Изобретение относится к области пьезотехники, а именно к твердотельным вибродвигателям, и предназначено для прецизионного перемещения рабочих органов устройств адаптивной оптики и нанотехнологии.
Известен вибродвигатель, в котором взаимодействие активного элемента и подвижного звена происходит в виде косого удара [1]. Вибродвигатель отличается относительной простотой исполнения. Однако вибродвигатель осуществляет однонаправленное движение подвижного звена, что значительно сужает область его применения.
Наиболее близким аналогом заявляемого вибродвигателя является вибродвигатель серии ВИБ с возбуждением связанных колебаний двух типов [2]. Вибродвигатель содержит корпус, подвижное звено, прижимное устройство и сопряженную с подвижным звеном пьезоэлектрическую пластину из поляризованной сегнетоэлектрической пьезокерамики с электродами, соединенными с формирователем управляющего напряжения - генератором электрических колебаний. Вибродвигатель осуществляет реверсивное движение подвижного звена и соединенного с ним рабочего органа.
Однако резонансная зависимость скорости известного вибродвигателя от частоты требует прецизионного регулирования частоты генератора электрических колебаний. Система стабилизации скорости вибродвигателя компенсирующая обратимые температурные изменения резонансной частоты пьезоэлектрической пластины, весьма сложна и обладает невысокой надежностью. Кроме того, надежность вибродвигателя снижается из-за необратимых изменений пьезоэлектрических характеристик поляризованной сегнетоэлектрической пьезокерамики вследствие естественного старения пьезокерамики и возможного перегрева пьезокерамики выше допустимой температуры при длительной работе вибродвигателя или при нагреве окружающей среды при монтаже, наладке и других технологических операциях. При совместной работе нескольких вибродвигателей в одной системе каждый вибродвигатель оснащается отдельным генератором электрических колебаний с системой регулирования резонансной частоты, что существенно снижает надежность работы всей системы.
Заявляемый вибродвигатель позволяет повысить надежность работы твердотельного вибродвигателя и, кроме того, осуществить совместную работу нескольких вибродвигателей от одного источника питания переменного тока.
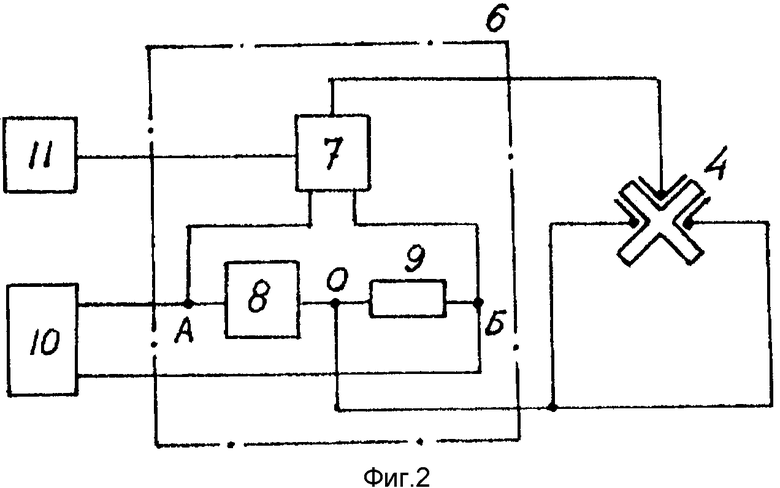
Указанный технический эффект достигается тем, что в вибродвигателе, содержащем корпус, подвижное звено, формирователь управляющего напряжения, сегнетокерамический активный элемент с электродами, закрепленный в корпусе и сопряженный с подвижным звеном посредством толкателя, и прижимное устройство, активный элемент выполнен из электрострикционной керамики в виде стержня с крестообразным поперечным сечением и обращен к подвижному звену углом, образованным двумя пластинами стержня, на плоские поверхности которых нанесены электроды, формирователь управляющего напряжения содержит переключатель, электронный ключ и резистор, при этом электронный ключ и резистор соединены последовательно и подключены к входам переключателя и к источнику питания переменного тока, выход переключателя соединен с электродами активного элемента, обращенными к подвижному звену, общая точка электронного ключа и резистора соединена с противолежащими электродами пластин активного элемента, управляющий вход переключателя подключен к входу устройства управления.
Достижение вышеуказанного технического эффекта при использовании заявляемой совокупности существенных признаков обусловлено следующим. Известны электрострикционные материалы на основе сегнетоэлектриков с размытым фазовым переходом, отличающиеся высокой электрострикционной деформацией (см. L. E. Gross et al. Ferroelectrics, 1980, v. 23, p. 187 - 192). Существенными для заявляемого устройства характеристиками являются: высокая температурная и временная стабильность электрострикционной керамики, отсутствие необходимости поляризации, практическое отсутствие старения, обусловленное отсутствием разбиения материала на домены. Отсутствие необратимых изменений электрострикционных характеристик материала в ходе эксплуатации, в том числе с неоднократным перегревом до весьма высоких температур, способствует высокой надежности работы устройства.
В то же время, из-за квадратичной зависимости электрострикционной деформации от напряженности электрического поля, для обеспечения работоспособности активного элемента необходимо достижение его высокой чувствительности путем увеличения напряженности электрического поля. Выполнение активного элемента в виде стержня с крестообразным поперечным сечением позволяет создать высокую напряженность электрического поля за счет уменьшения толщины пластины, в которой приложено управляющее напряжение. В то же время крестообразная форма поперечного сечения обеспечивает высокую механическую прочность и надежность активного элемента.
Таким образом, выбранная конструкция активного элемента обеспечивает высокую чувствительность устройства при подаче на активный элемент импульсов управляющего напряжения соответствующей формы.
Формирователь управляющего напряжения преобразует синусоидальное напряжение внешнего генератора в треугольные импульсы при помощи простой схемы с единственным электронным активным элементом - электронным ключом, например тиристором. Ключевой режим обеспечивает высокую надежность работы электронной схемы. Изменение направления движения производится также весьма просто: от цепи тиристор-резистор через переключатель на электрострикционный активный элемент передается треугольный импульс либо с передним крутым фронтом, либо с задним. Простота электронных схем заявляемого устройства существенно повышает его надежность по сравнению с прототипом.
Нерезонансный режим электрострикционного вибродвигателя позволяет подключить одновременно несколько вибродвигателей к одному источнику питания переменного тока с постоянной частотой, например, к обычной силовой сети переменного тока с частотой 50 или 400 Гц.
Таким образом, выбранное конструктивное и схематическое решение заявляемого вибродвигателя обеспечивает высокую надежность его работы и возможность совместной работы нескольких вибродвигателей от одного источника питания.
Сущность изобретения поясняется нижеследующим описанием и чертежами, где на фиг. 1 изображен общий вид вибродвигателя; на фиг. 2 - схема электрических соединений вибродвигателя; на фиг. 3 - временные диаграммы работы вибродвигателя.
Вибродвигатель (фиг. 1) содержит корпус 1, подвижное звено 2, с которым через толкатель 3 сопрягается электрострикционный активный элемент 4 в виде стержня с крестообразным поперечным сечением, имеющий электроды на поверхности пластин, образующих стержни. Активный элемент 4 выполнен из электрострикционной сегнетокерамики, например, из магнониобата-титаната свинца. Фрикционное взаимодействие элемента 4 и подвижного звена 2 обеспечивается прижимным устройством 5. Электроды активного элемента 4 электрически соединены с выходом формирователя управляющего напряжения 6.
Формирователь 6 содержит переключатель 7, электронный ключ 8 и резистор 9 (фиг. 2). Вход формирователя 6 соединен с внешним источником питания переменного тока 10, а управляющий вход переключателя 7 соединен с внешним устройством управления 11.
Внешние соединения вибродвигателя выполнены при помощи разъема 12. Подвижное звено 2 механически связано с рабочим органом 13, например, с зеркалом адаптивной оптической системы.
Вибродвигатель работает следующим образом.
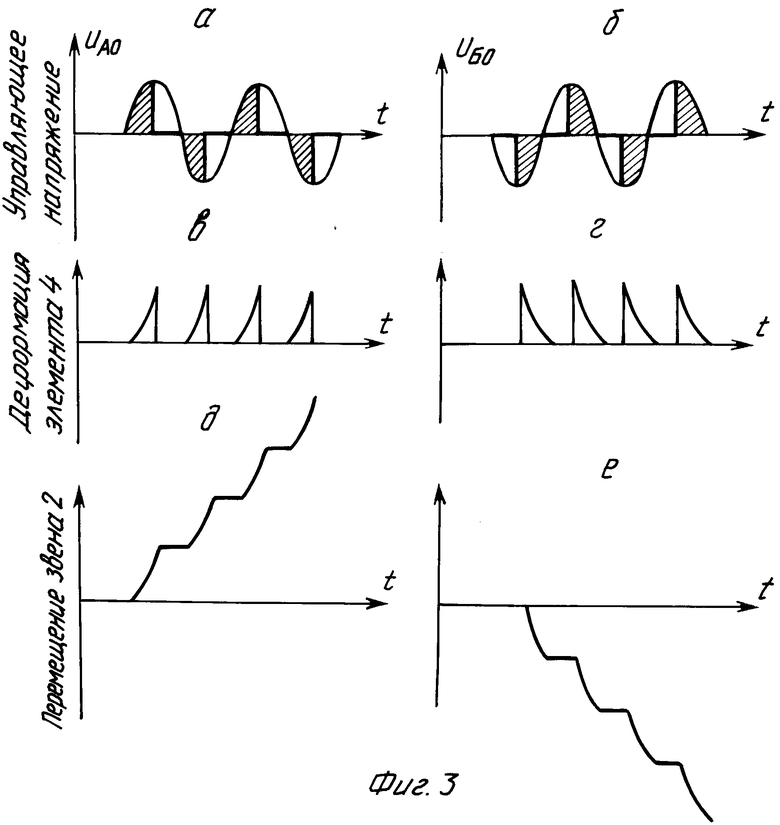
При подаче электрических колебаний синусоидальной формы от внешнего источника питания 10 на вход формирователя 6 электронный ключ 8 заперт в течение примерно четверти периода, после чего отпирается и формирует крутой фронт импульса, а именно: в точке А - задний фронт, в точке Б - передний (см. фиг. 3 а, б). В зависимости от положения переключателя 7 на электроды активного элемента 4 поступают импульсы с электронного ключа 8 или резистора 9. При увеличении управляющего напряжения активный элемент 4 испытывает деформацию двух видов - продольную и изгибную, так как управляющее напряжение подается лишь на пластины, обращенные к подвижному звену 2. При этом знак управляющего напряжения не имеет значения, так как электрострикционная деформация пропорциональна квадрату напряженности электрического поля, т.е. электрострикция - четный эффект (см. фиг. 3 в, г).
Двум фронтам импульса: крутому и пологому - соответствуют два типа фрикционного взаимодействия толкателя 3, соединенного с активным элементом 4, и подвижного звена 2, соединенного с рабочим органом 13. Во время крутого фронта импульса толкатель 3 проскальзывает вдоль звена 2, так как сила инерции массивного рабочего органа 13 превосходит силу трения между толкателем 3 и звеном 2. Во время пологого фронта импульса сила трения превосходит силу инерции, и толкатель 3 увлекает подвижное звено 2, которое перемещается в направляющих корпусах 1 на один шаг. Последовательность импульсов одного типа приводит к суммированию шагов подвижного звена 2 (см. фиг. 3 д).
Изменение направления движения звена 2 происходит при подаче управляющего сигнала от устройства управления 11 на переключатель 7. При этом изменяется тип импульсов, поступающих на электроды активного элемента 4, и происходит суммирование шагов в другом направлении (см. фиг. 3 е).
Выше описаны конструкция и работа вибродвигателя с поступательным линейным движением звена 2.
Возможен вариант вибродвигателя с вращательным движением. В этом случае подвижное звено 2 представляет собой ротор, фрикционно взаимодействующий с толкателем 3 и вращающийся на оси, закрепленной в корпусе 1. В остальном конструкция и работа вибродвигателя аналогичны первому варианту.
Выполнение сегнетокерамического активного элемента из электрострикционной керамики в виде стержня с крестообразным поперечным сечением и применение формирователя управляющего напряжения с электронным ключом существенно повышают надежность работы вибродвигателя в жестких условиях эксплуатации.
Технические преимущества вибродвигателя позволяют использовать его в адаптивных оптических системах для прецизионного перемещения активных оптических элементов, например секционированных зеркал.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ | 1995 |
|
RU2122275C1 |
| ВИБРОГИРОСКОП | 1997 |
|
RU2123219C1 |
| ИСПОЛНИТЕЛЬНОЕ УСТРОЙСТВО РАСТРОВОГО МИКРОСКОПА | 1996 |
|
RU2114493C1 |
| ТВЕРДОТЕЛЬНОЕ ИСПОЛНИТЕЛЬНОЕ УСТРОЙСТВО | 1993 |
|
RU2047199C1 |
| ФАЗОВЫЙ МОДУЛЯТОР ВОЛНОВОГО ФРОНТА | 1994 |
|
RU2080638C1 |
| ФАЗОВЫЙ МОДУЛЯТОР ВОЛНОВОГО ФРОНТА | 1995 |
|
RU2106670C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПЬЕЗОКЕРАМИЧЕСКИХ ЭЛЕМЕНТОВ | 1991 |
|
RU2029445C1 |
| ПОЛУПРОВОДНИКОВЫЙ КЕРАМИЧЕСКИЙ МАТЕРИАЛ | 1994 |
|
RU2079914C1 |
| ФАЗОВЫЙ МОДУЛЯТОР ВОЛНОВОГО ФРОНТА | 1997 |
|
RU2133052C1 |
| ВТОРИЧНЫЙ ИСТОЧНИК ПИТАНИЯ | 1992 |
|
RU2038656C1 |
Использование: изобретение относится к области пьезотехники, предназначено для прецизионного перемещения рабочих органов устройств адаптивной оптики и нанотехнологии и позволяет повысить надежность работы твердотельного вибродвигателя и осуществить совместную работу нескольких вибродвигателей от одного источника питания переменного тока. Сущность изобретения: вибродвигатель содержит корпус, подвижное звено, формирователь управляющего напряжения, закрепленный в корпусе и сопряженный с подвижным звеном посредством толкателя сегнетокерамический активный элемент из электрострикционной керамики, выполненный в виде стержня с крестообразным поперечным сечением с нанесенными на его плоские поверхности электродами, и прижимное устройство. Формирователь управляющего напряжения содержит переключатель, электронный ключ и резистор. Последние соединены последовательно и подключены к входам переключателя и к источнику питания переменного тока. Выход переключателя и общая точка электронного ключа и резистора соединены с электродами сегнетокерамического активного элемента, управляющий вход переключателя подключен к выходу устройства управления. 3 ил.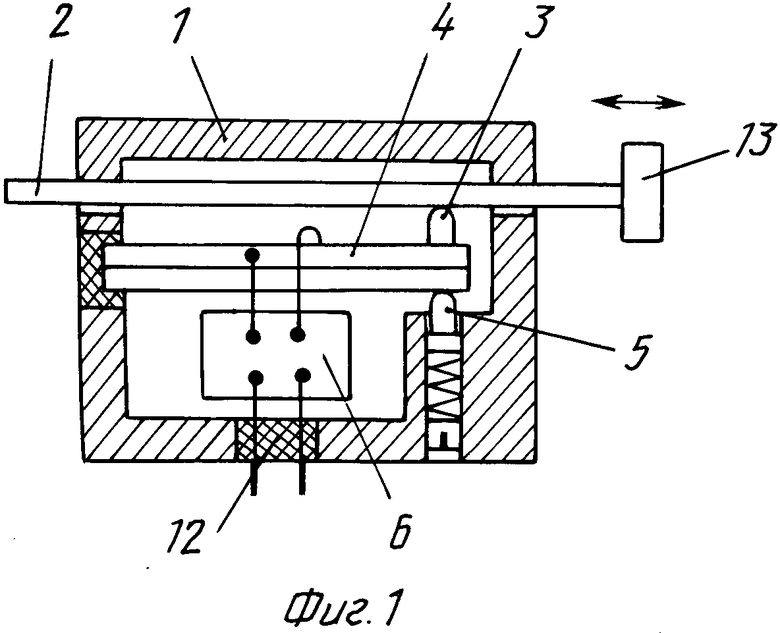
Вибродвигатель, содержащий корпус, подвижное звено, формирователь управляющего напряжения, сегнетокерамический активный элемент с электродами, закрепленный в корпусе и сопряженный с подвижным звеном посредством толкателя, прижимное устройство, отличающийся тем, что активный элемент выполнен из электрострикционной керамики в виде стержня с крестообразным поперечным сечением и обращен к подвижному звену углом, образованным двумя пластинами стержня, на плоские поверхности которых нанесены электроды, формирователь управляющего напряжения содержит переключатель, электронный ключ и резистор, электронный ключ и резистор соединены последовательно и подключены к входам переключателя и к источнику питания переменного тока, выход переключателя и общая точка электронного ключа и резистора соединены соответственно с противолежащими электродами пластин активного элемента, управляющий вход переключателя подключен к выходу устройства управления.
