Изобретение касается способа для управления искусственным коленным суставом, имеющим верхнюю часть с передней и задней стороной, расположенную на верхней части с возможностью поворота вокруг коленной оси нижнюю часть с передней и задней стороной, расположенный на нижней части отдел стопы и исполнительный механизм, которым может задаваться доступный угол колена между задней стороной верхней части и задней стороной нижней части в конце фазы переноса.
Искусственные коленные суставы используются в протезах, ортезах и экзоскелетах. Искусственный коленный сустав имеет верхнюю часть и нижнюю часть, размещенные относительно друг друга с возможностью поворота вокруг коленной оси. В самом простом случае коленный сустав выполнен как коленный сустав с одной осью, у которого, например, болт или два расположенных на одной поворотной оси места установки подшипника образуют единственную коленную ось. Также есть коленные суставы, которые не образуют зафиксированную ось вращения верхней части относительно нижней части, а имеют либо скользящие вниз или перекатывающиеся поверхности, либо множество соединенных друг с другом на шарнирах направляющих деталей. Достаточно часто в уровне техники описаны так называемые четырехосные коленные суставы с пружинными устройствами и амортизаторами. Помимо этого, есть пятиосные и шестиосные коленные суставы. У ортезов и экзоскелетов многоосные формы исполнения искусственных коленных суставов являются исключением.
Коленные суставы протезов зачастую изготавливаются и поставляются как полностью укомплектованный конструктивный узел с верхними средствами подсоединения для закрепления гильзы бедра или с другим приспособлением для крепления верхней части на пациенте, а также крепежными приспособлениями для крепления нижней части, например, трубки голени или протеза стопы. У ортезов или экзоскелетов крепежные приспособления для крепления искусственного коленного сустава на пациенте могут быть расположены непосредственно на верхней части и нижней части, например, в форме ремней, манжет или чаш, расположенных на шинах или внешних рамных конструкциях.
Для влияния на разгибательное и/или сгибательное движение известно расположение исполнительного механизма между верхней частью и нижней частью, например, в форме амортизатора или привода.
DE 10 2013 011 080 А1 касается способа управления ортопедическим суставным приспособлением нижней конечности с верхней частью и расположенной на ней на шарнирах нижней частью, между которыми расположено преобразующее приспособление, с помощью которого во время поворота верхней части относительно нижней части механическая работа преобразуется из относительного движения и сохраняется, по меньшей мере, в накопителе энергии. Энергия с задержкой во времени снова подводится к суставному приспособлению, чтобы поддерживать относительное движение, причем накопленная энергия преобразуется обратно, а подвод механической работы во время поддержания относительного движения происходит контролируемым образом. Дополнительно к преобразующему приспособлению может быть предусмотрен отдельный амортизатор в форме гидравлического или пневматического амортизатора, который выполнен с возможностью регулировки, поэтому во время ходьбы амортизационным приспособлением можно влиять на сопротивление как в направлении сгибания, так и в направлении разгибания.
US 5,181,931 A касается поворотного соединения между двумя частями ортопедического приспособления с верхней частью и нижней частью и с регулируемым механическим разгибательным упором.
EP 2 240 124 B1 касается ортопедического коленного сустава с верхней частью, на которой расположены верхние присоединительные средства, с расположенной с возможностью поворота на верхней части нижней частью с присоединительными средствами для ортопедическим компонентов и с упором для ограничения разгибательного движения. Упор выполнен с возможностью смещения и связан с регулировочным устройством, связанным, в свою очередь, с управляющим устройством, которое в зависимости от данных датчика приводит в действие регулировочное устройство и изменяет положение упора соответственно так, чтобы разгибательный упор перемещался вперед для ходьбы, а для опоры отводился обратно.
Искусственный коленный сустав имеет в конструктивно максимальном достижимом выпрямлении угол колена 180°; гиперэкстензия, то есть угол на задней стороне больше 180°, как правило, не предусмотрена. Поворот нижней части относительно верхней части назад обозначается как сгибание (флексия) колена, поворот вперед как разгибание (экстензия). При начальном контакте стопа в конце фазы переноса к началу опорной фазы ставится на землю. При горизонтальной ходьбе это приводит, большей частью, к удару пяткой, что означает, что стопа сначала ставится пяткой. Если искусственный коленный сустав остается в выпрямленном, прямом положении, то это приводит к непосредственному проведению силы в таз, что ощущается как очень неприятное. Поэтому аналогично естественной ходьбе в протезах или ортезах допускается или проводится так называемое сгибание в опорной фазе, при котором после удара пяткой коленный сустав сгибается вокруг коленной оси гидравлическим амортизатором, при определенных обстоятельствах, в направлении силы сопротивления. С помощью разгибательного упора в конце фазы переноса искусственный коленный сустав при определенном угле колена может быть остановлен, чтобы начать сгибание в опорной фазе или чтобы способствовать ее началу. Выставление разгибательного упора сообразно тому, что при начальном наступании в конце фазы переноса не имеет место полностью выпрямленная нога, то есть не выставляется конструктивно максимально предусмотренный угол колена, а уменьшается доступный угол колена, обозначается как пред-сгибание и имеет положительный эффект на походку, поскольку возможна более равномерная ходьба. Типичные значения разгибательного упора для горизонтальной ходьбы находятся примерно у 176° угла колена.
В ситуациях ходьбы, отличающихся от горизонтальной ходьбы, приспособленное для горизонтальной ходьбы управление зачастую является недостаточным и ограничивает пользователя в таких особых ситуациях.
Задачей данного изобретения является предоставление способа, который позволяет пользователю искусственного коленного сустава лучше справляться с особыми ситуациями при ходьбе.
Согласно изобретению эта задача решается с помощью способа с признаками независимого пункта формулы изобретения. Предпочтительные формы исполнения и усовершенствования изобретения раскрыты в зависимых пунктах, описании, а также фигурах.
Соответствующий изобретению способ управления искусственным коленным суставом, имеющим верхнюю часть с передней и задней стороной, расположенную на верхней части с возможностью поворота вокруг коленной оси нижнюю часть с передней и задней стороной, расположенный на нижней части отдел стопы, по меньшей мере один датчик, соединенное по меньшей мере с одним датчиком управляющее устройство и исполнительный механизм, который связан с управляющим устройством и которым может регулироваться доступный угол колена между задней стороной верхней части и задней стороной нижней части в конце фазы переноса, предусматривает, чтобы из данных по меньшей мере одного датчика делалось заключение о преодолеваемой разнице высоты отдела стопы до стопы или до отдела стопы контрлатеральной стороны пациента в его опорной фазе или до непосредственно предшествующей опорной фазы отдела стопы и угол колена, доступный в фазе переноса, регулировался предпочтительно в фазе переноса, в частности, в зависимости от определенной или оцененной разницы высоты. Доступный угол колена, в частности доступный при распрямлении в фазе переноса угол колена отличается от конструктивно максимально предусмотренного угла колена тем, что он выставляется исполнительным механизмом и является изменяемым, в то время как конструктивно максимально предусмотренный угол колена, как правило, означает выпрямленную, максимально разогнутую ногу с углом колена 180°. Конструктивно максимально предусмотренный угол колена предварительно задан с помощью конструирования и расположения компонентов искусственного коленного сустава.
В случае преодоления разницы высот может идти речь, с одной стороны, о ходьбе в гору, ходьбе по лестнице или, с другой стороны, о преодолении физической разницы высот. Но также возможно, что идет речь о намерении пользователя соответствующим образом расположить стопу в отсутствии физического уклона или разницы высот. При ходьбе по лестнице речь может идти о преодолении одной или нескольких ступеней и/или выступов. Это означает, что может идти речь о подъеме на выступ, например, преодоление края тротуара или же о ходьбе по лестнице, то есть, по нескольким следующим друг за другом ступенькам.
Выставление разгибательного упора соответственно тому, что при начальном контакте, например, начальном ударе пяткой, в конце фазы переноса нет полностью распрямленной ноги, то есть не выставляется конструктивно максимально предусмотренный угол колена, а доступный угол колена уменьшается, чтобы обеспечить так называемое пред-сгибание, имеет положительное влияние на походку, поскольку возможна равномерная ходьба. Ходьба в гору или ходьба по лестнице, или другое преследуемое пользователем искусственного коленного сустава преодоление разницы высот отличается от горизонтальной походки. При обычной горизонтальной ходьбе контрлатеральная и ипсилатеральная стопа во время начального наступания имеют одно и то же вертикальное расстояние до бедра. В противоположность этому, при преодолении разницы высот вертикальное расстояние опережающей стопы до бедра должно сократиться, чтобы уровнять разницу высот. При физиологической походке это происходит путем ярко выраженного сгибания бедра на стороне опережающей ноги и постановки ноги в соответственно предварительно согнутое положение. Затем прежде всего при больших разницах высот и малых длинах шагов центр тяжести тела остается вначале над опорной ногой, и только с начальной постановкой опережающей стопы вес переносится. При горизонтальной ходьбе, длины шагов экипированной, то есть снабженной искусственным коленным протезом, ноги, будь то протезом, ортезом или экзоскелетом, одинаковы с неэкипированной ногой. Центр тяжести тела перемещается при горизонтальной ходьбе, в основном, равномерно между опорной ногой и переносимой ногой.
При намерении пользователя пойти в гору или подняться по лестнице, или при ином преодолении разницы высот при ходьбе центр тяжести или таз не перемещается равномерно вперед, напротив, пользователь искусственного коленного протеза стоит на задней ноге, которая вряд ли способствует так называемому вышагиванию. Близкое к полному вышагивание происходит через ногу в фазе переноса, то есть ту ногу, что поднята и ставится или должна быть поставлена на более высокий уровень, чем опорная нога. В зависимости от определенной или оцененной разницы высот отдела стопы экипированной стороны, то есть той стороны, которая снабжена искусственным коленным суставом, до стопы или отдела стопы контрлатеральной стороны пациента в опорной фазе регулируется доступный угол колена искусственного коленного сустава. Оказалось, что при более сильном по сравнению с ровной ходьбой пред-сгибании и, таким образом, при меньшем доступном угле колена существенно облегчается ходьба в гору и ходьба по лестнице. В противоположность наступанию с распрямленным или слегка пред-согнутым коленным суставом укорачивается, при равной разнице высот при наступании с более сильно пред-согнутым суставом, горизонтальное плечо рычага между точкой приложения силы на стопе и бедром и, в дальнейшем, необходимый момент распрямления бедра, чтобы нести центр тяжести тела через экипированную ногу. К центру тяжести тела не должен быть применен рычаг по всей распрямленной длине ноги, а только относительно меньший рычаг по причине укороченной длины ноги. Благодаря этому возможно, в общем, достичь гармоничного движения при ходьбе в гору или ходьбе по лестнице. Нагружаемые компенсационные механизмы, такие как усиленное подошвенное сгибание стопы со стороны опорной ноги или усиленный наклон вперед верхней части тела могут быть уменьшены. Длина шага находится в лучшем отношении к контрлатеральной стороне, благодаря чему характер походки становится более симметричным и естественным. К тому же, при экипировке пассивными стопами или отделами стоп стопа ставится на пол с более благоприятной ориентацией. Предпочтительно доступный угол колена уменьшается на 5° - 30° по сравнению с максимально конструктивно предусмотренным углом. В частности, в сочетании с подвижным суставом лодыжки, например, адаптация угла лодыжки под уклон грунта, а также при активной поддержке распрямляющего движения в опорной фазе может быть предпочтительным уменьшение доступного угла колена сверх пределов этой области, в частности, при преодолении особо высоких разниц высот.
О ходьбе в гору, ходьбе по лестнице или ином преследуемом пользователем преодолении разницы высот можно судить по определенной или оцененной разнице высот. Предпочтительно разница высот между стопой или отделом стопы контрлатеральной ноги и опережающей, находящейся в фазе переноса стопой или отделом стопы привлекается для управления. Другой возможностью является привлечение разницы высот, которую преодолевает ипсилатеральная стопа в фазе переноса.
Доступный угол колена, в частности доступный при разгибании в фазе переноса, может быть адаптирован, в частности, во время фазы переноса шага. Тем самым, адаптация происходит предпочтительно таким образом, чтобы доступный угол колена был согласован с последующим начальным контактом и/или последующей опорной фазой. Однако, также возможно, чтобы доступный угол колена регулировался как раз в предыдущей опорной фазе или на предыдущем шаге, в частности, чтобы на предыдущем шаге была распознана ходьба в гору, ходьба по лестнице и/или намерение преодолеть разницу высот, и на основе этой информации был адаптирован доступный угол колена для последующего шага. Также, например, возможно, чтобы доступный угол колена регулировался только тогда, когда для нескольких следующих друг за другом шагов распознается ходьба в гору, ходьба по лестнице и/или намерение преодолеть разницу высот. Далее возможно, чтобы доступный угол колена оставался неизменным на протяжении нескольких следующих друг за другом шагов, например, когда совершаются несколько следующих друг за другом шагов в гору, а регулировка происходила только тогда, когда распознается отличающаяся ситуация.
В конечной опорной фазе может быть доступным сгиб колена при малом сопротивлении сгибу, и/или может быть начато сгибание колена, в частности, в зависимости от данных датчиков, которые допускают заключения о преодолении разницы высот, при этом регулируется доступный в фазе переноса угол колена.
Усовершенствование изобретения предусматривает, что при подъеме наверх, т.е. при увеличивающейся противоположно направлению гравитации разнице высот, доступный угол колена уменьшается. Чем больше разница высот между стопой опорной ноги и самой ноги, совершающей движение, тем меньшим устанавливается доступный угол колена. Таким образом, при более высокой ступеньке или при более крутой местности разгибание прекращается раньше. Наоборот это означает, что при плоских ступенях или малом подъеме доступный угол колена уменьшается менее сильно, благодаря чему достигается облегченное движение вперед. Адаптация доступного угла колена к разнице высот может производиться постоянно и/или на нескольких дискретных этапах. К тому же возможно, чтобы доступный угол колена, начиная с определенной разницы высот больше не уменьшался. В частности, путем адаптации угла колена к разнице высот и/или высоте шага возможно уменьшить нагрузку на экипированную или ипсилатеральную сторону пользователя искусственного коленного сустава, который, как правило, не располагает полной функциональной способностью ножной мускулатуры.
Преодолеваемая разница высот как параметр для доступного угла колена может быть определена и/или рассчитана по траекториям тазобедренного сустава, коленной оси и/или отдела стопы ипсилатеральной стороны. При этом траектория описывает временной характер положения точки в пространстве. Линейный путь точки, связанной с искусственным суставом и расположенной, например, на верхней части или нижней части, или на коленной оси, и, тем самым, и вертикальная компонента, может или могут быть определены, например, из их вычисленных значений ускорения путем двойного интегрирования. Начальные условия интегрирования определяются, например, кинематической моделью, при этом начало интегрирования предпочтительно находится в поздней опорной фазе. Необходимые для кинематической модели сегментные длины могут быть измерены и сохранены в управляющем устройстве, необходимом для вычисления управляющих сигналов для исполнительного механизма. По кинематической цепочке из траектории точки с помощью относительных степеней свободы и сегментных длин можно сделать заключение о таковых для другой точки, например, бедра, коленной оси или отдела стопы. Степени свободы и сегментные длины известны или сохранены в управляющем устройстве, поэтому для определения не должны использоваться данные движения или другие данные неэкипированной, контрлатеральной ноги. Например, ускорение и ориентация нижней части определяются датчиком исходного положения, датчиком угла колена определяется угол между нижней и верхней частью, и с помощью интегрирования данных ускорения и кинематической цепочки определяется траектория, скорости и ускорения бедра. В качестве индикаторов преодоления разницы высот могут быть привлечены, в частности, скорости и ускорения, предпочтительно, вертикальные компоненты. При преодолении разницы высот приподнимаются, с одной стороны, центр тяжести тела и, тем самым, бедро. С другой стороны, колено перемещается особенно быстро вперед и вверх. Альтернативно или в дополнение могут быть привлечены пройденный путь, скорость и/или ускорение одной или нескольких точек, в частности, нижней части и/или коленной оси, в частности, соотношение горизонтальной и вертикальной компоненты, чтобы сделать заключение о преодолении разницы высот.
Поскольку можно предположить, что в опорной фазе контрлатеральной стороны, когда стопа находится на полу, скорость там равна 0, в частности, горизонтальная компонента скорости, то траектория бедра альтернативно или в дополнение может быть определена из одного или нескольких измерений угла контрлатеральной стороны и известных сегментных длин. Тогда общее вынесение бедра вперед и приподнимание бедра вычисляется с помощью измерения угла и известной длины ноги контрлатеральной стороны.
Разница высот между контрлатеральной стопой в опорной фазе и ипсилатеральной стопой или отделом стопы в фазе переноса может быть вычислена или оценена по вертикальному пути тазобедренного сустава экипированной ипсилатеральной ноги, по вертикальному пути коленной оси и/или вертикальному пути отдела стопы и может служить параметром для доступного угла колена. Вертикальный путь тазобедренного сустава экипированной ноги может быть определен, например, из вычисленных значений ускорения точки, жестко связанной с искусственным коленным суставом, например, размещенной на верхней части или нижней части, или на коленной оси, как описано выше. Путем двойного интегрирования определяется траектория этой точки. По кинематической цепочке отсюда определяется траектория тазобедренного сустава как функция относительных степеней свободы и сегментных длин.
Степени свободы и сегментные длины известны, сохранены и доступны в управляющем устройстве, поэтому из них может быть вычислен вертикальный путь тазобедренного сустава без необходимости использования данных движения или других данных неэкипированной контрлатеральной ноги. Вертикальный путь коленной оси вычисляется, как описано выше, путем двойного интегрирования ускорений жестко закрепленной точки на искусственном коленном суставе или расположенной на нем компоненте, например, гильзе протеза, то же самое имеет силу для вертикального пути отдела стопы.
Движение бедра и/или туловища может быть определено также напрямую датчиком, который установлен на бедре или туловище, например, инерциальным датчиком, который регистрирует ускорения. Из ускорений могут быть вычислены путем двойного интегрирования скорости и траектории.
Усовершенствование изобретения предусматривает, чтобы в качестве параметра для доступного угла колена определялась разница высот по углу бедра экипированной ноги или ориентации верхней части в пространстве и, при необходимости, по их временной характеристике. Для ориентации верхней части в пространстве на верхней части может быть расположен инерциальный угловой датчик, поэтому возможно прямое измерение пространственного положения верхней части. Так в или на искусственном коленном суставе могут быть расположены, например, инерциальный угловой датчик или IMU (inertial measurement unit). Обычно на протезном коленном суставе или другом искусственном коленном суставе также расположен датчик угла колена, поэтому совместно из ориентации нижней части в пространстве и угла колена, может быть вычислен угол бедра, ориентация верхней части в пространстве. Ориентация в пространстве представляет собой ориентирование, по существу, к неизменяемому базовому направлению, например, направлению гравитации или горизонтали. Для этого на контрлатеральной неэкипированной стороне пациента не нужны датчики.
Угол бедра может быть измерен непосредственно как относительный угол между корпусом и верхней частью, соответственно, бедром. Альтернативно можно предположить или измерить с помощью IMU ориентацию корпуса в пространстве и совместно с ориентацией верхней части или бедра определить угол бедра. В частности, могут быть использованы симметрия характеристик угла бедра и/или ориентации верхней части относительно вертикального нейтрального положения, например, в качестве соотношения или разницы, превышенный диапазон угла и/или высокая сгибательная скорость в качестве индикаторов для установления и/или определение преодолеваемой разницы высот. Тогда можно предположить разницу высот против силы тяжести, когда верхняя часть приводится в сильное сгибание, охватывается большой диапазон угла и/или происходит особенно быстрое сгибание бедра. При этом пороги и величины для распознания могут быть отнесены к скорости ходьбы, чтобы отличать влияние от скорости ходьбы на временные характеристики углов от такового от преодолеваемой разницы высот.
Усовершенствование способа предусматривает, чтобы определялась, высчитывалась и/или оценивалась преодолеваемая разница высот между экипированной ногой и неэкипированной ногой из отношения поступательного горизонтального движения тазобедренного сустава экипированной ноги или коленной оси к углу бедра или ориентации верхней части в пространстве. Для вычисления разницы высот может быть рассчитано поступательное движение точки на протезе или ортезе, например, движение коленной оси, например, с помощью двойного интегрирования измеренных линейных ускорений с пригодными начальными условиями, а также с помощью абсолютного и относительного угла кинематической цепочки вплоть до бедра. Начальные условия интегрирования определяются кинематической моделью, при этом начало интегрирования находится предпочтительно в поздней опорной фазе. При предположенном чистом движении абсолютно твердого тела, например, точка переката на отделе стопы и ее временной характер может быть описана и как функция нагрузки и положения или места. Необходимые для кинематической модели сегментные длины могут быть измерены и сохранены в управляющем устройстве, необходимом для вычисления управляющих сигналов для исполнительного механизма. С помощью поступательного движения бедра или горизонтального движения тазобедренного сустава возможно оценить движение и получить заключения о походке и ситуации при ходьбе. Горизонтальная компонента движения бедра представляет собой долю продвижения вперед, которая производится опорной ногой. Угол бедра или ориентация верхней части управляет расположением стороны переносимой ноги. Оба аспекта движения скоординированы друг с другом и, следовательно, пригодны для распознавания, предпринимается ли ходьба в гору или ходьба по лестнице. На основании координации движения как опорной ноги, так и переносимой ноги можно сделать заключение о достигаемом движении переносимой ноги экипированной ноги. Если верхняя часть по отношению к горизонтальному движению бедра приводится особенно сильно или быстро в сгибание, то можно сделать заключение о преодолеваемой разнице высот против силы тяжести. Альтернативно также могут быть использованы пропорции горизонтального движения бедра и горизонтального движения коленной оси, а также горизонтального движения коленной оси и ориентации верхней части относительно угла бедра. При этом все величины выводятся полностью из данных датчиков экипированной стороны.
Усовершенствование изобретения предусматривает, чтобы разница высот могла быть рассчитана или оценена из определенного угла колена, например, с помощью прямого измерения датчиком угла колена и/или из отношения пространственной ориентации верхней части и/или нижней части, соответственно, бедра и/или голени. Поскольку в распоряжении имеется угол бедра, то он может быть использован для вычисления разницы высот. Угол бедра может быть вычислен или оценен либо с помощью предполагаемой ориентации верхней части тела и определенной ориентации верхней части тела, либо бедра в пространстве при помощи IMU, либо определен датчиком пространственного положения на верхней части тела, например, на ортезе или экзоскелете, в комбинации с ориентацией верхней части от IMU. Разница высот может быть определена или оценена из временной характеристики, из отношения угла колена к ориентации верхней или нижней части и/или отношения ориентации верхней и нижней части друг к другу. Временная характеристика и движение сегментов друг к другу, например, особо быстрый, явно выраженный или удерживаемый сгиб, соответственно взмах, дают заключение о намерении пользователя и о преодолеваемой разнице высот. Таким образом, возможно распознать в фазе переноса, происходит ли ходьба в гору, ходьба по лестнице или иное преодоление разницы высот, поэтому доступный угол колена устанавливается и выставляется, в частности, в фазе переноса.
Достигаемый угол колена может быть выставлен с помощью регулируемого механического разгибательного упора. Механический упор может регулироваться различными исполнительными механизмами, например, конечным упором с приводом от двигателя, путем разворота эксцентрика, путем продольного смещения упора, путем придания жесткости буферу или другим образом. Также возможно регулировать разгибательный упор гидравлически или пневматически, закрывая клапан в зависимости от достигнутого угла колена, поэтому никакая жидкая среда не может течь из камеры расширения в камеру сжатия или уравнительную емкость. Также возможно придавать жесткость разгибательному упору путем придания жесткости подушке, например, путем наполнения упорного буфера гидравлической жидкой средой или пневматической жидкой средой. Упор может быть сформирован путем блокировки привода, например, двигателя, при этом регулировка происходит путем блокировки двигателя после достижения требуемого угла колена. Альтернативно регулировка разгибательного упора может происходить магнитореологической жидкой средой и активацией или деактивацией магнитного поля. При применении функциональной электростимуляции путем активации колено-сгибательной мускулатуры может быть реализовано затормаживание. У всех названных способов нет абсолютно необходимости способствовать физической блокаде в направлении распрямления. Достаточно разгибательное движение при и/или перед необходимым углом колена довести до останова и/или замедлить таким образом, чтобы не был превышен доступный угол колена, например, путем прогностического регулирования. С помощью названных исполнительных механизмов также возможно управлять сопротивлением угла колена от сгибания или распрямления, чтобы достичь проконтролированного распрямляющего и/или сгибающего движения. Также возможно активно распрямлять и/или сгибать сустав исполнительным механизмом, например, двигателем, насосом, пружиной, пружинным аккумулятором, с помощью электростимуляции или иным исполнительным механизмом, который может производить движение против силы, в частности, чтобы достигать желаемого масштаба сгиба колена в конце фазы переноса.
Усовершенствование изобретения предусматривает, чтобы использовался следующий параметр для доступного угла колена - ориентация нижней части в пространстве. При физиологической ходьбе по лестнице или при ходьбе в гору голень в конце фазы переноса и при начальном контакте относительно вертикали остается в сравнительно узком диапазоне углов. Следовательно, доступный угол колена может быть адаптирован так, чтобы при ходьбе в гору или ходьбе по лестнице, или при преодолении препятствия или разницы высот в конце фазы переноса и/или при начальном контакте достигалась заданная ориентация нижней части. К тому же, из ориентации голени при начальном контакте можно заключить о том, что имеет место ходьба в гору или ходьба по лестнице, или преодоление препятствия или разницы высот. В то время как ориентация верхней части в пространстве при начальном контакте зависит от достигаемой высоты шага, ориентация нижней части в пространстве изменяется лишь незначительно. На основе определенной высоты шага может быть предварительно задана достигаемая ориентация нижней части при начальном контакте и рассчитан соответствующий доступный или достигаемый угол колена в зависимости от ориентации верхней части.
Достигаемая ориентация нижней части может зависеть, наряду с высотой шага, от скорости ходьбы и/или длины шага. Со скоростью ходьбы и длиной шага изменяются наложенные пользователем моменты бедра, вышагивание опережающей ногой, длительность шага, а также точка приложения силы на стопах протеза или отделе стопы и/или их временная характеристика. Поэтому предпочтительно соответственно адаптировать доступный угол колена. В частности, предпочтительно при меньшей скорости ходьбы уменьшать доступный угол колена. Скорость ходьбы, а также длина шага могут быть определены по данным датчиков, в частности, инерциальными датчиками, которые регистрируют ориентацию сегментов в пространстве и ее изменение во времени, а также ускорения. Из ускорений путем интегрирования могут быть определены скорости и положение. Длина шага может быть выведена, в частности, из горизонтального движения бедра и/или коленной оси. Альтернативно или в дополнение длина шага может быть выведена из наклона вперед экипированной ноги в конце конечной (терминальной) опорной фазы.
Усовершенствование способа предусматривает, чтобы разница высот определялась или оценивалась из угла колена, измеренного датчиком угла колена на искусственном коленном суставе, и пространственного положения верхней части или нижней части, измеренного расположенным на искусственном коленном суставе датчиком пространственного положения. Благодаря этому возможно в фазе переноса распознать, происходит ли ходьба в гору или ходьба по лестнице, поэтому в фазе переноса устанавливается и выставляется как раз увеличенное пред-сгибание и уменьшенный доступный угол колена. Разница высот может быть определена по трем параметрам, углу колена, ориентации в пространстве верхней части и ориентации в пространстве нижней части, альтернативно разница высот определяется по двум параметрам из трех, например, по обеим пространственным ориентациям или углу колена в комбинации с пространственной ориентацией либо верхней части, либо нижней части.
Усовершенствование изобретения предусматривает, чтобы доступный угол колена выставлялся в фазе переноса экипированной ипсилатеральной ноги и сохранялся вплоть до достижения предварительно определенного положения в пространстве и/или движения нижней части и/или верхней части, предварительно определенного вращения и/или скорости вращения нижней части и/или верхней части в пространстве, угла сустава лодыжки, предварительно определенной точки приложения силы в отдел стопы, предварительно определенной силы на отдел стопы, заданного момента на отдел стопы, коленную ось или ось бедра, положения вектора реактивной силы пола, заданного ускорения на отдел стопы и/или за заданный промежуток времени. Только после достижения, например, предварительно определенного пространственного положения или поворота нижней части и, таким образом, голени, в частности, после смены направления движения голени и/или достаточного уменьшения обратного наклона голени по сравнению с концом фазы переноса можно заключить о том, что произошло достаточное нагружение и перекатывающее движение, поэтому может быть увеличен доступный угол колена, и коленный сустав позволено распрямить дальше. Например, можно управлять сохранением максимального угла колена при изменении пространственного положения нижней части или голени после контакта с полом. Если, например, датчиком пространственного положения определяется поворот вперед нижней части или голени на определенный угол, например, на 5°, после контакта отдела стопы с полом, то может быть отменена блокировка коленного сустава и разрешено разгибание.
Аналогичное действительно для верхней части, которая в конце фазы сгибания бедра достигает определенной ориентации в пространстве в конце цикла шага при ходьбе в гору или ходьбе по лестнице. С помощью угла сустава лодыжки могут быть получены данные о характере перекатывания, местном уклоне земли и о размещении центра тяжести над суставом лодыжки, из чего могут быть сделаны заключения о характере шага. Вместо углового датчика на или в отделе стопы и нижней части могут быть расположены силовые датчики, определяющие положение точки приложения силы на отдел стопы, а также положение и величину реактивной силы пола. С помощью характера приложения силы и реактивной силы пола от наступания пяткой вплоть до нагрузки передней части стопы, или в ходе движения перекатывания при начальном контакте на передней части стопы возможно определить или оценить продвижение и, таким образом, соответственно вовлеченную фазу движения. Датчиком ускорения на отделе стопы и/или нижней части можно определить удар начального контакта и, таким образом, сделать заключение о постановке стопы. Кроме того, из момента распрямления бедра, прежде всего, разгибающего момента, можно заключить о достигаемом движении вперед, и может быть позволено распрямление колена. В частности, возможно, чтобы сохранялся уменьшенный угол колена в фазе переноса нагрузки и/или ранней фазе переката.
Альтернативно или в дополнение после предварительно определенного времени может быть изменен разгибательный упор, чтобы с помощью увеличенного распрямляющего движения коленного сустава обеспечить повышенную надежность. Можно предположить, что после определенного истечения времени произошло либо продолжение движения, либо же изменение формата движения, поэтому желательна повышенная защита с помощью распрямленного коленного сустава. Например, пользователь искусственного коленного сустава может остаться стоять на ступеньке или сделать паузу при ходьбе в гору, для чего предпочтителен, например, максимально распрямленный коленный сустав.
Усовершенствование изобретения предусматривает, чтобы в следующей за фазой переноса опорной фазе было доступно распрямляющее колено движение. Распрямляющим движением можно управлять в зависимости от угла колена и/или угловой скорости колена, ориентации верхней и/или нижней части в пространстве, угла лодыжки и/или ее позиции, положения и величины реактивной силы пола. Может быть выставлено постоянное в течение распрямляющего колено движения или связанное с углом колена сопротивление распрямлению. Уровень и характер сопротивления распрямлению могут зависеть от высоты шага, длины шага, скорости ходьбы, сгиба колена и/или точки приложения силы на стопе при наступании стопы и/или при местном уклоне пола. Сопротивление против распрямления колена может расти, в частности, в ходе перекатывающего и распрямляющего колено движения, дегрессивно, линейно или прогрессивно. Распрямляющим движением можно также управлять таким образом, чтобы контролировалась скорость распрямления колена, в частности, сохранялась постоянной или не превышала ранее заданной величины. Альтернативно растягивающим движением можно управлять так, чтобы нижняя часть во время распрямления колена имела примерно постоянную ориентацию, и, таким образом, бедро перекатывалось через коленную ось, обратное вращение нижней части ограничивалось или достигался заданный поворот вперед нижней части. При физиологической ходьбе обычно происходит легкий поворот вперед голени. Благодаря отличающему от физиологической ходьбы поведению стопы или отдела стопы, например, отсутствующая возможность дорсального сгибания, может иметь смысл, в отличие от физиологической походки, достигать других характеров для движения нижней части, чем медленный поворот вперед, например, почти стоящая неподвижно нижняя часть. Силовыми датчиками можно определить точку приложения силы на стопе и управлять распрямляющим движением так, чтобы точка приложения силы во время выпрямляющего движения контролировалась, предпочтительно оставалась в средней области стопы и не перемещалась в направлении пятки или слишком рано в направлении пальцев стопы. При этом более быстрое распрямление колена способствует тому, чтобы точка приложения силы перемещалась в направлении пятки и менее быстро в направлении передней части стопы, более медленное распрямление колена способствует перемещению точки приложения в направлении передней части стопы. При наступании стопы на переднюю часть стопы предпочтительно из-за большего плеча рычага реакционной силы пола вокруг коленной оси создавать большее сопротивление распрямлению, чем при наступании пяткой. При более высокой скорости ходьбы и/или меньшем угле колена при наступании пятки целесообразно сделать возможной более быстрое распрямление коленного сустава, поэтому стопа совершает оптимальное перекатывающее движение. По углу сустава лодыжки можно определить местный уклон грунта, на основе которого может быть адаптировано управление распрямляющим движением. Упор распрямления в конце распрямления при опорной фазе предпочтительно имеет такую форму, чтобы плавно тормозить распрямляющее движение. У активного коленного сустава возможно активно поддерживать распрямляющее движение. С помощью интерфейса пользователю будет возможно адаптировать параметры управления и, таким образом, самостоятельно влиять на характер распрямления в опорной фазе. Также возможно, чтобы характеристика распрямления адаптировалась с помощью управления от шага к шагу, чтобы приспособиться к стилю передвижения пользователя, характеристике отдела стопы и/или обуви.
Усовершенствование изобретения предусматривает, чтобы после достижения минимального угла бедра и смены направления движения бедра, то есть после увеличения угла бедра, ориентация нижней части в пространстве удерживалась постоянной вплоть до обнаружения начального контакта, аксиальной силы на нижнюю часть и/или изменения угла сустава лодыжки. Начальный контакт может состояться, например, при наступании стопой на пол или упирании в предмет или в препятствие и может быть обнаружен с помощью изменения в характеристике движения, например, с помощью регистрации характеристики ускорения. Если после максимального сгиба бедра отдел стопы экипированной ноги отрывается от земли, то с помощью адаптации сопротивлений распрямлению и сопротивлений сгибанию или с помощью активной системы с приводами ориентация нижней части в пространстве может удерживаться постоянной, например, перпендикулярно или параллельно вертикали, так долго, пока, например, не будет обнаружено наступание или перекатывание. Наступание может быть обнаружено, например, с помощью обнаружения аксиальной силы или момента на нижней части, ускорений нижней части или с помощью временной характеристики угла бедра. Пауза в движении отрыва от земли может давать заключения о том, что стопа поставлена на землю, а через экипированную ногу происходит поднимание пациента на следующую ступеньку. Наряду с ориентацией нижней части может регулироваться, в частности, удерживаться постоянной ориентация соединительной линии от бедра до стопы или отдела стопы (хорда ноги) в пространстве после достижения минимального угла бедра вплоть до обнаружения наступания стопой. Если после смены направления движения бедра происходит распрямление бедра, то ориентация хорды ноги может, например, удерживаться постоянной путем активного распрямления исполнительным механизмом коленного сустава. Также угол колена в ходе распрямления бедра может регулироваться таким образом, чтобы стопа или отдел стопы сохраняла одно и то же или примерно то же горизонтальное расстояние до бедра, это значит, длина шага при движении отрыва от земли сохраняется постоянной.
Также возможно регулировать угол колена, ориентацию нижней части и/или ориентацию хорды ноги в зависимости от поступательному движения бедра, в частности, горизонтального движения бедра, предпочтительно чтобы движение переносимой ноги привести в гармоничное отношение к таковому опорной ноги. Например, может быть увеличен угол колена, когда бедро движется сильно вперед. Также возможно, чтобы достигалось распрямление колена, когда бедро после достижения первого максимального сгиба бедра снова переводится в сильное сгибание, то есть шаг на стороне переносимой ноги в поздней фазе переноса вперед удлиняется.
Усовершенствование изобретения предусматривает, чтобы ходьба в гору, ходьба по лестнице или подобное распознавалось с помощью временного характера ориентации верхней части и/или отношения ориентации верхней части к линейному, горизонтальному движению коленной оси, и регулировался доступный угол колена на основе характера и/или отношения между ориентацией верхней части и движения коленной оси. Горизонтальное движение коленной оси может быть вычислено из известной длины верхней части или бедра и характера ориентации верхней части во времени вместе с горизонтальным движением оси бедра.
Усовершенствование изобретения предусматривает, чтобы сопротивление сгибанию в фазе переноса экипированной ноги после смены направления движения нижней части, то есть движения колена, выставлялось на уровень выше, чем при горизонтальной ходьбе. В фазе переноса экипированной ноги сначала возникает сгибательное движение, то есть уменьшение угла колена. Если затем нижняя часть или голень переносится вперед, то есть изменяет движение колена со сгибания на распрямление, после того как коленная ось была поднята на повышенный уровень, является предпочтительным на сгибательное движение из соображений надежности наложить сопротивление, чтобы, например, при упирании в препятствие или ступеньку лестницы избежать спотыкания и, в частности, предотвратить нежелательный сгиб коленного сустава вокруг коленной оси.
Предпочтительно при распознании ходьбы в гору или ходьбы по лестнице или подобного может быть уменьшен угол колена в фазе переноса на 5° до 20°, чтобы задать минимально доступный угол колена.
Усовершенствование изобретения предусматривает, чтобы при распознании ходьбы в гору или ходьбы по лестнице или подобного минимально доступный угол колена в фазе переноса уменьшался по сравнению с ровной ходьбой. При ровной ходьбе обычно ограничивается сгибание колена, соответственно, сокращается с помощью сопротивления в направлении сгиба, чтобы достичь своевременного достижения распрямления колена в конце фазы переноса. С помощью меньшего, минимального угла колена при ходьбе в гору, ходьбе по лестнице или подобном нижняя часть переносится дальше и приближается к верхней части, благодаря чему при проносе увеличивается просвет под телом. Для этого предпочтительно уменьшается минимальный угол колена при увеличении преодолеваемой разницы высот. Обычные величины для уменьшения находится около 5° до 20°.
Усовершенствование изобретения предусматривает, чтобы при ходьбе в гору, ходьбе по лестнице или намеренном преодолении разницы высот в опорной фазе, предпочтительно в конечной опорной фазе, допускался сгиб колена при малом сопротивлении сгибу и/или начиналось сгибание колена. Начало сгибания колена в опорной фазе и, таким образом, при контакте стопы с землей, соответственно, под нагрузкой, соответствует физиологической ходьбе, при которой коленный сустав сгибается прежде чем стопа потеряет контакт с землей. Таким образом, начало сгибания колена происходит обычно во время перекатывающего движения стопы. Сгибание под полной или частичной нагрузкой в конце опорной фазы обозначается как фаза пред-переноса или Pre-Swing. Чтобы было возможным простое сгибание коленного сустава, сопротивление движению в направлении сгиба для этой цели в опорной фазе, предпочтительно в конечной опорной фазе, уменьшается или удерживается на малом уровне. Альтернативно у активных коленных суставов может начинаться или поддерживаться сгибательное движение под нагрузкой. Предпочтительно происходит уменьшение сопротивления движению в направлении сгиба, соответственно начало сгибательного движения на основе данных датчика. Доступный угол колена, в частности, доступный при разгибании в фазе переноса угол колена в дальнейшем адаптируется таким образом, чтобы он поддерживал ходьба в гору, ходьба по лестнице или преодоление разницы высот в следующей за этим фазе переноса и/или в следующей за этим опорной фазе. Предпочтительно, чтобы пользователь мог сохранять естественный характер движения для начала сгибания колена, а также фазы переноса и для ходьбы в гору, ходьбы по лестнице или преодоления разницы высот не должен был выполнять специальные чередования движений для начала сгибания в фазе переноса.
Усовершенствование изобретения предусматривает, чтобы доступный угол колена выставлялся при ходьбе в гору, ходьбе по лестнице или при намеренном преодолении разницы высот в фазе переноса, при этом пользователь разгружает протез, ортез или экзоскелет до начала движения сгибания колена. Начало сгибания колена может происходить, например, путем снижения коленным суставом сопротивления движению в направлении сгиба, когда разгружается ипсилатеральная сторона и/или после того, как она была разгружена, и пользователь совершает сгибание бедра или комбинацию из распрямления бедра и последующего сгибания бедра. Также возможно, чтобы для уменьшения сопротивления движению наряду с частичной или полной нагрузкой было необходимо следующее движение, например, распрямление бедра, в частности, быстрое распрямление бедра. Другая возможность - поддержка или активное начало сгибания колена при активном коленном суставе.
Усовершенствование изобретения предусматривает, чтобы достигаемый угол колена был выставляемым и/или изменяемым во времени сознательно и независимо от определенной или оцененной разницы высот. С помощью интерфейса пользователем, например, техником-ортопедом, терапевтом или конечным пользователем может быть предпринято выставление управляющих параметров. Например, пользователь вручную путем ввода соответствующих значений или, предпринимая соответствующие регулировки, может настроить, что следует увеличить и/или уменьшить доступный угол колена. При этом настойка пользователя может быть наложена на другие управляющие параметры, поэтому управление, например, дальше выставляет при больших разницах высот меньший доступный угол колена, однако, в обоих случаях выставляется соответственно больший доступный угол колена по сравнению со стандартной настойкой. Также для пользователя может быть предоставлена возможность временно полностью деактивировать уменьшенный доступный угол колена.
Также возможно, чтобы система на основе данных о ходьбе предпринимала адаптация или определение параметров для управления доступным углом колена, либо с помощью текущей само-адаптирующейся адаптации, либо путем режима настройки, который осознанно активируется и после произошедшей настройки снова деактивируется.
Усовершенствование изобретения предусматривает, чтобы преодолеваемая разница высот обнаруживалась и/или определялась путем определения дистанции до земли и/или по профилю грунта. Грунт и/или расстояние до грунта может быть измерено бесконтактно, например, закрепленной на голени и/или отделе стопы сенсорной техникой, в частности, оптически посредством лидара, радара и/или инфракрасным измерением и/или ультразвуковым измерением. Из измерений нескольких точек грунта можно сделать заключение о профиле грунта и, таким образом, об уровне преодолеваемой разницы высот. Альтернативно или в дополнение может быть измерена относительная скорость к грунту, в частности, путем применения эффекта Допплера или с помощью производной по времени от определенной дистанции. В зависимости от определенной разницы высот выставляется достигаемый угол колена, в частности, достигаемый в конце фазы переноса угол колена.
Усовершенствование изобретения предусматривает, чтобы сопротивление сгибанию коленного сустава в фазе переноса, в частности, в конце фазы переноса, и/или во время опорной фазы, в частности, во время начального контакта и/или ответа на нагрузку, выставлялось на уровень выше, чем при горизонтальной ходьбе. В фазе переноса экипированной ноги сначала происходит сгибательное движение, то есть уменьшение угла колена. Если потом происходит распрямление колена после того, как коленная ось была поднята на более высокий уровень, то предпочтительно, наложить на сгибательное движение сопротивление, которое препятствует нежелательному сгибанию коленного сустава вокруг коленной оси. Это является предпочтительным у систем, у которых сопротивление в направлении сгиба и распрямления может быть выставлено независимо друг от друга. В противном случае может быть поднято сопротивление сгибанию при достижении максимального угла колена, при отрыве стопы от земли и/или при начальном контакте, в частности на уровень выше, чем при горизонтальной ходьбе. При этом сопротивление сгибанию может быть повышено таким образом, чтобы полностью было пресечено сгибание коленного сустава.
Сопротивление сгибанию при начальном контакте также может быть сформировано таким образом, чтобы было дозволено контролируемое сгибание колена. Сопротивление сгибанию адаптируется, в частности, таким образом, чтобы степень сгибания контролировалась, и ограничивался максимальный угол сгибания путем повышения сопротивления сгибанию. Сгибом колена можно управлять напрямую с помощью измеренного угла колена или с помощью измеренной ориентации нижней части в пространстве, поэтому наклон вперед нижней части достигает определенной величины или не превышает ее. Уровень сопротивления и размер допустимого сгибания колена также могут зависеть от преодолеваемой разницы высот, скорости ходьбы, длины шага и/или характеристики точки приложения силы на стопе во время перекатывания, поэтому для каждой ситуации достигаются максимальная мера надежности и поддержки.
Далее более подробно разъясняются примеры исполнения с помощью прилагаемых фигур. Показано:
Фигура 1 - схематичное изображение протеза ноги;
Фигура 2 - изображение различных фаз и ситуаций при преодолении разницы высот;
Фигура 3 - изображение надетого протеза с углами;
Фигура 4 - последовательность ходьбы в гору;
Фигура 5 - последовательность преодоления ступеньки;
Фигура 6 - траектории оси сустава лодыжки, оси коленного сустава и trochanter major при ходьбе по ровной местности;
Фигура 7 - траектории оси сустава лодыжки, оси коленного сустава и trochanter major при ходьбе при ходьбе в гору;
Фигуры 8а и 8b - изображения разницы высот;
Фигура 9 - изображения различных ситуаций при наступании;
Фигура 10 - зависимость угла колена от разницы высот при ходьбе в гору;
Фигура 11 - зависимость угла колена от разницы высот при преодолении ступеньки;
Фигура 12 - характеристики угла колена для различных разниц высот за относительное время;
Фигура 13 - характеристику ориентации бедра за цикл шага;
Фигура 14 - отношение ориентации бедра по отношению к горизонтальному пути бедра;
Фигура 15 - возможную вспомогательную величину для оценки высоты шага;
Фигура 16 - характеристику KA угла колена в ° за цикл шага;
Фигура 17 - различные характеристики управления разгибанием в опорной фазе;
Фигура 18 - две различные характеристики угла колена за фазы цикла ходьбы;
Фигура 19 - характеристику сопротивления при пассивном управлении;
Фигура 20 - вариант фигуры 19;
Фигура 21 - характеристику угла голени по отношению к углу бедра;
Фигура 22 - характеристику угла колена по отношению к углу бедра;
Фигура 23 - определение хорд ноги.
Фигура 1 показывает схематичное изображение искусственного коленного сустава 1 при использовании на протезе ноги, альтернативно использованию на протезе ноги соответственно выполненный коленный сустав может быть установлен также в ортезе или экзоскелете. Тогда вместо замены натурального сустава соответствующий искусственный коленный сустав располагают медиально или латерально на натуральном суставе. На изображенном примере исполнения искусственный коленный сустав 1 выполнен в форме коленного сустава протеза с верхней частью 10 с антериорной, или расположенной в направлении ходьбы, или передней частью 11 и задней частью 12, противоположной передней части 11. На верхней части 10 размещена с возможностью поворота вокруг поворотной оси 15 нижняя часть 20. Также нижняя часть 20 имеет антериорную сторону 21 или переднюю сторону и заднюю сторону 22. На изображенном примере исполнения коленный сустав 1 выполнен как моноцентрический коленный сустав, также, в принципе, возможно управлять полицентрическим коленным суставом. На дистальном конце нижней части 20 расположен отдел 30 стопы, который может быть соединен либо как жесткий отдел 30 стопы с неподвижным голеностопом или же поворотной осью 35 с нижней частью, чтобы сделать возможным характер движения, приближенный к природному характеру движения.
Между задней стороной 12 верхней части 10 и задней стороной 22 нижней части 20 измеряют угол KA колена. Угол KA колена может быть измерен напрямую датчиком 25 угла колена, который может быть расположен в области поворотной оси 15. На верхней части 10 расположен инерциальный угловой датчик 51, измеряющий пространственное положение верхней части 10, например, по отношению к постоянному направлению силы, например, гравитационной силы G, указывающей вертикально вниз. На нижней части 20 также расположен инерциальный угловой датчик 52, чтобы определять пространственное положение нижней части во время использования протеза ноги.
Дополнительно к инерциальному угловому датчику 53 на нижней части 20 или на отделе 30 стопы может быть расположен силовой датчик или датчик 54 моментов, при котором может быть определена действующая на нижнюю часть 20 аксиальная сила FA.
Между верхней частью 10 и нижней частью 20 расположен исполнительный механизм 40, чтобы воздействовать на движение смещения нижней части 20 относительно верхней части 10. Исполнительный механизм 40 может быть выполнен как пассивный амортизатор, как привод или как так называемый полуактивный исполнительный механизм 40, которым возможно накапливать энергию движения и в более поздний момент времени целенаправленно снова выдавать, чтобы тормозить или способствовать движениям. Исполнительный механизм 40 может быть выполнен как линейный или вращательный исполнительный механизм. Исполнительный механизм 40 соединен с управляющим устройством 60, например, кабелем или беспроводным соединением, которое, в свою очередь, соединено, по меньшей мере, с одним из датчиков 25, 51, 52, 53, 54. Управляющее устройство 60 обрабатывает переданные датчиками сигналы в электронном виде процессорами, вычислительными блоками или компьютерами. Оно имеет электрическое энергоснабжение, а также, по меньшей мере, блок памяти, в котором запоминаются программы и данные и в котором имеется оперативная память для обработки данных. После обработки данных от датчиков происходит выдача активирующей или деактивирующей команды, которой активируется или деактивируется исполнительный механизм. С помощью активации исполнительного механизма 40 может быть открыт или закрыт клапан, чтобы изменять характер амортизации.
На верхней части 10 протезного коленного сустава 1 укреплена гильза протеза, служащая для размещения культи бедра. Через культю бедра протез ноги соединен с тазобедренным суставом, на передней стороне верхней части 10 измеряется угол HA бедра, который нанесен на передней стороне 11 между вертикальной линией через тазобедренный сустав и продольную протяженность верхней части 10 и соединительной линией между тазобедренным суставом и осью 15 коленного сустава. Если культя бедра поднимается и тазобедренный сустав сгибается, то уменьшается угол HA бедра, например, когда садятся. Наоборот, угол HA бедра увеличивается при разгибании, например, при вставании или аналогичных характерах движения.
Во время цикла ходьбы при горизонтальной ходьбе отдел 30 стопы сначала ставится пяткой, первый контакт пятки или части пятки отдела 30 стопы называют Heel Strike. Затем происходит подошвенное сгибание, пока отдел 30 стопы полностью не ляжет на пол, как правило, при этом продольная протяженность нижней части 10 находится позади вертикали, проходящей через ось 35 сустава лодыжки. Во время горизонтальной ходьбы центр тяжести тела перемещается вперед, нижняя часть 20 поворачивается вперед, угол AA лодыжки уменьшается, и происходит возрастающее нагружение передней части стопы. Вектор реактивной силы пола перемещается от пятки вперед вплоть до передней части стопы. К концу опорной фазы происходит отрыв пальцев ноги или так называемое Toe-off, затем следует фаза переноса, в которой отдел 30 стопы при горизонтальной ходьбе с уменьшением угла KA колена перемещается за центр тяжести или тазобедренный сустав ипсилатеральной стороны, чтобы затем после достижения минимального угла KA колена повернуться вперед, чтобы затем снова достичь пяточного контакта, как привило, с максимально распрямленным коленным суставом 1. Таким образом, точка PF приложения силы перемещается во время опорной фазы от пятки до передней части стопы и схематично изображена на фигуре 1.
Горизонтальная ходьба отличается от ходьбы в гору, ходьбы по лестнице или иного преодоления разницы высот. Человеческая походка, по существу, определяется скоординированным движением обеих ног. Для выполнения шага, например, опорная нога должна принимать на себя перемещение центра тяжести тела и производить продвижение вперед, в то время как переносимая нога осуществляет размещение контрлатеральной стопы таким образом, чтобы удерживать баланс, и чтобы был возможным эффективный перенос веса. Таким образом, движение обеих сторон или обеих ног функционально связано и может наблюдаться при самых разных перемещениях. Путем моделирования воссоздается функциональная связь движений, и функциональная связь как компонентов ипсилатеральной стороны, так и контрлатеральной стороны может быть использована для того, чтобы, при определенных обстоятельствах, определить отсутствующую информацию об отдельных сегментах по характеристике или состояниям других сегментов. Способ предусматривает, чтобы использовать связь соответствующих сегментов экипированной, ипсилатеральной стороны для воспроизведения движения ноги, соответственно, управления движением ноги и использования применительно к распознанию намерения, а также для вывода заданных характеристик и целевых величин. Изобретение предусматривает без сенсорной техники на контрлатеральной стороне анализ движения и намеренного движения и производство управления на основе этой оценки. В то время как при билатеральных экипировках возможно получить движение соответственно контрлатеральной стороны с помощью находящихся на протезе, ортезе или экзоскелете датчиков или также через биосигналы, такие как мускульные активности или подобные, такой возможности при унилатеральных экипировках не предоставляется. Здесь дополнительные датчики следовало бы располагать на не экипированной, контрлатеральной стороне, из-за чего общая система стала бы существенно сложнее. Поэтому предусмотрено определять недостающие величины из имеющихся величин измерений ипсилатеральной стороны с помощью модели, чтобы, таким образом, отказаться от оснащения аппаратурой контрлатеральной стороны. Также одними только датчиками на ипсилатеральной стороне можно получить информацию о движении контрлатеральной ноги в ее опорной фазе, а именно, о поступательном движении колена или бедра без необходимости точного подсчета этих величин контрлатеральной стороны. Сенсорами в ортопедическом устройстве, которое вмещает искусственный коленный сустав, регистрируются состояния ортопедического устройства экипированной, ипсилатеральной стороны, дополнительно из этих значений от датчиков выводят отдельные величины контрлатеральной стороны. Из данных измерений с помощью модели оценивают двигательные величины контрлатеральной стороны. В случае механической модели граничные условия и связанные условия могут зависеть от соответствующей ситуации ходьбы. Для управления исполнительными механизмами привлекаются как измеренные данные, то есть значения от датчиков, так и оценочные величины, и используются для активации или деактивации исполнительного механизма.
Ипсилатеральное движение ноги должно быть определено технически в достаточной мере, для этого для распространяющегося на колено ортопедического устройства достаточно, например, инерциального углового датчика 52 на нижней части, регистрирующего абсолютный угол и горизонтальные ускорения, а также углового датчика 25 для регистрации угла KA колена между верхней частью 10 и нижней частью 20. Чтобы оценить, например, контрлатеральный угол ноги, регистрируется ипсилатеральное движение ноги, отсюда вычисляется перенос бедра и из переноса бедра делается вывод о контрлатеральном движении ноги. Для определения поступательного движения бедра привлекается поступательное движение точки на экипированной стороне, то есть, на ортопедическом устройстве, например, движение коленной оси. Поступательное движение, например, коленной оси определяется, в частности, двойным интегрированием измеренных линейных ускорений с пригодными начальными условиями. Далее с помощью абсолютных углов и относительных углов прослеживается кинематическая цепочка вплоть до бедра. Начальные условия интегрирования могут быть определены с помощью кинематической модели, при этом начало интегрирования предпочтительно находится в поздней опорной фазе. Точка переката отдела стопы, также называемая center of rotation (COR), может быть определена как функция нагрузки и положения и включаться в расчет. Необходимые для расчета сегментные длины измеряются и заносятся в систему или делаются предположения, основанные на статистических величинах. Поскольку, в частности, протезные экипировки - это зачастую штучные изделия, то отдельные сегментные длины известны, поскольку они должны быть измерены для выбора компонентов при составлении протезной системы. Альтернативно сегментные длины вычисляются с достаточной точностью по антропометрическим моделям из характеристических длин, таких как, например, мерка колено-пол или особенностей ампутации, таких как высота ампутации, с помощью масштабирования. Таким образом, из измеренного ускорения жестко связанной точки ортопедической системы, например, положения поворотной оси, путем двойного интегрирования определяется траектория этой точки. Затем по кинематической цепочке определяется траектория бедра как функция относительных степеней свободы и сегментных длин. Именно поступательное движение бедра является хорошей мерой, чтобы оценить намеренное движение, в частности, горизонтальная компонента движения бедра представляет собой часть перемещения вперед, которое производится через опорную ногу. На основе координации движения переносимой ноги и движения опорной ноги отнесение ипсилатерального движения ноги к переносу бедра позволяет классифицировать движения и управление характеристикой протеза. Для распознания, какое движение будет выполняться или предполагается к выполнению, пригодна, в частности, комбинация из ориентации верхней части и переноса бедра или переноса коленной оси и переноса бедра, поскольку эти величины полностью определяются с помощью датчиков в ортопедическом устройстве.
Чтобы иметь возможность оценить угол ноги контрлатеральной стороны, при этом угол ноги измеряется между тазобедренным суставом и точкой наступания при Heel Strike по отношению к направлению гравитации, то делаются два предположения, а именно, что контрлатеральная стопа находится в контакте с полом и, таким образом, относительное движение между стопой и землей равно 0, и, что, по меньшей мере, в момент времени в фазе двойной опоры, то есть, когда обе стопы или оба отдела стопы находятся на земле, может быть определен инерциальный угол ноги контрлатеральной стороны. Для этого было бы уместно предположить, что угол ноги контрлатеральной стороны соответствует отрицательному углу ноги протезированной стороны. Исходя из этого начального условия, может быть рассчитано изменение положения контрлатерального угла ноги по тригонометрической функции из сегментных длин и относительного переноса бедра. Если соотносят контрлатеральный угол ноги в ее опорной фазе и ориентацию ипсилатеральной верхней части в пространстве в ее фазе переноса, то отношение может дать заключение о том, хотел ли пользователь экипированной стороной подниматься в гор, хотел ли подниматься по лестнице или намеревается преодолеть разницу ΔH высот при ходьбе. Типичным для такого намеренной походки является сильный обратный наклон угла ипсилатеральной верхней части в середине фазы переноса при сравнительно малой подаче вперед контрлатеральной стороны в опорной фазе. Выражаясь иначе, контрлатеральная сторона остается почти вертикальной, это значит, что поступательное движение бедра оказывается малым, в то время как верхняя часть или бедро сильно поднимается и сгибается.
Если искусственный коленный сустав 1 при ходьбе в гору в конце фазы переноса останавливается в согнутом положении, то мера такого пред-сгибания может быть определена таким образом, чтобы ипсилатеральный и контрлатеральный угол ноги при контакте экипированной стороны с землей находились в гармоничном соотношении друг с другом. Тогда сопротивления сгибанию и распрямлению в форме заданных значений исполнительного механизма 40 выставляются в ортопедическом устройстве в фазе переноса таким образом, чтобы устанавливалось гармоничное отношение между углом ноги контрлатеральной стороны в опорной фазе и углом ноги ипсилатеральной стороны в фазе переноса. Заданные значения исполнительного механизма 40 и, таким образом, также сопротивления сгибанию и сопротивления распрямлению выставляются таким образом, чтобы максимально доступный угол KAmax колена регулировался в зависимости от определенной или оцененной разницы ΔH высот отдела стопы ипсилатеральной стороны, причем задана разница ΔH высот до стопы или отдела стопы контрлатеральной стороны пациента.
Если распознается ходьба в гору, ходьба по лестнице или преодоление препятствия с разницей ΔH высот, то ограничивается максимальное распрямление нижней части 20 относительно верхней части 10, поэтому уменьшается максимально доступный угол KAmax колена. Нижняя часть 20 при характерном угле нижней части 20 тормозится. На фигуре 2 такое управление поясняется с помощью трех состояний ортопедического устройства. Если бы нижняя часть 20 при преодолении разницы ΔH высот была бы максимально разогнутой, неизмененной по сравнению с горизонтальной ходьбой, поэтому доступный угол KAmax колена составлял бы почти 180°, то отдел 30̕ стопы ставился бы очень далеко впереди и с большим углом подошвы, и пациент должен был бы поворачивать бедро вокруг точки наступания по всей длине хорды ноги, чтобы привело бы к не физиологичному характеру движения. Согласно изобретению, напротив, предусмотрено, чтобы разгибание нижней части 20 при характерном максимальном угле колена, соответственно, при характерной ориентации нижней части, которая, например, может быть распознана с помощью инерциального углового датчика 52, еще до достижения максимального разгибания останавливалось, поэтому отдел 30'' стопы в конце разгибающего движения находится над выступом или ступенькой, или в конце движения определенной или оцененной разницы ΔH высот. Следом за этим в следующем ходе движения бедро или верхняя часть 10 опускается, при этом ориентация нижней части 20 предпочтительно удерживается постоянной, то есть пространственное положение нижней части 20 не меняется до тех пор, пока отдел 30''' стопы не коснется земли. Это может быть распознано, например, с помощью возникновения аксиальной силы аксиальным силовым датчиком 54. Если распознается такая аксиальная сила FA, то следует исходить из того, что фаза переноса окончена, и для преодоления разницы ΔH высот увеличивается как угол HA бедра, так и увеличивается угол KA колена, по меньшей мере, не уменьшается, поэтому на основе изменяемого выставления угла колена и пред-сгибания при наступании укорачивается эффективная длина хорды ноги, и для преодоления разницы ΔH высот необходимо меньше затрачивать энергии.
Чем больше преодолеваемая разница ΔH высот, что определяется, например, с помощью уменьшенной подачи вперед на контрлатеральной стороне или измеренного максимального пространственного положения верхней части 10, уменьшается максимально доступный угол KAmax колена, это означает, что пред-сгибание увеличивается, и предварительно перемещается разгибательный упор. Предварительное перемещение разгибательного упора может производиться с помощью регулирования мотором механического упора или с помощью пригодного открывания и закрывания клапанов в гидравлическом или пневматическом управлении внутри исполнительного механизма 40.
Вертикальный ход коленной оси, то есть разница высот противоположно направлению G гравитации, может быть рассчитан из абсолютного угла верхней части 10, когда вертикальный путь бедра известен или задан в качестве оценки. Вертикальный ход отдела стопы может быть вычислен или оценен из комбинации ориентации верхней части 10 в пространстве с относительным углом или углом KA колена, который определяем датчиком 25 угла колена. Датчик 25 угла колена позволяет определить измеренный угол KAD колена и служит, при наличии данных датчиков об угле бедра, в комбинации с сегментными длинами для вычисления разницы ΔH высот. Доступный угол KAmax колена выставляется в фазе переноса ипсилатеральной ноги и сохраняется вплоть до достижения предварительно установленного пространственного положения нижней части и/или верхней части. Также может сохраняться выставление применительно к доступному углу КАmax колена при контроле угла АА сустава лодыжки вплоть до достижения предварительно установленного угла АА сустава лодыжки, который, например, задан как такой угол, который устанавливается после поднятия отдела 30 стопы в конце опорной фазы, когда отдел 30 стопы находится в нейтральном положении. Если затем отдел 30 стопы ставится на землю, то изменяется угол АА сустава лодыжки, что является указанием на то, что теперь возможно изменение максимально доступного угла КАmax колена. Альтернативно может быть определено с помощью определения силовой характеристики вдоль продольной протяженности отдела стопы положение точки приложения силы, и в зависимости от этого положения соответственно можно управлять исполнительным механизмом 40, чтобы вплоть до определенного момента времени заблокировать последующее разгибание и только затем сделать возможным распрямление коленного сустава 1. Альтернативно или в дополнение может быть задан с помощью элемента выдержки времени определенный промежуток времени, который ограничивает максимальное разгибание.
Достижение минимального угла HA бедра может быть распознано путем наблюдения за ориентировкой верхней части 10 в пространстве. Если бедро или верхняя часть 10 максимально согнуто, то продольная протяженность верхней части 10 находится в максимальном наклоне относительно направления G гравитации. Если затем верхняя часть 10 поворачивается вниз вокруг тазобедренного сустава, а продольная протяженность верхней части 10 приближается к направлению G гравитации, то достигнут минимальный угол HA бедра, и произошла смена направления движения. После обнаружения смены направления движения может удерживаться постоянным максимальный угол колена или, например, ориентация нижней части 20 в пространстве, вплоть до того, как будет определено наступание отделом 30 стопы на землю, например, путем обнаружения аксиальной силы FA или с помощью изменения угла KA сустава лодыжки. В то время как с помощью изменения сопротивления разгибанию выставляется максимально доступный угол КАmax колена, чтобы отделом 30 стопы наступить в правильной ориентации при согнутой ноге, для следующей последовательности движений является предпочтительным, когда сопротивление сгибанию в фазе переноса ипсилатеральной стороны после смены направления движения нижней части 20 в вертикальном направлении, то есть при опускании нижней части, удерживалось на высоком уровне, на уровне, который выше, чем сопротивление сгибанию при горизонтальной ходьбе, чтобы облегчить поднятие туловища пользователя ортопедического приспособления при ходьбе в гору, ходьбе по лестнице или подобном, и избежать нежелательного сгибания и наклона коленного сустава 1.
На фигуре 3 изображены соответствующие углы и ориентации в пространстве, а также соответствующие базовые величины для пояснения соответствующих связей друг с другом. Направление земного притяжения или направление гравитации обозначено стрелкой g, ориентация земного притяжения соответствует, в основном, вертикальной ориентации. Ориентация верхней части 10 в пространстве определена углом φT, ориентация нижней части 20 в пространстве изображена, соответственно измерена с помощью угла φS от направления g гравитации. Угол HA бедра измеряется между продольной ориентацией корпуса и продольной ориентацией верхней части 10 на передней в g-направлении стороне, угол КА колена измеряется между продольной протяженностью верхней части 10 и продольной протяженностью нижней части 20 вокруг коленной оси 15.
Фигура 4 - это изображение последовательности движений при ходьбе в гору. Последовательность движений начинается при t0 для экипированной ноги с верхней частью 10, нижней частью 20 и протезом 30 стопы, при которой протез 30 стопы как раз еще касается земли и находится в конце опорной фазы. Не экипированная, контрлатеральная нога полностью наступает на землю и слегка согнута. К моменту времени t1 экипированная нога поднята и находится в максимально согнутом положении с минимальным углом КА колена. К моменту времени t2 отдел 30 стопы движется в направлении на землю и опускается, нижняя часть 20 находится в конце разгибательного движения в фазе переноса и тормозится, например, путем активации тормоза, повышения степени амортизации или регулировкой разгибательного упора, которым изменяется доступный угол колена. К моменту времени t3 отдел 30 стопы экипированной ноги наступает на землю согнутым коленным суставом 1, контрлатеральная, не экипированная нога разгружается и перемещается вперед. Одновременно производится разгибание в опорной фазе для экипированной ноги, что в этой фазе завершается к моменту времени t4. Затем центр тяжести тела перемещается вперед через коленную поворотную ось 15 в направлении ходьбы. Нижняя часть 20 совершает при разогнутом коленном суставе поворот вперед вокруг находящейся со стороны земли точки опоры или точки поворота и располагается на изображенном примере исполнения в области мыска протеза 30 стопы. Затем начинается заново цикл движения.
Фигура 5 показывает соответствующую последовательность движений при преодолении ступеньки, причем при преодолении ступеньки показан следующий этап движения, который на фигуре 5 обозначен как t4, и в последовательности фигуры 4 находится между промежутками времени t3 и t4. К моменту t4 времени на фигуре 5 не экипированная, контрлатеральная нога поднята и находится на высоте прямо над преодолеваемой ступенькой, а колено контрлатеральной стороны еще не перемещено спереди коленной оси 15 протезного коленного сустава 1.
На фигуре 6 нарисованы траектории сустава 4 лодыжки на высоте оси 35 сустава лодыжки, таковые для колена К на высоте оси 15 коленного сустава, а также для вертела Tr бедренной кости как выступающей точки бедренной кости в области тазобедренного сустава. Между показанными соответственно непрерывными линиями траекториями обозначены ориентации верхней части 10 и нижней части 20 в сагиттальной плоскости. Траектории, как и ориентации отражают горизонтальную ходьбу, направления стрелок показывают движение вперед. К началу фазы переноса, при Toe-off TO, сустав А лодыжки слегка поднят, по сравнению с прямым, ненагруженным стоянием. После Toe-off коленный сустав K переносится вперед и слегка поднимается, благодаря чему возникает эффект плетки, при котором сустав А лодыжки поднимается, Trochanter major остается на почти неизменном уровне. При последующем движении вперед коленный сустав K снова поднимается и движется вперед, сустав А лодыжки опережает после примерно 40% цикла ходьбы коленный сустав, пока коленный сустав А не будет находиться в максимально разогнутом положении, что имеет место при пяточном контакте или Heel Strike. Эта фаза ходьбы обозначена сплошной линией и ссылочным обозначением IC для начального контакта. Благодаря эластичности стопы ось сустава лодыжки немного опускается, и нога перекатывается по стопе 30 или оси 35 сустава лодыжки в направлении ходьбы вперед, при этом коленный сустав слегка сгибается, поскольку речь идет о сгибании в опорной фазе. Примерно при 70% цикла ходьбы Trochanter major опережает ось сустава лодыжки, и бедро переносится спереди коленного сустава, и начинается движение вперед. Каждая отдельная штриховая линия обозначает десятую часть цикла ходьбы.
Фигура 7 показывает траектории лодыжки А, колена К и Trochanter major Tr при ходьбе в гору, например, по пандусу. По различным траекториям можно увидеть, что для сустава А лодыжки имеет место одна и та же форма траектории, однако она наклонена вперед. Ориентация голени при начальном контакте отлична от таковой при горизонтальной ходьбе, равно как и ориентация нижней части к верхней части, а именно, наклонена в отличие от максимально разогнутого положения при горизонтальной ходьбе. Все траектории заканчиваются на более высоком уровне, чем они начинались, что следует из природы вещей ходьбы в гору.
С помощью фигуры 8 можно определить высоту шага между контрлатеральной, не экипированной ногой и ипсилатеральным отделом 30 стопы экипированной ноги. Например, задается расстояние H1 от земли до характерной точки бедра, например, Trochanter major, на высоте опорной ноги, расстояние H2 - это расстояние между землей и бедром или Trochanter major на опережающей стороне, на изображенном примере экипированной стороне. Тогда разница ΔH высот получается из разницы между H1 и H2. Соответственно определение разницы ΔH высот действительно для ходьбы по пандусу. Фигура 8b показывает определение разницы ΔH* высот, при котором преодоленная высота измеряется от ипсилатеральной к ипсилатеральной, то есть разница высот между поднятием экипированной ноги до следующего наступания, что соответствует разнице высот между Toe-off экипированной ноги и начальным контактом.
На фигуре 9 поясняется различие, которое для пациента означает наступание экипированной ногой с согнутым коленным суставом по сравнению с наступанием ногой с разогнутым коленным суставом, когда нужно преодолеть разницу высот. На левом изображении изображено пред-согнутое наступание, на правом изображении - выпрямленное наступание, при котором угол KA2 колена больше, чем при пред-согнутом наступании с углом KA1 колена. По причине пред-сгибания вышагивание L1 меньше, чем при наступании вытянутой ногой. Центр COM тяжести тела, чтобы достичь продвижения вперед, должен быть перемещен вперед. Для этого должен быть использован рычаг L*1, как расстояние между центром COM тяжести массы и вертикалью из точки наступания, чтобы переместить центр тяжести тела. Чем меньше рычаг L*1, тем меньше усилие, которое пациент должен приложить с помощью мускулатуры бедра и разгибателя бедра. На правом изображении, на котором вышагивание L2 ˃, также существенно больше рычаг L*2, даже у наклоненного вперед пользователя, поэтому требуется значительно большее усилие, чтобы преодолеть разницу высот. При вытянутом наступании, как на правом изображении, разница ΔH высот должна достигаться с помощью большего вышагивания L2 по сравнению с пред-согнутым наступанием. Обычная компенсация происходит путем наклона вперед верхней части тела, благодаря чему производится попытка уменьшить рычаг L* между точкой наступания и центром COM тяжести массы. Кроме этого получается повышенное подошвенное сгибание отстающей опорной ноги, что не видно на изображении.
На фигуре 10 изображена зависимость угла KA колена от разницы ΔH высот или высоты шага. Чем больше высота шага или преодолеваемая разница ΔH высот, тем меньше угол KA колена, в частности, когда ориентация голени при наступании должна быть соответственно одинаковой. На фигуре 11 изображено это соотношение для преодоления ступеньки, на фигуре 10 - при ходьбе в гору на пандусе.
Фигура 12 показывает характеристику угла колена для различных разниц ΔH высот. При ровной ходьбе, при которой ΔH=0, после Toe-off TO1 получается уменьшение угла KA колена до минимального угла колена. Затем стопа переносится вперед, угол KA колена увеличивается до почти полного выпрямления при Heel Strike или начальном контакте IC. Пред-сгибание выставлено, чтобы можно было совершить сгибание при опорной фазе. Сгибание при опорной фазе увеличивается вплоть до момента времени t/T=1,05 и затем уменьшается вплоть до максимального разгибания при t/T=1,4, что соответствует примерно Rollover. Затем в конце опорной фазы совершается пред-сгибание для наступления фазы переноса. При увеличивающейся разнице ΔH высот можно видеть, что пред-сгибание при ударе пяткой или начальном контакте IC растет с разницей ΔH высот; сгибание в опорной фазе при определенных обстоятельствах может уменьшаться с увеличивающейся разницей ΔH высот или блокироваться. Угол KA колена нанесен за безразмерное время с помощью доли цикла ходьбы, деления соответствуют 10% цикла ходьбы.
Фигура 13 показывает характеристику ориентации φT бедра в ° за цикл ходьбы с делением на соответствующую долю цикла ходьбы, нанесенным от первого начального контакта IC или Heel Strike вплоть до второго начального контакта IC2 или Heel Strike. Штрихованная линия показывает характер ориентации φT бедра для ровной ходьбы, непрерывная линия для ходьбы в орку или подъема наверх с ΔH˃0. Для распознания ходьбы в гору можно сделать заключение о разнице ΔH высот из характера ориентации φT бедра из-за большего объема движений или большего поворота в промежутке времени от увеличения сгибания бедра при T1 до T3, что выражается в большем ΔφT1, из более сильного сгибания бедра между T2 до T3 в форме ΔφT2 или через отношение разгибания бедра к сгибанию бедра (  ) или через отношение сгибания к Range of Motion (
) или через отношение сгибания к Range of Motion (  ). Тогда из вычисления или оценки получается соответствующие регулировочные команды от управляющего устройства для адаптации амортизации и/или упоров.
). Тогда из вычисления или оценки получается соответствующие регулировочные команды от управляющего устройства для адаптации амортизации и/или упоров.
Фигура 14 показывает соотношение ориентации φT бедра в виде отношения к горизонтальному пути XH бедра или Trochanter major для различных разниц ΔH высот. При горизонтальной ходьбе с ΔH1 получается сравнительно малый объем движений, при возрастающей разнице ΔH высот получается возрастающее увеличение ориентации φT бедра при укорачивающейся длине шага или при укорачивающемся горизонтальном пути бедра. Из такого соотношения можно вывести, имеет ли место преодоление или ходьба в гору и должно ли быть и насколько предпринята регулировка разгибательного упора или амортизирующих устройств. Тогда регулировка разгибательного упора или амортизирующего устройства может происходить в фазе переноса, например, когда достигается сохраненное в управляющем блоке пороговое значение для этого соотношения.
Фигура 15 иллюстрирует возможную вспомогательную величину для оценки высоты шага или преодолеваемой разницы ΔH высот, а именно, соотношение ориентации φT бедра к горизонтальному пути XH бедра. Растущий наклон K показывает растущую высоту ΔH шага, чем больше высота ΔH шага, тем больше и наклон соотношения ориентации φT бедра к горизонтальному пути XH бедра, например, Trochanter major.
На фигуре 16 показана характеристика KA угла колена в ° за цикл шага, начина с Toe-off TO, с Heel Strike HS или начальным контактом IC при 1 и со вторым Toe-off TO при 1,6. В различных фазах ходьбы управлением сопротивлениями или упорами преследуются различные цели. В области А происходит контролируемое торможение разгибания в фазе переноса или активное выпрямление коленного сустава вплоть до необходимого угла пред-сгибания. В фазе B производится контроль сгибания в опорной фазе, например, сгиб под высоким сопротивлением сгибанию, чтобы ограничить или предотвратить сильное сгибание в опорной фазе. В фазе C происходит воздействие на разгибание в опорной фазе, например, с помощью степеней выпрямления, чтобы можно было повлиять на ход перекатывания и ход распрямления. В фазе D останавливается разгибание в опорной фазе, чтобы предотвратить жесткое упирание в разгибательном упоре, когда произошел перекат, и достигается максимальный угол колена.
Пример использования накопителя энергии, который может быть встроен в активном или полуактивном исполнительном механизме, предусматривает использование накопителя энергии в выбранных фазах ходьбы. Энергия движения может быть сохранена, например, во время разгибания в опорной фазе, то есть во время фаз C и D, в течение этих фаз, в частности, во время торможения в разгибании в опорной фазе, что соответствует фазе D. Для поддержания сгибания в фазе переноса, в частности, непосредственно после начала фазы переноса, накопленная энергия снова отдается. Также возможно, чтобы энергия движения сохранялась во время разгибания в опорной фазе в фазе D, чтобы снова там ее отдать во время разгибания в фазе переноса в фазе A, в частности, во второй половине разгибания в опорной фазе. Таким образом поддерживается конкретное расположение стопы. В основном, также возможно, сохранять энергию движения в других двигательных фазах и снова отдавать в других двигательных фазах. Вся сохраненная энергия движения не должна снова сразу отдаваться, также сохраненные количества энергии могут суммироваться, например, за несколько фаз движения одного шага или за несколько шагов в различных или одинаковых фазах движения.
Фигура 17 показывает различные характеры управления разгибанием в опорной фазе с помощью угла φS голени. Сгибом колена можно управлять таким образом, чтобы при характеристике согласно A бедро или нижняя часть 10 во время колено-разгибательного движения сохраняло почти постоянную ориентацию. Альтернативно согласно характеристике B может допускаться определенная мера поворота вперед нижней части 20 и голени и устанавливаться скорость поворота вперед на заданную величину. Характеристика C предусматривает определенную меру обратного поворота или скорости обратного поворота. Все три варианта управления могут зависеть, при определенных обстоятельствах, от скорости ходьбы, высоты шага, длины шага, а также степени сгибания колена. Угол φS голени показан снова по фазам цикла ходьбы от начального контакта IC вплоть до начала фазы переноса при Toe-off TO.
Фигура 18 показывает две различные характеристики KA угла колена также по фазам цикла ходьбы, причем здесь фаза следует после начального контакта IC с относительно жестким пред-сгибом в 20 градусов. По характеристике согласно непрерывной кривой A блокируется сгиб в опорной фазе, характеристика с прерывистой линией B позволяет дальнейший сгиб в опорной фазе до 30 градусов, однако контролируется мера сгибания в опорной фазе и ограничивается максимальное сгибание колена. Использование обоих вариантов может происходить в зависимости от скорости ходьбы, высоты шага, длины шага, а также характеристики точки приложения силы в отдел стопы.
Фигура 19 показывает возможную характеристику сопротивления при пассивном управлении и при прекращении сгибания в опорной фазе с помощью трех диаграмм. Верхняя диаграмма показывает характеристику KA угла колена, средняя диаграмма сопротивление Rflex сгибанию, а нижняя диаграмма сопротивление Rext разгибанию соответственно за цикл ходьбы от Toe-off 1 до Toe-off 2 с начальным контактом IC или Heel Strike при 1,0. Все три кривые нанесены за безразмерное время с помощью доли цикла ходьбы. Перед начальным контактом IC сопротивление Rflex сгибанию повышается до максимального значения, поэтому при начальном контакте IC отдела стопы имеется максимальное сопротивление сгибанию. Повышение в фазе A имеет место во время выпрямления в фазе переноса, коленный сустав при начальном контакте IC заблокирован. После начального контакта IC в фазе B сопротивление Rflex сгибанию снова уменьшается, например, когда имеет место разгибание в опорной фазе, чтобы затем в конце опорной фазы сделать возможным быстрый спад сопротивления разгибанию к началу фазы переноса. Сопротивление разгибанию в фазе C повышается перед начальным контактом IC во время разгибания в фазе переноса, чтобы остановить коленный сустав при заданном угле KA колена. Полная блокировка разгибательного движения не должна быть. Благодаря увеличивающемуся повышению сопротивления может происходить достаточное уменьшение разгибательного движения, чтобы сустав в достаточной мере остановить. Затем уменьшается сопротивление разгибанию, при определенных обстоятельствах, в зависимости от скорости ходьбы, высоты шага, длины шага, имеющегося сгиба колена, а также от характеристики вектора реактивной силы пола. Затем сопротивление Rext разгибанию контролируемо повышается во время разгибательного движения в опорной фазе, например, путем регулировки на заданные доли выпрямления коленного сустава или в зависимости от угла φS голени. В заключении разгибание в опорной фазе с помощью последующего повышения в фазе F останавливается, чтобы предотвратить жесткий упор в выпрямление, или когда достигнут требуемый угол KA колена.
Фигура 20 соответствует, в основном, фигуре 19, однако показывает другие характеристики как угла KA колена, так и соответствующих сопротивлений в ходе цикла ходьбы. Сопротивление Rflex сгибанию, иначе чем в характеристике фигуры 19, не повышается перед начальным контактом IC до максимального значения, а после максимума сокращается до торможения в разгибании в фазе переноса до меньшего значения, до тех пор, пока после начального контакта IC сопротивление Rflex сгибанию в фазе B повысится, чтобы сделать возможным контролируемое сгибание в опорной фазе. Повышение в фазе B служит тому, чтобы контролировать степени сгиба или масштаб сгибания в опорной фазе. Величина подъема сопротивления Rflex сгибанию зависит от необходимого, максимального угла сгибания. Затем сопротивление сгибанию в фазе C снова уменьшается, аналогично фазе B на фигуре 19. Сопротивление Rext разгибанию регулируется, как поясняется в характеристике фигуры 19.
Фигура 21 показывает характеристику угла φS голени по отношению к углу φT бедра для горизонтальной ходьбы непрерывной линией с разницей ΔH высот, равной 0. Также и здесь обозначены важные точки ходьбы Toe-off TO и начальным контактом IC. Непрерывная линия показывает отношение угла φS голени с углу φT бедра для ходьбы в гору или преодоления препятствия с разницей ΔH высот больше 0. Отметки соответствуют 10 процентам цикла ходьбы. Руководствуясь различными характеристиками кривых можно оценить, насколько большой является преодоленная или преодолеваемая разница ΔH высот. В частности, из характера кривых после 80 процентов цикла ходьбы, то есть после двух штрихов после Toe-off TO или при 0,8 получается для горизонтальной ходьбы с ΔH равной 0 существенно более крутой ходьба, чем для ходьбы в гору или преодоления с разницей ΔH высот больше 0. Для различных разниц ΔH высот могут быть определены или сохранены различные характеристики, которые затем будут иметься в распоряжении управляющего устройства, чтобы иметь возможность предпринимать соответствующую регулировку упоров и сопротивлений для адаптации под соответствующую ситуацию ходьбы.
Фигура 22 показывает отношение угла KA колена к углу φT бедра для горизонтальной ходьбы при ΔH равной 0 прерывистой линией, а для преодоления препятствия или ходьбе в гору с ΔH больше 0 - непрерывной линией. При цикле шага 0,6 при Toe-off получается также в области 0,8 цикла ходьбы значительное различие характеров кривых, с помощью которого затем, руководствуясь сравнительными алгоритмами, может быть оценена разница ΔH высот и предпринята управлением соответствующая адаптация сопротивлений или упоров.
На фигуре 23 предпринято определение хорды ноги ипсилатеральной, экипированной ноги и контрлатеральной, неэкипированной ноги. Хорда ноги идет через точку поворота бедра и образует линию к суставу лодыжки. Как можно видеть из фигуры 23, изменяется длина хорды ноги и ориентация φL хорды ноги при движении, в частности также при различных подъемах. По характеристике изменения длины и/или ориентации хорды ноги могут быть оценены и предсказаны или определены преодолеваемые разницы ΔH высот. Затем отсюда выводятся соответствующие управляющие команды. Указана соответствующая ориентация φLi ипсилатеральной хорды ноги относительно направления G гравитации и φLk контрлатеральной хорды ноги.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ОРТОПЕДИЧЕСКИМ СУСТАВОМ | 2008 |
|
RU2484789C2 |
| СПОСОБ УПРАВЛЕНИЯ ИЗМЕНЕНИЕМ АМОРТИЗАЦИИ У ИСКУССТВЕННОГО СУСТАВА | 2016 |
|
RU2722448C2 |
| СПОСОБ УПРАВЛЕНИЯ ПАССИВНЫМ ПРОТЕЗОМ КОЛЕННОГО СУСТАВА С РЕГУЛИРУЕМОЙ АМОРТИЗАЦИЕЙ | 2007 |
|
RU2404730C2 |
| ОРТОПЕДИЧЕСКИЙ КОЛЕННЫЙ СУСТАВ, А ТАКЖЕ СПОСОБ УПРАВЛЕНИЯ ОРТОПЕДИЧЕСКИМ КОЛЕННЫМ СУСТАВОМ | 2009 |
|
RU2488367C2 |
| СПОСОБ УПРАВЛЕНИЯ АМОРТИЗАЦИЕЙ ФАЗЫ ОСТАНОВКИ ИСКУССТВЕННОГО КОЛЕННОГО СУСТАВА | 2016 |
|
RU2715683C2 |
| Протез бедра | 1986 |
|
SU1351600A1 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ И ЛЕЧЕНИЯ НАРУШЕНИЙ ФУНКЦИИ И ДЕФОРМАЦИЙ ОПОРНО-ДВИГАТЕЛЬНОГО АППАРАТА | 2002 |
|
RU2222307C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ОРТЕЗОМ ИЛИ ПРОТЕЗОМ СУСТАВА | 2010 |
|
RU2533967C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ОРТЕЗОМ ИЛИ ПРОТЕЗОМ СУСТАВА НИЖНЕЙ КОНЕЧНОСТИ | 2010 |
|
RU2572741C2 |
| ПРОТЕЗ БЕДРА | 1992 |
|
RU2043091C1 |
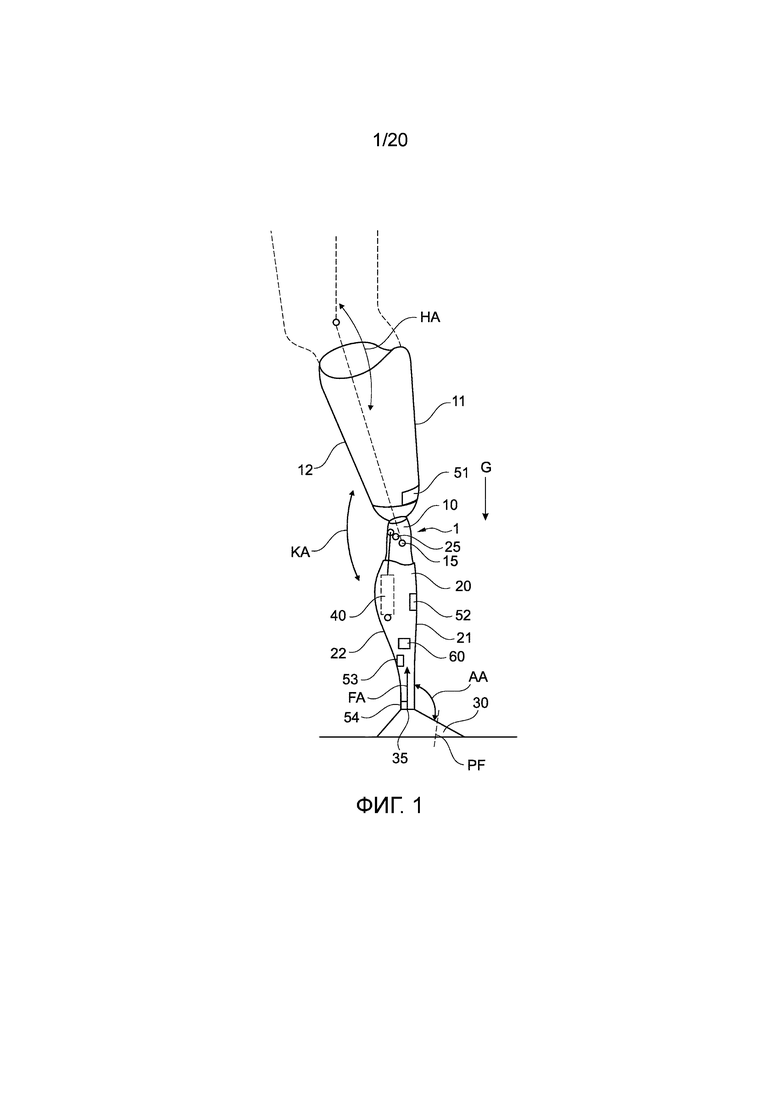
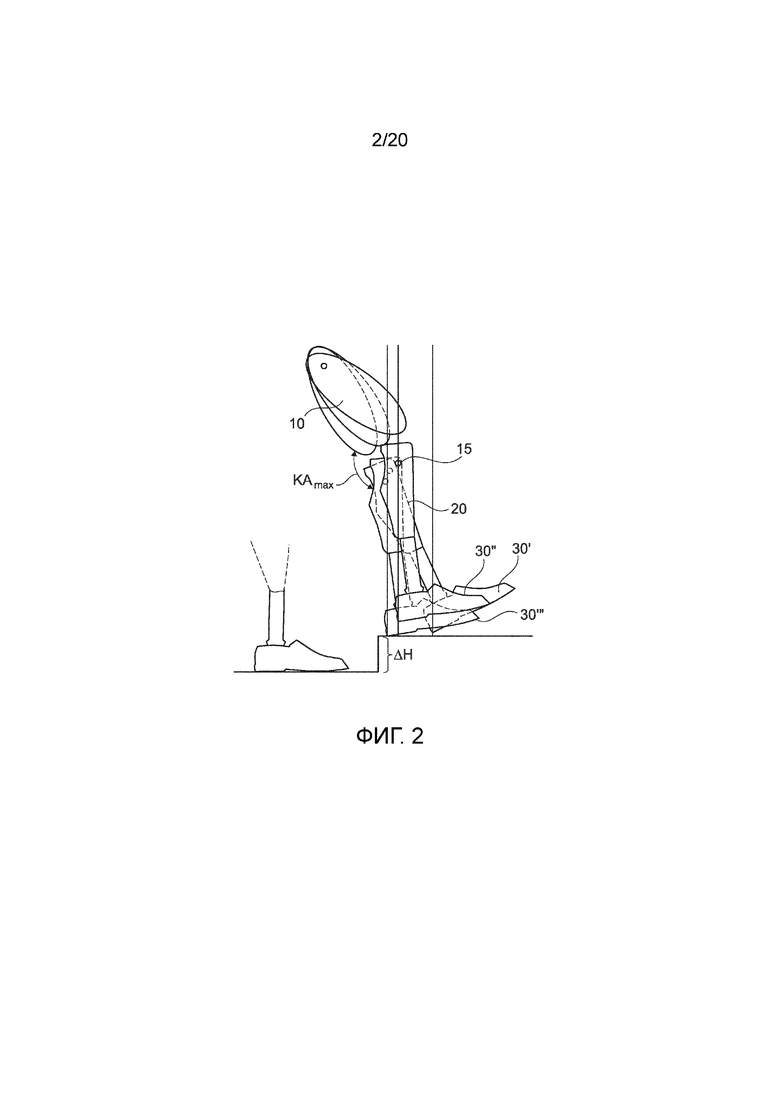
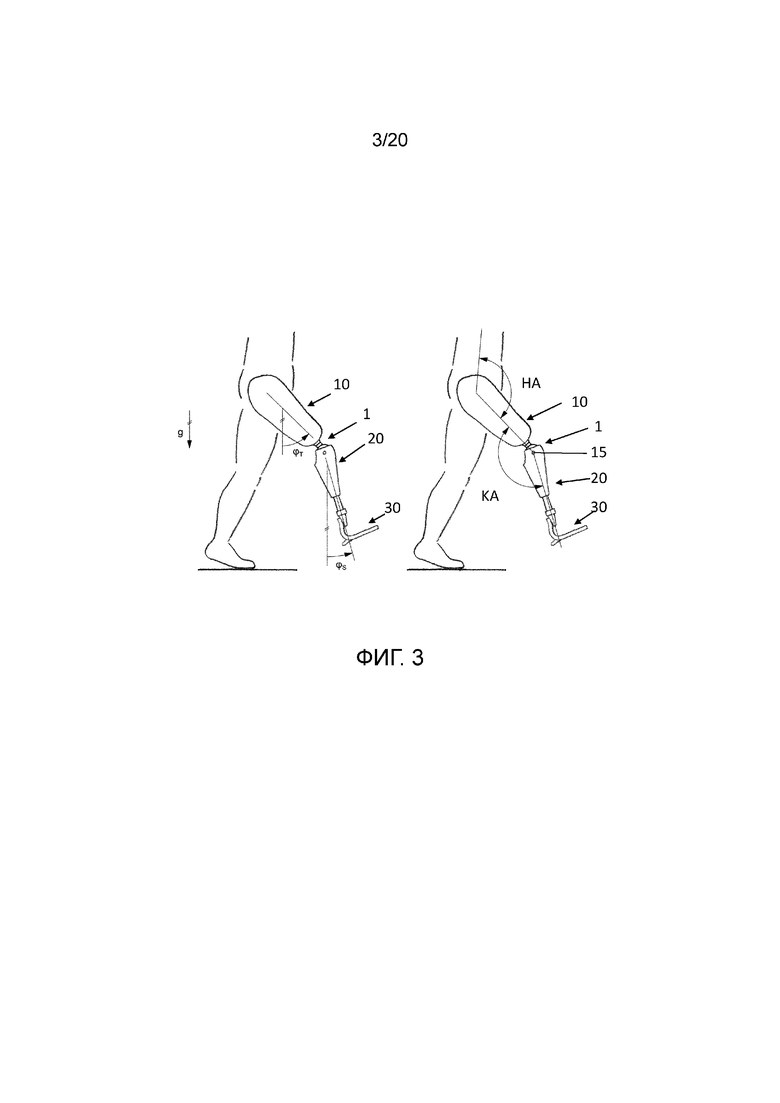
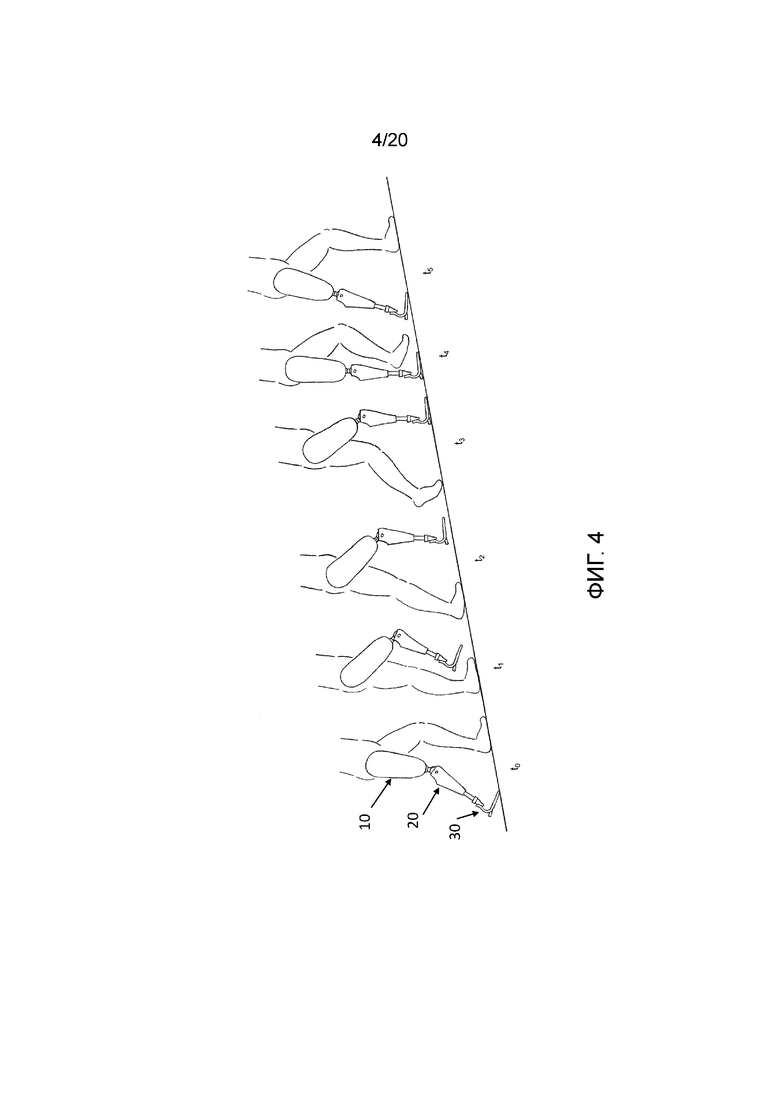
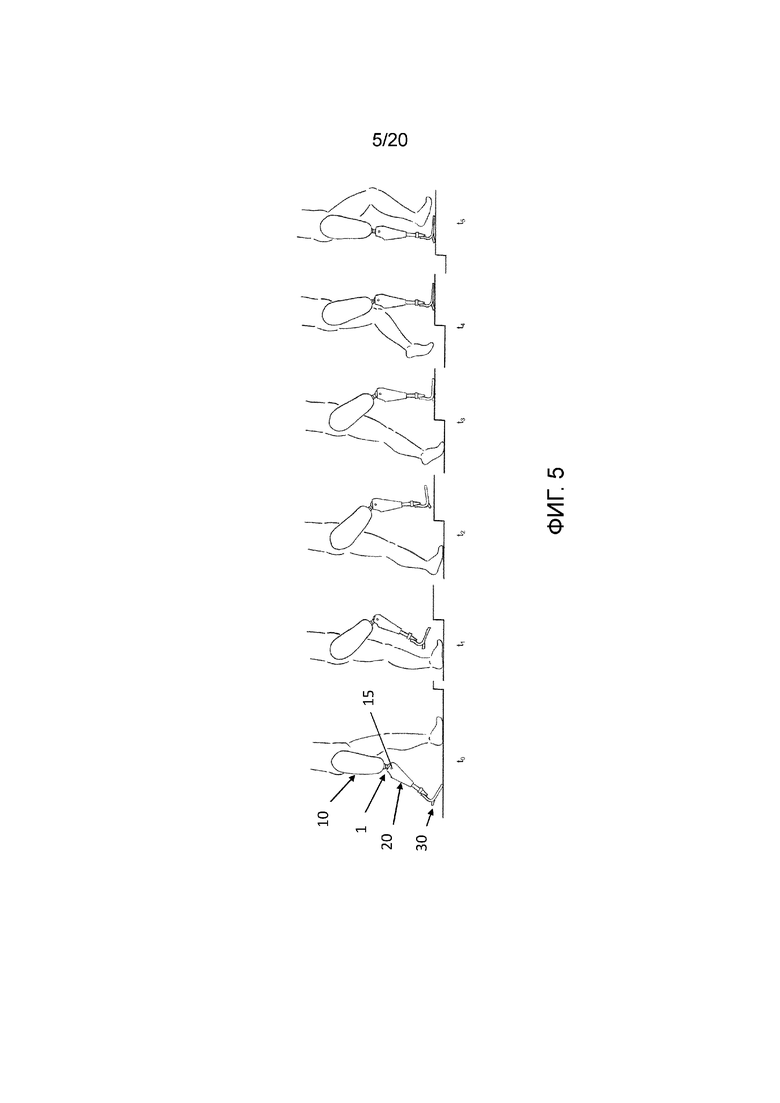
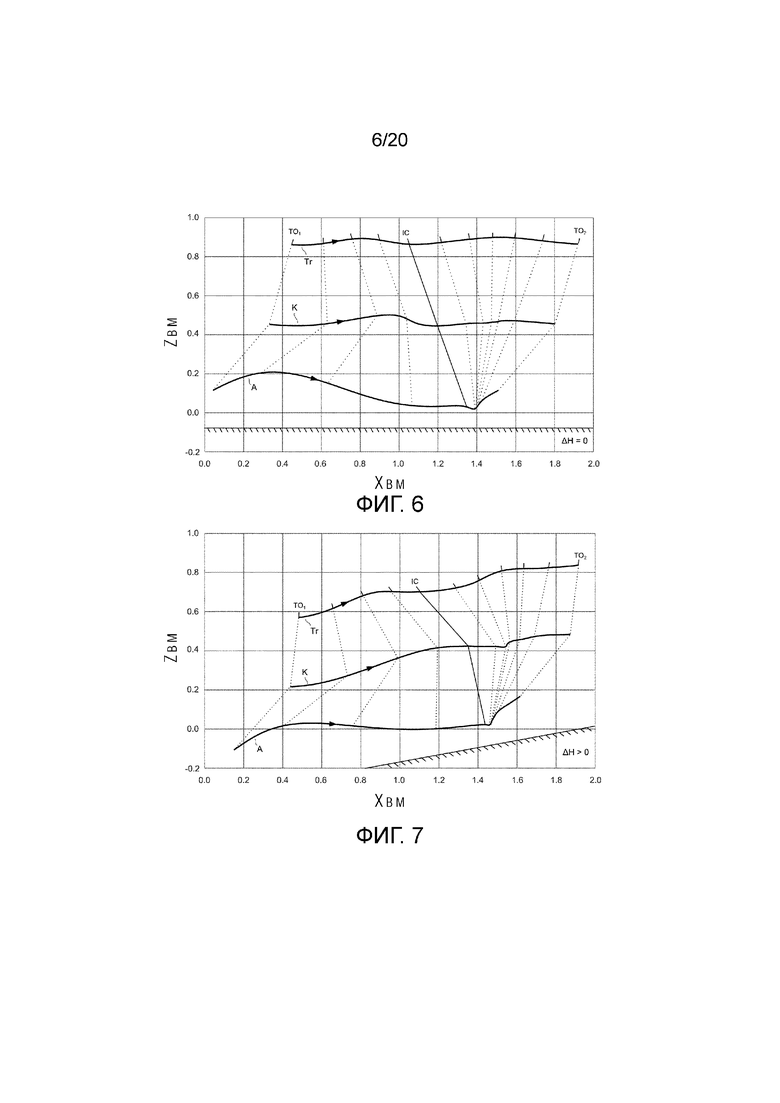
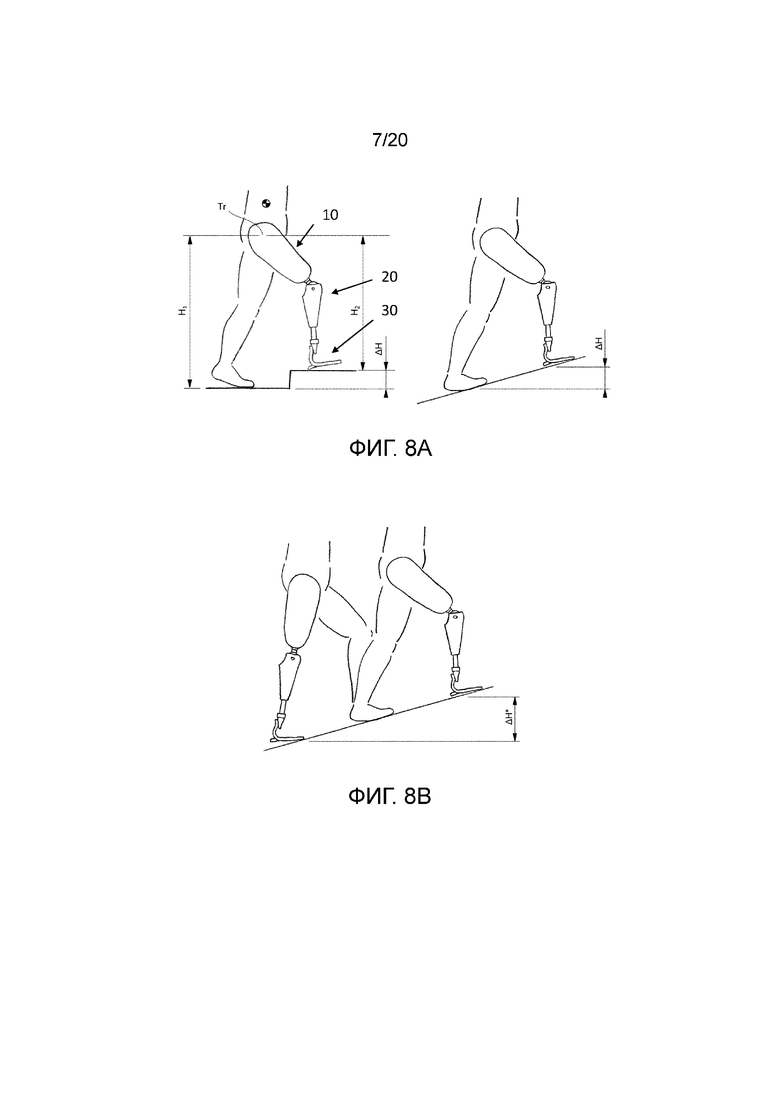
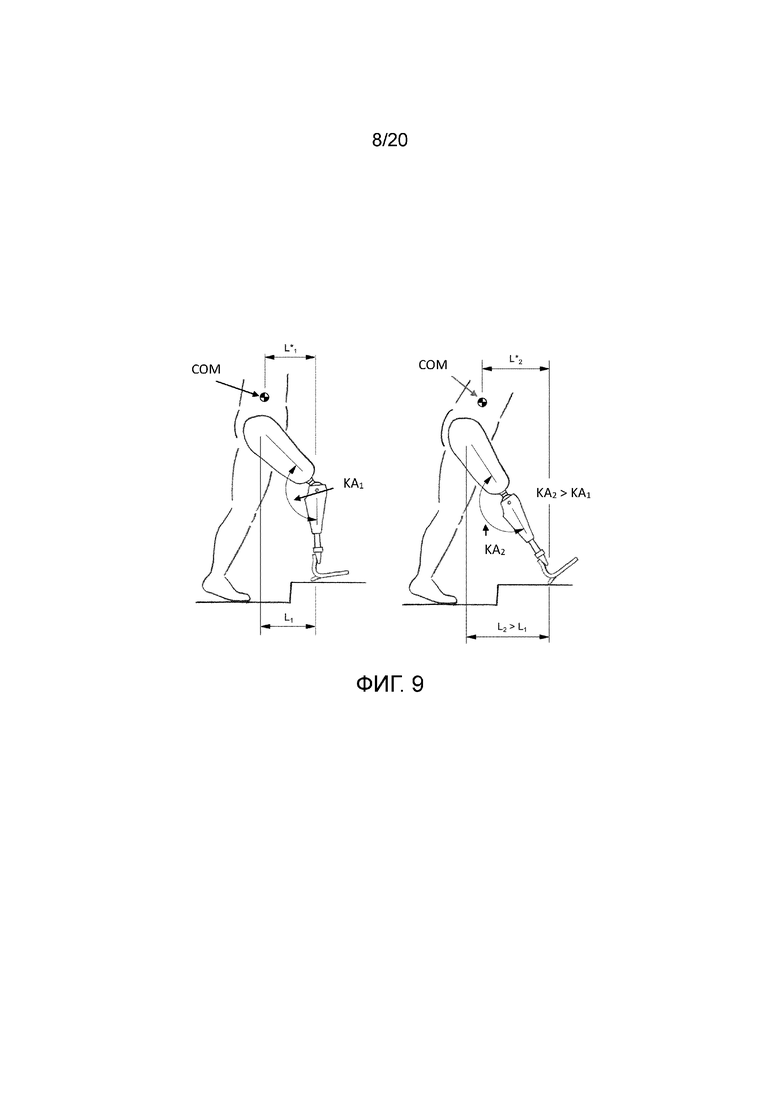
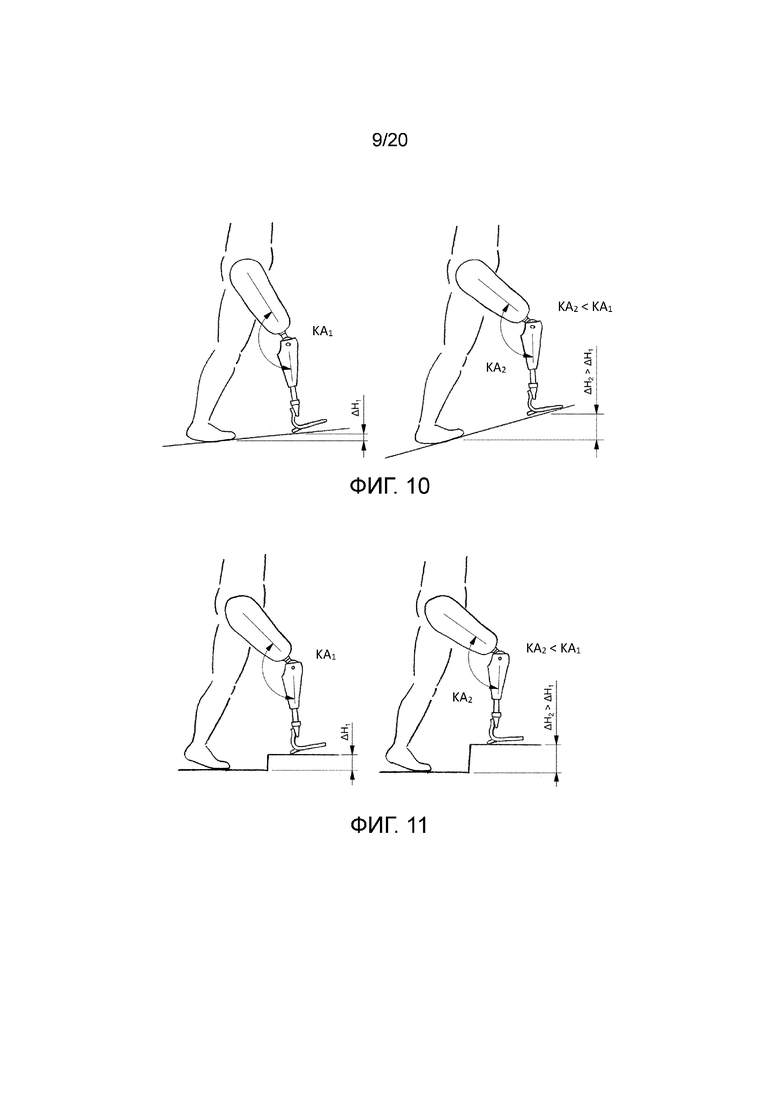
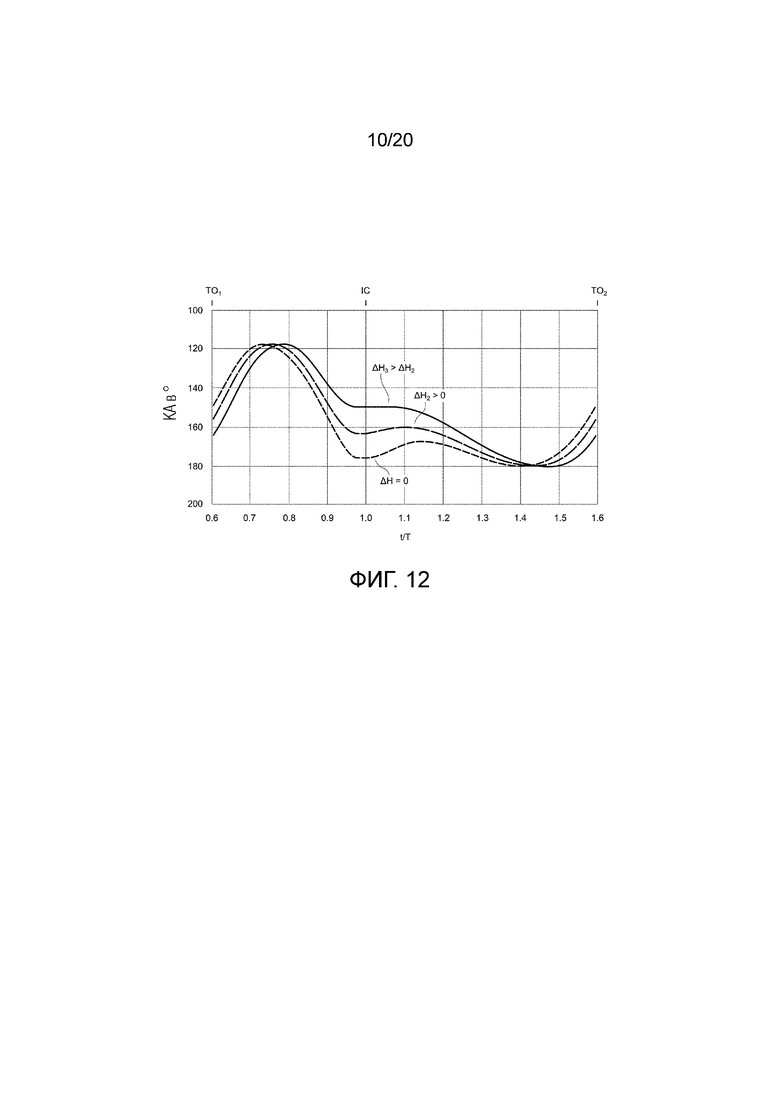
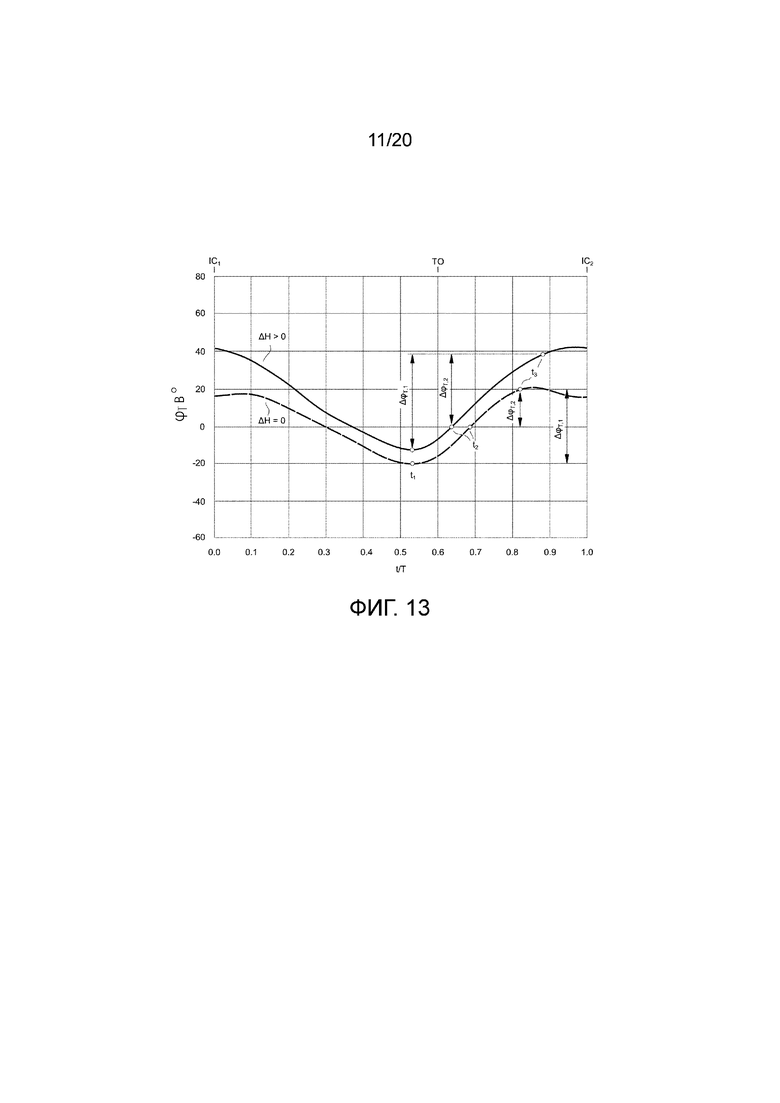
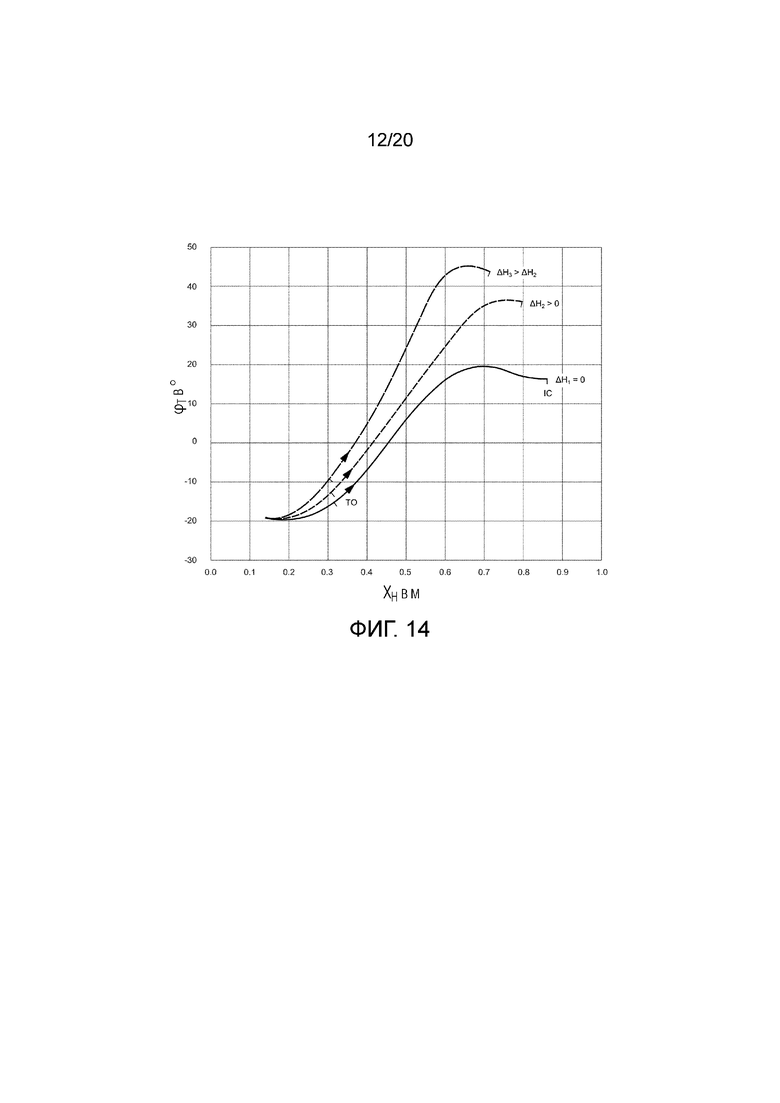
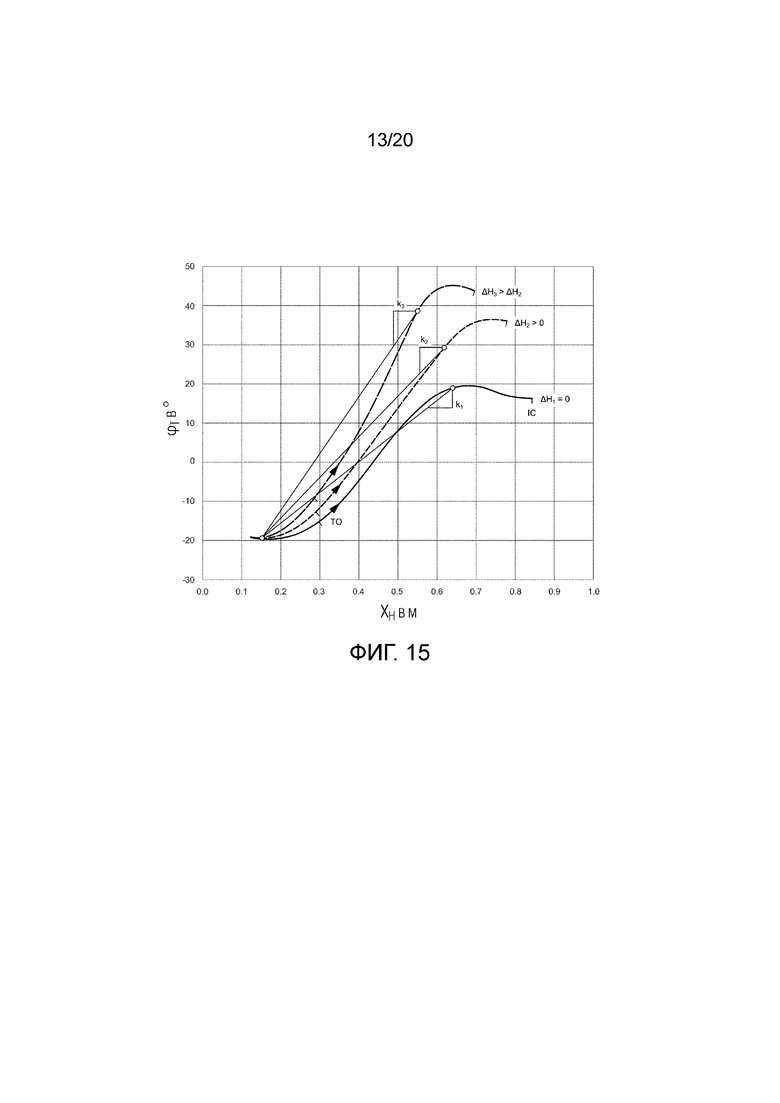
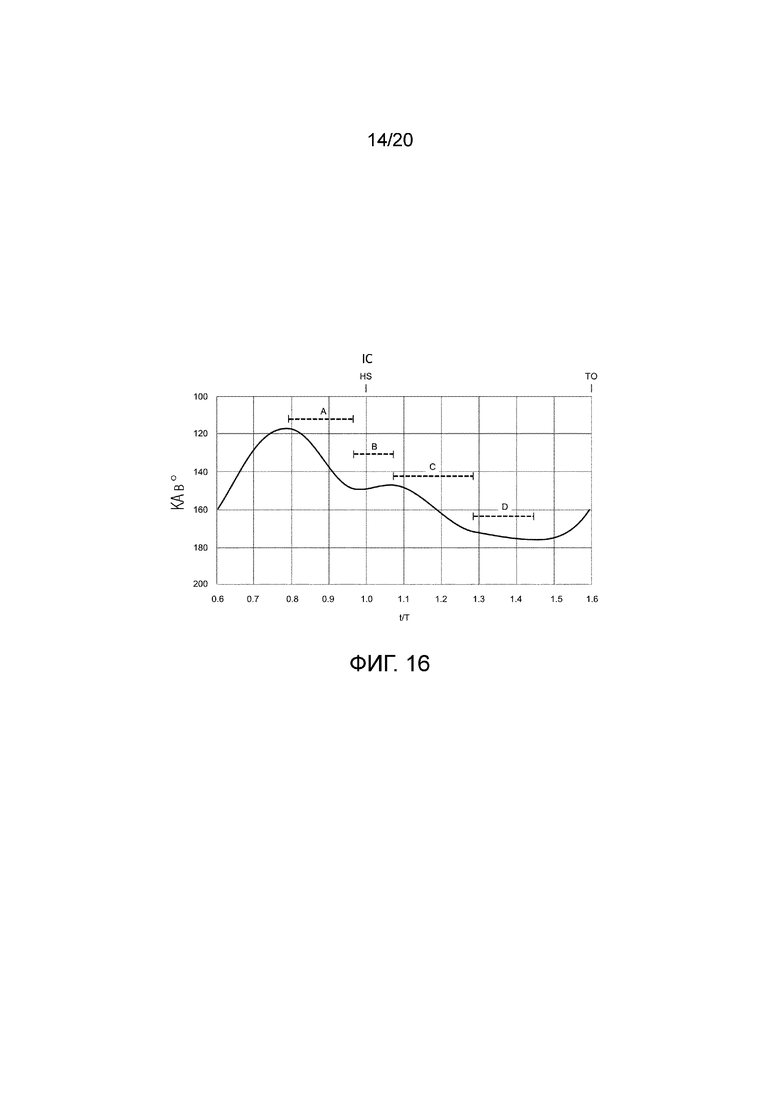
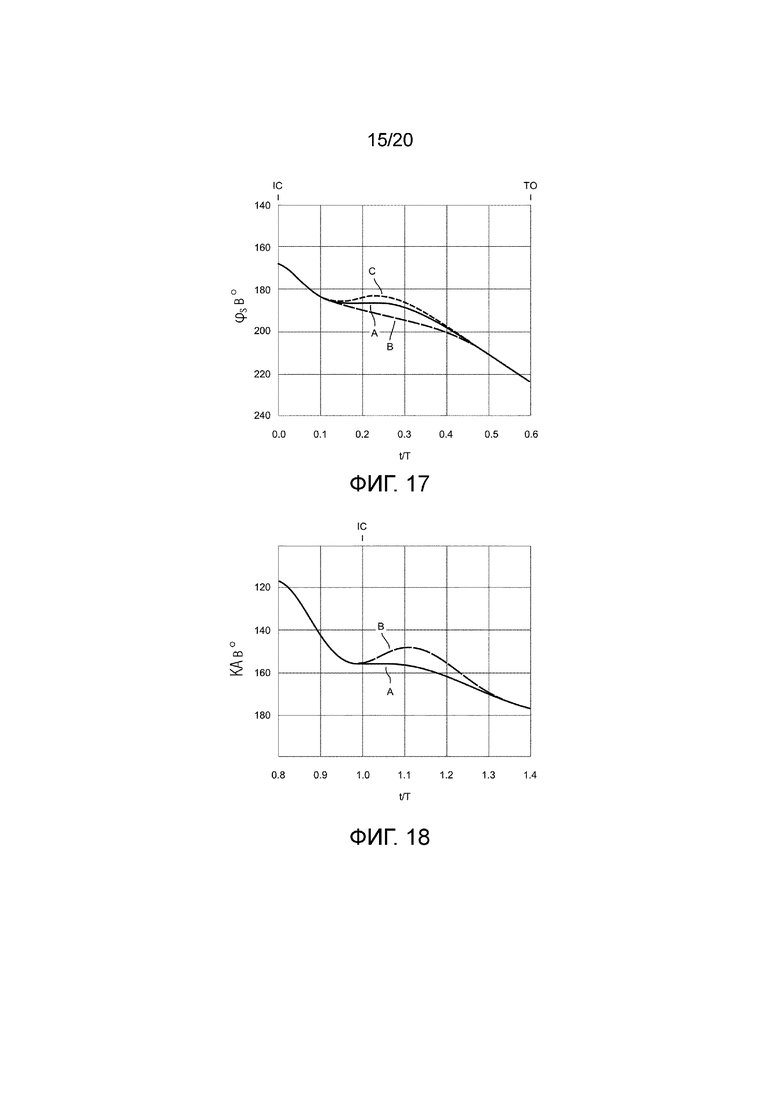
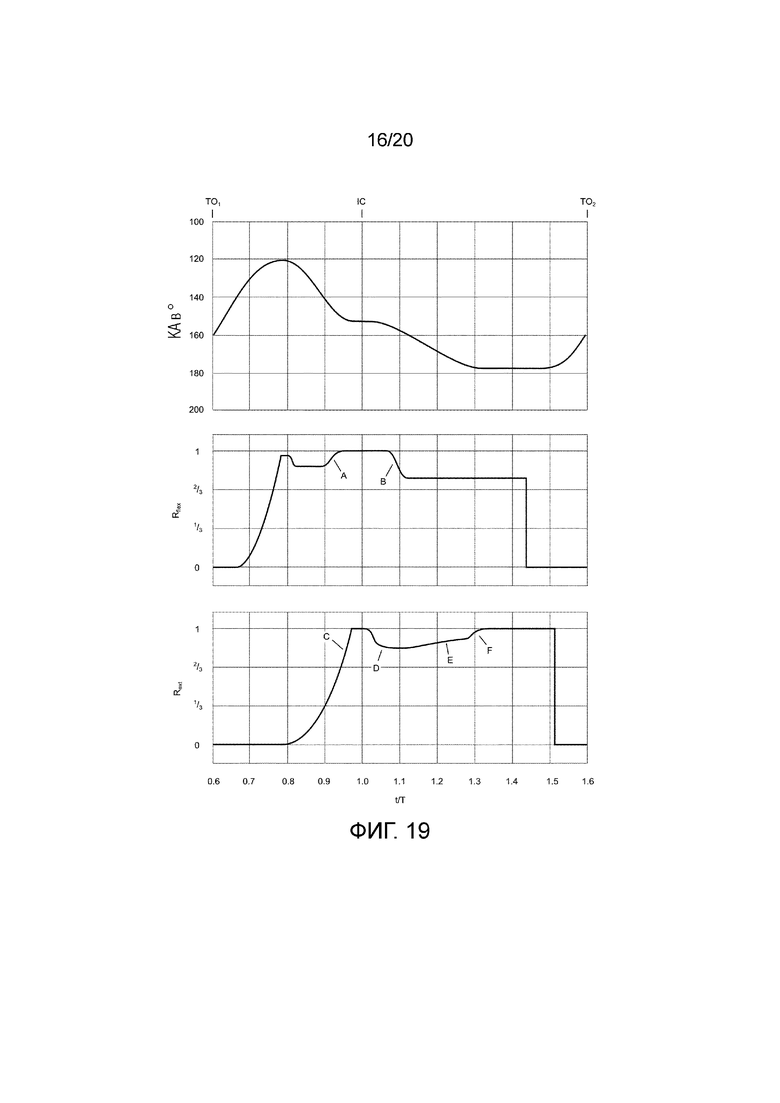
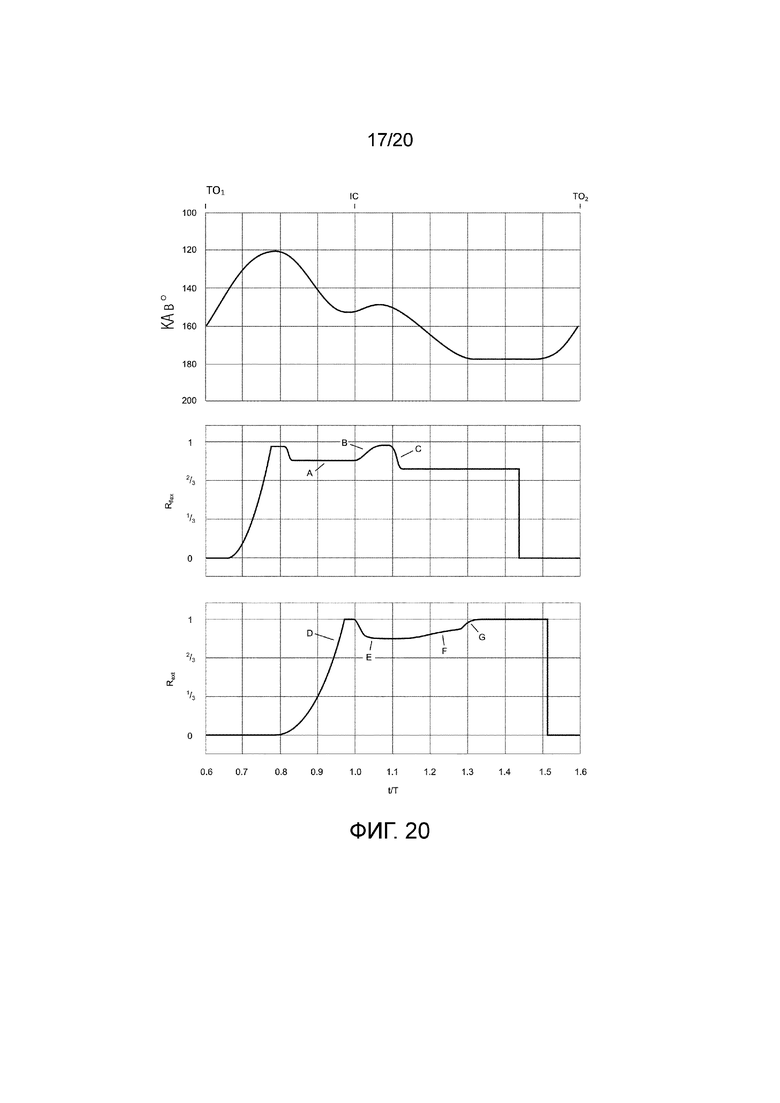
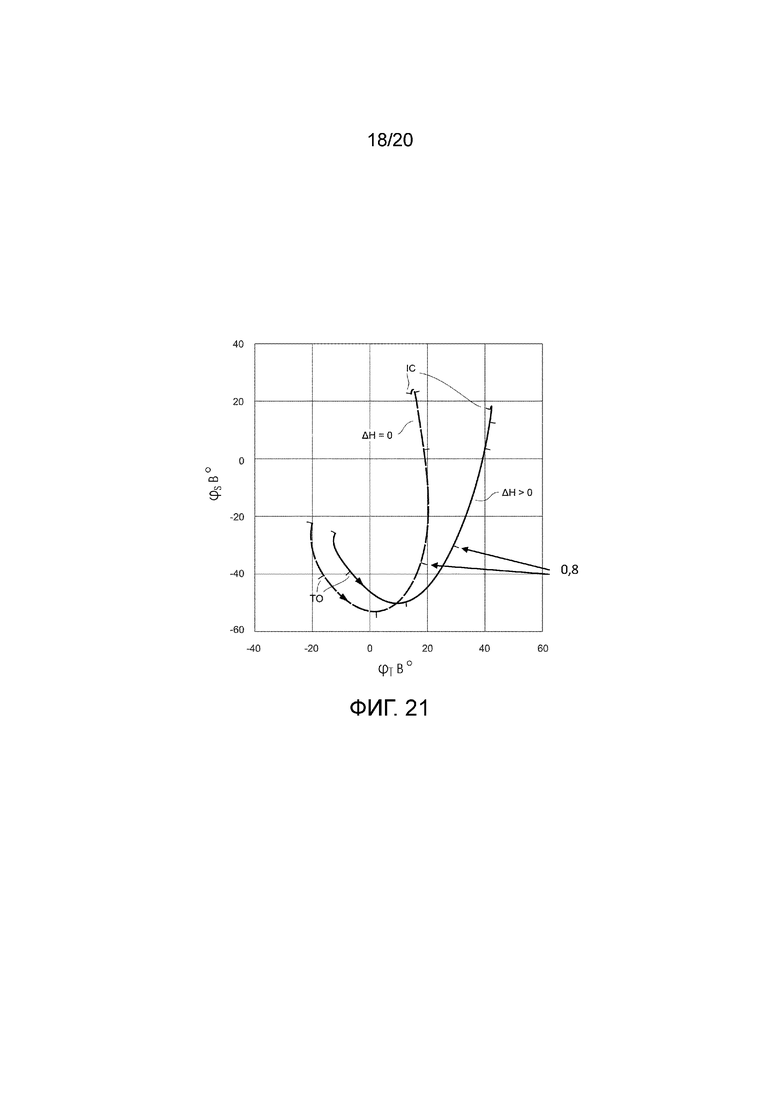
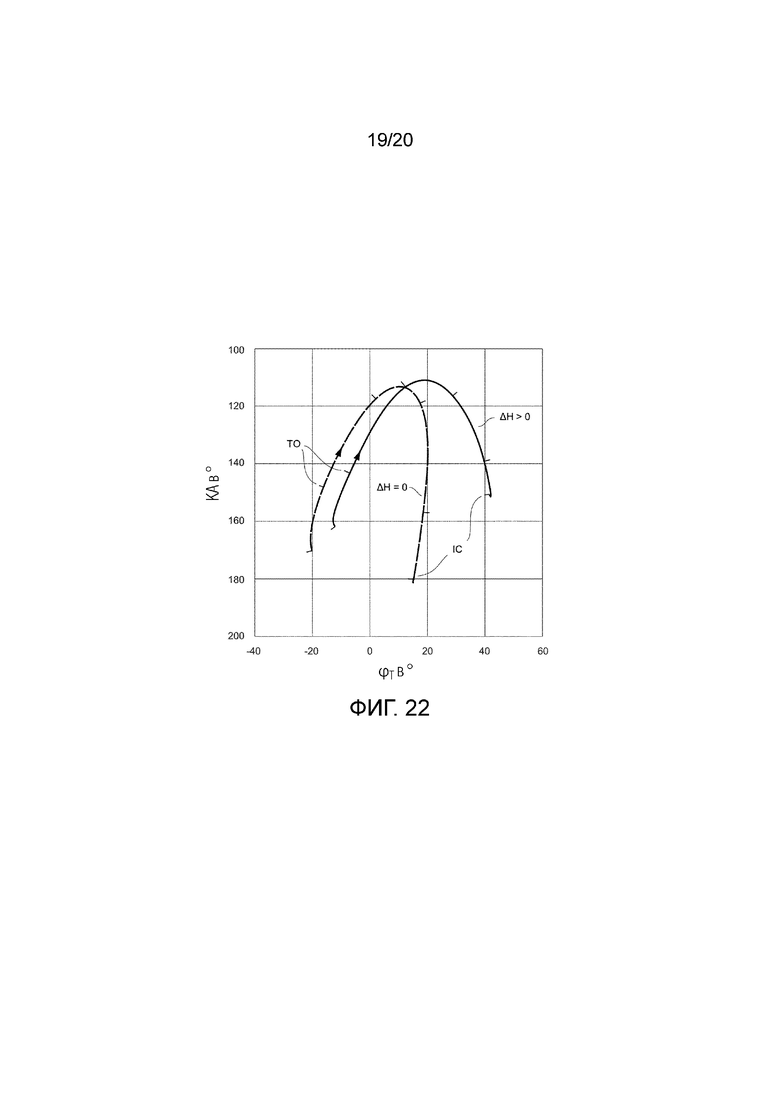
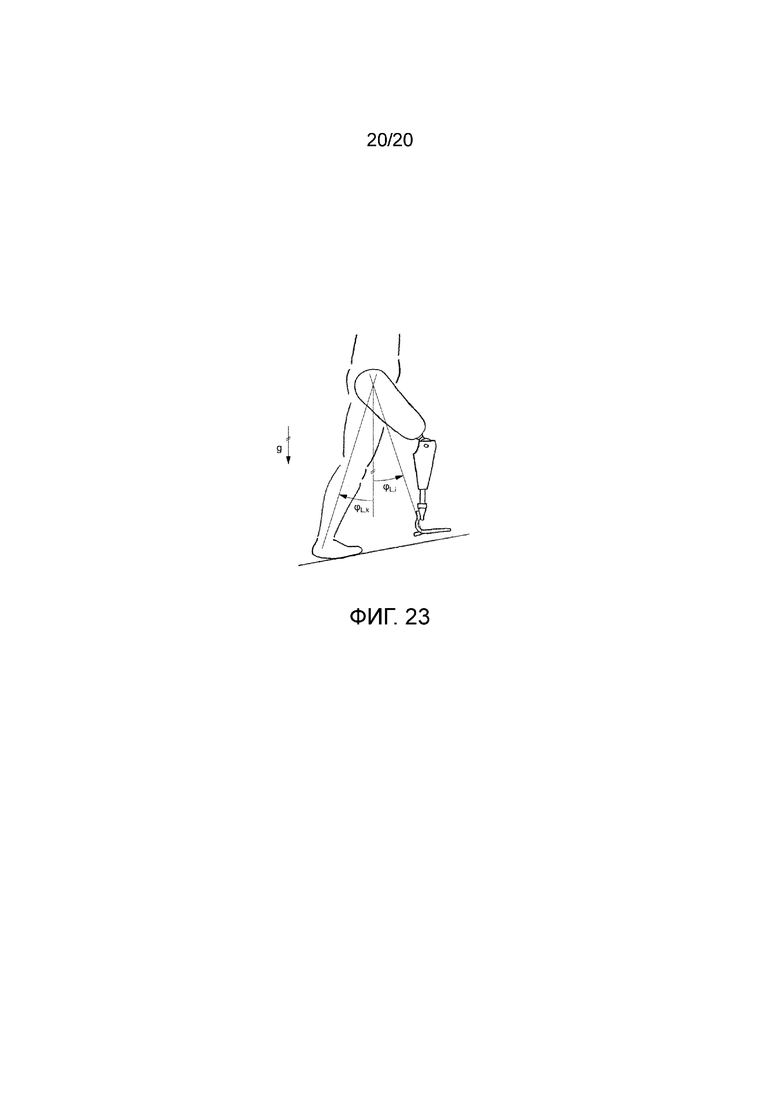
Изобретение относится к способу управления искусственным коленным суставом. Способ управления искусственным коленным суставом (1), имеющим верхнюю часть (10) с передней стороной (11) и задней стороной (12), расположенную с возможностью поворота вокруг коленной оси (15) на верхней части (10) нижней частью (20) с передней стороной (21) и задней стороной (22), расположенный на нижней части (20) отдел (30) стопы, по меньшей мере один датчик (25, 51, 52, 53, 54), соединенное по меньшей мере с одним датчиком (25, 51, 52, 53, 54) управляющее устройство (60) и исполнительный механизм (40), который связан с управляющим устройством (60) и которым с помощью управляющего устройства (60) выставляется доступный угол (KAmax) колена между задней стороной (12) верхней части (10) и задней стороной (22) нижней части (20) в фазе переноса. В зависимости от данных по меньшей мере одного датчика (25, 51, 52, 53, 54) делают заключение о преодолении разницы (ΔH) высот отдела (30) стопы до стопы (33) или отдела стопы контрлатеральной стороны пациента в его опорной фазе или до непосредственно предшествующей опорной фазе части (30) стопы при ходьбе, и регулируют доступный в фазе переноса угол (KAmax) колена. При разнице (ΔH) высот, увеличивающейся противоположно направлению (G) гравитации, снижают доступный угол (KAmax) колена. Техническим результатом является предоставление способа, который позволяет пользователю искусственного коленного сустава лучше справляться с особыми ситуациями при ходьбе. 17 з.п. ф-лы, 23 ил.
1. Способ управления искусственным коленным суставом (1), имеющим верхнюю часть (10) с передней стороной (11) и задней стороной (12), расположенную с возможностью поворота вокруг коленной оси (15) на верхней части (10) нижней частью (20) с передней стороной (21) и задней стороной (22), расположенный на нижней части (20) отдел (30) стопы по меньшей мере один датчик (25, 51, 52, 53, 54), соединенное по меньшей мере с одним датчиком (25, 51, 52, 53, 54) управляющее устройство (60) и исполнительный механизм (40), который связан с управляющим устройством (60) и которым с помощью управляющего устройства (60) выставляется доступный угол (KAmax) колена между задней стороной (12) верхней части (10) и задней стороной (22) нижней части (20) в фазе переноса, при этом в зависимости от данных по меньшей мере одного датчика (25, 51, 52, 53, 54) делают заключение о преодолении разницы (ΔH) высот отдела (30) стопы до стопы (33) или отдела стопы контрлатеральной стороны пациента в его опорной фазе или до непосредственно предшествующей опорной фазе части (30) стопы при ходьбе, и регулируют доступный в фазе переноса угол (KAmax) колена, отличающийся тем, что при разнице (ΔH) высот, увеличивающейся противоположно направлению (G) гравитации, снижают доступный угол (KAmax) колена.
2. Способ по п. 1, отличающийся тем, что разницу (ΔH) высот вычисляют или оценивают из траектории туловища, таза, бедра и/или коленной оси экипированной ноги.
3. Способ по п. 1 или 2, отличающийся тем, что разницу (ΔH) высот вычисляют или оценивают по вертикальному пути тазобедренного сустава экипированной ноги, по вертикальному пути коленной оси (15) и/или вертикальному пути отдела (30) стопы.
4. Способ по одному из предыдущих пунктов, отличающийся тем, что разницу (ΔH) высот определяют по углу (HA) бедра экипированной ноги или ориентации верхней части (10) в пространстве и/или их временным характеристикам.
5. Способ по одному из предыдущих пунктов, отличающийся тем, что разницу (ΔH) высот определяют по временной характеристике угла колена экипированной ноги.
6. Способ по одному из предыдущих пунктов, отличающийся тем, что разницу (ΔH) высот вычисляют или оценивают из отношения горизонтального движения туловища, таза, бедра или коленной оси (15) экипированной ноги к углу (HA) бедра или ориентации верхней части (10) в пространстве.
7. Способ по одному из предыдущих пунктов, отличающийся тем, что разницу (ΔH) высот вычисляют из определенного угла (KAD) колена и определенного угла (HA) бедра.
8. Способ по одному из предыдущих пунктов, отличающийся тем, что доступный угол (KAmax) колена выставляют с помощью регулируемого механического или гидравлического разгибательного упора (45) или с помощью изменения сопротивления движению против разгибания колена.
9. Способ по одному из предыдущих пунктов, отличающийся тем, что в качестве параметра доступного угла (KAmax) колена используют ориентацию нижней части (20) в пространстве.
10. Способ по одному из предыдущих пунктов, отличающийся тем, что разницу (ΔH) высот определяют или оценивают по измеренному датчиком (25) угла колена на искусственном коленном суставе (1) углу (KAD) колена и/или по измеренному датчиком (51, 52) пространственного положения пространственному положению верхней части (10) и/или нижней части (20).
11. Способ по одному из предыдущих пунктов, отличающийся тем, что доступный угол (KAmax) колена выставляют в фазе переноса и удерживают вплоть до достижения предварительно определенного пространственного положения и/или движения нижней части (20) и/или верхней части (10) вплоть до достижения угла (AA) сустава лодыжки и/или точки (PF) приложения силы в отдел (30) стопы и/или в течение предварительно заданного промежутка времени.
12. Способ по одному из предыдущих пунктов, отличающийся тем, что после смены направления движения бедра удерживают постоянной ориентацию нижней части (20) в пространстве вплоть до детектирования начального контакта, аксиальной силы (FA) на нижнюю часть (20) и/или изменения угла (AA) сустава лодыжки.
13. Способ по одному из предыдущих пунктов, отличающийся тем, что преодоление разницы высот при ходьбе обнаруживают по временной характеристике ориентации верхней части и/или соотношению ориентации верхней части к поступательному горизонтальному движению коленной оси (15), и регулируют доступный угол (KAmax) колена на основе этой характеристики и/или соотношения.
14. Способ по одному из предыдущих пунктов, отличающийся тем, что сопротивление сгибанию в фазе переноса после смены направления движения нижней части (20) выставляют на уровень выше, чем при горизонтальной ходьбе.
15. Способ по одному из предыдущих пунктов, отличающийся тем, что при распознании преодоления разницы (ΔH) высот при ходьбе уменьшают максимально доступный угол (KAmax) колена на 10°-25°.
16. Способ по п. 13 или 15, отличающийся тем, что преодоление разницы (ΔH) высот при ходьбе представляет собой ходьбу в гору или ходьбу по лестнице.
17. Способ по одному из предыдущих пунктов, отличающийся тем, что сопротивление движению постоянно уменьшают против разгибательного движения коленного сустава в фазе переноса.
18. Способ по одному из предыдущих пунктов, отличающийся тем, что разницу (ΔH) высот используют как параметр для доступного угла (KAmax) колена, и активируют или деактивируют исполнительный механизм (40) на основании этого параметра.
| DE102007053389A1, 20.05.2009 | |||
| DE102006021802A1, 15.11.2007 | |||
| EP3156010A1, 19.04.2017 | |||
| DE102012013141A1, 08.05.2014 | |||
| DE102015106392A1, 27.10.2016 | |||
| DE102009052887A1, 19.05.2011. |

