Изобретение относится к ракетной технике и может быть использовано в конструкции малогабаритных ракетных выстрелов.
В конструкциях многих ракет (преимущественно, зенитных) для придания им высокой скорости полета на начальном участке траектории применяют стартовый двигатель, обычно отделяющийся от ракеты после выгорания стартового топлива, имеющий тандемное заднее расположение и, в ряде случаев, больший калибр (бикалиберная схема), как, например, в ракете Wolverine фирмы ВАС Великобритании [1].
Одним из основных требований, предъявляемых к конструкции ракеты, является требование ее минимальной длины в транспортном положении при сохранении всех прочих характеристик. Выполнение этого требования обеспечивает более рациональное использование полезного объема носителя, облегчает требования к работе приводов наведения, снижает вес ракеты в контейнере.
Одним из известных решений по сокращению длины 2-х ступенчатой ракеты в транспортном положении является выполнение ее телескопической, т.е. с соосным размещением маршевой ступени внутри стартовой с выдвижением маршевой ступени при пуске ракеты и дальнейшим полетом 2-х ступенчатой ракеты с тандемным задним расположением стартового двигателя до момента разделения. Такая компоновка определяет аэродинамическую схему маршевой ступени (как правило - "утка").
Известна конструкция 2-х ступенчатой ракеты [2], в которой маршевая ступень до пуска размещается внутри стартового двигателя, при этом в передней части стартового двигателя закреплен блок крыльев маршевой ступени. При пуске маршевая ступень телескопически выдвигается на всю длину камеры сгорания, фиксируясь в выдвинутом положении относительно стартовой ступени и фиксируя на себе блок крыльев. По окончании стартового участка полета происходит отделение стартового двигателя.
Недостатками описанной конструкции являются:
- сложность конструкции, связанная с необходимостью решения целого ряда вопросов - фиксации ступеней в сложенном положении, выдвижения маршевой ступени, фиксации ее в выдвинутом положении и т.д., каждый из которых представляет собой сложную конструкторскую задачу, что, в конечном счете, снижает надежность конструкции в целом;
- невозможность обеспечения достаточно жесткого соединения выдвинутой маршевой ступени со стартовым двигателем из-за необходимости выполнения зазоров по посадочным поверхностям для обеспечения относительного перемещения маршевой ступени.
Указанных недостатков в значительной мере лишена конструкция 2-х ступенчатой ракеты [3], являющаяся наиболее близким аналогом (прототипом) настоящего изобретения, содержащая стартовый двигатель, в который телескопически входит цилиндрическая кормовая часть маршевой ступени, жестко соединенной узлом разделения со стартовым двигателем на стартовом участке полета и отделяющейся от него по окончании работы двигателя. Частичное вхождение маршевой ступени в стартовый двигатель обеспечивает сокращение длины.
Недостатком указанной конструкции являются значительные возмущения, действующие на маршевую ступень управляемой ракеты при разделении. Это связано с наличием управляющего сигнала на стартовом участке, вызывающего отклонение органов управления (рулей) и, соответственно, появление управляющего момента, передаваемого на кормовую часть маршевой ступени, взаимодействующую с посадочным диаметром гнезда в стартовом двигателе. При этом радиальное усилие взаимодействия парируется стартовым двигателем, выполняемым, как правило, стабилизированным за счет своего хвостового оперения, во все время стартового совместного полета ступеней, а при разделении - все время относительного перемещения заднего торца кормовой части маршевой ступени по посадочному диаметру гнезда стартового двигателя, т.е. все указанное время управляющее отклонение рулей обеспечивает управление (т.е. поворот вокруг общего центра масс на угол атаки) ракетой, имеющей большую массу и запас устойчивости, что требует большого отклонений рулей. В момент же расцепления заднего торца маршевой ступени с посадочным диаметром стартового двигателя это отклонение рулей не может быть мгновенно уменьшено, поскольку процесс разделения длится миллисекунды, поэтому в момент расцепления маршевая ступень, имеющая меньшую массу и запас устойчивости, чем ракета в целом до разделения, под действием большого отклонения рулей совершает резкий угловой разворот, увеличивающий угол атаки и производимый не относительно ее центра масс, а относительно крайней точки контакта заднего торца с посадочным диаметром, что увеличивает плечо приложения управляющей силы и может вызвать увеличение угла атаки ступени за пределы допустимого, следствием чего может быть выход маршевой ступени из луча управления и, соответственно, потеря ракеты.
Целью настоящего изобретения является уменьшение возмущений маршевой ступени управляемой ракеты при разделении, и как следствие - повышение надежности.
Для достижения указанной цели в известной бикалиберной управляемой ракете, содержащей отделяемый стартовый двигатель, телескопически соединенный с кормовой частью маршевой ступени посредством цилиндрического посадочного гнезда, кормовая часть маршевой ступени и посадочное гнездо под нее выполнены ступенчатыми с обнижением к заднему торцу, а стартовый двигатель в передней части снабжен дестабилизатором и ослаблениями в виде сквозных продольных прорезей.
Такое конструктивное решение обеспечивает аэродинамическое демпфирование возмущающего момента, действующего на кормовую часть маршевой ступени при разделении за счет активного воздействия передней части стартового двигателя на кормовую часть маршевой ступени посредством дестабилизатора с одновременным гашением динамического удара посредством ослабления в передней части посадочного гнезда.
Сравнение предлагаемого технического решения с прототипом позволило установить это соответствие критерию "новизна". При изучении других известных технических решений в данной области техники признаки, отличающие предлагаемое решение от прототипа, не были выявлены, и поэтому они обеспечивают предлагаемому техническому решению соответствие критерию "изобретательский уровень".
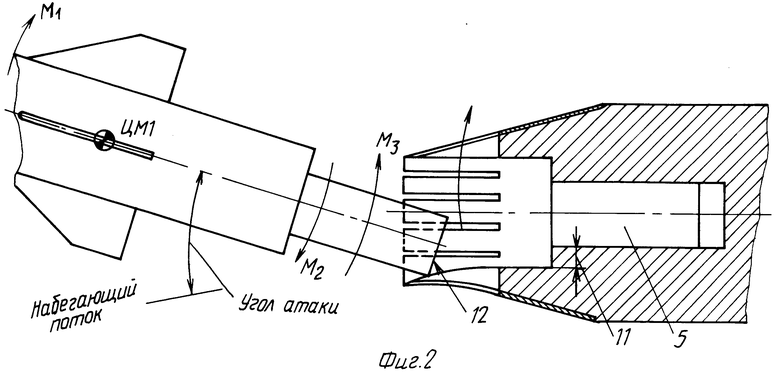
На фиг. 1 изображен внешний вид ракеты в исходном положении; на фиг.2 - взаимное положение ступеней ракеты в процессе разделения (в момент соударения).
Предлагаемая бикалиберная ракета содержит маршевую ступень 1 (фиг. 1) и стартовый двигатель 2, жестко соединенные посредством узла фиксации-расфиксации 3. При этом кормовая часть 4 маршевой ступени 1 размещена в посадочном гнезде 5 (фиг. 2) в передней части стартового двигателя. Кормовая часть 4 и соответствующее ей посадочное гнездо 5 выполнены ступенчатыми, состоящими минимум из двух цилиндрических поверхностей - большего диаметра 6 и меньшего 7. На наружной поверхности передней части двигателя 2 размещен дестабилизатор, представляющий собой в общем случае любую аэродинамическую поверхность (плоские лопасти, цилиндрические или конические поверхности), расположенную впереди центра масс (ЦМ2) стартового двигателя. На предлагаемом чертеже дестабилизатор представляет собой юбку 8 с конической наружной поверхностью, жестко связанную с передней частью двигателя. Передняя часть двигателя 2 выполнена с ослаблениями в виде продольных сквозных прорезей 9 на длину не более длины участка 6 гнезда 5. В передней части маршевой ступени установлены органы управления - рули 10, для схемы "утка" расположенные впереди центра масс маршевой ступени.
Работа устройства осуществляется следующим образом.
На стартовом участке полета бикалиберная ракета летит с жестко соединенными между собой ступенями 1 и 2, при этом управляющий сигнал системы управления преобразуется в угловые отклонения рулей 10, вызывающие появление управляющего момента М1, и поворот оси всей ракеты как единого целого относительно общего центра масс ЦМО на угол атаки к набегающему потоку. По окончании работы стартового двигателя срабатывает узел расфиксации 3 и маршевая ступень 1 начинает относительное движение своей кормовой части 4 относительно посадочного гнезда 5, активное либо пассивное (под действием разности тормозных усилий от набегающего потока). При этом пока участки 6 и 7 находятся во взаимодействии с ответными участками посадочного гнезда 5, управляющее воздействие рулей происходит, как и на стартовом участке (на маршевую ступень и двигатель как единое целое). Как только взаимодействие участков 6 и 7 с ответными участками гнезда 5 прекращается, под действием управляющего момента М1 маршевая ступень начинает резкий разворот относительно своего центра масс ЦМ1, поскольку при той же величине управляющего момента величины массы, экваториального момента инерции Jzz и запаса устойчивости разворачиваемой ступени значительно меньше первоначальных. Одновременно происходит угловой разворот двигателя относительно своего центра масс ЦМ2 в сторону, противоположную направлению разворота маршевой ступени, под действием набегающего потока воздуха на дестабилизатор (конус 8), расположенный под углом атаки к потоку. При этом маршевая ступень и двигатель перемещаются относительно друг друга в осевом направлении. Взаимный встречный разворот ступеней происходит в пределах перепада 11 между диаметрами поверхностей 6 и 7, при этом в конечном счете происходит соударение торца 12 маршевой ступени с поверхностью 6 гнезда 5 (фиг. 2) в зоне прорезей 9. Этот удар гасит разворот маршевой ступени за счет энергии разворота двигателя, уменьшая ее угловую скорость и величину заброса по углу атаки в момент расцепления.
Наличие прорезей 9 на конической поверхности обеспечивает уменьшение жесткости удара.
Величина перепада диаметров кормовой части, длины участков 6 и 7 посадочного гнезда 5 и размеры прорезей выбираются в каждом конкретном случае расчетом в зависимости от инерционно-массовых характеристик ступеней, величины максимального отклонения рулей, скорости, конструктивных соображений и уточняются при отработке.
Таким образом, в предлагаемом техническом решении обеспечивается уменьшение возмущений (величины заброса) маршевой ступени в момент разделения за счет энергии корпуса двигателя, который препятствует ее развороту на недопустимый угол.
Источники информации.
1. Бюллетень ОНТИ N 84, июнь 1989.
2. Патент США N 3491692, кл. 102-49.4, 1970.
3. Патент США N 5005781, кл. 244-3.26, 1991.
| название | год | авторы | номер документа |
|---|---|---|---|
| БИКАЛИБЕРНАЯ УПРАВЛЯЕМАЯ РАКЕТА | 1998 |
|
RU2127418C1 |
| БИКАЛИБЕРНАЯ УПРАВЛЯЕМАЯ РАКЕТА | 2014 |
|
RU2569995C1 |
| СПОСОБ ОТДЕЛЕНИЯ РАЗГОННОГО ДВИГАТЕЛЯ БИКАЛИБЕРНОЙ РАКЕТЫ И РАКЕТА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2401413C1 |
| ДВУХСТУПЕНЧАТАЯ РАКЕТА | 2002 |
|
RU2222774C1 |
| БИКАЛИБЕРНАЯ РАКЕТА | 2006 |
|
RU2349870C2 |
| РАКЕТА | 2002 |
|
RU2222771C1 |
| Бикалиберная ракета | 2017 |
|
RU2657300C1 |
| РАКЕТА | 2009 |
|
RU2399867C1 |
| РАКЕТА | 2004 |
|
RU2279629C2 |
| РАКЕТА | 2003 |
|
RU2247309C1 |
Использование: бикалиберная управляемая ракета предназначена для малогабаритных ракетных выстрелов. Отделяемый стартовый двигатель ракеты телескопически соединен с кормовой частью маршевой ступени. Кормовая часть маршевой ступени и посадочное гнездо под нее в стартовом двигателе выполнены цилиндрическими, ступенчатыми с обнижением к заднему торцу. Стартовый двигатель в передней части снабжен дестабилизатором и ослаблениями в виде сквозных прорезей. Конструкция позволяет уменьшить возмущения маршевой ступени при разделении. 1 з.п.ф-лы, 2 ил.
| US, патент, 3491692, кл | |||
| Устройство для усиления микрофонного тока с применением самоиндукции | 1920 |
|
SU42A1 |
| US, патент, 5005781, кл | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |

