Изобретение относится к устройствам для обучения водителей гусеничных машин.
Качество выполнения упражнений по вождению гусеничных машин водителями оценивается по средней скорости движения и числу ошибок, допущенных обучаемым при преодолении различных препятствий и ограниченных проходов. Научить за непродолжительный срок правильно преодолевать препятствия, предусмотренные условиями выполнения упражнений, нелегко. Для этого, чтобы правильно двигаться по ним, водитель должен хорошо владеть органами управления движения машины, уметь правильно ориентироваться и обладать хорошим глазомером.
В обычных условиях обучение ориентированию осуществляется следующим образом. Водитель в кабине размещен по центральной оси гусеничной машины. Поэтому для ориентирования из машины с места водителя необходимо мысленно провести линию визирования от глаз, через риску на стекле смотрового прибора и совместить ее с осевой линией препятствия или следом, впереди прошедшей машины.
Однако практика показывает, что многие водители, прошедшие индивидуальную подготовку по такой методике, слабо представляют эту мнимую линию, в результате после полугодового обучения не владеют навыками в быстрой ориентировке и в точных действиях при управлении движением машиной на высоких скоростях.
С целью исправления дефектов в технике вождения необходимо тренировать водителей на специальных тренажерах, которых к сожалению нет.
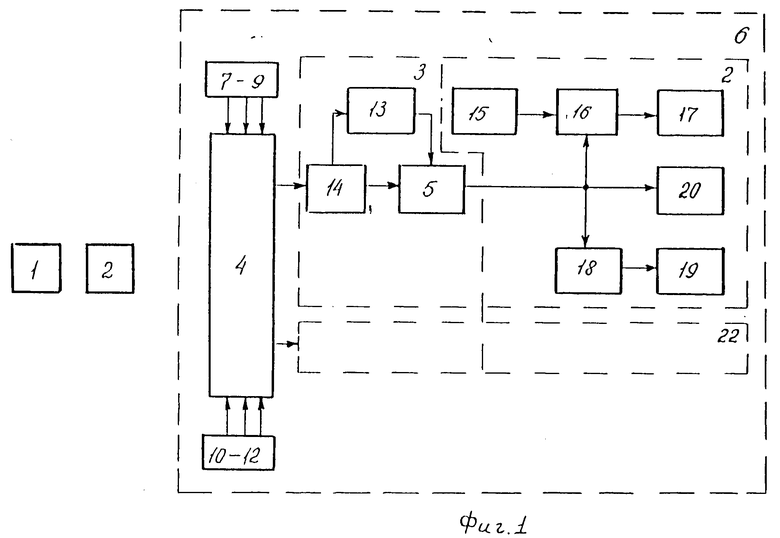
Известно устройство оперативного контроля, описанное в книге Шахраева В. П. и Дмитриева В.В. Технические средства обучения и контроля качества вождения машин на автодромах. - М.: Воениздат, 1988, с. 42 - 56, а также Дмитриев В. В. Тренажер водителя транспортного средства - а.с. N 1211796, 1986 в ж. Открытия и изобретения, 1996, N 6, с. 251, которое предъявляет обучаемому во время выполнения упражнения следующую информацию: количество выездов машины за пределы обозначенного маршрута; моменты времени и направления выездов; моменты проезда машиной заданных участков маршрута. Структурная схема устройства показана на фиг. 1.
Устройство содержит: датчики 1 - 2 положения, блок 2 регистрации местонахождения транспортного средства 3; переключатель чувствительности 4; переключатель 5 режимов работы и блок 6 индикации. Датчики 1 - 2 положения, в состав которых входит набор неподвижных магнитных элементов (неподвижный датчик), размещаются на поверхности дорожного покрытия, и размещаясь в определенных точках маршрута, обозначают заданную траекторию движения машины.
Блок 3 регистрации содержит магнитоуправляемые элементы 7 - 12 (подвижный датчик), триггеры 13 и формирователь импульсов 14.
В состав блока 6 индикации входит задающий генератор 15, схема совпадения 16, блок 17 звуковой сигнализации, счетчики 18, элементы 19 цифровой индикации и элементы 20 световой индикации.
Конструктивно блок индикации выполнен в виде двух одинаковых корпусов 21 - 22, размещенных справа и слева от водителя.
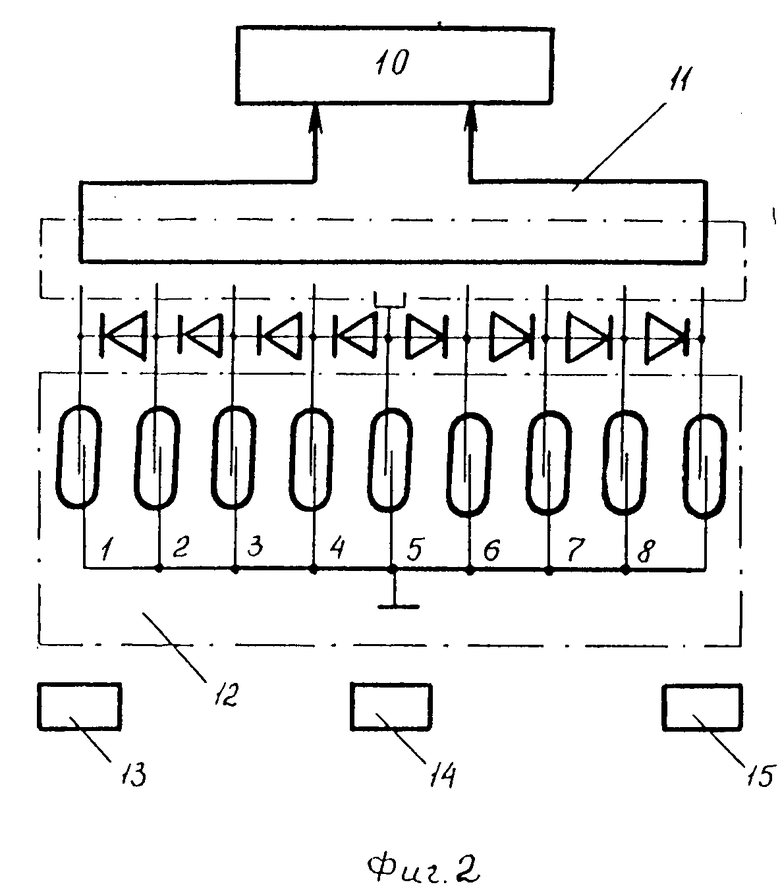
Электрическая схема соединения магнитоуправляемых элементов блока регистрации (фиг. 2) содержит: 1 - 9 - магнитоуправляемые элементы (герконы), 10 - блок индикации, 11 - переключатель чувствительности, 12 - планка, 13 - 15 - неподвижные датчики (магниты).
Устройство может работать в двух режимах.
В режиме "Оценка" устройство фиксирует количество выездов машины за пределы обозначенного маршрута, информирует водителя о моментах совершения ошибок и указывает ему направление выезда. Элементы датчиков касания и датчика положения в этом режиме объединены в две группы, выходы которых подключены к двум входам блока индикации. В момент выезда машины за пределы обозначенного маршрута включаются соответствующие направлению выезда световой индикатор и звуковой сигнализатор, а на цифровом индикаторе (левом или правом) фиксируется ошибка.
В режиме "Контроль" устройство информирует обучаемого о проезде машиной контрольной точки или участка маршрута. Элементы датчика в этом режиме электрически соединены параллельно и их общий выход подключен к двум входам блока индикации. В момент проезда машины через контрольную точку маршрута включаются звуковые сигнализаторы и световые индикаторы местоположения машины, а цифровые индикаторы фиксируют номер пройденной контрольной точки.
Вместе с тем, при обучении на тренажерах с таким устройством, желаемая эффективность обучения не велика, а формируемый навык в точности ориентирования движения машины приобретается медленно. Этот недостаток проявляется в снижении скорости и увеличении числа ошибок по технике вождения.
Причинами указанных недостатков является несовершенство устройства обучения, которое сводится к следующему:
устройство информирует водителя только о фактах уже совершенных ошибок, а не указывает ему на начальные моменты и величины отклонения от заданной траектории движения. Это не дает водителю возможность самостоятельно, без помощи инструктора, отрабатывать отдельные элементы вождения;
световые индикаторы размещаются в кабине машины перед водителем значительно шире основного сектора поля зрения, справа и слева от него, что нарушает меры безопасности, так как водитель вынужден периодически переключать внимание от наблюдения за трассой на показания индикаторов;
большое количество датчиков назначения, устанавливаемых на машине и на участках, а также их низкая надежность и незначительный срок службы, обусловленные неудачным расположением, зависимостью показаний от погодных условий и сложностью регулировки;
это не позволяет автоматизировать обучение и контроль качества вождения в снежную, дождливую погоду.
Целью изобретения является повышение качества обучения вождению путем расширения функциональных возможностей устройства и повышения надежности его работы.
Для достижения этой цели разработано устройство, которое отличается от существующих простотой конструкции, высокой надежностью, может использоваться для различных типов машин, позволяет автоматизировать контроль качества вождения машин на любых участках маршрута, позволяет обучаемому самостоятельно контролировать правильность своих действий.
Эта цель достигается применением бесконтактного датчика места положения машины на препятствии и расположением элементов световой индикации величины отклонения от заданной траектории движения в поле зрения смотрового прибора водителя.
На фиг. 3 изображена структурная схема предлагаемого устройства, которая содержит: датчик 1 положения, получающий сигналы от генератора 2 низкой частоты и связанный с магниточувствительными элементами датчиков 3 и 4. Выходы магниточувствительных датчиков 3 и 4 через электронные микросхемы усилителя сигналов 5 и 6 соединены с фазовым детектором 7, выход которого подключен к блоку компараторов 8. Последний соединен через схему 9 установки уровней отклонений с выходом от блока 10 управления и переключателем 11 режимов работы, подключенного своими выходами к выходам схем светодиодных индикаторов 12, 13, 18, 19, счетчика импульсов 24 числа предельных отклонений и цифрового индикатора 26. При этом схемы 12 и 13 содержат генераторы мигания 14 и 15 на мультивибраторах, своими входами соединенные с первой парой выходов переключателя режимов работы, а выходами - с первыми входами усилителей электрического сигнала 16 и 17, вторые входы которых соединены с другой парой выходов переключателя, а выходы - с входами светодиодных индикаторов 12 и 13 малого и среднего отклонения соответственно. Входы схем 18 и 19 индикации предельного отклонения через усилители 20 и 21 соединены с третьей парой выходов переключателя и входами схемы ИЛИ 22, выход которой соединен через одновибратор 23 с первым входом счетчика 24 импульсов числа предельных ускорений, второй вход которого подключен к третьему выходу блока управления, соединенного входом через цифровой индикатор с выходом блока 25 формирования оценок, входы которого подключены соответственно к выходам задатчика 27 оценочных показателей, счетчика импульсов числа предельных отклонений и блока управления.
Обучение осуществляется следующим образом.
Перед началом выполнения упражнения оператор включает генератор 2 низкой частоты, слабый переменный ток которого, проходя по проводнику датчика 1, образует вокруг него переменное магнитное поле. При этом инструктор устанавливает в задатчике 27 оценочных показателей значения скорости движения, соответствующее нормативному. С началом движения в блоке 10 управления начинается отсчет времени выезда машины на контролируемый участок трассы - элементы датчиков 3 и 4, пересекая магнитное поле, будут вырабатывать электрические сигналы, пропорциональные отклонению машины от середины линии проезда. При правильном управлении машиной, т.е. при движении ее по заданной траектории эти сигналы, усиленные электронными микросхемами 5 и 6, поступают на фазовый детектор 7. Сравнивая сигналы двух датчиков, фазовый детектор определяет величину и направление отклонения машины от средней линии проезда. Сигнал постоянного тока от фазового детектора подается в блок компараторов.
При правильном управлении машиной магниточувствительные элементы датчика расположены симметрично относительно средней линии прохода, и на выходе фазового детектора сигнал отсутствует.
В случае отклонения танка от заданной траектории движения на выходе фазового детектора появится сигнал рассогласования постоянного тока, который проходит в блок 8 компараторов на операционных усилителях. Блок компараторов определяет три уровня отклонений: малое, среднее и предельное. Величины уровней индикации отклонений задаются и обеспечиваются внутренними регуляторами блока управления через схему 9, которая подключена своим входом к блоку компараторов. При наличии на другом входе в компараторе сигнала рассогласования, соответствующего величине отклонения от средней линии заданного направления движения, они подаются на схемы светодиодных индикаторов, расположенных в поле зрения смотрового прибора водителя. Сигнал малого отклонения, усиливаясь в усилителе электромикросхемой 16 и 17, индицируется обучаемому мигающим светом за счет генераторов питания 14 и 15 соответствующего светодиодного индикатора (13 или 12). Это позволяет обучаемому с начала движения правильно оценивать свое ощущение по величине отклонения. Сигнал среднего отклонения с выхода блока компараторов через переключатель 11 поступит на электромикросхему усилителя 16 или 17 и вызовет постоянное свечение светодиодных индикаторов 12 или 13 в зависимости от стороны отклонения от заданного направления движения. При этом водитель не переключает внимания от наблюдения за направлением движения показания светодиодных индикаторов и может самостоятельно контролировать правильность своих действий, а также отрабатывать приемы вождения в ограниченных проходах.
В случае большого отклонения от середины линии ограниченного прохода сигнал через переключатель поступит на усилитель 20 или 21 и просигнализирует обучаемому о допущенной ошибке постоянным свечением индикатора 18 или 19. Одновременно, от блока 8 сигнал поступит на счетчик 24 импульсов через схему 22 ИЛИ и одновибратор 23, который "запомнит" этот сигнал. Индикация отклонений машины от заданного направления и съезда за пределы обозначенных габаритов, а также регистрация ошибок по технике вождения, вправо или влево аналогичны и без особенностей.
Сигнал окончания отработки управления, поступающий от блока 10 управления на счетчик 24 импульса числа предельных отклонений, а также информация о количестве допущенных ошибок по технике вождения и времени выполнения упражнения проходят в блок 25 формирования оценок. Исходная информация, заложенная в задатчике 27 оценочных показателей, сравнивается с текущей и в виде общей оценки средней скорости движения с учетом количества ошибок, допущенных при преодолении препятствий, выдается на индикатор 26 оценок, а затем на блок 10 управления. В результате инструктор делает вывод о достигнутом уровне мастерства вождения и возможности перехода к более сложной задаче.
Режим "контроль". При выполнении зачетных упражнений, сдаче экзаменов или использовании устройства для контроля по вождению машины при определении классной квалификации переключателем режимов работы световая сигнализация отключается, а цифровой индикатор включается после выполнения заданного упражнения, информируя водителя о качестве вождения.
В этом режиме сигнал ошибки, выделенный блоком компараторов, подается на вход счетчика 24 импульсов числа предельных отклонений через выходы переключателя 11, соответствующие данному режиму работы.
Устройство исключает субъективность в оценке мастерства вождения, а также позволяет установить конкретные ошибки в вождении машины. Нулевые показания цифрового индикатора фиксируют случаи обхода препятствия на маршруте движения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОЦЕНКИ ПЛАВНОСТИ ХОДА ГУСЕНИЧНЫХ МАШИН ПРИ ОБУЧЕНИИ ВОЖДЕНИЮ | 1997 |
|
RU2113015C1 |
| БОРТОВОЙ ТРЕНАЖЕР ВОЖДЕНИЯ ГУСЕНИЧНОЙ МАШИНЫ | 2010 |
|
RU2433483C1 |
| УСТРОЙСТВО ДЛЯ ОБУЧЕНИЯ ВОДИТЕЛЕЙ ГУСЕНИЧНЫХ МАШИН | 2006 |
|
RU2319216C1 |
| Тренажер обучения вождению гусеничной машины | 2019 |
|
RU2723504C1 |
| Тренажер обучения вождению гусеничной машины | 2021 |
|
RU2765663C1 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ МЕХАНИКА-ВОДИТЕЛЯ ГУСЕНИЧНОЙ МАШИНЫ | 2016 |
|
RU2661176C2 |
| УСТРОЙСТВО ДЛЯ ОБУЧЕНИЯ ВОЖДЕНИЮ ВОЕННОЙ ГУСЕНИЧНОЙ МАШИНЫ | 2005 |
|
RU2303294C2 |
| УСТРОЙСТВО ДЛЯ ОЦЕНКИ МАСТЕРСТВА ВОЖДЕНИЯ ОПЕРАТОРА БРОНИРОВАННОЙ ГУСЕНИЧНОЙ МАШИНЫ | 1997 |
|
RU2123724C1 |
| УСТРОЙСТВО ДЛЯ ОБУЧЕНИЯ МЕХАНИКА-ВОДИТЕЛЯ БРОНИРОВАННОЙ ГУСЕНИЧНОЙ МАШИНЫ | 2005 |
|
RU2285958C1 |
| УНИФИЦИРОВАННЫЙ КИНОТРЕНАЖЕР МЕХАНИКА-ВОДИТЕЛЯ ТАНКА | 2001 |
|
RU2189081C1 |
Изобретение обеспечивает индикацию отклонения машины от траектории, заданной равносигнальной зоной токонесущих проводников, расположенных вдоль трассы движения. При отклонении от средней линии индуктивный датчик воспринимает сигналы, пропорциональные отклонению, которые отображаются в смотровом приборе водителя и в блоке формирования оценок, в результате чего повышается качество обучения и надежность работы устройства. 3 ил.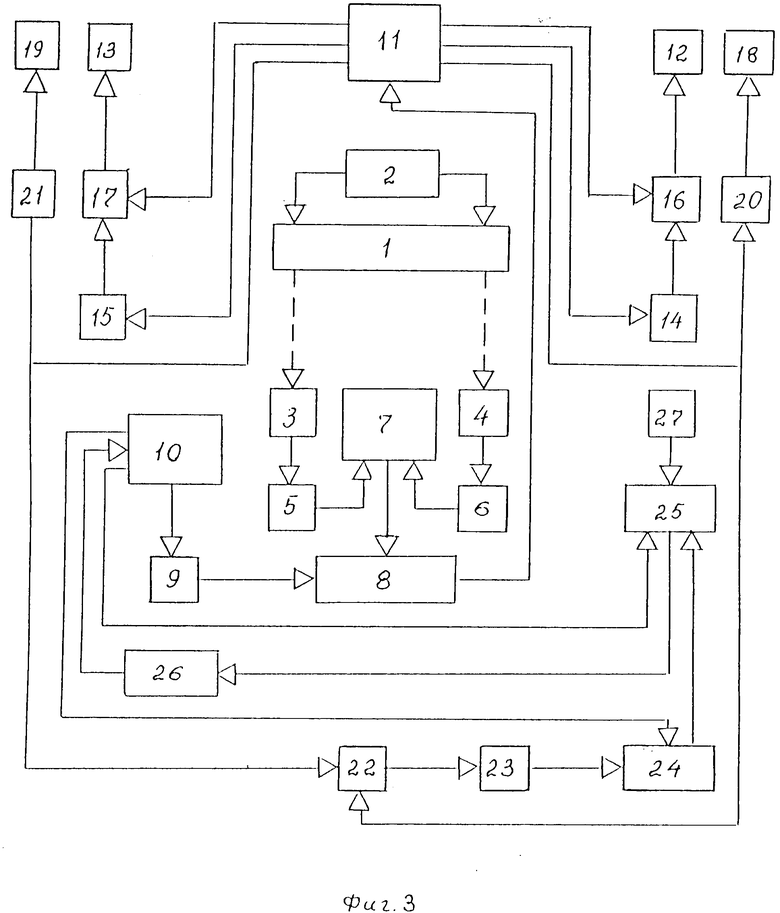
Устройство для обучения водителей гусеничных машин, содержащее датчик и блок регистрации местоположения машины, индикаторы и переключатель режимов работы со счетчиком, отличающееся тем, что оно дополнительно содержит последовательно соединенные задатчик оценочных показателей, блок формирования оценок, цифровой индикатор, блок управления выполнением упражнения, схему установки уровня отклонения, блок компараторов, переключатель режимов работы, первый генератор миганий малых отклонений, первый усилитель и первый светодиодный индикатор малого и среднего отклонения, последовательно соединенные схема ИЛИ, одновибратор и счетчик импульсов, выход которого соединен с вторым входом блока формирования оценок, третий вход которого соединен с вторым выходом блока управления выполнением упражнения, третий выход которого соединен с управляющим входом счетчика импульсов, последовательно соединенные второй генератор миганий малых отклонений, вход которого соединен с вторым выходом переключателя режимов работы, второй усилитель и второй светодиодный индикатор малого и среднего отклонения, последовательно соединенные третий усилитель и первый светодиодный индикатор предельного отклонения и четвертый усилитель и второй светодиодный индикатор предельного отклонения, причем вторые входы первого и второго усилителей соединены соответственно с третьим и четвертым выходами переключателя режимов работы, пятый и шестой выходы которого соединены соответственно с входами третьего и четвертого усилителей и первым и вторым входами схемы ИЛИ, кроме того, датчик местоположения машины выполнен в виде токонесущего проводника, который электрически соединен с генератором низкой частоты, а индукционно с первым и вторым магниточувствительным элементом, которые через пятый и шестой усилители соответственно соединены с входами фазового детектора, выход которого соединен с вторым входом блока компараторов, при этом светодиодные индикаторы расположены в поле зрения смотрового прибора водителя.
