Изобретение относится к контрольно-измерительной технике и может быть использовано для контроля качества ферромагнитных изделий.
Известен строчный преобразователь магнитных полей, содержащий намагничивающее устройство, магниточувствительный узел, видеоусилитель, аналого-цифровой преобразователь (АЦП), полупроводниковое запоминающее устройство, цифроаналоговый преобразователь (ЦАП), блок разверток и видеоконтрольное устройство [1]
Недостаток данного преобразователя является его низкая производительность, обусловленная невысоким быстродействием ЦАП и АЦП (время их преобразования составляет не менее 5-7 мс).
Известен твердотельный матричный преобразователь [2] содержащий магниточувствительный узел, выполненный на основе матрицы элементов Холла, объединенных по группам и строкам посредством токопроводящих полосок, развертки и видеоконтрольное устройство.
Наиболее близким по технической сущности к заявленному устройству является преобразователь магнитных полей к дефектоскопу [3] содержащий намагничивающее устройство, сканирующий преобразователь магнитного поля и видеоконтрольный терминал.
Недостатком данного устройства является его низкая точность и узкий диапазон функциональных возможностей.
Целью изобретения является повышение точности и расширение функционального диапазона устройства.
Поставленная цель достигается тем, что в магнитный ортограф, содержащий намагничивающее устройство, сканирующий преобразователь магнитного поля и видеоконтрольный терминал, введены контроллер преобразователя, приемник преобразователя, передатчик терминала, контроллер терминала, пульт управления и масштабно-временной преобразователь, причем первый вход контроллера преобразователя подключен к выходу сканирующего преобразователя распределенного магнитного поля, второй к выходу масштабно-временного преобразователя, а третий к выходу приемника преобразователя, первый выход контроллера преобразователя подсоединен к входу сканирующего преобразователя распределенного магнитного поля, второй к входу намагничивающего устройства, третий к входу передатчика преобразователя, а четвертый к входу масштабно-временного преобразователя, первый вход контроллера терминала подключен к выходу пульта управления, а второй к выходу приемника терминала, последовательно связанного через линию связи с передатчиком преобразователя, первый выход к входу передатчика терминала, последовательно связанного посредством линии связи с приемником преобразователя, второй выход к входу видеоконтрольного терминала, а масштабно-временной преобразователь механически связан со сканирующим преобразователем распределенного магнитного поля и намагничивающим устройством.
Кроме того, намагничивающее устройство выполнено в виде передвижного намагничивающего устройства на колесах, соединенного механической связью со сканирующим преобразователем магнитного поля, а в качестве масштабно-временного преобразователя использован либо шаговый электродвигатель, выходом подсоединенный к входу контроллера преобразователя, размещенный на намагничивающем устройстве, причем его ротор механически связан с ведущей частью намагничивающего устройства, либо преобразователя перемещения в частоту импульсов, выход которого связан с входом контроллера преобразователя.
В качестве линии связи использован либо атмосферный воздух, а передатчиков и приемников преобразователя и терминала соответственно радиопередатчики, или радиоприемники, или электропроводящий кабель.
Кроме того, в качестве магниточувствительных элементов сканирующего преобразователя распределенного магнитного поля использованы последовательно соединенные токовыми электродами элементы Холла, причем их токовые электроды гальванически развязаны с Холловскими, а Холловские электроды не имеют общих точек, либо Z-элементы с источником питания и балансным резистором, подключаемые анодом к положительному полюсу источника питания, отрицательный полюс которого связан через балансный резистор с катодом Z-элемента и "землей".
Отличительная частью ортографа является то, что в него введены контроллер преобразователя, приемник преобразователя, передатчик преобразователя, линия связи, приемник терминала, передатчик терминала, контроллер терминала, пульт управления и масштабно-временной преобразователь, причем первый вход контроллера преобразователя подключен к выходу сканирующего преобразователя распределенного магнитного поля, второй к выходу масштабно-временного преобразователя, а третий к выходу приемника преобразователя, первый выход контроллера преобразователя подсоединен к входу сканирующего преобразователя распределенного магнитного поля, второй к входу намагничивающего устройства, третий к входу передатчика преобразователя, а четвертый к входу масштабно-временного преобразователя, первый вход контроллера терминал подключен к выходу пульта управления, а второй к выходу приемника терминала, последовательно связанного через линию связи с передатчиком преобразователя, первый выход к входу передатчика терминала, последовательно связанного посредством линии связи с приемником преобразователя, второй выход к входу видеоконтрольного терминала, а масштабно-временной преобразователь механически связан со сканирующим преобразователем распределенного магнитного поля и намагничивающим устройством, намагничивающее устройство выполнено в виде передвижного намагничивающего устройства на колесах, соединенного механической связью со сканирующим преобразователем магнитного поля, в качестве масштабно-временного преобразователя использован шаговый электродвигатель, выходом подключенный к входу контроллера преобразователя, размещенный на намагничивающем устройстве, причем его ротор механически связан с ведущей частью намагничивающего устройства, либо преобразователь перемещения в частоту импульсов, выход которого связан с входом контроллера преобразователя, в качестве линии связи использован атмосферный воздух, а передатчиков и приемников преобразователя и терминала радиопередатчики, или радиопередатчики соответственно, или электропроводящий кабель, в качестве магниточувствительных элементов сканирующего преобразователя распределенного магнитного поля использованы последовательно соединенные токовыми электродами элементы Холла, токовые электроды которых гальванически развязаны с Холловскими, а Холловские электроды не имеют общих точек, либо Z-элементы с источником питания с балансным резистором, подключаемые анодом к положительному полюсу источника питания, отрицательный полюс которого связан через балансный резистор с катодом Z-элемента и "землей".
Известно использование микроконтроллеров в измерительных и бытовых радиоэлектронных приборах и т.д. однако в заявленном устройстве микроконтроллер служит для создания поля рассеяния от дефектов, управления процессом его сканирования и формирования видеосигнала.
Известно использование передвижных намагничивающих устройств в магнитографической дефектоскопии. В отличие от известных случаев применения в заявленном устройстве данный блок соединен механической связью со сканирующим преобразователем магнитного поля, что дает возможность осуществить сканирование поверхности объекта контроля непосредственно во время намагничивания и одновременно получить ортографическое изображение внутренней структуры объекта контроля.
Известно использование шаговых электродвигателей, их регуляторов мощности и блоков запуска при создании гибких автоматизированных комплексов, роботов, в системах диагностики энергетического оборудования (в качестве транспортных модулей, например) и т.д. Однако применение их в дефектоскопии для осуществления процесса считывания распределенного магнитного поля рассеяния от дефекта авторам не известно и в литературе не встречалось.
В литературе описаны масштабно-временные преобразователи, используемые в вычислительной технике в качестве графических манипуляторов. При этом, однако, их использование с целью визуализации магнитных полей авторам не известно.
Известно использование датчиков Холла при визуализации магнитных полей. При этом устройство на их основе обладают низкой точностью из-за того, что Холловские электроды датчиков подключены к измерительной схеме параллельно, что приводит к появлению аддитивной погрешности в результате наличия гальванической связи между элементами преобразователя.
Использование Z-элементов с целью создания преобразователей магнитного поля для отображения рассеяния от дефектов автору неизвестно и в литературе не встречались.
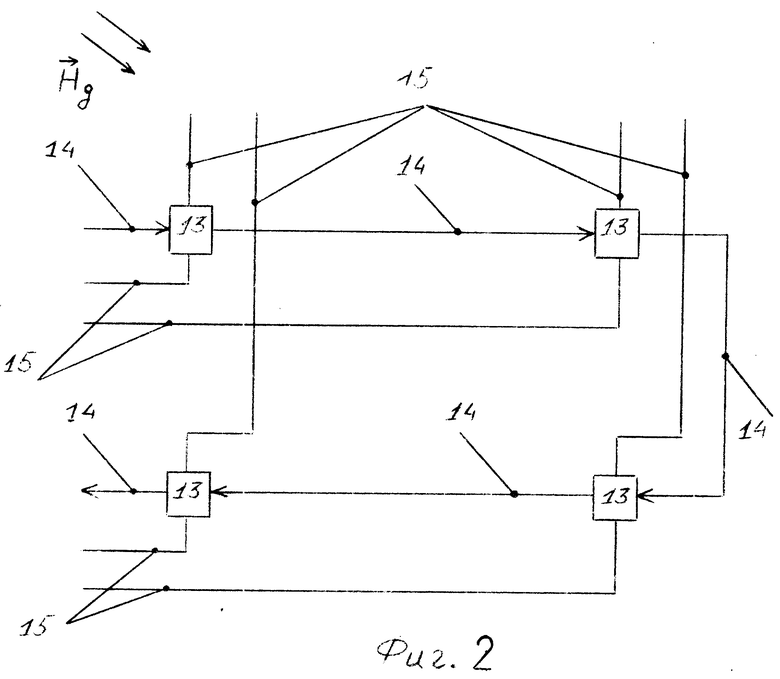
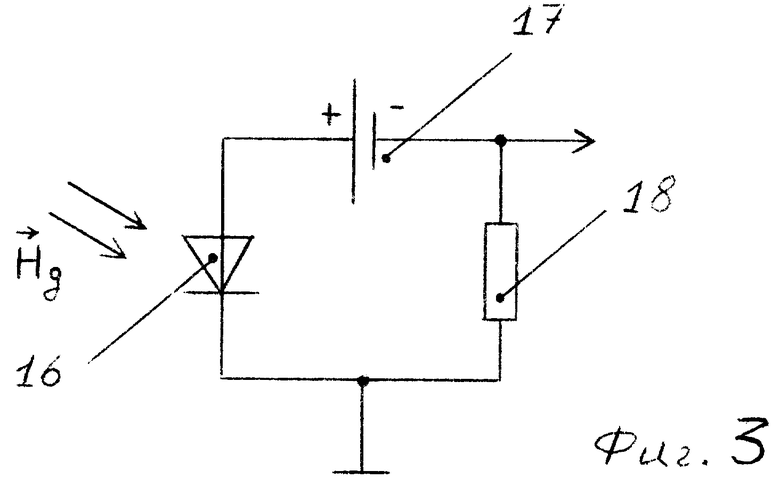
На фиг. 1 показана блок-схема магнитного ортографа; на фиг. 2 схема включения магниточувствительных элементов на основе датчиков Холла; на фиг. 3 подключение Z-элемента.
На фиг. 1-3 показаны следующие блоки магнитного ортографа; намагничивающее устройство 1, объект 2 контроля, сканирующий преобразователь 3 магнитного поля, контроллер 4 преобразователя, передатчик 5 преобразователя, приемник 6 терминала, контроллер 7 терминала, видеоконтрольный терминал дисплея [4] пульт 9 управления, передатчик 10 терминала, приемник 11 преобразователя, масштабно-временной преобразователь 12, преобразователь 13 Холла, токовые 14 и Холловые 15 электроды, Z-элемент 16, источник 17 питания, балансный резистор 18 и линия 19 связи, причем первый вход контроллера 4 преобразователя подключен к выходу сканирующего преобразователя 3 распределенного магнитного поля, второй к выходу масштабно-временного преобразователя 12, а третий к выходу приемника 11 преобразователя, первый выход контроллера 4 преобразователя подсоединен к входу сканирующего преобразователя 3 распределенного магнитного выходу сканирующего преобразователя 3 распределенного магнитного поля, второй к входу намагничивающего устройства 1, третий к входу передатчика 5 преобразователя, а четвертый к входу масштабно-временного преобразователя 12, первый вход контроллера 7 терминала подключен к выходу 9 управления, а второй к выходу приемника 6 терминала, последовательно связанного через линию 19 связи с передатчиком 10 преобразователя, первый выход к входу передатчика 10 терминала, последовательно связанного посредством линии 10 связи с приемником 11 преобразователя, второй выход к входу видеоконтрольного терминала 8, а масштабно-временной преобразователь 12 механически связан со сканирующим преобразователем 3 распределенного магнитного поля и намагничивающим устройством 1, элементы 13 Холла последовательно соединены токовыми электродами 15, Z-элементы 16 подключены анодом к положительному полюсу источника 17 питания, отрицательный полюс которого связан через балансный резистор 18 с катодом Z-элемента 16 и "землей".
Магнитный ортограф функционирует следующим образом.
Начало работы инициируется сигналом оператора, подаваемым с пульта 9 управления на вход контроллера 7 терминала. Далее этот сигнал передается в линию 19 связи передатчиком 10 терминала, принимается приемником 11 преобразователя, и выводит из состояния ожидания контроллер 4 преобразователя, который запускает намагничивающее устройство 1. Последнее создает в объеме объекта 2 контроллера магнитное поле намагничивания, в результате чего у его поверхности образуется некий магнитный рельеф, несущий информацию о внутренней структуре контролируемого объекта 2. Сформированный магнитный рельеф воздействует на магниточувствительные элементы сканирующего преобразователя 3 распределенного магнитного поля, которые по определенному алгоритму опрашиваются под управлением контроллера 4 преобразователя. При этом поле намагничивания возбуждает лишь в течение времени опроса магниточувствительных элементов преобразователя 3, что позволяет уменьшить суммарную мощность, потребляемую намагничивающим устройством 1.
Затем усиленные, отфильтрованные от помех и оцифрованные измерительные сигналы магниточувствительных элементов последовательно считываются контроллером 4 преобразователя и передаются в цифровых кодах через передатчик 5 преобразователя, линию 19 связи и приемник 6 терминала на вход контроллера 7 терминала, после чего передается на вход видеоконтрольного устройства 8 в виде последовательных или параллельных посылок (например в формате последовательного интерфейса RS-232C), где, в конечном счете, отображаются на электронно-лучевом, светодиодном или жидкокристаллическом экране в виде яркостной картины либо гистограмм, в зависимости от типа представления информации (двух или трехмерного).
В случае использования двухмерного отображения магнитного отпечатка по двум координатам откладываются геометрические координаты контролируемого магнитного поля, а его напряженность индицируется цветом или тоном, при трехмерном отображении по третьей координате откладывается напряженность магнитного поля.
Таким образом, на экране видеоконтрольного устройства 8 формируется отображение распределенного поверхности объекта 2 контроля магнитного поля рассеяния от дефектов.
Сканирование распределенного у поверхности объекта 2 контроля магнитного поля преобразователем 3 может быть осуществлено тремя основными способами:
1. Электронное сканирование. Для этого магниточувствительные элементы объединяются в матрицу M на N, где M-число элементов по координате X, а N по координате Y в плоскости, перпендикулярной плоскости объекта 2 контроля. В этом случае последовательность сигналов, считываемая контроллером 4 преобразователя, уже сама по себе несет информацию как о величине магнитного поля, так и о координатах X и Y точки, в которой это поле измерено.
2. Электронно-механическое сканирование. В этом случае магниточувствительные элементы объединены в одну строку. Поэтому код, поступающий на вход контроллера 4 преобразователя, несет информацию только о величине магнитного поля и одной из координат точки, в которой это поле определено. Вторая координата может быть получена с помощью масштабно-временного преобразователя 12, который, передвигаясь параллельно с магниточувствительными элементами сканирующего преобразователя 3 распределенного магнитного поля, дает возможность определить величину перемещения строки, запуская периодически, путем подачи строб-импульсов на контроллер 4 преобразователя, процесс сканирования магниточувствительных элементов.
3. Механическое сканирование, при котором используется только один магниточувствительный элемент, а информацию о координатах X и Y выдает масштабно-временной преобразователь (например по тому же принципу, на котором основан графический манипулятор типа "мышь").
При этом масштабно-временной преобразователь 12 является либо пассивным устройством, то есть перемещаемым оператором, либо активным, перемещаясь самостоятельно.
В первом случае в качестве масштабно-временного преобразователя целесообразно использовать перемещения в частоту импульсов. Тогда при перемещении устройства по какой-либо координате на заданную величину  или
или  масштабно-временной преобразователь будет стробировать контроллер 4 преобразователя.
масштабно-временной преобразователь будет стробировать контроллер 4 преобразователя.
Во втором случае перемещение масштабно-временного преобразователя 12, намагничивающего устройства 1 и магниточувствительных элементов производится под воздействием шагового электродвигателя, ротор которого механически связан с ведущей частью передвижного намагничивающего устройства 1. Тогда перемещением подвижной части устройства на заданную величину  или
или  и синхронным с ним опросом магниточувствительных элементов будет управлять контроллер 4 преобразователя.
и синхронным с ним опросом магниточувствительных элементов будет управлять контроллер 4 преобразователя.
Использование в качестве магниточувствительных элементов сканирующего преобразователя 3 магнитного поля элементов 13 Холла позволяет повысить чувствительность преобразователя, а, следовательно, уменьшить поле намагничивания, а также габаритные размеры и мощность потребления намагничивающего устройства 1. При этом коммутация элементов Холла должна быть организована таким образом, чтобы Холловские электроды 14 не имели общих точек, а токовые электроды 15 и схемы питания были гальванически развязаны с измерительными узлами.
Использование в качестве магниточувствительных элементов сканирующего преобразователя 3 магнитного поля Z-элементов 16 позволяет повысить и упростить конструкцию заявляемого устройства. Это достигается за счет того, что сигнал с выхода Z-элемента 16, частота которого зависит от величины воздействующего магнитного поля, без дополнительных преобразований поступает непосредственно на вход контроллера 4 преобразователя, который и осуществляет аналого-цифровое преобразование (преобразование частоты в код).
Источник 17 питания и балансный резистор 18, подключенные, как показано на фиг. 3, предназначены для вывода рабочей точки Z-элемента на оптимальный участок его характеристики.
При воздействии на Z-элемент 16 поля рассеяния от дефекта частота его выходного сигнала зависит от величины напряженности воздействующего поля и изменяется в пределах от сотен кГерц при H=0 до единиц кГерц при H=100 A/см. При этом амплитуда выходного сигнала Z-элемента 16 зависит от выходного напряжения источника 17 питания Z-элементов 16 и составляет 40-50% от него. То есть при использовании в качестве источника 17 питания Z-элемнта 16 9-вольтового гальванического элемента амплитуда выходного сигнала составляет порядка 4 B, поэтому данный сигнал может быть подан на вход контроллера 4 без дополнительных преобразований. Оцифровывается он контроллером 4 путем подсчета либо количества импульсов синхронизации контроллера 4 внутренним таймером-счетчиком за один период частоты выходного сигнала магниточувствительного элемента, либо самих импульсов его выходного сигнала за определенное время. Повышение помехоустойчивости при этом достигается за счет увеличения соотношения сигнал/шум, т.к. амплитуда помехи в цепи преобразователя не превышает 10 мВ, что на два порядка меньше амплитуды полезного сигнала.
Применение в качестве магниточувствительных элементов магниторезисторов либо магнитотранзисторов при работе с полями рассеяния от дефектов, лежащих в диапазоне от 10 до 120 A/см, позволяет уменьшить себестоимость сканирующего преобразователя распределенного магнитного поля по сравнению с преобразователями на основе датчиков Холла и Z-элементов в 2,5-3 раза.
Использование мостовой схемы включения магниторезисторов дает возможность за счет подбора компонентов моста снизить погрешность неидентичности до величины порядка 4-5% что в 2-3 ниже методической погрешности магнитного ортографа.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАГНИТНЫЙ ИНТРОСКОП ДЛЯ КОНТРОЛЯ ГАЗОПРОВОДОВ БЕЗ СНЯТИЯ ЗАЩИТНОЙ ИЗОЛЯЦИИ | 1998 |
|
RU2185616C2 |
| ЭЛЕКТРОННО-МЕХАНИЧЕСКИЙ МАГНИТНЫЙ ОРТОГРАФ | 1994 |
|
RU2115114C1 |
| МАГНИТНЫЙ ИНТРОСКОП ДЛЯ КОНТРОЛЯ ТРУБОПРОВОДОВ БЕЗ ВСКРЫТИЯ ГРУНТА | 2000 |
|
RU2187100C2 |
| Твердотельный преобразователь магнитных полей | 1980 |
|
SU894623A1 |
| Преобразователь магнитных полей | 1986 |
|
SU1379710A1 |
| Матричный преобразователь магнитных полей | 1980 |
|
SU907483A1 |
| Матричный преобразователь магнитных полей | 1979 |
|
SU859899A1 |
| Преобразователь магнитных полей | 1981 |
|
SU960686A1 |
| Матричный преобразователь магнитных полей к структуроскопу | 1979 |
|
SU859904A1 |
| Матричный преобразователь магнитных полей к структуроскопу | 1980 |
|
SU1037156A2 |
Использование: изобретение относится к контролю качества ферромагнитных изделий. Сущность: в ортограф введены контроллер 4 преобразователя, приемник 11 преобразователя, передатчик 10 терминала, контроллер 7 терминала, пульт 9 управления и масштабно-временной преобразователь 12, намагничивающее устройство выполнено в виде передвижного намагничивающего устройства на колесах, соединенного со сканирующим преобразователем 3 магнитного поля, а в качестве масштабно-временного преобразователя 12 использован либо шаговый электродвигатель, либо преобразователь перемещения в частоту импульсов, выход которого связан с входом контроллера 4 преобразователя. В качестве линии 19 связи использован либо атмосферный воздух, а передатчиков и приемников преобразователя и терминала - соответственно радиопередатчики, или радиоприемники, либо электропроводящий кабель. 10 з.п. ф-лы, 3 ил.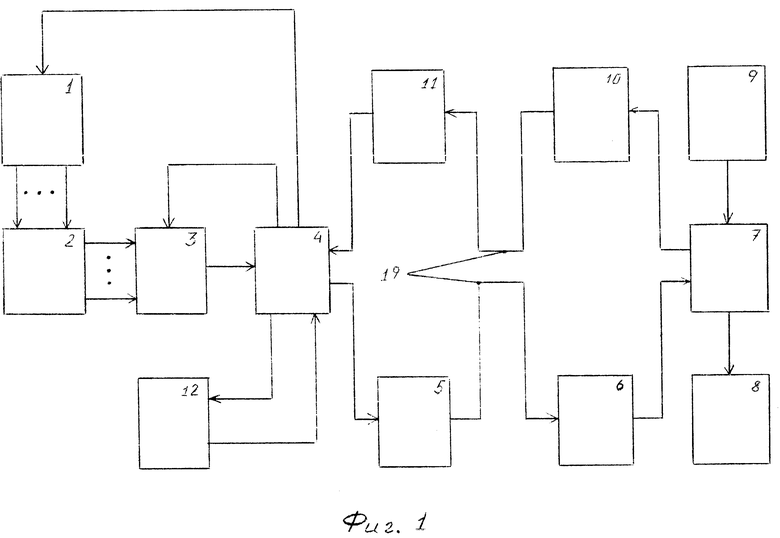
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| SU, авторское свидетельство СССР N 2006850, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| SU, авторское свидетельство СССР N 849865, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| SU, авторское свидетельство СССР N 1191812, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |

