Изобретение относится к области пьезотехники, а именно - к пьезоэлектрическим двигателям, и предназначено для привода различных устройств микроробототехники.
Известен пьезоэлектрический двигатель с возбуждением связанных колебаний двух типов (см. книгу Бансявичюса Р.Ю. и др. Промышленные роботы для миниатюрных изделий. - М.: Машиностроение, 1985, стр.40). Двигатель содержит корпус, ротор и фрикционно-сопряженный с ротором пьезоэлемент. Двигатель является реверсивным приводом. Однако фрикционное взаимодействие пьезоэлемента и ротора приводит к необратимым изменениям электромеханической характеристики двигателя и снижает стабильность его работы.
Наиболее близким аналогом заявляемого двигателя является пьезоэлектрический двигатель по а.с. N 775792 (СССР) от 30.10.80 г. Двигатель содержит установленные с зазором статор и ротор, пьезоэлектрический вибратор и средство взаимодействия статора с ротором в виде постоянных магнитов и пластин из ферромагнитного материала. Двигатель имеет повышенную стабильность работы.
Однако наличие в двигателе пьезоэлектрического вибратора предполагает, как и в других вибродвигателях, работу на высоких частотах и требует для управления двигателем сложных комбинированных методов амплитудно-частотной и амплитудно-фазовой модуляции, что снижает надежность устройства. Кроме того, при совместной работе нескольких вибродвигателей в одной системе каждый вибродвигатель оснащается отдельным генератором электрических колебаний с системой регулирования резонансной частоты, что снижает надежность работы всей системы. Кроме того, высокая рабочая частота двигателя сужает его функциональные возможности.
Заявляемый пьезоэлектрический двигатель позволяет повысить надежность работы, осуществить совместную работу нескольких двигателей от одного источника питания переменного тока и расширить функциональные возможности за счет работы при низких и инфранизких частотах управляющего сигнала.
Указанный технический эффект достигается тем, что в пьезоэлектрическом двигателе, содержащем статор и ротор, установленные с зазором между ними, средство взаимодействия между ними из магнитно-твердого и магнитно-мягкого материалов и пьезоэлементы, на роторе размещен постоянный магнит в виде звездочки, а на статоре размещено кольцо из магнитно-мягкого материала, установленное перпендикулярно оси двигателя с зазором относительно постоянного магнита ротора. На статоре также размещены четыре пьезоэлемента в виде стержней с крестообразным поперечным сечением.
Одним концом каждый пьезоэлемент закреплен в корпусе статора, а другим концом первый и третий, второй и четвертый пьезоэлементы попарно прикреплены к кольцу из магнитно-мягкого материала на его взаимно перпендикулярных диаметрах с возможностью осуществления попарно первым и третьим, вторым и четвертым пьезоэлементами антипараллельных изгибных деформаций в направлении, параллельном продольной оси двигателя. Первый и третий пьезоэлементы соединены электрически параллельно и подключены к источнику питания переменного тока, второй и четвертый пьезоэлементы соединены электрически параллельно и подключены к источнику питания через фазосдвигающее устройство.
Достижение вышеуказанного технического эффекта при использовании заявляемой совокупности существенных признаков обусловлено следующим.
Применение двух пар пьезоэлементов, сдвинутых в пространстве друг относительно друга на 90o и деформирующихся со сдвигом во времени, позволяет осуществить двухкоординатное волновое качание статорного кольца, служащего магнитопроводом, замыкающим магнитный поток роторного магнита. Выполнение пьезоэлемента в виде стержня с крестообразным поперечным сечением позволяет осуществлять волновое качание статорного кольца с высокой точностью, в широком интервале амплитуд, при широком диапазоне частот управляющего сигнала (см. J.A. Helfrich, S. Adenwalla, J.B. Ketterson, G.A. Zhitomirsky. Revue of Scientific Instruments, 66(10), October 1995, рр. 4880-4884). Результатом волнового качания статора является круговое перемещение минимального зазора с минимальным магнитным сопротивлением, увлекающее за собой постоянный магнит ротора. Таким образом, посредством управляемого зазора происходит электромеханическое преобразование энергии источника переменного тока во вращение ротора двигателя. При этом скорость вращения двигателя линейно зависит от частоты управляющего сигнала, что существенно упрощает управление двигателем и повышает надежность заявляемого устройства по сравнению с прототипом.
Нерезонансный режим работы пьезоэлектрического двигателя позволяет подключить одновременно несколько двигателей к одному источнику питания переменного тока, в том числе - к источнику низкочастотных колебаний, например - к обычной силовой сети с частотой 50 Гц или к генератору колебаний инфранизкой частоты.
Таким образом, выбранное конструктивное и схемотехническое решение заявляемого пьезоэлектрического двигателя обеспечивает высокую надежность его работы, возможность совместной работы нескольких двигателей от одного источника питания и расширение функциональных возможностей устройства.
Сущность изобретения поясняется нижеследующим описанием и чертежами, где на фиг.1 изображен общий вид пьезоэлектрического двигателя; на фиг.2 - схема электрических соединений пьезоэлектрического двигателя; на фиг.3 - временные диаграммы работы пьезоэлектрического двигателя.
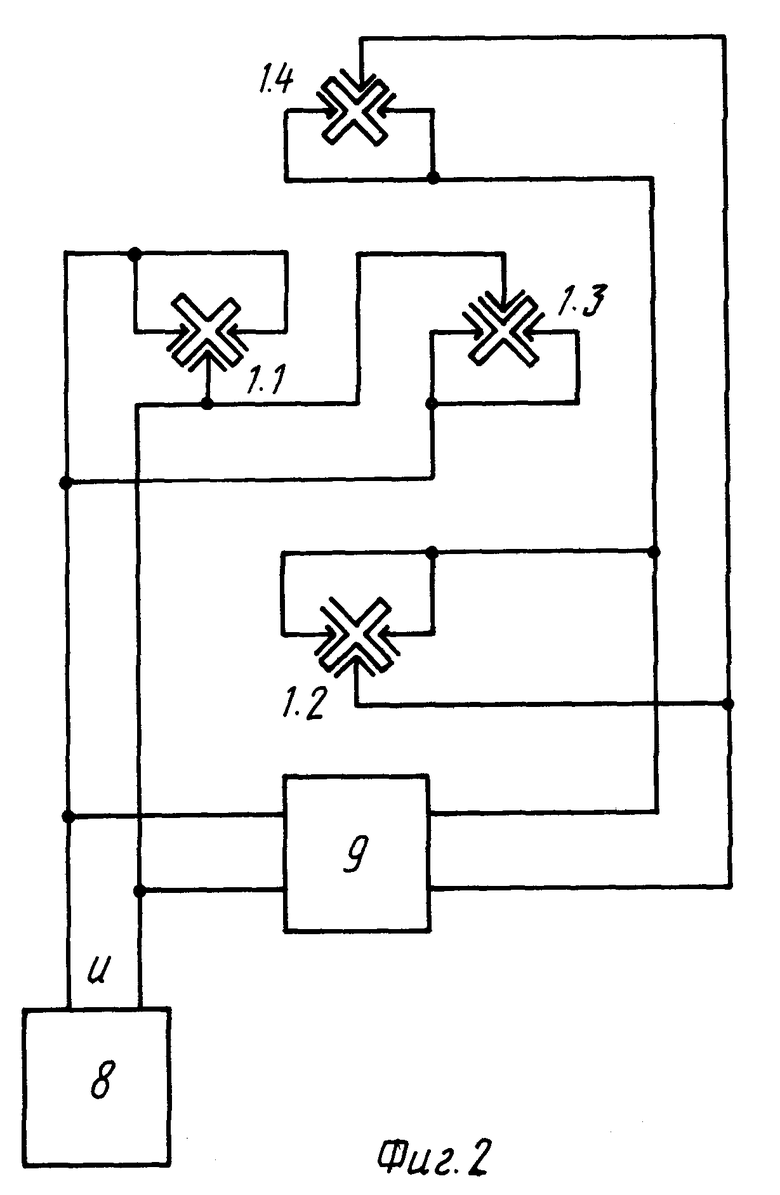
Пьезоэлектрический двигатель содержит четыре пьезоэлемента 1 (1.1, 1.2, 1.3, 1.4), одним концом закрепленных во втулке 2, жестко связанной с корпусом статора 3. Пьезоэлемент 1 выполнен в виде монолитного стержня с крестообразным сечением из пьезоэлектрической керамики с электродами на поверхности пластин, образующих стержень. Другим концом пьезоэлементы 1 посредством толкателей 4 прикреплены к кольцу 5 из магнитно-мягкого материала, например, - электротехнической стали. Пьезоэлементы 1.1, 1.3 и 1.2, 1.4 прикреплены попарно на взаимно перпендикулярных диаметрах кольца 5. На роторе 6 закреплен постоянный магнит 7, выполненный в виде звездочки из магнитно-твердого материала, например - соединения самарий-кобальт. Между кольцом 5 и магнитом 7 находится управляемый воздушный зазор. (Термин "воздушный" применен условно, т.к. двигатель может работать в управляемой газовой среде, в том числе - в вакууме). Пьезоэлементы 1.1 и 1.3 соединены электрически параллельно и подключены к источнику питания переменного тока 8 (фиг.2). При этом у пьезоэлемента 1.1 управляющие электроды обращены в сторону роторного магнита 7, а у пьезоэлемента 1.3 подключены электроды, обращенные в противоположную сторону. Аналогично подключены электроды пьезоэлементов 1.2 и 1.4, соединенных электрически параллельно и подключенных к источнику питания 8 через фазосдвигающее устройство 9, обеспечивающее сдвиг фазы на 90o и представляющее собой, например, двойной Т-образный мост.
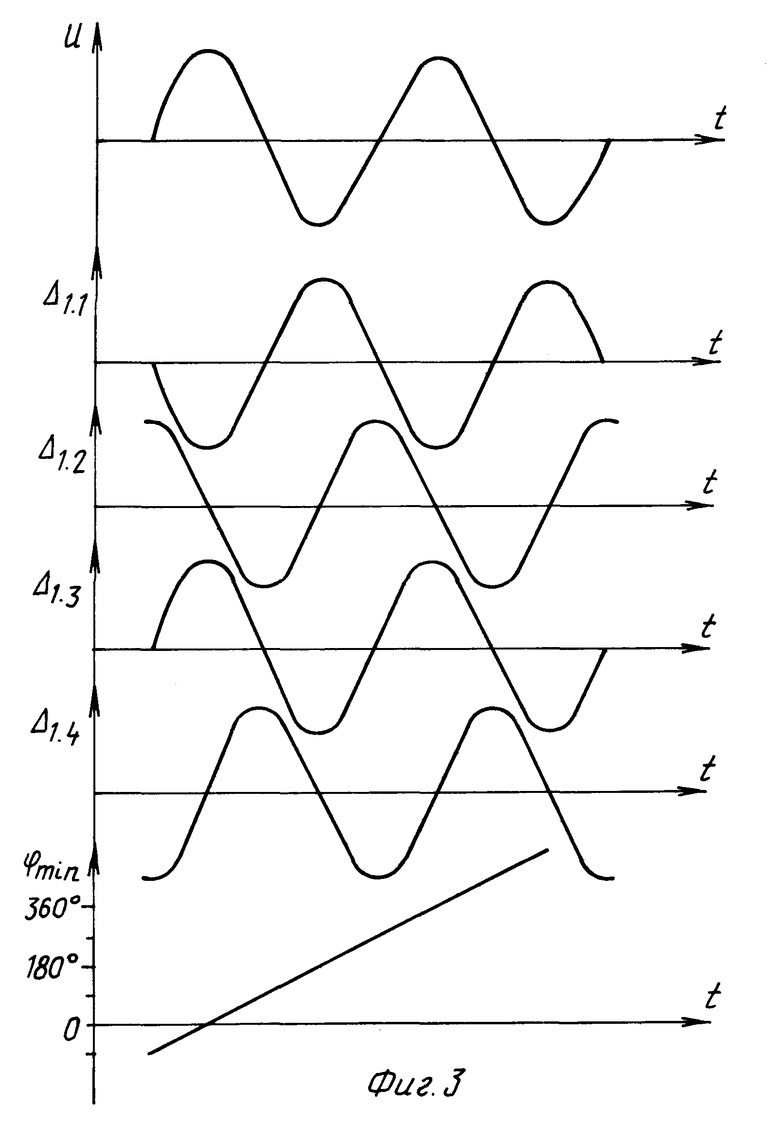
Пьезоэлектрический двигатель работает следующим образом. При подаче электрических колебаний синусоидальной формы от внешнего источника питания пьезоэлементы 1.1 и 1.3 деформируются синфазно с управляющим напряжением U, причем изгибные деформации пьезоэлементов 1.1 и 1.3 антипараллельны, т.е. пьезоэлемент 1.1 деформируется в направлении роторного магнита 7, а пьезоэлемент 1.3 - в противоположном направлении (деформации Δ1.1 и Δ1.3 на фиг. 3). Деформация пьезоэлементов 1.2 и 1.4 ( Δ1.2 и Δ1.4 на фиг.3) происходит аналогично, но со сдвигом по фазе 90o, который создается фазосдвигающим устройством 9. В результате происходит качание статорного кольца 5 в двух взаимно перпендикулярных направлениях и изменение воздушного зазора между кольцом 5 и магнитом 7, синхронное с управляющим напряжением, т.е. угол перемещения минимального зазора ϕmin линейно изменяется во времени. Зона минимального воздушного зазора обладает минимальным магнитным сопротивлением, где концентрируются силы магнитного притяжения между магнитом 7 и кольцом 5. Круговое перемещение зоны минимального воздушного зазора создает тангенциальную составляющую силы магнитного притяжения, под действием которой происходит вращение ротора 6.
При изменении знака фазового сдвига, формируемого фазосдвигающим устройством 9, происходит изменение направления перемещения минимального воздушного зазора и, следовательно, изменение направления вращения ротора 6.
Выше описаны конструкция и работа пьезоэлектрического двигателя с монолитными пьезоэлементами.
Возможен вариант двигателя с многослойными пьезоэлементами, дающий дополнительный технический эффект: снижение управляющего напряжения. При этом возможно применение как поперечного, так и продольного пьезоэффекта, с соблюдением принципа антипараллельности деформаций в каждой паре пьезоэлементов. В остальном работа пьезоэлектрического двигателя аналогична первому варианту.
Применение двух пар пьезоэлементов с антипараллельной деформацией в качестве электромеханических преобразователей, качающегося статорного кольцевого магнитопровода и роторного постоянного магнита существенно повышает надежность работы пьезоэлектрического двигателя, дает возможность одновременной работы нескольких двигателей от одного источника питания, расширяет функциональные возможности устройства.
Создан новый тип нерезонансного твердотельного двигателя без фрикционного взаимодействия элементов в цепи электрического преобразования энергии - волновой пьезоэлектромагнитный двигатель.
Технические преимущества пьезоэлектрического двигателя позволяют использовать его в технологических установках с длительным циклом непрерывной работы, например - в термостатах и системах с управляемой газовой средой.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВИБРОДВИГАТЕЛЬ | 1995 |
|
RU2113050C1 |
| ФАЗОВЫЙ МОДУЛЯТОР ВОЛНОВОГО ФРОНТА | 1994 |
|
RU2080638C1 |
| ИСПОЛНИТЕЛЬНОЕ УСТРОЙСТВО РАСТРОВОГО МИКРОСКОПА | 1996 |
|
RU2114493C1 |
| ФАЗОВЫЙ МОДУЛЯТОР ВОЛНОВОГО ФРОНТА | 1995 |
|
RU2106670C1 |
| ВИБРОГИРОСКОП | 1997 |
|
RU2123219C1 |
| ТВЕРДОТЕЛЬНОЕ ИСПОЛНИТЕЛЬНОЕ УСТРОЙСТВО | 1993 |
|
RU2047199C1 |
| ВТОРИЧНЫЙ ИСТОЧНИК ПИТАНИЯ | 1992 |
|
RU2038656C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПЬЕЗОКЕРАМИЧЕСКИХ ЭЛЕМЕНТОВ | 1991 |
|
RU2029445C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ КЕРАМИЧЕСКИЙ МАТЕРИАЛ | 1993 |
|
RU2081093C1 |
| СПОСОБ ПОЛУЧЕНИЯ КЕРАМИКИ МЕТАНИОБАТА ЛИТИЯ | 1991 |
|
RU2017700C1 |
Изобретение относится к пьезоэлектрическим двигателям, предназначено для использования в качестве привода устройств микроробототехники и позволяет повысить надежность в работе твердотельного двигателя, осуществить совместную работу нескольких двигателей от одного источника питания переменного тока и расширить функциональные возможности устройства. Двигатель содержит статор, ротор, четыре пьезоэлемента с крестообразным поперечным сечением, постоянный магнит из магнитно-твердого материала в виде звездочки, размещенный на роторе, и кольцо из магнитно-мягкого материала, установленное перпендикулярно оси двигателя с зазором относительно ротора. Первый пьезоэлемент подключен к источнику питания переменного тока, второй пьезоэлемент подключен к источнику питания через фазосдвигающее устройство. Первый и третий, а также второй и четвертый пьезоэлементы попарно соединены электрически параллельно и одним концом попарно прикреплены к кольцу на взаимно перпендикулярных диаметрах последнего, а другим концом каждый пьезоэлемент закреплен в корпусе. 3 ил.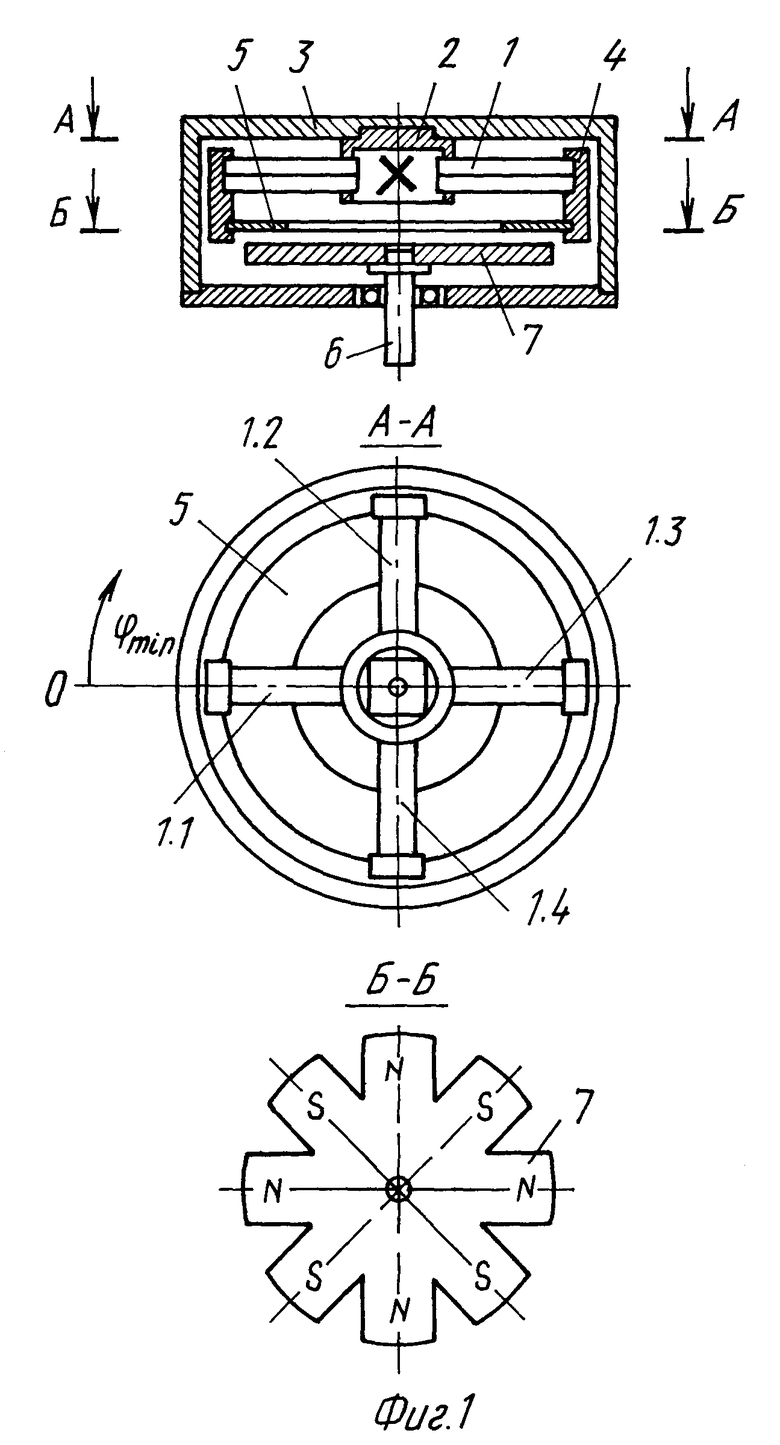
Пьезоэлектрический двигатель, содержащий статор и ротор, установленные с зазором между ними, средство взаимодействия между статором и ротором в виде элементов из магнитно-твердого и магнитно-мягкого материалов и пьезоэлементы, отличающийся тем, что на роторе размещен постоянный магнит в виде звездочки, на статоре размещено кольцо из магнитно-мягкого материала, установленное перпендикулярно оси двигателя с зазором относительно постоянного магнита ротора, и четыре пьезоэлемента в виде стержней с крестообразным поперечным сечением, одним концом каждый пьезоэлемент закреплен в корпусе статора, а другим концом первый и третий, второй и четвертый пьезоэлементы попарно прикреплены к кольцу из магнитно-мягкого материала на его взаимно перпендикулярных диаметрах с возможностью осуществления попарно первым и третьим, вторым и четвертым пьезоэлементами антипараллельных изгибных деформаций в направлении, параллельном продольной оси двигателя, при этом первый и третий пьезоэлементы соединены электрически параллельно и подключены к источнику питания переменного тока, второй и четвертый пьезоэлементы соединены электрически параллельно и подключены к источнику питания через фазосдвигающее устройство.
| Пьезоэлектрический двигатель | 1978 |
|
SU775792A1 |
| ЭЛЕКТРОСТАТИЧЕСКИЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 1972 |
|
SU430459A1 |
| Пьезоэлектрический двигатель | 1976 |
|
SU614477A1 |
| Пъезоэлектрический двигатель | 1977 |
|
SU651434A1 |
| Электропривод | 1978 |
|
SU668033A1 |
| Вибродвигатель | 1978 |
|
SU706913A1 |
| Вибродвигатель | 1978 |
|
SU765910A1 |
| US 4642509 A, 1987 | |||
| US 4814660 A, 1989. | |||
