Изобретение относится к учебно-тренировочным средствам и может быть использовано для обучения водителей гусеничных машин.
Как известно, резонансные скорости движения, сопровождающиеся большими колебаниями корпуса гусеничной машины, находятся в диапазоне наиболее часто встречающихся скоростей движения (28-36 км/ч). Поэтому методика обучения вождению предусматривает привитие навыков у водителей в преодолении резонансного режима при движении по неровностям, которое представляет для них определенную психологическую и физическую трудность.
В практике обучения вождению плавность хода машины, являясь важнейшим показателем обученности, оценивается по величине вертикальных ускорений и вызываемых ими перегрузок, измеряемых на месте водителя. Исследования показали, что плавность хода в зависимости от класса вождения характеризуется спектральной характеристикой вертикальных ускорений корпуса машины. Так, например, водители 1-го класса, двигаясь по неровностям с более высокой скоростью, допускают на 1 км пути максимально возможные безопасные перегрузки порядка 2-3g в среднем 6-8 раз, а малоопытные - 1-2 раза. Излишне "мягкая" для машины плавность хода вовсе не является достоинством, поскольку это непременно ведет к снижению средней скорости движения.
Жесткие удары, сопровождающиеся перегрузками свыше 3g на месте водителя, вызывающие быстрое утомление, а в некоторых случаях и травмы, у водителя высокого класса почти не наблюдаются, тогда как у недостаточно опытных водителей они имеют место на многих препятствиях. Таким образом, плавность хода гусеничных машин можно считать достаточной, если количество случаев перегрузок в диапазоне 2-3g соответствует числу вертикальных препятствий на маршруте и нет жестких ударов машины о грунт, при котором вертикальные ускорения превышают 3g.
Для количественного измерения спектральной характеристики плавности хода гусеничной машины при обучении вождению разработан бортовой прибор АМ-10Т [1].
Этот прибор выполнен на базе серийного авиационного акселерометра АМ-10, изменяющего плавное нарастание перегрузок от 1 до 10g и фиксирующего наибольшее их значение (см. Акселерометр типа АМ-10. Краткое описание и инструкция по монтажу и эксплуатации. - М.: Воениздат, 1954, с. 6) и дополнительно содержит демпферы- успокоители, электроконтактную группу, копир и три счетчика импульсов. Прибор содержит два инерционных груза, подрессоренных пружинами и связанных через передаточный механизм со стрелкой индикатора. Демпфирование осуществляется двумя тормозами-успокоителями, представляющими собой изогнутые пружинящие пластины. Грузы, перемещаясь под действием отрицательных ускорений в вертикальной плоскости, касаются пластин. На одном из зубчатых секторов, связывающих между собой оси инерционных грузов, закреплен копир, выполненный в виде фигурной скобы. В корпусе прибора установлены три пары нормально открытых контактов, снабженных стерженьками, на которые воздействует копир при перемещении инерционных грузов. Для подсчета количества перегрузок по трем диапазонам служит блок счетчиков электрических импульсов. Для указания максимальной величины перегрузки имеется максиметр-указатель, перемещающийся вместе с основной стрелкой. В исходное положение этот указатель возвращается нажатием кнопки механизма сброса. Шток механизма сброса имеет фигурные пазы, с помощью которых приводятся в действие зубчатые секторы, возвращающие указатель максиметра на нуль. Прибор с помощью кронштейна крепится в носовой части кабины машины.
Работа прибора основана на действии сил инерции на массу, помещенную на плече таким образом, что она в пределах определенного угла свободно поворачивается вокруг оси прибора в плоскости шкалы прибора. При положительных ускорениях корпуса машины в вертикальной плоскости инерционные грузы отклоняют стрелки индикатора и указателя максиметра на угол, пропорциональный величине перегрузки, и одновременно через копир воздействует на соответствующие контакты, замыкая цепи питания счетчиков электрических импульсов. При уменьшении величины или смене знака ускорения инерционные грузы перемещаются в обратном направлении и копир сходит с контактов.
При работе прибора в режиме самообучения водитель имеет возможность, оценив величину допущенной перегрузки в каждом конкретном случае удара о грунт или на препятствии, самостоятельно устанавливать указатель вновь на нуль.
Наблюдая за текущими показаниями вертикальных ускорений, водитель учится водить машину с такой скоростью, чтобы перегрузки были близки к верхнему допустимому пределу, но не превышали 3g.
Благодаря таким тренировкам сравнительно быстро приобретается навык в ощущении допустимых перегрузок. Без прибора этот навык вырабатывается лишь в результате длительной практики вождения машины. Однако практика показывает, что обучение водителей с использованием существующих приборов оценки плавности хода имеет ряд недостатков. Стрелочный указатель величины максимальной перегрузки крепится в носовой части машины, вне основного сектора поля зрения водителя. Поэтому ему необходимо периодически переключать внимание от наблюдения за местностью на считывание показаний прибора, что ведет к нарушению мер безопасности, так как при движении на высоких скоростях даже кратковременное переключение внимания от внешней обстановки может привести к аварийной ситуации и в связи с этим не позволяет своевременно определить момент достижения предельной величины ускорений на данной неровности маршрута.
Из-за низкой надежности контакта между копиром и контактной группой при окислении и загрязнении не передается информация с контактной группы к счетчикам, что нарушает принцип объективности результатов вождения.
Оценив величину допущенной перегрузки в каждом конкретном случае удара машины о грунт, водитель должен для последующих оценок величин допущенных перегрузок самостоятельно устанавливать стрелку максиметра вновь на нуль, отвлекаясь при этом от наблюдения за местностью.
При контроле вождения необходимо записывать начальные показатели счетчиков после каждого заезда для подсчета числа допущенных перегрузок в каждом диапазоне.
Указанные недостатки не позволяют полностью реализовать высокие скоростные свойства систем подрессоривания, заложенные в современных гусеничных машинах, что позволяет вести поиск более совершенных учебно-тренировочных средств обучения вождению.
С этой целью разработано устройство для оценки плавности хода, которое может быть использовано при обучении вождению различных гусеничных машин.
На фиг. 1 показана структурная схема предлагаемого устройства.
Схема содержит следующие элементы: блок 1 компараторов фиксации превышения удара, входами соединенный с выходом блока 2 датчиков регистрации вертикальных ускорений непосредственно и через схему 3 установки уровней удара с первым выходом блока 4 управления, а выходом, через усилитель 5 - с входом одновибратора 6. Первый выход этого одновибратора соединен с эмиттерным повторителем 7 схемы световой индикации светодиодных индикаторов 8 смотрового прибора водителя, а второй выход - с входом электронного блока 9 счетчика предельных ускорений, второй вход которого соединен через блок 10 формирования сигнала автоматического сброса индикации со вторым выходом блока управления, соединенного первым входом через схему 11 цифровой индикации предельных ускорений с первым выходом электронного блока счетчиков, второй выход счетчиков блока соединен с выходом сумматора 12 информации о величинах допустимых ускорений, соединенного выходом с одним входом блока 13 разрешения передачи, другой вход которого связан с третьим выходом блока управления, а выход подключен к первому входу блока 14 деления, соединенного вторым входом с четвертым выходом блока управления, а выходом - с одним входом блока 15 вычитания (сравнения), другой вход которого подключен к задатчику 16 установки оценочных показателей качества вождения, соответствующих эталонным, а выход - к входу индикатора оценки 17. При этом обучаемый обозначен позицией 18.
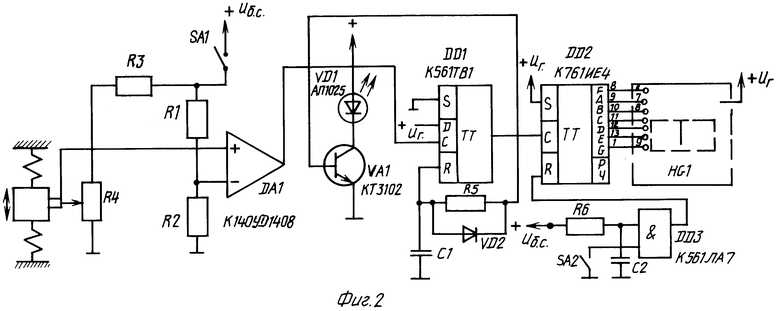
Принципиальная схема устройства, показанная на фиг.2, содержит датчик регистрации ударов с подвижным контактом и резистором R4, компаратор удара ДА1 на микросхеме К140УД1408, цепь установки уровня удара на резисторах R1 и R2, одновибратор, выполненный на элементе ДД1, конденсаторе C1, диоде УД2 и резисторе R5, который обеспечивает управление ключом на транзисторе УТ1, разрешающем включение индикатора на светодиоде УД1 типа АЛ102Б. Длительность импульса на выходе микросхемы ДД1 составляет 2 с. На схеме также показаны счетчик числа предельных ускорений на элементе ДД2, жидкокристаллический четырехразрядный цифровой индикатор ИЖЦ5-4/8 числа предельных ускорений, схема сброса счетчика, собранная на микросхеме ДД3, переключатель SA2, управляющий режимом работы.
Работа устройства осуществляется следующим образом.
Перед началом выполнения упражнения инструктор обучения устанавливает в задатчик 16 оценочных показателей значения вертикальных ускорений корпуса машины, соответствующие эталонным для данной конструкции гусеничной машины и состояния трассы заданного маршрута движения.
В момент трогания машины счетчик времени, расположенный в блоке 4 управления, начинает счет времени движения по трассе упражнения. В процессе движения обучаемого по неровностям трассы в блок компараторов 1 фиксации превышения удара поступают сигналы, соответствующие величине допущенной перегрузки в каждом конкретном случае удара машины о грунт или на препятствии от блока 2 датчиков регистрации вертикальных ускорений. При превышении величин ударов корпуса машины заданного схемой 3 установки уровней удара предела на выходе компараторов блока 1 появляется сигнал, который поступает через усилитель 5 в схему задержки на одновибраторе 6, управляющего частотой переработки информации. Формируемый на выходе одновибратора импульс, через эмитторный повторитель включает светодиодный индикатор, расположенный в смотровом приборе водителя.
Текущая информация о плавности хода машины и о степени реализации обучаемым возможностей системы подрессоривания отображается на логических элементах 7 схемы свтодиодных индикаторов 8, расположенных в смотровом приборе водителя.
Благодаря световой индикации ускорений корпуса машины обучаемый наглядно видит величину допущенных ударов и одновременно учится водить машину с такой скоростью, чтобы перегрузки были близки к верхнему допустимому пределу, но не превышали 3g.
В то же время информация о плавности хода машины поступает с одновибратора 6 и на электронный блок 9 счетчиков предельных ускорений. Эта информация представляет собой, например, количество зафиксированных вертикальных ускорений по трем диапазонам предельных ускорений. С выходов электронного блока счетчиков 9 импульсов предельных ускорений электрические сигналы поступают на схему 11 цифровой индикации измеренных значений вертикальных ускорений, превышающих допустимую величину, благодаря которой обучаемый сравнительно быстро приобретает опыт в ощущении допустимых перегрузок и на сумматор 12. По сигналу окончания выполнения упражнения, подаваемому с блока 4 управления, на блок разрешения передачи сигнала 13 цифровая информация о количестве допущенных обучаемым перегрузок, превысивших установленный на компараторе предел с сумматора 12, а также времени выполнения упражнения с счетчика времени блока 4 управления поступает в блок 14 деления, откуда количественная информация о полноте реализации скоростных возможностей машины по плавности хода, как количество случаев допустимых перегрузок проходит в блок 15 сравнения. Исходная информация, заложенная в задатчике 16, сравнивается с текущей и в виде соотношения текущего значения оценочных показателей качества вождения к исходному выдается на индикатор оценки 17, а затем на блок 4 управления. В результате этого инструктор делает вывод о достигнутом обучаемым навыке реализации скоростных возможностей машины по плавности хода, о чем он выдает соответствующие рекомендации.
Предложенное устройство для оценки плавности хода спроектировано и изготовлен опытный образец, который позволил провести сравнительные испытания эффективности обучения на машине, оборудованной известным прибором АМ-10Т, и на машине с предлагаемым устройством.
Сравнительная оценка обученности водителей на машинах с известным устройством и на машинах, оборудованных предлагаемым устройством показала, что
водители, обученные на машине с устройством для оценки плавности хода, обеспечивали среднюю скорость движения на 15% выше при прочих равных условиях;
количество жестких ударов, сопровождающихся перегрузками свыше 3g, во время движения на препятствиях сократилось в среднем в 3 раза;
в полтора, два раза сократилось время на формирование у обучаемых навыка в ощущении ими величин вертикальных перегрузок при движении по трассам с переменными высотами неровностей;
при выполнении упражнений устройство полностью исключает субъективность в определении оценки, а также позволяет установить конкретные ошибки в технике вождения машины;
используемые в электронной схеме устройства микросхемы обладают достаточной помехозащищенностью и повышают надежность его работы, а следовательно, и качество обучения вождению.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОБУЧЕНИЯ ВОДИТЕЛЕЙ ГУСЕНИЧНЫХ МАШИН | 1997 |
|
RU2113016C1 |
| БОРТОВОЙ ТРЕНАЖЕР ВОЖДЕНИЯ ГУСЕНИЧНОЙ МАШИНЫ | 2010 |
|
RU2433483C1 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ МЕХАНИКА-ВОДИТЕЛЯ ГУСЕНИЧНОЙ МАШИНЫ | 2016 |
|
RU2661176C2 |
| УСТРОЙСТВО ДЛЯ ОБУЧЕНИЯ ВОДИТЕЛЕЙ ГУСЕНИЧНЫХ МАШИН | 2006 |
|
RU2319216C1 |
| Тренажер обучения вождению гусеничной машины | 2019 |
|
RU2723504C1 |
| Тренажер для обучения вождению гусеничной машины | 2020 |
|
RU2750122C1 |
| Тренажер обучения вождению гусеничной машины | 2021 |
|
RU2765663C1 |
| УСТРОЙСТВО ДЛЯ ОБУЧЕНИЯ ВОЖДЕНИЮ ВОЕННОЙ ГУСЕНИЧНОЙ МАШИНЫ | 2005 |
|
RU2303294C2 |
| УСТРОЙСТВО ДЛЯ ОБУЧЕНИЯ МЕХАНИКА-ВОДИТЕЛЯ БРОНИРОВАННОЙ ГУСЕНИЧНОЙ МАШИНЫ | 2005 |
|
RU2285958C1 |
| УСТРОЙСТВО ДЛЯ ОЦЕНКИ МАСТЕРСТВА ВОЖДЕНИЯ ОПЕРАТОРА БРОНИРОВАННОЙ ГУСЕНИЧНОЙ МАШИНЫ | 1997 |
|
RU2123724C1 |
Сущность изобретения: устройство содержит датчик регистрации вертикальных ускорений. При превышении предельной величины ударной перегрузки на светодиодном индикаторе, расположенном в смотровом приборе водителя , появляется сигнал. Одновременно эта информация через счетчик предельных отклонений, сумматор и блок деления поступает на индикатор оценки, что позволяет водителю гусеничной машины не отвлекаться от процесса обучения и повышает его эффективность. 2 ил.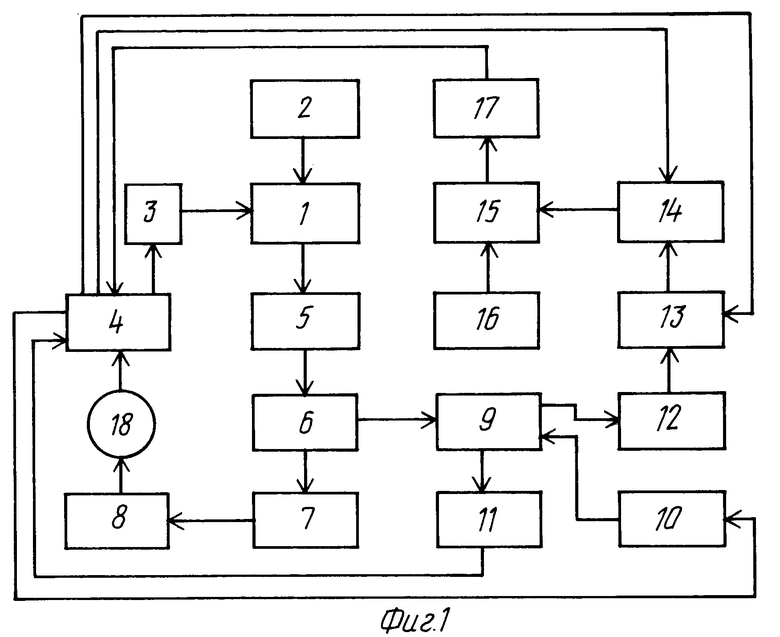
Устройство для оценки плавности хода гусеничных машин при обучении вождению, содержащее блок датчиков регистрации вертикальных ускорений, счетчики и индикаторы, отличающееся тем, что в него дополнительно введены последовательно соединенные блок управления выполнением управления, схема установки уровня ударной перегрузки, компаратор фиксации превышения уровня ударной перегрузки, второй вход которого соединен с выходом блока датчиков регистрации вертикального ускорения, усилитель, одновибратор, эмиттерный повторитель и схема световой индикации, размещенная в смотровом приборе водителя, последовательно соединенные задатчик оценочных показателей качества управления, блок вычитания и индикатор оценки, выход которого соединен с первым входом блока управления выполнением управления, последовательно соединенные счетчик превышения предельных ускорений, второй вход которого соединен с вторым выходом одновибратора и цифровой индикатор, выход которого соединен с вторым входом блока управления выполнением управления, блок формирования сигнала на автоматический сброс индикации, выход которого соединен с вторым входом счетчика превышения предельного ускорения, а вход соединен с вторым выходом блока управления выполнением упражнения, последовательно соединенные сумматор, вход которого соединен с выходом счетчика превышения предельного ускорения, блок разрешения передачи сигнала, управляющий вход которого соединен с третьим выходом блока управления выполнением упражнения, и блок деления, второй вход которого соединен с четвертым выходом блока выполнения упражнения, а выход соединен с вторым входом блока вычитания.
