Изобретение относится к области контрольно-измерительной техники и может быть использовано при дефектоскопическом контроле ферромагнитных материалов и изделий.
Известен магнитный дефектоскоп [1] , содержащий блок намагничивания, последовательно соединенные датчик скорости движения магниточувствительного узла, блок синхронизации, формирователь адресных токов, магниточувствительный блок, усилитель и АЦП.
Однако это устройство обладает низкой надежностью, поскольку, предназначенное для использования в условиях производства или эксплуатации крупногабаритных ферромагнитных изделий, например, на нефте- и газопроводах, в цехах, на полигонах, оно подвергается воздействию внешних разрушительных факторов, в том числе и механических. Одним из наиболее уязвимых мест дефектоскопа при этом является датчик скорости движения магниточувствительного узла, стирание механической части и загрязнение подвижных узлов которого приводит к снижению точности контроля и выходу дефектоскопа из строя.
Известен магнитотелевизионный дефектоскоп [21, содержащий магниточувствительный узел, видеоусилитель, видеоконтрольный блок, блок управления и датчик скорости движения, позволяющий осуществлять построчное сканирование контролируемой поверхности.
При этом данный дефектоскоп обладает существенным недостатком, связанным со сложностью схемы измерения и синхронизации датчика скорости.
Наиболее близким по технической сущности к заявляемому устройству является линейный преобразователь магнитных полей [3], содержащий блок намагничивания.
Недостатком данного устройства является его низкая точность и надежность.
Целью изобретения является повышение точности и надежности магнитографического ортографа.
Поставленная цель достигается тем, что в электронно-механическом магнитографическом ортографе, содержащем блок намагничивания, строчный преобразователь магнитного поля и видеоконтрольное устройство, блок намагничивания снабжен четырьмя колесиками, расположенными с внешних сторон его полюсов таким образом, что при установке блока намагничивания на колесиках на поверхности объекта контроля между его полюсами и объектом контроля образуется зазор, введены микроконтроллер, пульт управления, выходом связанный с первым входом микроконтроллера, второй вход которого подсоединен к выходу строчного преобразователя магнитного поля, последовательно включенные цифро-аналоговый преобразователь, подключенный входом к первому выходу микроконтроллера, регулятор мощности электродвигателя и прикрепленный к электромагниту шаговый электродвигатель, ротор которого механически связан с двумя колесиками, расположенными на разных полюсах электромагнита и размещенными на одной оси, а также блок запуска электродвигателя, входом связанный со вторым выходом микроконтроллера, а выходом - со входом шагового электродвигателя, причем третий выход микроконтроллера подключен ко входу строчного преобразователя магнитного поля, четвертый - ко входу блока питания электромагнита, а пятый - ко входу видеоконтрольного устройства.
Отличительной особенностью заявляемого устройства является то, что намагничивающий блок снабжен четырьмя колесиками, расположенными с внешних сторон его полюсов таким образом, что при установке намагничивающего блока на колесиках на поверхности объекта контроля между его полюсами и объектом контроля образуется зазор, введены микроконтроллер, пульт управления, выходом связанный с первым входом микроконтроллера, второй вход которого подсоединен к выходу строчного преобразователя магнитного поля, последовательно включенные цифроаналоговый преобразователь, подключенный входом к первому выходу микроконтроллера, регулятор мощности электродвигателя и прикрепленный к электромагниту шаговый электродвигатель, ротор которого механически связан с двумя колесиками, расположенными на разных полюсах электромагнита и размещенными на одной оси, а также блок запуска электродвигателя, входом связанный со вторым выходом микроконтроллера, а выходом - со входом шагового электродвигателя, причем третий выход микроконтроллера подключен ко входу преобразователя магнитного поля, четвертый - ко входу блока питания электромагнита, а пятый - ко входу видеоконтрольного устройства.
Известно использование шаговых электродвигателей, их регуляторов мощности и блоков запуска при создании гибких автоматизированных комплексов, роботов, в вычислительной технике (в механических узлах принтеров, например) и т. д. Однако применение их в дефектоскопии для осуществления процесса считывания распределенного магнитного поля рассеяния от дефекта авторам не известно и в литературе не встречалось.
Известно применение ЦАП и микроконтроллеров в системах управления гибкими автоматизированными процессами, измерительных и бытовых радиоэлектронных приборах. Однако в заявляемом магнитографическом ортографе эти блоки служат для сканирования пространственно распределенного магнитного поля рассеяния от дефектов электронно-механическим способом. При этом местоположение измерительного преобразователя относительно исследуемого поля определяется путем подсчета микроконтроллером импульсов синхронизации, поступающих на шаговый электродвигатель.
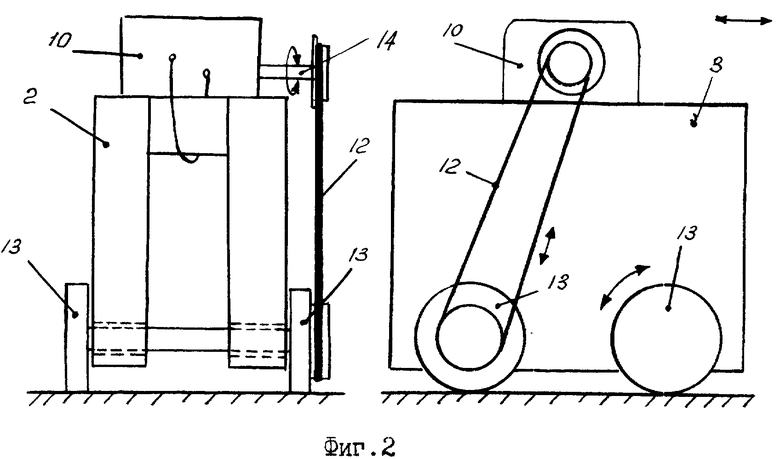
На фиг. 1 приведена блок-схема ортографа; на фиг. 2 - конструкция его механической части.
На фиг. 1 и 2 изображены: источник 1 питания и его блок 2 намагничивания, связанные между собой, объект 3 контроля, строчный преобразователь 4 магнитного поля, механически закрепленный на блоке 2 намагничивания и выполненный на основе последовательно соединенных строки магниточувствительных элементов, коммутатора, усилителя, фильтра, устройства выборки-хранения и АЦП [4], микроконтроллер 5 (может быть использована, например, микроконтроллерная БИС типа КР1816ВЕ51), входом подключенный к выходу строчного преобразователя 4 магнитного поля видеоконтрольное устройство 6, выполненное в виде персонального компьютера или светодиодного [5] либо жидкокристаллического матричного дисплея с микропроцессорным управлением, блок 7 запуска электродвигателя, основанный на полупроводниковых логических элементах и транзисторных токовых ключах, последовательно подсоединенные ЦАП 8, регулятор 9 мощности электродвигателя на основе мощного транзисторного усилителя и шаговый электродвигатель 10, пульт управления 11, механическая передача между ротором 14 шагового электродвигателя и колесиками 13, выполненная в данном случае при помощи шкива 12, причем выходы микроконтроллера 5 связаны со входами источника 1 питания электромагнита, строчного преобразователя 4 магнитного поля, видеоконтрольного устройства 6, блока 7 запуска электродвигателя и ЦАП 8.
Устройство работает следующим образом.
Оператор с пульта 11 управления инициализирует микроконтроллер 5, который подает на вход блока 7 запуска электродвигателя сигнал, длительность (или частота) которого регулирует время срабатывания шагового электродвигателя 2. С его помощью, используя передаточный механизм (например, зубчатую или ременную передачу), осуществляется вращение ведущих колес 13 и передвижение блока 2 намагничивания с прикрепленным к нему строчным преобразователем 4 магнитного поля относительно объекта 3 контроля. В зависимости от мощности, установленной ЦАП 8 и регулятором 9 мощности электродвигателя, блок 2 намагничивания передвинется на расстояние, определяющее разрешающую способность ортографа. После этого микроконтроллер 5 запускает процесс формирования и измерения поля рассеяния от дефектов.
Запущенный микроконтроллером 5 источник 1 питания подает ток в обмотку статора блока 2 намагничивания, в результате чего блок 2 намагничивания, расположенный на колесиках 13 у поверхности контролируемого объекта 3, намагничивает его и создается приповерхностное магнитное поле рассеяния от дефектов, воздействующее на магниточувствительные элементы строчного преобразователя 4 магнитного поля, которые опрашиваются под управлением микроконтроллера 5. Далее сигналы, поступающие последовательно от каждого из магниточувствительных элементов, преобразуются строчным преобразователем 4 магнитного поля в цифровую форму, кодируются микроконтроллером 5 и передаются на вход видеоконтрольного устройства 6 в виде последовательных или параллельных посылок (например, в формате последовательного интерфейса RS-232С), где, в конечном счете, отображаются на электронно-лучевом, светодиодном или жидкокристаллическом экране в виде яркостной картины либо гистограмм, в зависимости от типа представления информации (двух- или трехмерного).
После того как вся строка магниточувствительных элементов будет опрошена, микроконтроллер 5, с целью снижения потребляемой электромагнитом 2 мощности, отключает источник 1 питания.
В том случае, если управляющего сигнала с пульта 11 управления на контроллер 5 не поступает, блок 2 намагничивания неподвижен и сканирования магниточувствительных элементов преобразователя 4 не производится. В противном же случае описанный выше процесс сканирования повторяется, и на экране видеоконтрольного устройства 6 формируется вторая строка кадра изображения магнитного отпечатка.
Таким образом, при перемещении блок 2 намагничивания с установленным на нем строчным преобразователем 4 магнитного поля формируется полное отображение магнитного отпечатка внутренней структуры контролируемого изделия, по которому можно судить о наличии либо отсутствии дефектов, их размерах и взаимном расположении.
Источники информации
1. А.С. N 1576858. Магнитный дефектоскоп. Авторы: А.А.Абакумов(ст), Е.Г. Типикин, опубл. в Б.И. N 25, 1990.
2. А.С. N 1772717. Магнитотелевизионный дефектоскоп. Авторы: А.А.Абакумов(ст) и др., опубл. в Б.И. N 40, 1992.
3. А.С. N 1449887. Линейный преобразователь магнитных полей. Авторы: А. А.Абакумов и др., опубл. в Б.И. N 1, 1989.
4. Хоровиц П., Хилл У. Искусство схемотехники. В 3-х томах. Том 2.- М.: Мир, 1993, С.257.
5. Семенов П. А. , Первышев В.И. Контроллер матричного дисплея на базе ОЭВМ К1816ВЕ51 - Микропроцессорные средства и системы, N 5,1990, С.47.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАГНИТНЫЙ ОРТОГРАФ | 1995 |
|
RU2098808C1 |
| СТРОЧНЫЙ ПРЕОБРАЗОВАТЕЛЬ МАГНИТНЫХ ПОЛЕЙ | 1988 |
|
RU2006850C1 |
| Магнитотелевизионный дефектоскоп | 1990 |
|
SU1739277A1 |
| ПРЕОБРАЗОВАТЕЛЬ МАГНИТНОГО ПОЛЯ | 1992 |
|
RU2009478C1 |
| Магнитотелевизионный дефектоскоп | 1989 |
|
SU1772717A1 |
| Преобразователь магнитных полей | 1990 |
|
SU1763968A1 |
| Магнитный дефектоскоп | 1988 |
|
SU1576858A1 |
| Матричный преобразователь магнитных полей | 1989 |
|
SU1809375A1 |
| Магнитотелевизионный дефектоскоп и настроечный образец для него | 1989 |
|
SU1681226A1 |
| Магнитнотелевизионный дефектоскоп | 1987 |
|
SU1499205A1 |
Изобретение относится к контрольно-измерительной технике и может быть использовано при дефектоскопическом контроле ферромагнитных материалов и изделий. Устройство содержит электромагнит, строчный преобразователь магнитного поля и видеоконтрольное устройство. Электромагнит снабжен четырьмя колесиками, расположенными с внешних сторон его полюсов. При установке электромагнита на колесиках на поверхность объекта контроля между его полюсами и объектом контроля образуется зазор. Ортограф перемещается по поверхности объекта шаговым двигателем, кинематически связанным с колесиками. Величина перемещения задается цифроаналоговым преобразователем и регулятором мощности двигателя. Управление ортографом осуществляется оператором с пульта управления. Данные измерения отображаются на дисплее. Повышена точность и надежность устройства. 2 ил.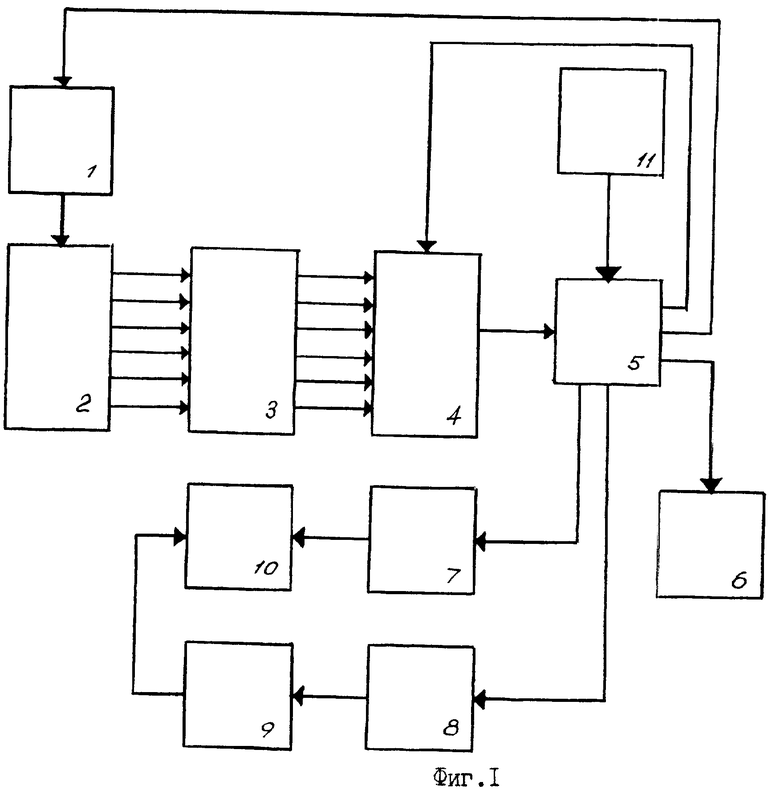
Электронно-механический магнитный ортограф, содержащий блок намагничивания, строчный преобразователь магнитного поля и видеоконтрольное устройство, отличающийся тем, что блок намагничивания выполнен в виде электромагнитна, снабженного четырьмя колесниками, расположенными с внешних сторон его полюсов так, что при установке электромагнита на колесиках на поверхности объекта контроля между его полюсами и объектом контроля образуется зазор, введены микроконтроллер, пульт управления, выходом связанный с первым входом микроконтроллера, второй вход которого подсоединен к выходу строчного преобразователя магнитного поля, последовательно включенные цифроаналоговый преобразователь, подключенный входом к первому выходу микроконтроллера, регулятор мощности электродвигателя и прикрепленный к электромагниту шаговый электродвигатель, ротор которого механически связан с двумя колесиками, расположенными на разных полюсах электромагнита и размещенными на одной оси, блок запуска электродвигателя, входом связанный с вторым выходом микроконтроллера, а выходом - с входом шагового электродвигателя, причем третий выход микроконтроллера подключен к входу строчного преобразователя магнитного поля, четвертый - к входу блока питания электромагнитна, а пятый - к входу видеоконтрольного устройства.
| SU, авторское свидетельство, 1576958, G 01 N 27/82, 1990 | |||
| SU, авторское с видетельство, 1772717, G 01 N 27/90, 1992 | |||
| SU, авторское свидетельств о, 14 49887, G 01 N 27/82, 1989. |
