Изобретение относится к учебно-тренировочным средствам и может быть использовано в тренажерах для обучения механиков-водителей гусеничных бронированных машин.
Наиболее близким техническим решением к предлагаемому является известное устройство для моделирования прямолинейного движения гусеничных машин в тренажерах, содержащее блок задания визуальной обстановки, выходы которого соединены с блоком имитации дорожной обстановки, соединенный с пультом инструктора, связанным с блоком информации, соединенный с датчиками состояния органов управления, которые подключены к входу блока динамики движения (см. Изделие ТТВ-1/172. Технический паспорт и описание).
Недостатком данного устройства является невозможность осуществлять объективную в количественной форме оценку качества выполнения задания по управлению гусеничной машиной при имитации вождения на тренажере. К тому же, оценка правильности действий обучаемого инструктором является субъективной, так как зависит от личного опыта инструктора и его интуиции.
Такое положение привело к недостаточному качеству подготовки обучаемых, которое проявляется в том, что большинство обучаемых в период подготовки приобретают навык вождения, не достаточный для уверенного самостоятельного управления бронированной гусеничной машиной.
Задачей предлагаемого технического решения является повышение эффективности качества обучения путем повышения точности оценки качества вождения.
Поставленная задача решается путем введения в известное устройство тренажера типа ТТВ-172 блока объективной оценки, состоящего из блока областей успешных управлений, блока оценки качества выполнения группы циклов с задатчиком порога его срабатывания, блоков формирования сигнала остановки цикла и формирования сигнала подсказки, выходы которых являются выходами блока объективной оценки и соединены с соответствующими входами блока информации, а входы - с выходами блока оценки качества выполнения группы циклов, соединенного входами с выходом блока оценки качества выполнения цикла, входы которого подключены к выходам блока областей успешных управлений, входы которого являются входами блока объективной оценки и соединены с выходами блока динамики движения.
На чертеже изображена функциональная схема устройства.
Устройство содержит блок 1 задания визуальной обстановки, выходы которого соединены с блоком 2 имитации дорожной обстановки, а входы подключены к пульту 3 инструктора. Пульт 3 инструктора связан также с блоком 4 информации, представляющим собой приборную панель с микроамперметрами и цветовыми ламповыми индикаторами.
Датчики 6 положения органов 5 управления подключены к входам блока 7 динамики движения, выполненного в виде набора операционных усилителей, решающих дифференциальные уравнения динамики движения гусеничной машины заданного типа (модели), связанным с блоком 8 объективной оценки.
Блок 8 объективной оценки содержит блок 9 областей успешных управлений, к входам которого подключен блок 7 динамики движения, а выходы соединены с блоком 10 оценки качества выполнения цикла, к входу которого подведены стандартные для аналоговых схем напряжения (в данном случае + 100 В и - 100 В) из блока 11 питания, который связан также с блоком оценки качества выполнения группы циклов, входы которого соединены с задатчиком 13 порога срабатывания блока 12, выполненным на генераторе импульсов, который подключен к пульту 3 инструктора.
Выходы блока 10 оценки качества выполнения цикла подключены к блоку 12 оценки качества выполнения группы циклов, выходы которого связаны с входами блока 14 формирования сигнала остановки цикла и блока 15 формирования сигнала подсказки, и оба они связаны с блоком 4 информации.
Блок 7 динамики движения содержит набор операционных усилителей, в совокупности позволяющих получить решение системы дифференциальных уравнений, описывающих динамику движения гусеничной машины. Блок содержит операционный усилитель с конденсатором.
Блок 9 областей успешных управлений содержит две группы операционных усилителей.
Блоки 10 и 12 содержат две решающие цепи.
Блок 14 формирования сигнала остановки цикла выполнен на операционных усилителях.
Блок 15 формирования сигнала подсказки содержит две решающие цепи, каждая из которых представляет собой последовательную цепочку операционных усилителей, в цепях обратной связи которых помещены диодные ограничители.
Устройство работает следующим образом.
Обучаемый, наблюдая за изменением дорожной обстановки с помощью блока 4 информации, задаваемой инструктором с помощью пульта 3 инструктора и блока 2 имитации дорожной обстановки, манипулирует органами 5 управления, связанными с датчиками 6, представляющими собой потенциометрические и релейные датчики, электрические сигналы с которых поступают на входы блока 7 динамики движения, который осуществляет моделирование изменений параметров гусеничной машины по соответствующим каналам (каналу скорости и каналу разворота), сигнал с этого блока подается на вход операционного усилителя блока 9 областей успешных управлений.
Установки в этом блоке выбираются из условий, при которых нарушение граничных значений функции приводит к аварийной ситуации.
Таким образом, если функции скорости и угла разворота находятся в пределах областей успешных управлений, ограниченных диодными схемами соответствующих усилителей, на выходах усилителей будут сигналы, соответствующие единице. Нарушение любой области приводит к появлению «0» на выходе соответствующего усилителя. Сигал «1» означает, что обучающийся не совершает ошибок. Сигнал «0» означает ошибку обучающегося.
Дискретные сигналы «0» и «1» поступают на выходы блока 10 оценки качества цикла.
Сигналы, соответствующие непрерывным функциям оценки качества выполнения цикла по координате угла поворота и скорости движения гусеничной машины при имитации движения на тренажере, подаются на соответствующие входы блока 12 оценки качества выполнения группы циклов. Так как выполнение одного цикла еще не предопределяет качество обучения (профессиональной подготовленности) механика-водителя и возникает необходимость оценивать качество выполнения группы циклов для достижения и определения устойчивости навыка, то заранее устанавливается инструктором через пульт 3 инструктора число циклов в группе. Соответствующая установка группы производится задатчиком 13 путем ввода ограничений на общее число импульсов и на период импульса. В этом блоке запоминаются уровни качества всех циклов принятой группы, суммарный уровень заранее регулируется установкой. После наступления конечного момента последнего цикла группы накопленное напряжение усредняется, а на выходе получается усредненная функция качества выполнения установленной группы циклов обучения. Эта непрерывная функция представляет собой экспоненту, являющуюся кривой обучения. Установку задатчика 13 можно изменять. Функция успешности выполнения группы циклов может формироваться по частям в течение выполнения всей этой группы циклов. Все виды установки задатчика 13 равнозначно точны, и их применение зависит от решения, принимаемого инструктором (например, при возможности наблюдений за кривой обучения лишь в конце выполнения группы циклов принимается первый способ генерирования управляющих импульсов).
При отсутствии ошибок обучающихся обе функции в конце группы циклов достигают уровня «1». При наличии ошибок по каждому из каналов управления обе кривые обучения в конце группы циклов достигнут уровней, отличающихся от «1» и располагающихся между 0 и 1. Тем самым достигается более тонкая оценка качества выполнения группы циклов, чем оценка, при которой ошибочно выполненные циклы исключаются из общего анализа.
Блок 14 формирования сигналов остановки цикла получает на свои входы функцию успешности выполнения группы циклов по разворотам, функцию успешности выполнения группы циклов по скорости. В этом блоке осуществляется пороговое сравнение функции с заранее заданными ее граничными значениями на основании рекомендованных инструктором и полученных с пульта 3 инструктора установок относительно требований к самому процессу обучения (например, ограничения на минимальный уровень качества выполнения группы циклов, который должен быть достигнут к заданному циклу). Если достигнутый уровень качества выполнения группы циклов к заданному циклу не выходит за пределы заранее установленного «коридора», то на выходе этого блока сигнал отсутствует и на вход блока 4 информации не подается никаких предупреждающих сигналов. Если с выхода блока 14 поступает сигнал на вход блока 4 информации, то подается предупреждающий сигнал о необходимости повысить интенсивность обучения.
Аналогично вырабатывается сигнал, предупреждающий о нарушении процедуры обучения по управлению скоростью движения гусеничной машины. Тем самым достигается индивидуализация предупреждающих сигналов по каналам управления, что способствует выработке правильных решений относительно путей повышения интенсификации процесса обучения вождению.
Блок 15 формирования сигнала подсказки функционирует синхронно с остальными блоками и вырабатывает электрические сигналы, позволяющие подсказывать обучающемуся через блок 4 информации, на каком цикле обучения ему необходимо интенсифицировать действия по управлению, на каком цикле им совершены ошибки управления при имитации движения гусеничной машины. Для этого сигналы с соответствующих выходов блока 12 оценки качества группы циклов подаются на входы соответственно первой и второй решающих цепей.
Число уровней качества выполнения цикла устанавливается в зависимости от числа операционных усилителей, установленных в решающей цепи.
Указанное устройство позволяет осуществить объективную в количественной форме оценку качества выполнения механиком-водителем упражнения по вождению бронированной гусеничной машины при имитации движения на тренажере. При этом учитываются особенности адаптации обучающегося тем, что в оценке участвуют и те циклы, которые завершаются неуспешно, т.е. выполняются с ошибками, так как механик-водитель и в таких процедурах получает определенную информацию о системе «водитель - машина» и тем самым навык вождения. Так как наличие навыка характеризуется достижением стабильных уровней качества исполнения, то в устройстве предусмотрена оценка уровней качества при достижении стабильности в процессе ее достижения. Таким образом, в итоге получается кривая обучения, в полной мере характеризующая степень обученности механика-водителя.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для обучения водителей наземных транспортных средств | 1983 |
|
SU1170485A1 |
| Тренажер обучения вождению гусеничной машины | 2021 |
|
RU2765663C1 |
| КОМПЬЮТЕРНЫЙ ТРЕНАЖЕР НАЧАЛЬНОЙ ПОДГОТОВКИ МЕХАНИКА-ВОДИТЕЛЯ | 2001 |
|
RU2190256C1 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ МЕХАНИКА-ВОДИТЕЛЯ ГУСЕНИЧНОЙ МАШИНЫ | 2016 |
|
RU2661176C2 |
| Тренажер для обучения вождению гусеничной машины | 2020 |
|
RU2750122C1 |
| Тренажер обучения вождению гусеничной машины | 2019 |
|
RU2723504C1 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ МЕХАНИКА-ВОДИТЕЛЯ БРОНИРОВАННОЙ ГУСЕНИЧНОЙ МАШИНЫ | 1999 |
|
RU2155991C1 |
| Тренажер профессиональной подготовки оператора гусеничной машины | 2022 |
|
RU2798765C1 |
| ТРЕНАЖЕР ДЛЯ ПОДГОТОВКИ МЕХАНИКОВ-ВОДИТЕЛЕЙ ПОДВИЖНЫХ КОМПЛЕКСОВ ВООРУЖЕНИЯ | 2019 |
|
RU2711047C1 |
| ТРЕНАЖЕР ВОЖДЕНИЯ | 1998 |
|
RU2150753C1 |
Изобретение относится к учебно-тренировочным средствам и может быть использовано в тренажерах для обучения механиков-водителей гусеничных бронированных машин. Технический результат - повышение эффективности качества обучения путем повышения точности оценки качества вождения. Поставленная задача решается путем введения блока объективной оценки, состоящего из блока областей успешных управлений, блока оценки качества выполнения группы циклов с задатчиком порога его срабатывания, блоков формирования сигнала остановки цикла и формирования сигнала подсказки, выходы которых являются выходами блока объективной оценки и соединены с соответствующими входами блока информации. При обучении учитываются особенности адаптации обучающегося тем, что в оценке участвуют и те циклы, которые завершаются неуспешно, т.е. выполняются с ошибками, так как механик-водитель и в таких процедурах получает определенную информацию о системе водитель-машина и тем самым навык вождения. Так как наличие навыка характеризуется достижением стабильных уровней качества исполнения, то в устройстве предусмотрена оценка уровней качества при достижении стабильности в процессе ее достижения. Таким образом, в итоге получается кривая обучения, в полной мере характеризующая степень обученности механика-водителя. 1 ил.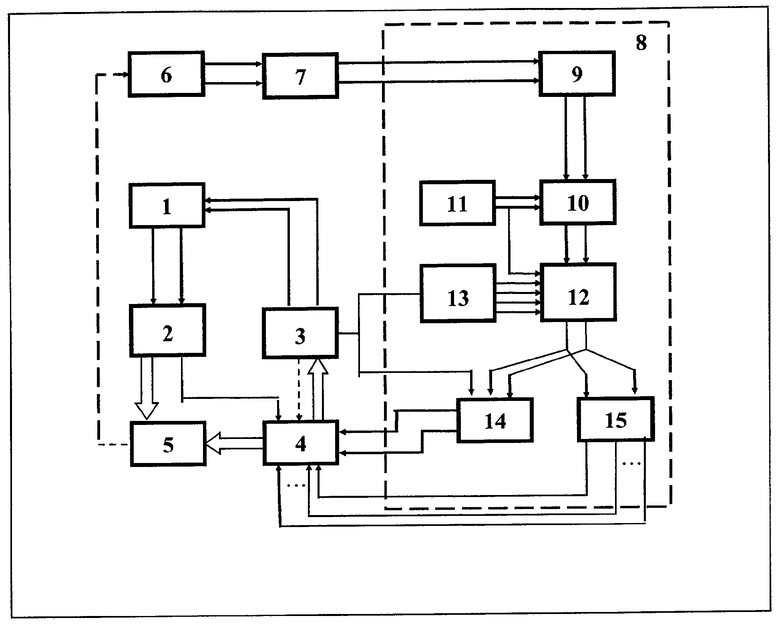
Устройство для обучения механика-водителя бронированной гусеничной машины, содержащее органы управления, блок задания визуальной обстановки, выходы которого соединены с блоком имитации дорожной обстановки, а входы - с пультом инструктора, при этом пульт инструктора соединен с блоком информации, органы управления соединены с датчиками положения, которые подключены к входу блока динамики движения, при этом оно снабжено блоком объективной оценки, состоящим из блока областей успешных управлений, блока оценки качества выполнения группы циклов с задатчиком порога его срабатывания, блоков формирования сигнала остановки цикла и формирования сигнала подсказки, выходы которых являются выходами блока объективной оценки и соединены с соответствующими входами блока информации, а входы - с выходами блока оценки качества выполнения группы циклов, соединенного входами с выходом блока оценки качества выполнения цикла, входы которого подключены к выходам блока областей успешных управлений, входы которого являются входами блока объективной оценки и соединены с выходами блока динамики движения.
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
| - М.: Воениздат, 1977, с.10-12, 33-35 | |||
| УНИФИЦИРОВАННЫЙ КИНОТРЕНАЖЕР МЕХАНИКА-ВОДИТЕЛЯ ТАНКА | 2001 |
|
RU2189081C1 |
| ТРЕНАЖЕР МЕХАНИКА-ВОДИТЕЛЯ ТАНКА | 1990 |
|
RU2009544C1 |
| УСТРОЙСТВО ДЛЯ ОБУЧЕНИЯ ВОДИТЕЛЕЙ ГУСЕНИЧНЫХ МАШИН | 1997 |
|
RU2113016C1 |
| УЛУЧШЕНИЕ КАЧЕСТВА ВИДЕО | 2015 |
|
RU2658642C1 |
| DE 3032250 A1, 01.04.1982. | |||

