недостатком червячной пары.
В заявленной передаче этот недостаток червячной пары становится ее преимуществом, т.к. приложенная к червяку через нажимной подшипник 13 осевая нагрузка является регулирующей, которая преобразуется в окружное усилие на червячном колесе. В результате на червячном колесе возникает момент сопротивления вращению, который через коническую пару 11 и сателлит 10 передается на большое центральное колесо 8. В случае, когда момент сопротивления вращению на центральном колесе 8 превысит момент нагрузки на выходном вале 12, последний начнет вращаться.
Планетарный редуктор. В заявленной передаче планетарный редуктор в завуалированном виде представляет собой суммирующий механизм. Общий принцип работы любого суммирующего механизма (на примере общеизвестного дифференциала) заключается в том, что при двух ведущих валах его ведомый вал будет вращаться с переменной скоростью вплоть до полной его остановки в зависимости от скорости и направления ведущих валов.
В свете описанных общеизвестных особенностей работы червячной пары и суммирующего механизма рассмотрим работу заявленной передачи в двух ее крайних случаях.
Случай первый. Червяк 1 и червячное колесо 3 находятся, условно говоря, в бесконтактном взаимодействии. Это возможно тогда, когда червяк и колесо вращаются от независимых приводов синхронно. В данном случае червячное колесо будет получать независимое вращение от ведущего вала 2 через кинематическую цепь, содержащую цилиндрическую шестерню 9, сателлит 10 и пару конических колес 2. При неподвижном центральном колесе 8 сателлит 10 начинает обкатываться по внутренним зубьям большого центрального колеса 8, увлекая за собой водило 4, т.е. при этом одновременно с вращением червячного колеса 3 его ось "О" получит от водила (и вместе с ним) пространственное вращение вокруг червяка 1. В то же время водило 4, увлекая за собой другой сателлит 7, начнет обкатывать его по внутренним зубьям колеса 8. Вращаясь, сателлит 7 через шестерни 6 и 5 начнет вращать червяк 1 синхронно вращению червячного колеса 3, т.е. взаимодействие червяка 1 и колеса 3 будет, условно говоря, бесконтактным за счет их независимого синхронного вращения (трение между зубьями червяка и колеса отсутствует). Синхронность их вращения обеспечивается соответствующим передаточным отношением зубчатых элементов в их кинематических приводных цепях. При этом скорость (частота) вращения ведомого вала 12 будет нулевой.
Случай второй. Путем приложения осевой нагрузки на червяк 1 (через нажимной подшипник 13) он сместится до вступления в контакт с зубьями колеса 3 (нагрузка направлена против направления вращения колеса 3). При соответствующем осевом усилии произойдет "заклинивание" червяка и колеса, т.е. вращение колеса 3 относительно своей оси "О" заблокируется. Очевидно, что в этом случае прекратится вращение вокруг своей оси и сателлита 10, который, перестав обкатываться по внутренним зубьям колеса 8, начнет вращать его вместе с водилом 4. Блокировка относительного ("нормального") вращения колеса 3 и червяка 1 вызовет также и прекращение обкатки сателлита 7 по зубьям колеса 8, т.е. сателлит 7 подобно сателлиту 10 будет увлекать колесо 8, вращая его вместе с водилом 4. Таким образом, при полной блокировке вращения червячного колеса 3 относительно своей оси "О" частота вращения ведомого вала 12 будет равна частоте вращения ведущего вала 2.
Легко понять, что между крайними значениями частоты вращения ведомого вала 12, обусловленными или бесконтактным взаимодействием червяка 1 и колеса 3, или их взаимной блокировкой, можно получить любую требуемую частоту вращения ведомого вала 12, изменив осевую нагрузку на червяк 1 (изменив его аксиальное смещение посредством управляющего нажимного подшипника 13).
Следует особо отметить, что трение между зубьями червяка 1 и колеса 3 ни в коей мере не эквивалентно трению фрикционных элементов в общеизвестных вариаторах, поскольку между зубьями червяка и колеса в заявленной передаче трение не превышает возникающего при работе общеизвестных червячных пар, т.е. не превышает их обычных рабочих нагрузок (то же относится и к нажимному подшипнику 13). Более того, если в общеизвестной червячной паре с увеличением оборотов ведомого вала увеличивается скорость скольжения между зубьями червяка и колеса и соответственно падает КПД передачи за счет потерь на трение, то в заявленной передаче наоборот с увеличением частоты вращения ведомого вала 12 скорость относительного скольжения между зубьями червяка и колеса падает, в предельном значении превращаясь в нулевую (соответственно исчезают потери на трение) и КПД передачи возрастает.
На основании изложенного заявленную передачу в первом приближении можно было бы отнести к зубчатому вариатору, однако в полном объеме это было бы неправомерным, поскольку заявленная передача теряет некоторые свойства общеизвестных вариаторов.
Так, характерной особенностью общеизвестного вариатора является увеличение крутящего момента на ведомом валу с уменьшением частоты его вращения. Заявленная же передача этим свойством не обладает, поскольку крутящий момент на ведомом валу зависит от передаточных отношений в ее кинематических цепях, которые остаются неизменными в процессе работы, и крутящий момент на ведомом валу не может превышать крутящего момента на ведущем. Тем не менее, во многих областях техники требуются зубчатые передачи, в которых необходимо бесступенчатое изменение частоты вращения ведомого вала, а в изменении величины крутящего момента нет надобности.
Например, в настоящее время большую проблему представляет собой изменение в процессе работы частоты вращения вала асинхронного двигателя переменного тока, массово применяемого в технике. Сегодня для этого применяются сложные тиристорные управляющие системы, меняющие частоту питающего тока (частоту вращения магнитного поля на статоре двигателя). Масса и габариты этих систем зачастую превышают весогабаритные характеристики управляемого двигателя, не говоря уже о сложности их обслуживания.
Заявленная передача в комбинации с известным асинхронным двигателем переменного тока позволяет простыми средствами получить легко управляемую переменную скорость вращения его вала (в особых случаях возможно применение обратной связи между числом оборотов ведомого вала и усилием воздействия на нажимной управляющий подшипник).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРЕОБРАЗОВАНИЯ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ ПОРШНЕЙ В ЦИЛИНДРАХ ПОРШНЕВОГО РОТОРА ВО ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ РОТОРА И ПЕРЕДАТОЧНЫЙ МЕХАНИЗМ | 2012 |
|
RU2518136C2 |
| ПЛАНЕТАРНАЯ ПЕРЕДАЧА С РЕГУЛИРУЕМЫМ ПЕРЕДАТОЧНЫМ ОТНОШЕНИЕМ | 2019 |
|
RU2712714C1 |
| ПРИВОД КОЛЕСА ВЕЛОСИПЕДА | 2015 |
|
RU2622734C2 |
| Планетарный редуктор | 1990 |
|
SU1754988A1 |
| ШИРОКОДИАПАЗОННАЯ РЕВЕРСИВНАЯ ТРАНСМИССИЯ | 2020 |
|
RU2729847C1 |
| СПОСОБ РАСПРЕДЕЛЕНИЯ МОЩНОСТИ ДЛЯ ДИФФЕРЕНЦИАЛА ТРАНСПОРТНЫХ СРЕДСТВ | 1999 |
|
RU2156902C1 |
| МЕХАНИЗМ РАСПРЕДЕЛЕНИЯ МОЩНОСТИ ДЛЯ ПРИВОДА ВЕДУЩИХ ОСЕЙ И КОЛЕС ТРАНСПОРТНОГО СРЕДСТВА | 1997 |
|
RU2125673C1 |
| ЭЛЕКТРОПРИВОД ЗАПОРНОЙ АРМАТУРЫ | 1996 |
|
RU2076255C1 |
| ФРИКЦИОННЫЙ РЕВЕРСИВНЫЙ ВАРИАТОР | 1995 |
|
RU2112900C1 |
| Планетарный редуктор | 1990 |
|
SU1740827A1 |
Изобретение относится к машиностроению и может быть использовано в зубчатых передачах с переменной скоростью вращения ведомого вала. Зубчатая передача содержит планетарный редуктор и взаимодействующую с ним червячную пару, червяк 1 которой смонтирован свободно вращательно с возможностью управляемого осевого смещения на ведущем валу передачи и кинематически связан с сателлитом 7 планетарного редуктора. Ведущий вал 2 несет малое центральное колесо 9 планетарного редуктора и кинематически связан с сателлитом 10 планетарного редуктора. Сателлит 10 кинематически связан с червячным колесом 3. Ось колеса 3 свободно вращательно установлена на водиле 4. Ось большого центрального колеса 8 планетарного редуктора служит ведомым валом передачи. Технический результат - создание бесступенчатой передачи, позволяющей менять передаточное отношение между ведущим и ведомым валами с возможностью фиксации любого передаточного отношения между его крайними значениями. 1 ил.
Зубчатая передача с переменной скоростью, содержащая планетарный редуктор и взаимодействующую с ним червячную пару, червяк которой смонтирован с возможностью управляемого осевого смещения, отличающаяся тем, что червяк смонтирован свободно вращательно с возможностью управляемого осевого смещения на ведущем валу передачи и кинематически связан с одним сателлитом планетарного редуктора, а ведущий вал, несущий малое центральное колесо редуктора, - с другим сателлитом, кинематически связанным с червячным колесом, ось которого свободно вращательно установлена на водиле сателлитов, при этом ось вращательно смонтированного большого центрального колеса редуктора служит ведомым валом передачи.
| US 3529493 A, 22.09.1970 | |||
| Планетарные передачи | |||
| Справочник | |||
| Под ред | |||
| КУДРЯВЦЕВА В.Н | |||
| - М.: Машиностроение, 1977, с.10, рис | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Б.А.ПРОНИН, Г.А.РЕВКОВ | |||
| Бесступенчатые, клиноременные и фрикционные передачи | |||
| - М.: Машиностроение, 1980, с.199, рис | |||
| Говорящий кинематограф | 1920 |
|
SU111A1 |
| Двухскоростное приводное устройство | 1969 |
|
SU323989A1 |
| МЕХАНИЗМ ТРАНСФОРМАЦИИ МЯГКОЙ МЕБЕЛИ | 2014 |
|
RU2570786C1 |

