Изобретение относится к вычислительной и информационно-измерительной технике и может быть использовано в системах сбора, регистрации и статистической обработки параметрической и речевой полетной информации в реальном времени в интересах безопасности полетов и повышения эффективности эксплуатации.
Известно устройство [1] для сбора и анализа данных о работе информационно-вычислительной системы, которое содержит блок управления записью в память, блок памяти магазинного типа, блок формирования управляющих сигналов, блок анализа данных и обеспечивает регистрацию качественных изменений параметров исследуемого процесса, немедленную выдачу их оператору, адаптацию к возможностям оператора воспринимать выводимый объем информации на заданное время.
Наиболее близким к изобретению по технической сущности является известное бортовое устройство [2], содержащее преобразователи аналоговых величин, преобразователи разовых команд, щиток распределительный, блок анализа УП-2, блок памяти МЛП-осн., блок управления ПУ-13, таймер ИТВ и распределительное устройство РУ-1.
Указанные устройства обладают рядом недостатков. Во-первых, документируемая информация не подготовлена для обобщенной оценки текущего состояния самолета в целом как объекта контроля непосредственно в полете; во-вторых, отсутствуют устройства оперативной обработки документируемой информации в интересах безопасности полетов и эффективности эксплуатации; в-третьих, полностью исключена возможность проведения межполетного анализа в процессе полета. Устройство [2] предполагает использование специализированной наземной аппаратуры типа "Луч-71", "Луч-74", Маяк-85МС [3]. Практическое использование полетной информации в воздухе в [2] не предполагается. Только на земле после посадки самолета полетная информация считывается с магнитного накопителя информации и по специальным алгоритмам обрабатывается. Таким образом, независимо от технического состояния самолета весь парк машины вынужден простаивать до окончания цикла проверки и формирования заключения о возможности выпуска в повторный вылет. При массированном использовании авиации это узкое место существенно увеличивает сроки на подготовку самолетов к повторному вылету и определяет критический путь в подготовке самолета. Самолеты, на которых по данным объективного контроля (например [3] аппаратуры "Маяк-85МС") обнаруживаются отказы оборудования, имевшие место в воздухе, вынуждены дополнительно простаивать без восстановления в очереди на получение заключения о своем состоянии.
Общим недостатком этих устройств [2] и [1] является низкая оперативность использования полетной информации в интересах безопасности полетов, оказания помощи экипажам, терпящим бедствие, сокращения сроков на подготовку самолета к повторному вылету, эффективности эксплуатации.
Предлагаемое устройство позволяет:
для исправных самолетов сократить время подготовки до времени, необходимого для проведения заправки самолета топливом и оснащения его средствами поражения или специальным оборудованием, грузами, спецоснасткой;
для отказавших в воздухе самолетов, по оперативному анализу представляется возможным сократить срок их восстановления за счет полученного запаса времени на предварительное диагностирование технического состояния в воздухе в реальной ситуации и времени. Практически для принятия решения на выпуск в очередной полет совершенно исправного самолета в прототипе [2] необходимо информацию, записанную в полете в блок памяти (МЛП-осн.), считать и проанализировать на предмет отсутствия команд, выдача которых в полете недопустима, отсутствия превышения допустимых ограничений по планеру, двигателю, самолетным системам, средствам поражения и оборудованию. Задача усложняется тем, что перечень указанных ограничений является функциями скорости полета, высоты, перегрузки, пространственного положения самолета (керн, тангаж, угол атаки, ...), количества оставшегося топлива, подвесок средств поражения, состоянием механизации крыла, тормозных щитков, шасси, и т.д. Для каждого типа л/а этот набор свой и он определен инструкцией летчику.
Указанные недостатки прототипа устраняются следующими отличительными признаками предлагаемого устройства.
Во-первых, пространство состояний л/а представляется как дискретный набор подпространств состояний систем, подсистем и устройств в реальных связях и времени в пространстве ситуаций, которые в свою очередь дискретно описываются в виде этапов полетов. Это позволяет более глубоко и детально видеть "Специфику" имеющего место отказа, его развитие и тенденцию. Этот факт вполне очевиден. Один и тот же отказ одного и того же устройства имеет разное влияние на выполнение задания в зависимости от всей совокупности признаков, определяющих качество ее выполнения с учетом всех действующих ограничений на летательный аппарат и его системы внешних и внутренних в реальном времени, включая безопасность полетов, применение средств поражения, преодоление средств ПВО, ..., пространственное положение самолета (высота, скорость, крен, тангаж, угол атаки, перегрузка,...), состояние двигателя, планера, самолетных систем, оборудования, реализуемый режим функционирования при фактическом состоянии всех систем, обеспечивающих данных режим. Чем глубже описана ситуация, тем с меньшей неоднозначностью можно ее оценить и с большей эффективностью распорядиться располагаемыми силами и средствами, а в критических ситуациях оптимально реализовать дефицит времени;
Во-вторых, система не только констатирует факт, например отказовой ситуации, но и дает инструкцию по действиям в ней с глубиной описания определенной по п. 1. В ситуациях определенных инструкций летчиков как "Особые случаи в полете" система дает ее обобщенную оценку на уровне принятия решения и выдает ее экипажу. Таким образом заложен алгоритм оценки отказовой ситуации в интересах безопасности полетов в воздухе. То есть, с одной стороны, используется алгоритм - классификатор состояния самолетных систем, который в соответствии с заложенным приоритетом из общего потока отказов выделяет особые случаи в полете. С другой стороны, поскольку сам характер "Особого случая. . ." и его течение зависят от целого комплекса факторов, динамически связанных между собой и во времени, то и инструкция экипажу отслеживает состояние и развитие "Особого случая в полете..." в реальном времени. При этом информация об отказах, угрожающих безопасности полетов, выдается в эфир через радиостанцию для информирования группы руководства полетами о ситуации на борту самолета и оказания ему помощи в виде подсказки по оперированию с арматурой в кабине или команд на целесообразные действия в интересах безопасности экипажа или его спасения;
В-третьих, при наличии ошибок в действиях экипажа по работе с арматурой в кабине система реализует подсказку. Таким образом заложен алгоритм оценки действия экипажа в интересах достижения потенциальной эффективности летательного аппарата в условиях эксплуатации.
В-четвертых, по информации, полученной с борта самолета с помощью использования мощных вычислительных средств на земле, представляется возможным проведение более глубокого анализа отказовой ситуации, сравнение текущей отказовой ситуации с банком статистик по нештатным ситуациям на борт самолета информации на предотвращение развития отказовой ситуации. Другой задачей наземного контура оперативной поддержки принимаемых решений по нештатным ситуациям является повышение эффективности эксплуатации летательного аппарата и его оборудования.
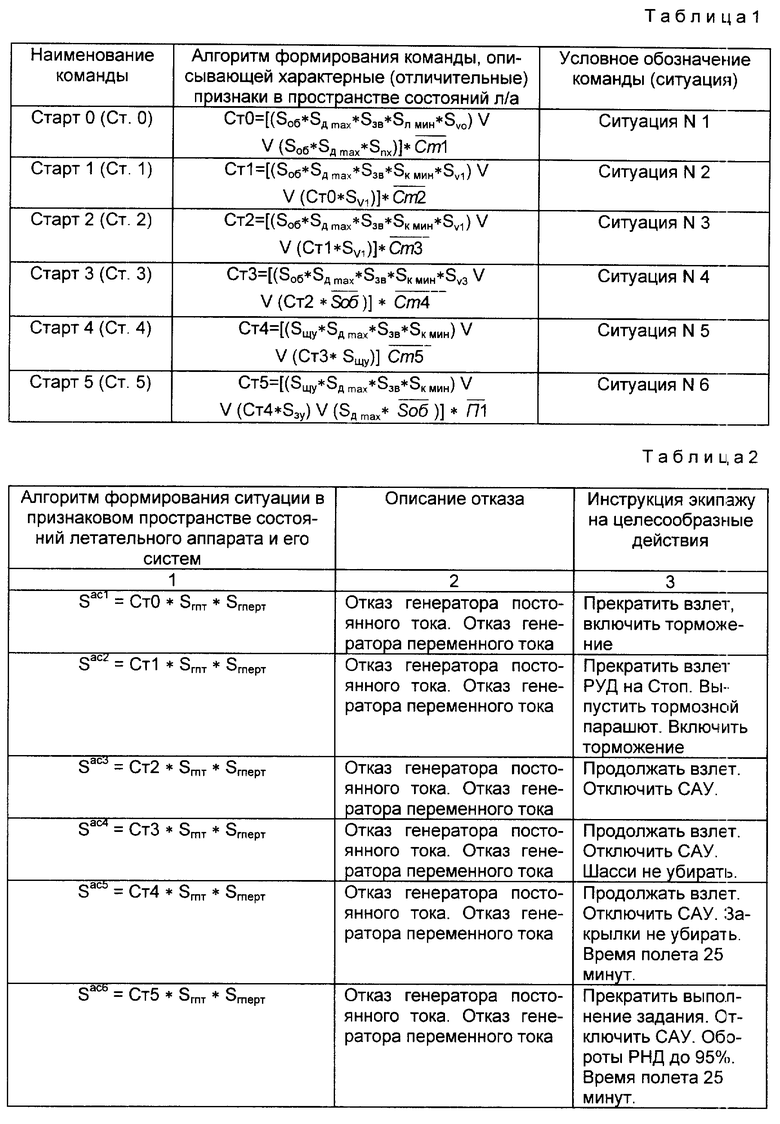
В варианте технической реализации это выполнено следующим образом. Три основных этапа любого полета "Взлет", "Полет", "Посадка" разбиваются на подэтапы. Глубина разбиения подэтапов выбирается из соображений исключить неоднозначность в принятии решения по ситуации и действиях экипажа в ней. Пример описания этапа "Взлет" и его характерных признаков применительно к гипотетическому самолету приведен в табл. 1,
где
Sоб,  соответственно - "Обжатие есть", "Обжатие нет". Команда "Обжатие есть" соответствует замкнутому положению выключателя основной стойки шасси. При отрыве самолета стойка основного шасси разгружается, амортизатор выходит, концевой выключатель размыкается - формируется команда "Обжатия нет".
соответственно - "Обжатие есть", "Обжатие нет". Команда "Обжатие есть" соответствует замкнутому положению выключателя основной стойки шасси. При отрыве самолета стойка основного шасси разгружается, амортизатор выходит, концевой выключатель размыкается - формируется команда "Обжатия нет".
При этом
Sдмакс - режим работы двигателя "Максимал";
Sзв - закрылки выпущены (взлетное положение);
Sзу - закрылки убраны;
Sкмин - стреловидность крыла минимальная; - приборная скорость самолета V0;
- приборная скорость самолета V0; - приборная скорость самолета V1;
- приборная скорость самолета V1; - приборная скорость самолета V2;
- приборная скорость самолета V2; - приборная скорость самолета V3;
- приборная скорость самолета V3;
Sшу - шасси убраны;
Snx - продольная перегрузка равна или более взлетной;
V, * - соответственно логические операции ИЛИ, И.
Ситуация 1. Экипаж может прекратить взлет и оставить самолет без повреждений.
Ситуация 2. Катапультироваться нельзя. Прекращение взлета при штатном БК и полной заправке опасно.
Ситуация 3. Катапультирование возможно. Прекращение взлета связано с поломками самолета.
Ситуация 4. Катапультирование возможно. Прекращать взлет нельзя - опасно для жизни экипажа.
Ситуация 5. Взлет. Шасси убраны. Катапультирование возможно.
Ситуация 6. Взлет. Шасси и закрылки убраны. Высота около 100 м. Переход этапа "Взлет" в этап "Полет" по первой команде этапа "Полет".
Пример описания Отказа генераторов постоянного и переменного тока в признаковом пространстве состояний л/а ОК дан в табл. 2.
Из примера, приведенного в табл. 2 видно, что один и тот же набор отказов, даже простейший, в признаковом пространстве состояний летательного аппарата и его систем требует от экипажа исключительного объема знаний. Чем сложнее ситуация (шире признаковое пространство отказов и состояний летательного аппарата), тем большим объемом знаний и практических навыков должен обладать экипаж. Учитывая ограниченность возможностей экипажа, в предлагаемой системе задача анализа ситуации возлагается на нее, оставляя за экипажем функции принятия решения;
В-четвертых, для дальнейшего повышения глубины описания отказа, дополнительно к описанному в табл. 1 и 2, устройство формирует код обобщенной отказовой ситуации (КООС) с учетом действующей системы ограничений на самолет и его системы в реальном масштабе времени. Летательные аппараты (л/а) сегодняшнего дня имеют тысячи ограничений по скорости, высоте,..., перегрузке в зависимости от величины заправки топливом, груза,..., количества, номенклатуры и точек подвесок средства поражения, конфигурации посадочных устройств, режимов работы силовой установки, и т.д. Полный перечень ограничений на каждый л/а сугубо специфический. В качестве примера полного перечня указанных ограничений на самолет типа 9-12, 9-13, 9-51 и его системы представлены в [4] . С учетом сказанных ограничений сущность алгоритма формирования КООС сводится к тому, что на признак отказа, определенный этапом (табл. 1 и 2) дополнительно накладывается признак ограничений независимо от причин их возникновения. При этом нарушения отдельных ограничений приводят просто к выводу оборудования из строя и не существенно влияют на безопасность полета. Например, взлет с выпущенными фарами и дальнейший полет без их уборки выводит их из строя и нарушает аэродинамические качества самолета. Невыполнение других ограничений создают реальные предпосылки к авариям и катастрофам. Например, полет с выпущенными шасси и посадочными устройствами на скоростях выше допустимых механически (скоростным напором воздуха) разрушает их и создает реальную угрозу катастрофы, делая невозможным посадку самолета. Аналогично превышение скорости или допустимой перегрузки для грузов на внешних подвесках, особенно средствах поражения. В этих случаях реально создается угроза безопасности полета [4]. Общий алгоритм формирования аналогично описанному а табл. 1 и 2 с добавлением члена, который учитывает ограничения для данной отказовой ситуации, выражение (1.1);
В-пятых, учет предыстории отказа. На общем фоне отказовой ситуации учет предыстории является существенным отличительным признаком, который позволяет детализировать отказовую ситуацию практически с любой глубиной предыстории. В предлагаемом устройстве в алгоритм формирования обобщенной отказовой ситуации дополнительно к указанным выше вводится еще один член, учитывающий предысторию отказовой ситуации на борту л/а в данной полете. В целом алгоритм определяется выражением
Sooc= Saci•S
где
Sooc - алгоритм формирования кода обобщенной отказовой ситуации,
Saci - алгоритм формирования кода отказовой ситуации (таб. 1 и 2);
S
S
Для пояснения использования признакового пространства предыстории в интересах решения задач безопасности полетов, возьмем команду "Масло", существующую практически во всех системах контроля двигателей. Выдача команды "Масло" связывается с масляным голоданием двигателя, и продолжительность ее выдачи существенно влияет на безопасность полетов, поэтому существенным является не только констатировать факт выдачи этой команды, но и отслеживать продолжительность ее выдачи за весь полет, безотносительно к моменту выдачи и периодичности ее.
Существенным является и проведение сравнения времени выдачи команды с нормами допуска на нее и как следствие формирование обобщенной ситуации по команде "Масло". Как результат вторичной обработки информации система формирует признак результатов обработки во внутренний контур - экипажу предупредительного сигнала "Внимание масло" и в эфир, "Опасно масло", когда суммарная выдача команды масло превышает установленные нормы. Это и составляет сущность алгоритма формирования предыстории для команды "Масло";
В-шестых, предлагаемая система обладает дополнительным преимуществом перед прототипом и при проведении глубоких наземных исследований с использованием информации аварийного запоминающего устройства, блока памяти речевой информации и наземных устройств ее обработки, заключающееся в том, что предлагаемая система записывает всю информацию, выдаваемую экипажу через цифровой синтезатор речи (ЦСР), и срабатывает код обобщенной отказовой ситуации в полете на землю, расширяя, таким образом, исходный объем информации для анализа и принятия решения. При этом главным отличием от прототипа является то, что эта информация "идет" с борта в реальном масштабе времени и документируется на земле.
В-седьмых, существенным отличительным признаком предлагаемого устройства от описанных выше является возможность непрерывной оценки текущего уровня безопасности полетов за счет непрерывного контакта с бортом самолета по отказовой ситуации и использования банка статистики по данному типу л/а за весь период его эксплуатации. В пределе представляется возможным по каждой ситуации в банке данных хранить полный достаточный набор рекомендаций на целесообразные действия всем категориям группы руководства полетами и экипажу с глубиной описания, обеспечивающей гарантированное предотвращение развития особого случая в полете.
При этом накопленный опыт эксплуатации будет непрерывно пополняться, обеспечивая все большую глубину и достоверность описания особых случаев в полете. С другой стороны, достоверное значение исходных признаков описания ситуации позволяет апроксимировать ход развития ситуации и действовать с опережением, не допуская переход особого случая в полете в неразрешимую ситуацию. Изложенный выше подход (наличие непрерывного технического канала связи самолета с землей по КООС и банка данных на земле в оперативном пользовании по КООС) открывает практически неограниченные возможности по формированию прогноза развития отказовой ситуации. В предлагаемом устройстве предусматривается формирование прогноза особого случая в полете на каждом шаге обмена информации по КООС между бортом самолета и землей. Учитывая непрерывность обмена информацией Борт-КООС - Земля-Прогноз, в целом каждый последующий шаг расширяет признаковое пространство описания КООС и сужает признаковое пространство неопределенности в развитии отказовой ситуации. В пределе Прогноз достоверно определяет КООС и, как следствие, однозначно описывает действия экипажу на предотвращение развития отказовой ситуации.
Этот существенный отличительный признак от прототипа [2] обеспечивает повышение текущего уровня безопасности полета. С учетом этого члена (S
где
S
В-восьмых, учитывая, тот факт что сегодня полеты выполняются по строго установленным маршрутам, зонам и эшелонам и абсолютное большинство упражнений полетных заданий конкретизируются по скоростям, высотам, перегрузкам, параметрам работы силовой установки и самолетных систем, то представляется возможным формализовать все пространство ограничений, за пределы которого выход не допустим либо из соображений безопасности полетов, либо эффективности эксплуатации. Применение формализованного описания системы ограничений в совокупности со статической (весовой) характеристикой значимости выхода за пределы ограничений делает возможным осуществление контроля не только за текущим уровнем безопасности полета но и эффективностью практического применения летательного аппарата. Таким образом, решается задача повышения эффективности эксплуатации летательного аппарата.
Цель изобретения - расширение функциональных возможностей в интересах безопасности и эффективности эксплуатации.
Цель достигается тем, что в известное устройство [2] сбора и регистрации полетной информации, содержащее блок анализа, блок памяти, блок управления и таймер дополнительно включены мультиплексор, синтезатор речи, коммутатор, блок распределения информационных потоков, блок ввода речевой информации, второй блок памяти, передатчик первого канала бортовой радиостанции, приемник первого канала бортовой радиостанции, передатчик второго канала бортовой радиостанции, приемник второго канала бортовой радиостанции, первый декодер, первый кодер, логический элемент ИЛИ, передатчик первого канала наземной радиостанции, приемник первого канала наземной радиостанции, передатчик второго канала наземной радиостанции, приемник второго канала наземной радиостанции, второй декодер, второй кодер. При этом первой группой информационных входов устройства является первая группа информационных входов мультиплексора, второй группой информационных входов которого является первый выход таймера, подключенный к информационному входу коммутатора, управляющий вход которого подключен к первому выходу блока управления, вход запуска которого подключен к второму выходу таймера, второй выход блока управления соединен с управляющим входом мультиплексора, выход которого соединен с информационным входом первого блока памяти, первый управляющий вход которого соединен с третьим выходом блока управления, четвертый выход которого соединен с первым управляющим входом блока распределения информационных потоков, первый и второй информационные входы которого соединены с одноименными выходами первого блока памяти, третий выход которого подключен к входу синтезатора речи, выход готовности которого соединен с вторым управляющим входом первого блока памяти, соответствующий разряд третьего выхода первого блока памяти соединен с входом включения передатчика первого канала бортовой радиостанции, выход приемника которого соединен с первым входом логического элемента "ИЛИ", второй вход которого соединен с информационным выходом синтезатора речи, подключенному к первому информационному входу второго блока памяти и информационному входу передатчика первого канала бортовой радиостанции, выход приемника второго канала бортовой радиостанции через первый декодер соединен с вторым управляющим входом блока распределения информационных потоков, выход которого соединен с информационным входом первого кодера, вход синхронизации которого соединен с пятым выходом блока управления, выход первого кодера соединен с входом передатчика второго канала бортовой радиостанции, выход коммутатора соединен с управляющим входом второго блока памяти, второй информационный вход которого соединен с выходом блока ввода речевой информации, выход приемника первого канала наземной радиостанции соединен с первым информационным входом блока анализа, первый выход блока анализа соединен с входом передатчика первого канала наземной радиостанции, выход приемника второго канала наземной радиостанции, через второй декодер подключен к второму информационному входу блока анализа, второй выход которого через второй кодер соединен с входом передатчика второго канала наземной радиостанции.
На фиг. 1 показана структурная схема предлагаемого устройства; на фиг. 2 - структурная схема мультиплексора 1; на фиг. 3 - структурная схема блока 2 управления; на фиг. 4 - структурная схема первого блока 3 памяти; на фиг. 5 - структурная схема блока 4 таймер; на фиг. 6 - структурная схема блока 6 ввода речевой информации; на фиг. 7 - структурная схема коммутатора 7; на фиг. 8 - структурная схема второго блока 8 памяти; на фиг. 9 - структурная схема блока 9 распределения информационных потоков; на фиг. 10 - структурная схема блока 10 анализа; на фиг. 11 - структурная схема блока 37 учета предыстории; на фиг. 12 - структурная схема блока 44 эксплуатационного ЭРПЗУ; на фиг. 13-17 - общий алгоритм работы блока анализа; на фиг. 18 - алгоритм парирования "Отказа управления носками крыла в режиме Автомат"; на фиг. 19 - алгоритм парирования ситуации "Скорость более 700 км/ч при выпущенных шасси"; на фиг. 20 - алгоритм парирования ситуации "Число М более 0,9 на высоте менее 3000 м при варианте подвески N2".
Устройство содержит мультиплексор 1, блок 2 управления, блоки 3, 8 памяти, таймер 4, синтезатор речи 5, блок ввода речевой информации 6, коммутатор 7, блок 9 распределения информационных потоков, блок 10 анализа, передатчик 11 первого канала бортовой радиостанции, приемник 12 первого канала бортовой радиостанции, приемник 13 второго канала бортовой радиостанции, передатчик 14 второго канала бортовой радиостанции, приемник 15 первого канала наземной радиостанции, передатчик 16 первого канала наземной радиостанции, приемник 17 второго канала наземной радиостанции, передатчик 18 второго канала наземной радиостанции, первый декодер 19, первый кодер 20, второй декодер 21, второй кодер 22, элемент 23 ИЛИ.
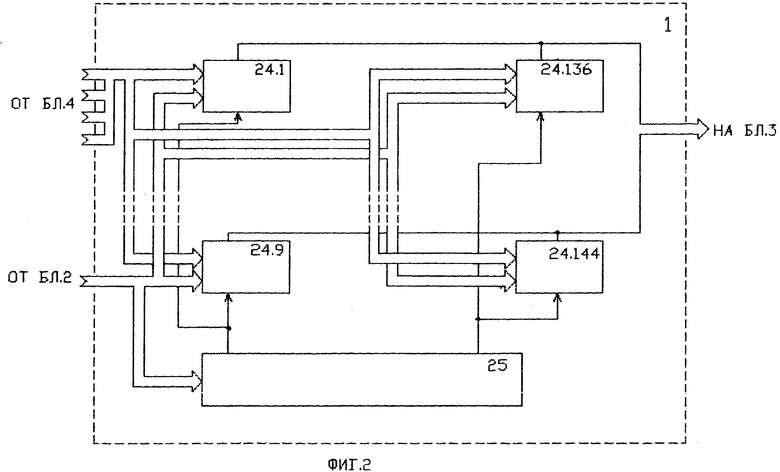
Мультиплексор 1 (фиг. 2) содержит 16 групп мультиплексоров по 9 мультиплексоров в каждой группе - мультиплексоры 24.1,...,24.144 опроса датчиков, дешифратор 25 выбора мультиплексоров.
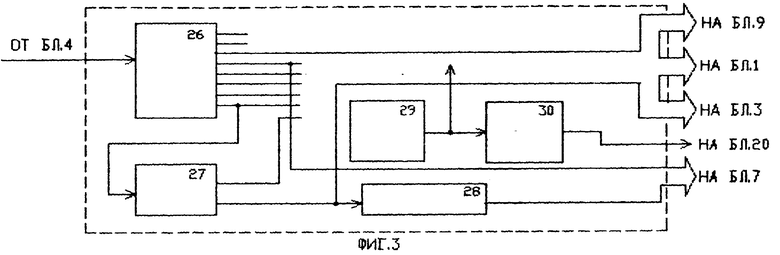
Блок 2 управления (фиг. 3) содержит первый счетчик 26 делителя, второй счетчик 27 делителя, одновибратор 28 блока управления, задающий генератор 29 блока управления, делитель 30 частоты блока управления.
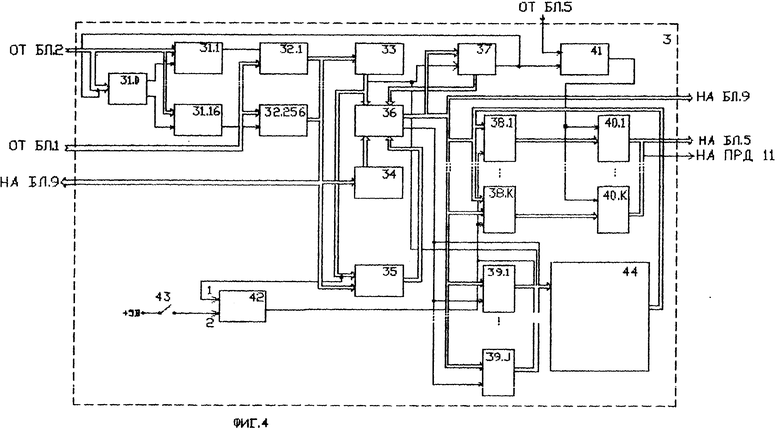
Первый блок 3 памяти (фиг. 4) содержит дешифратор 31.0 выбора дешифраторов, дешифраторы 31.1,...,31.16 выбора регистра входной информации, блок 33 формирования кода этапа полета (БФКЭП), блок 34 формирования кода отказовой ситуации (БФКОС), блок 35 ограничений (БО), блок 36 формирования кода обобщенной отказовой ситуации (БФКООС), блок 37 учета предыстории (БУП), мультиплексоры 38.1,...,38.К оперативного анализа, регистры 39.1,...39.J оперативного анализа, регистры 40.1,...40.K фиксации кода обобщенной отказовой ситуации (КООС), элемент 41 И оперативного анализа, элемент 42 ИЛИ оперативного анализа, кнопку 43 "Сброс КООС", блок 44 эксплуатационного репрограммируемого постоянного запоминающего устройства (ЭРПЗУ).
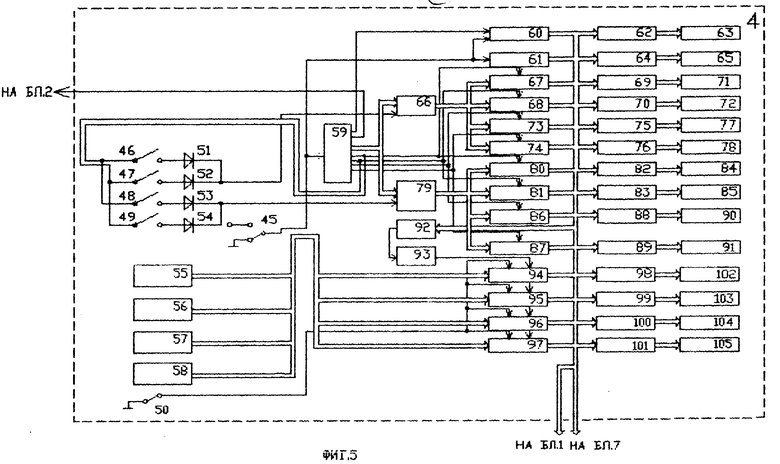
Блок 4 таймер (фиг. 5) содержит кнопку 45 "Установки секунд", 46 "Установки минут", 47 "Установки часов", 48 "Установки дней", 49 "Установки месяцев", 50 "Занесение времени", диоды 51 "Установки минут", 52 "Установки часов", 53 "Установки дней", 54 "Установки месяцев", наборные устройства 55 единиц лет, 56 десятков лет, 57 сотен лет, 58 тыс. лет, задающий генератор 59 импульсов, счетчик 60 единиц секунд, счетчик 61 десятков секунд, дешифратор 62 секунд, индикатор 63 секунд, дешифратор 64 десятков секунд, индикатор 65 десятков секунд, счетчик 66 минут и часов, регистры 67 единиц минут и 68 десятков минут, дешифраторы 69 единиц минут и 70 десятков минут, индикаторы 71 единиц минут и 72 десятков минут, регистры 73 единиц часов и 74 десятков часов, дешифраторы 75 единиц часов и 76 десятков часов, индикаторы 77 единиц часов и 78 десятков часов, счетчик 79 дней и месяцев, регистры 80 единиц дней и 81 десятков дней, дешифраторы 82 единиц дней и 83 десятков дней, индикаторы 84 единиц дней и 85 десятков дней, регистры 86 единиц месяцев и 87 десятков месяцев, дешифраторы 88 единиц месяцев и 89 десятков месяцев, индикаторы 90 единиц месяцев и 91 десятков месяцев, первый элемент И 92 переноса года, одновибратор 93 переноса года, счетчики 94 единиц лет, 95 десятков лет, 96 сотен лет, 97 тысяч лет, дешифраторы 98 единиц лет, 99 десятков лет, 100 сотен лет, 101 тысяч лет, индикаторы 102 единиц лет, 103 десятков лет, 104 сотен лет, 105 тысяч лет.
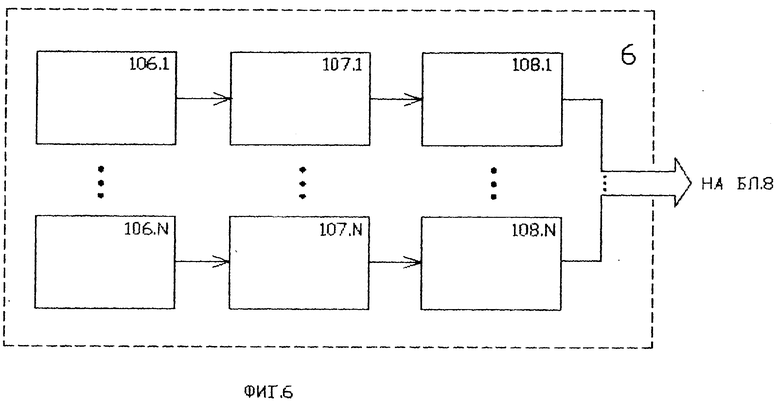
Блок 6 ввода речевой информации (фиг. 6) содержит микрофоны 106.1,... 106.N, предварительные усилители 107.1,...,107.N, фильтры 108.1,...108.N.
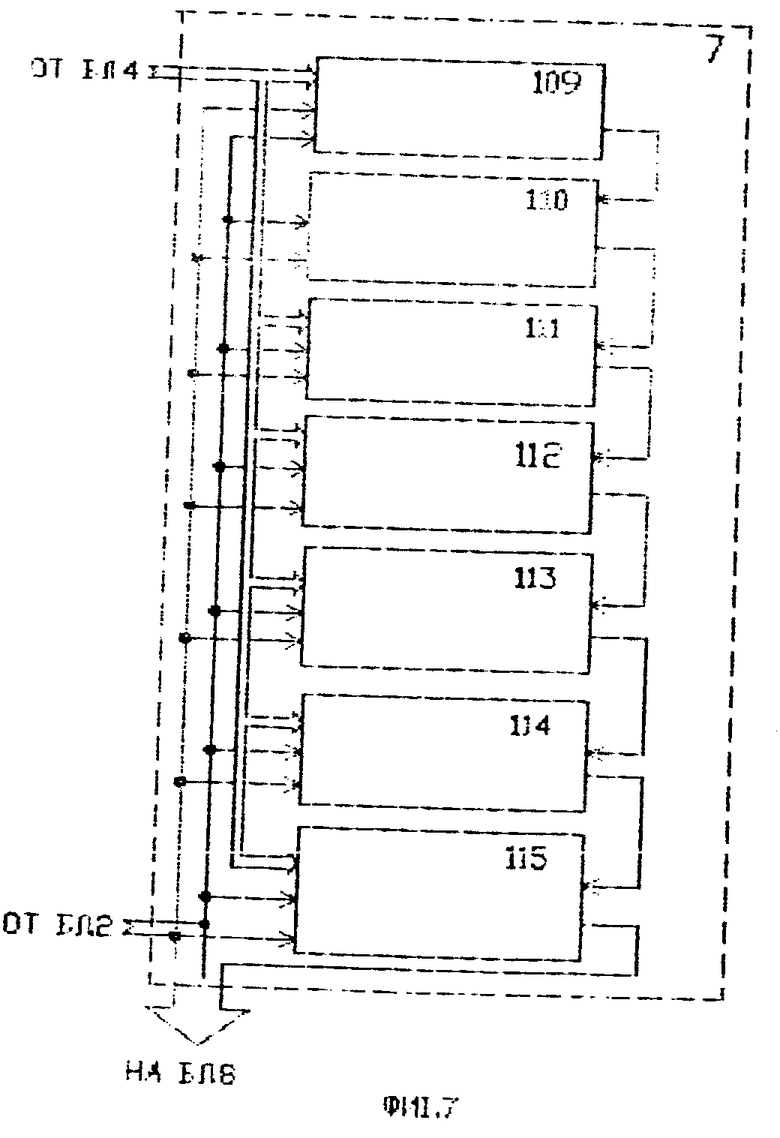
Блок 7 коммутатор (фиг. 7) содержит регистры 109 тысяч и сотен лет, 110 десятков и единиц лет, 111 десятков и единиц месяцев, 112 десятков и единиц дней, 113 десятков и единиц часов, 114 десятков и единиц минут, 115 десятков и единиц секунд.
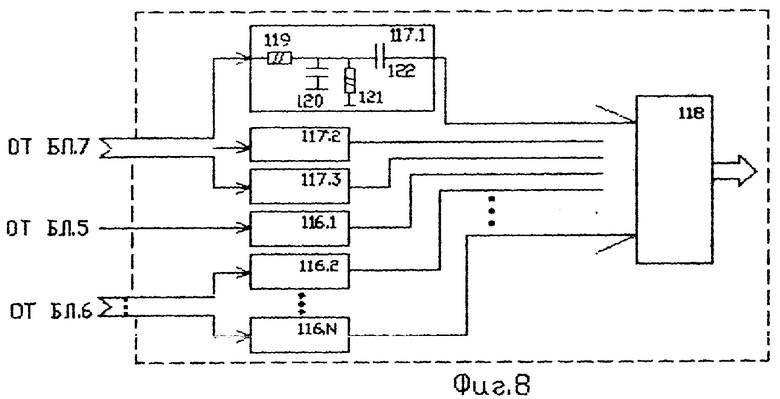
Второй блок 8 памяти (фиг. 8) содержит блоки 116.1,...,116.N усилитель записи аналоговых сигналов, блоки 117.1,...,117.3 сопряжения цифровой информации (БСЦИ) с входом аналогового магнитофона 118, первый резистор 119 БСЦИ, первый конденсатор 120 БСЦИ, второй резистор 121 БСЦИ, второй конденсатор 122 БСЦИ.
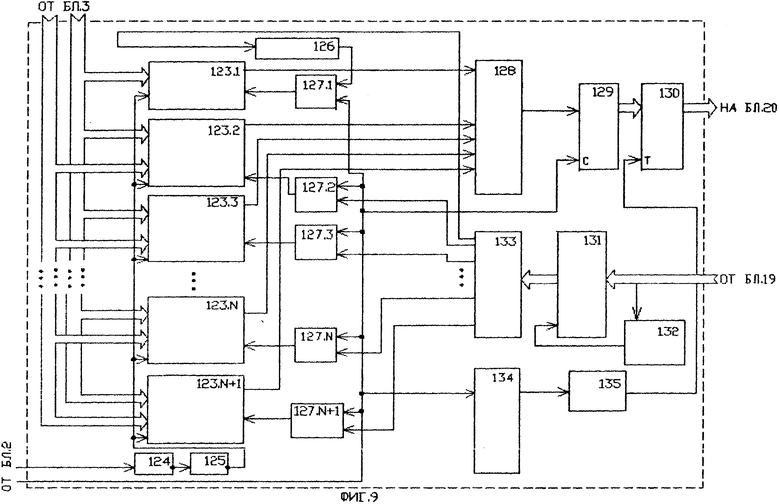
Блок 9 распределения информационных потоков - БРИП (блок мультиплексирования). БРИП (фиг. 9) содержит регистры 123.1,...,123.N+1 КООС, первый элемент 124 НЕ БРИП, второй элемент 125 НЕ БРИП, первый одновибратор 126 БРИП, элементы 127.1,...,127. N+1 И БРИП, элемент 128 ИЛИ БРИП, регистр 129 буфера БРИП, регистр 130 выхода БРИП, регистр-защелка 131 запроса, второй одновибратор 132 БРИП, дешифратор 133 запроса, счетчик 134 цикла записи БРИП, третий одновибратор 135 БРИП.
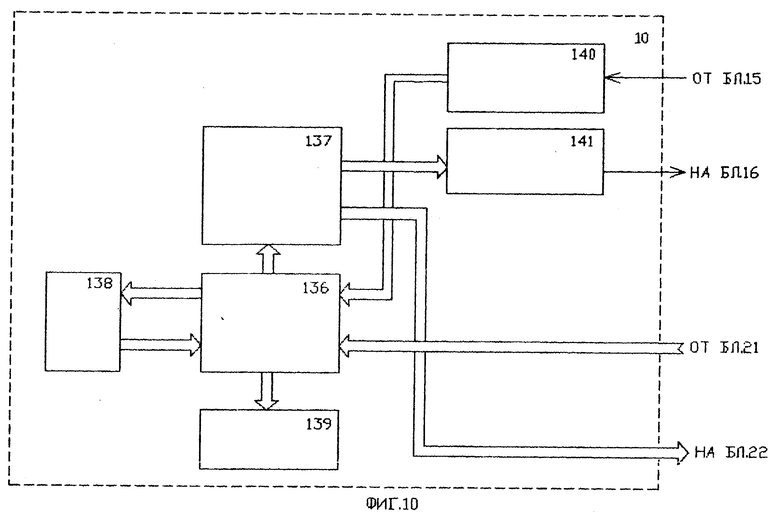
Блок 10 анализа (фиг. 10) содержит блок 136 статистической обработки, служащий для определения функции взаимной корреляции, блок 137 формирования приоритетов, банк 138 данных, блок 139 отображения визуальной информации, блок 140 распознавания речи, синтезатор 141 речи.
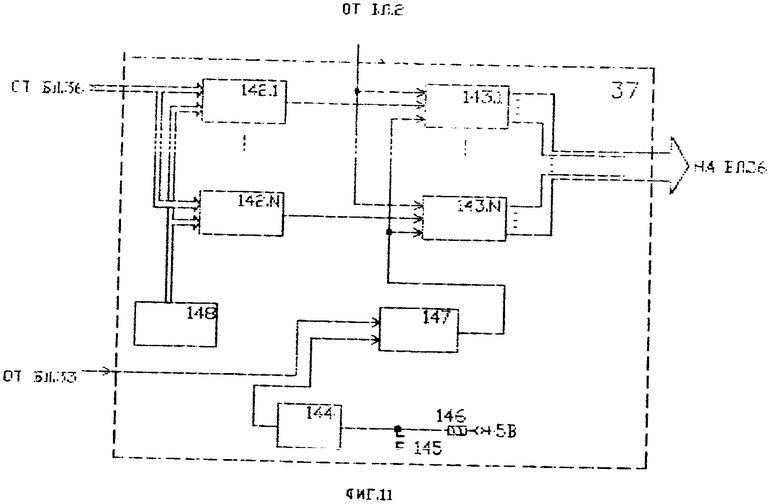
Блок 37 учета предыстории (БУП), (фиг. 11) содержит схемы 142.1,...,142. N сравнения БУП, счетчики 143.1,...143.N БУП, одновибратор 144 начальной установки БУП, конденсатор 145 БУП, резистор 146 БУП, элемент 147 ИЛИ БУП, блок 148 установки кодов сравнения БУП.
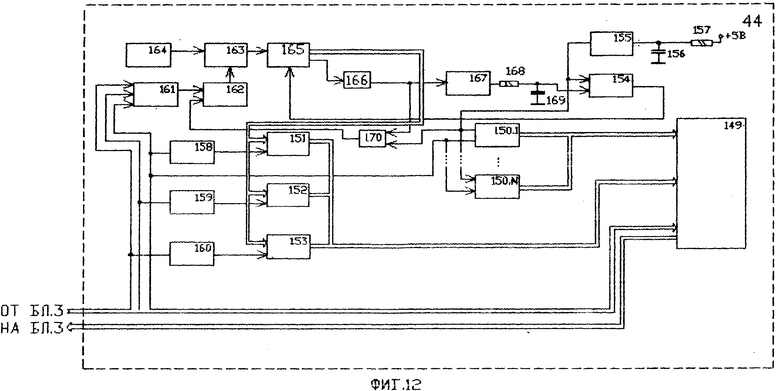
Блок 44 эксплуатационного репрограммируемого постоянного запоминающего устройства (БЭРПЗУ) (фиг. 12) содержит блок 149 РПЗУ, счетчики 150.1,...150. N адресов РПЗУ, постоянное запоминающее устройство (ПЗУ) 151 записи ЭРПЗУ, ПЗУ 152 чтения ЭРПЗУ, ПЗУ 153 стирания ЭРПЗУ, первый элемент 154 ИЛИ ЭРПЗУ, одновибратор 155 начальной установки ЭРПЗУ, первый конденсатор 156 ЭРПЗУ, первый резистор 157 ЭРПЗУ, одновибратор 158 записи ЭРПЗУ, одновибратор 159 чтения ЭРПЗУ, одновибратор 160 стирания ЭРПЗУ, второй элемент 161 ИЛИ ЭРПЗУ, триггер 162 ЭРПЗУ, элемент 163 И ЭРПЗУ, генератор 164 тактовых импульсов ЭРПЗУ, счетчик 165 программ ЭРПЗУ, элемент 166 НЕ ЭРПЗУ, одновибратор 167 обнуления счетчика программ, второй резистор 168 ЭРПЗУ, второй конденсатор 169 ЭРПЗУ, третий элемент ИЛИ 170 ЭРПЗУ.
Устройство работает следующим образом.
Вся информация о пространственном положении самолета первичная - крен, тангаж, скорость, высота, угол атаки, перегрузка в горизонтальной и вертикальной плоскостях, угол скольжения - состоянии управляющих (рулевых) поверхностей, механизацией крыла, посадочных устройств, органов управления системами, устройствами, ..., информация об индексе летчика, о бортовом номере самолета,..., положение органов управления в кабине в целом, о техническом состоянии всех систем, наделенных встроенными системами контроля (ВСК), поступает в одной из четырех возможных форм на соответствующие группы входов мультиплексора 1.
Блок 1 мультиплексор (фиг. 2) обеспечивает последовательный опрос датчиков исходной информации. Вся информация с групп входов параметрической информации, а также текущее время от таймера 4 поступает на входы мультиплексоров 24.1,...,24.144 опроса датчиков. Управление мультиплексорами осуществляется сигналами от блока 2 управления непосредственно и через дешифратор 25 выбора мультиплексоров. Непосредственно выбираются по одному входу каждого мультиплексора 24.1,...,24.144 опроса датчиков, сигналами А0,...,А3. А с помощью дешифратора 25 выбора мультиплексоров выбирается один из 16 столбцов. Управление дешифратором осуществляется сигналами старших разрядов А4, . ..,А7. Последовательный перебор управляющих сигналов А0,...А7 блоком 2 управления обеспечивает опрос всех датчиков. Частота опроса датчиков определяется блоком 2 управления и составляет 1Гц. В качестве мультиплексоров 24.1, . ..,24.144 опроса датчиков используется известная ИМС 133 КП1, [5, с. 78] . В качестве дешифратора 25 выбора мультиплексоров - известная ИМС 133 ИД3, [5]. Сигналы с выхода блока 1 мультиплексора поступают на первый блок 3 памяти.
Блок 2 управления (фиг. 3) предназначен для формирования управляющих сигналов. В качестве опорного используется сигнал с блока 4 таймера частотой 1024 Гц. Из этого сигнала первым счетчиком 26 делителя и вторым счетчиком 27 делителя формируются управляющие сигналы 1, 2, 4, 8, 16, 32, 64, 128, 256 Гц. Сигналы частоты 1, 2, 4, 8, 16, 32, 64, 128 Гц используются для перебора адресов А0, . . . ,А7 для блока 1 мультиплексора (А0,...,А3 младшие адреса, соответственно 128, 64, 32, 16 Гц; А4,...,А7 старшие адреса, соответственно 8, 4, 2, 1 Гц) и для первого блока 3 памяти. Сигнал частоты 64 Гц, в качестве тактового импульса (ТИ) поступают на блок 7 коммутатора. Сигнал частоты 1 Гц, поступает на одновибратор 28 блока управления и запускает его передним фронтом. Одновибратор формирует импульс заданной длительности, который поступает на коммутатор 7 в качестве импульса начала кадра (ИНК). Задающий генератор 29 формирует прямоугольные импульсы с частотой 4800 Гц, которые поступают на блок 9 распределения информационных поток и на делитель 30 частоты блока 2 управления, с выхода которого импульсы с частотой следования 1200 Гц поступают на первый бортовой кодер 20. На блок 9 распределения информационных потоков поступает также импульсы частотой 1 Гц с выхода второго счетчика 27 блока управления. В качестве первого счетчика 26 делителя, второго счетчика 27 делителя и делителя частоты 30 используется известная ИМС 564 ИЕ10, [6], в качестве одновибратора 28 блока управления используется известная ИМС 155 АГ1, [5]. В качестве задающего генератора 29 используется известная схема "регулируемого генератора" [7].
Первый блок 3 памяти (фиг. 9). Для записи информации, поступающей от блока 1 мультиплексора на вход блока 3, используются управляющие сигналы от блока 2 управления. В качестве примера используется 8-разрядная шина. При этом младшие адреса А0, . ..,А3 поступают на все шестнадцать дешифраторов 33.1, . . . ,33.16 выбора регистра входной информации параллельно, а старшие адреса А4, . . .,А7 поступают на дешифратор 31.0 выбора дешифраторов. Таким образом сигналы управления А0,...,А7 однозначно определяют регистр для каждой категории поступающей информации с блока 1 мультиплексора. Информация с блока 1 мультиплексора о бортовом номере самолета, индексе летчика, текущем времени, полетной информации (скорость, курс, высота, перегрузка, крен, тангаж, . . . ), информация о состоянии самолетных систем (системе автоматического управления самолетом - САУ, гидросистемы - основной, бустерной, воздушной, кислородной подпитки, системы управления оружием, топливной,...), силовой установки,... оборудовании летательного аппарата, состоянии органов управления кабины самолета, посадочных устройств и т.д. поступает на входы регистров 32.1,...,32.256 входной информации и фиксируется в соответствующем регистре. Обновление информации в регистрах происходит с частотой 1Гц и обеспечивается блоком 2 управления. В качестве дешифратора 31.0 выбора дешифраторов и дешифраторов 31.1,...,31.16 выбора регистра входной информации используется известная ИМС типа 133 ИД3, [5]. В качестве регистров 32.1,..., 32.256 входной информации используются известные ИМС типа 564 ИР9, [6]. Для получения нужного числа разрядов используется по три схемы на каждый регистр. Информация, необходимая для формирования кодовой ситуации с выходов регистров 32.1,...,32.256, поступает на вход блока 33 формирования кода этапа полета (БФКЭП), на блок 34 формирования кода отказовой ситуации (БФКООС), на блок 35 ограничений (БО) и на блок 9 распределения информационных потоков.
Блок 33 БФКЭП (фиг. 4) представляет собой постоянное запоминающее устройство (ПЗУ). При этом входная информация поступает на адресные входы ПЗУ, а с выходов данных снимается код, соответствующей этапу полета. Таким образом, при изменении любого входного воздействия (адреса) обеспечивается выбор другой ячейки данных и соответственно изменение выходного кода или оставление его прежним в зависимости от карты прошивки данного ПЗУ. Пример формирования кода этапа полета описан выше (см. описание к табл. 1 и 2). Код этапа полета с выхода блока 33 поступает на вход блока 36 формирования кода обобщенной отказовой ситуации (БФКООС), на блок 35 ограничений, на первый вход элемента 42 ИЛИ, на второй вход блока 37 учета предыстории (БУП) и на вход блока 44 эксплуатационного репрограммируемого постоянного запоминающего устройства (ЭРПЗУ). В качестве ПЗУ блока 33 БФКЭП используются известные ИМС типа 573 РФ4 [5]. Для реализации требуемого объема адресного пространства указанные микросхемы соединяются каскадно.
Блок 34 формирования кода отказовой ситуации (БФКОС) (фиг. 4) представляет собой постоянное запоминающее устройство (ПЗУ). При этом входная информация, представляющая собой код отказа соответствующей системы, блока или устройства, поступает на адресные входы ПЗУ, а с выходов данных снимает код, соответствующий отказовой ситуации.
Таким образом, при изменении любого входного воздействия (адреса) обеспечивается выбор другой ячейки данных и соответственно изменение выходного кода или оставление его прежним в зависимости от карты прошивки данного ПЗУ. Пример формирования кода отказовой ситуации описан выше (см. описание к табл. 1 и 2). В качестве ПЗУ блока 34 БФКОС используются известные ИМС типа 573 РФ4 [5] . Для реализации требуемого объема адресного пространства указанные микросхемы соединяются каскадно.
Блок 35 ограничений (БО) (фиг. 4) представляет собой постоянное запоминающее устройство (ПЗУ). При этом входная информация регистров 32.1,..., 32.256 входной информации, представляющая собой коды систем, на которые налагаются ограничения по применению в зависимости от этапа полета (например, системы вооружения, топливная система, шасси, механизация крыла,...), а также код этапа полета с выхода блока 33 БФКЭП поступает на адресные входы ПЗУ, а с выходов данных блока 35 (БО) снимается обобщенный код системы, имеющих ограничения по применению с учетом этапа полета. Таким образом, при изменении любого входного воздействия (адреса) обеспечивается выбор другой ячейки данных и соответственно изменение выходного кода или оставление его прежним в зависимости от карты прошивки данного ПЗУ. В качестве ПЗУ блока 35 БО используются известные ИМС типа 573 РФ4 [5]. Для реализации требуемого объема адресного пространства указанные микросхемы соединяются каскадно.
Блок 36 формирования кода обобщенной отказовой ситуации (БФКООС) (фиг. 4) представляет собой ПЗУ, при этом входная информация с выходов блока 33 БФКЭП, блока 34 БФКОС, блока 35 БО и блока 37 учета предыстории (БУП) поступает на адресные входы ПЗУ, а с выходов данных БФКООС снимается обобщенный код отказовой ситуации, учитывающий этап полета, отказы систем, ограничения, накладываемые на них, и предысторию обобщенной отказовой ситуации.
Таким образом, при изменении любого входного воздействия (адреса) обеспечивается выбор другой ячейки данных и соответственно изменение выходного кода или сохранение его прежним в зависимости от карты прошивки данного ПЗУ. Код обобщенной отказовой ситуации формируется в соответствии с выражением (1.2) и прошивается в ПЗУ БФКООС на этапе изготовления системы.
Таким образом, в конце полета будет сформирован код обобщенной отказовой ситуации, соответствующий моменту окончания полета, и если за весь полет отказов не было, то на выходе блока 36 БФКООС присутствует код исправного состояния самолета. В качестве ПЗУ блока 36 БФКООС используются известные ИМС типа 573 РФ4 [5] . Для реализации требуемого объема адресного пространства указанные микросхемы соединяются каскадно.
Блок 37 учета предыстории (БУП) и блок эксплуатационного репрограммируемого ПЗУ (БЭРПЗУ) представлены на фиг. 11 и 12 соответственно и описаны ниже.
Мультиплексоры 38.1,...,38.К первого блока 3 памяти (фиг. 4) обеспечивают прохождение кода обобщенной отказовой ситуации (КООС) на синтезатор 5 речи через регистры 41.1,...,40.К фиксации КООС. Регистры 39.1,...39.J оперативного анализа фиксируют КООС для записи в блок 44 ЭРПЗУ. В зависимости от наличия управляющего сигнала, подаваемого с выхода элемента 42 ИЛИ, обеспечивается прохождение КООС либо от блока 44 ЭРПЗУ, либо от блока 36 БФКООС. Так, при подаче сигнала уровня логической единицы на управляющие входы мультиплексоров 38.1,...38.К обеспечивается прохождение кода от блока 44 ЭРПЗУ, а при подаче логического ноля - прохождение кода от блока 36 БФКООС. Логическая единица на выходе элемента 42 ИЛИ формируется в случае нажатия кнопки 43 Сброс кода обобщенной отказовой ситуации ("Сброс КООС"), либо при формировании команды "Посадка L". Команда "Посадка L" формируется при пробеге самолета по взлетно-посадочной полосе после посадки при обжатии основной стойки шасси (см. пояснения к табл. 1). Код обобщенной отказовой ситуации с выхода мультиплексоров 38.1,...,38.К подается на входы регистров 40.1,...,40.К фиксации кода обобщенной отказовой ситуации (КООС), на входы записи которых поступает управляющий сигнал с выхода логического элемента 41 И, который обеспечивает запись информации в регистры 40.1,...,40.К фиксации КООС с частотой в 1Гц при отсутствии сигнала "Занято" с синтезатора 5 речи. Тактовые импульсы с частотой в 1 Гц поступают на первый вход элемента 41 И, на второй вход этого элемента подается сигнал "Занято" от синтезатора 5 речи. Если сигнал "Занято" активен, т.е. имеет уровень логического нуля, то прохождение тактовых импульсов через логический элемент 41 И и соответственно запись в регистры 40.1,...,40.К очередного кода запрещается, вплоть до перехода сигнала "Занято" от синтезатора 5 речи в пассивное состояние (уровень логической единицы). В состав кода обобщенной отказовой ситуации входит признак включения передатчика 11 первого канала бортовой радиостанции на передачу - сигнала "передача", который подается на включение передатчика 11 и обеспечивает перевод радиостанции в режим передачи. Таким образом в обоих случаях как при нажатии кнопки 43 "Сброс КООС", так и при поступлении команды "Посадка L" обеспечивается сброс кода обобщенной отказовой ситуации через передатчик 11 первого канала бортовой радиостанции на приемник 15 первого канала наземной радиостанции. Этим достигается оперативность в получении заключения о техническом состоянии самолета, совершившего посадку (команда "Посадка L"), или по запросу от группы руководства полетами на любом этапе полета (нажатие кнопки 517 "Сброс КООС" летчиком).
Регистры 39.1,...,39.J (Фиг. 4) служат для фиксации кода обобщенной ситуации (КООС), подлежащей записи в блок 44 ЭРПЗУ. Фиксация обеспечивается сигналом "Запись ЭРПЗУ", поступающему от блока 36 БФКООС. На регистры 39.1,. ..,39.J поступает код обобщенной отказовой ситуации с временной привязкой. С выхода регистров 39.1,...,39.J информация поступает в блок 44 ЭРПЗУ для записи и хранения.
В качестве мультиплексоров 38.1,...38.К используется известная ИМС типа 533 КП11 [5, с.242]. В качестве регистров 39.1,...,39.J оперативного анализа и 40.1, ...,40.К фиксации КООС используется известная ИМС типа 564 ИР9, [6, с. 71]. В качестве логического элемента 41 И используется известная ИМС типа 533 ЛИ1 [5, с.245]. В качестве логического элемента 42 ИЛИ - 533 ЛЛ1 [5, с. 246].
Таймер 4 (фиг. 5) содержит устройства набора и установки исходной временной информации. С помощью кнопок 45 "Установка секунд", 46 "Установка минут", 47 "Установка часов", 48 "Установка дней", 49 "Установка месяцев" приводится установка текущего времени до месяца включительно. Указанные кнопки обеспечивают коммутации установочных сигналов, от задающего генератора 59 через диоды 51 "Установки минут", 52 "Установки часов", 53 "Установки дней", 54 "Установки месяцев" на соответствующие счетчики 66 и 79. С помощью наборного устройства 55 единиц лет, наборного устройства 56 десятков лет, наборного устройства 57 сотни лет, наборного устройства 58 тысячелетий устанавливаются текущие значения года, которые при нажатии кнопки 50 "Занесение времени" заносится в соответствующие счетчики 94,...,97. При нажатии кнопки 45 "Установка секунд" обнуляются задающий генератор 59 импульсов, счетчик 60 единиц секунд (счетчик с модулем счета 10) и счетчик 61 десятков секунд (счетчик с модулем счета 6), что обеспечивает точность установки секунд по сигналам точного времени. Отображение информации о единицах секунд и десятках секунд происходит соответственно через дешифратор 62 единиц секунд, дешифратор 64 десятков секунд на индикатор 63 единиц секунд и индикатор 65 десятков секунд. После обнуления счетчики 60 единиц секунд и 61 десятков секунд начинают непрерывный счет секундных импульсов с отображением на индикаторах 63 единиц секунд и 65 десятков секунд текущего значения счета времени. В качестве задающего генератора 59 импульсов используется известное устройство [8, с. 64, рис. 1, схема включения микросхемы ДД1]. В качестве счетчика 60 с модулем счета 10 и счетчика 61 с модулем счета 6 используется известная ИМС 564ИЕ15 программируемая соответственно на модуль счета 6 и 10 [5, с. 0 - 158] . Проводим установку минут, для чего нажимаем кнопку 46 "Установка минут". При этом импульсы "Т1" с выхода задающего генератора 59 импульсов через нажатую кнопку 46 "Установка минут" поступают на счетчик 66 минут и часов, который обеспечивает установку единиц минут и десятков минут и эта информация через регистры 67 единиц минут, 68 десятков минут, дешифраторы 69 единиц минут, 70 десятков минут отображается на индикаторах 71 единиц минут и 72 десятков минут. Для установки часов и десятков часов нажимается кнопка 47 "Установка часов". При этом импульсы Т2 с выхода задающего генератора 59 импульсов через нажатую кнопку 47 "Установка часов" поступают на тот же счетчик 66 минут и часов, который на этот раз обеспечивает установку часов и десятков часов. Эта информация через регистры 73 единиц часов, 74 десятков часов, дешифраторы 75 единиц часов, 76 десятков часов отображается на индикаторах 77 единиц часов и 78 десятков часов. Установка дней. При нажатии кнопки 48 "Установка дней" импульсы Т1 с выхода задающего генератора 59 импульсов через нажатую кнопку 48 "Установка дней" поступают на счетчик 79 дней и месяцев, который обеспечивает установку единиц дней и десятков дней и эта информация через регистры 80 единиц дней, 81 десятков дней, дешифраторы 82 единиц дней, 83 десятков дней отображается на индикаторах 84 единиц дней и 85 десятков дней. Для установки месяцев нажимаем кнопку 49 "Установка месяцев". При этом импульсы Т2 с выхода задающего генератора 59 импульсов через нажимную кнопку 49 "Установка месяцев" поступают на тот же счетчик 79 дней и месяцев, который на этот раз обеспечивает установку месяцев и десятков месяцев. Эта информация через регистры 86 единиц месяцев 87 десятков месяцев, дешифраторы 88 единиц месяцев 89 десятков месяцев отображается на индикаторах 90 единиц месяцев и 91 десятков месяцев. Работа счетчика 79 дней и месяцев описана [9, с.74 и 75]. Для формирования импульса переноса года собрана схема, состоящая из первого элемента 92 И переноса года и одновибратора 93 переноса года. При смене месяца 12 (декабря) на месяц первый (январь) на выходе первого логического элемента 208 "И" переноса года появляется срез импульса двенадцатого месяца (импульс на выходе 1-го логического элемента 92 И переноса года появляется при переходе с 11-го месяца на 12-й и существует в течение всего двенадцатого месяца), по которому срабатывает одновибратор 93 переноса года. Импульс одновибратора 93 переноса года поступает на счетчик 94 единиц лет, обеспечивая увеличение содержимого на единицу. Для установки единиц лет, десятков лет, сотен лет и тысячелетий используются наборные устройства 55 единиц лет, 56 десятков лет, 57 сотен лет, 58 тысяч лет и кнопка 50 "Занесение времени". Запись и индикация информации единиц лет, десятков, сотен и тысячи лет идентична. Для примера рассмотрим занесение информации единиц лет. На наборном устройстве 55 единиц лет набираем текущее значение года (аналогично десятки лет, сотни лет, тысяча лет) и нажимаем кнопку 50 "Занесение времени". Информация со всех наборных устройств 55 единиц лет, 56 - десятков лет, 57 - сотен лет, 58 - тысяч лет одновременно переносится в соответствующие счетчики 94 единиц лет, 95 десятков лет, 96 сотен лет, 97 тысяч лет. Информация со счетчиков через дешифраторы 98 единиц лет, 99 десятков лет, 100 сотен лет, 101 тысяч лет поступает на соответствующие индикаторы 102 единиц лет, 103 десятков лет, 104 сотен лет, 105 тысяч лет. Информация с выходов счетчиков 60 единиц секунд, 61 десятков секунд, регистров 67 единиц минут, 68 десятков минут, 73 единиц часов, 74 десятков часов, 80 единиц дней, 81 десятков дней, 86 единиц месяцев, 87 десятков месяцев, счетчиков 94 единиц лет, 95 десятков лет, 96 сотен лет, 97 тысяч лет поступает на мультиплексор 1 и коммутатор 7. В качестве дешифраторов 62 единиц секунд, 64 десятков секунд, 69 единиц минут, 70 десятков минут, 75 единиц часов, 76 десятков часов, 82 единиц дней, 83 десятков дней, 88 единиц месяцев, 89 десятков месяцев, 98 единиц лет, 99 десятков лет, 100 сотен лет, 101 тысяч лет используется известная микросхема 514ИД1 [5, с.118]. В качестве индикаторов 63 единиц секунд, 65 десятков секунд, 71 единиц минут, 72 десятков минут, 77 единиц часов, 78 десятков часов, 84 единиц дней, 85 десятков дней, 90 единиц месяцев, 91 десятков месяцев, 102 единиц лет, 103 десятков лет, 104 сотен лет, 105 тысяч лет используется известная микросхема АЛС324А [9, с.96]. В качестве регистров 67 единиц минут, 68 десятков минут, 73 единиц часов, 74 десятков часов, 80 единиц дней, 81 десятков дней, 86 единиц месяцев, 87 десятков месяцев, используется известная микросхема 564 ИР9 [6, с.71]. В качестве счетчиков 94 единиц лет, 95 десятков лет, 96 сотен лет, 97 тысяч лет используется известная микросхема 564 ИЕ14 [6, с.104]. В качестве одновибратора 93 переноса года здесь и далее по тексту в других блоках используется известная микросхема 564АГ1 [6, с.294]. Диоды 51 установки минут, 52 установки часов, 53 установки дней, 54 установки месяцев служат для развязки цепей импульсов Т1 и Т2 при проведении установки времени (нажатии любой кнопки 46,...,49). Тактирующие импульсы частоты 1024 Гц с выхода задающего генератора 59 импульсов поступают на блок 2 управления.
Блок 5 вывода информации (фиг. 1) представляет собой известное устройство - цифровой синтезатор речи (ЦСР). На вход блока 5 ЦСР поступает КООС от первого блока 3 памяти. Этот сигнал поступает непосредственно на первый вход регистра временного хранения, где и сохраняется до тех пор, пока не будет считан центральным процессором ЦСР, идентифицирован им и воспроизведен в речевой форме. С выхода ЦСР речевой сигнал поступает:
на выходы устройства для подключения головных телефонов экипажа через элемент 23 ИЛИ;
на модулятор передатчика 11 первого канала бортовой радиостанции для излучения в эфир и последующего приема приемником 15 первого канала наземной радиостанции. Вторым назначением этого сигнала является информирование экипажей самолетов, находящихся в воздухе, об имеющем место особом случае в полете и оказании помощи экипажу терпящему бедствие;
на вход второго блока 8 памяти для записи в аналоговый магнитофон с привязкой к текущему времени.
С момента начала синтезирования речевого сигнала и до окончания текущей словоформы на выходе блока 5 ЦСР формируется сигнал "Занято". Этот сигнал подается на вход первого блока 3 памяти и используется для поддержания неизменным КООС на время его озвучивания. С этой целью этот сигнал подается на управляющие входы регистров 40.1,...,40.К через элемент 41 И первого блока 3 памяти. Каждому КООС соответствует свое речевое сопровождение, которое формируется на этапе подготовки словаря и обучения системы. Таким образом, вся информация, выдаваемая экипажу и ЦСР, документируется в реальном времени. В качестве блока 5 ЦСР используется известное устройство [10].
Блок 6 ввода речевой информации (фиг. 6). На входе блока установлены микрофоны 106.1, ...,106.N, где N - число членов экипажа. Обработка речевой информации каждого члена экипажа идентична. С выхода микрофонов информация поступает на предварительные усилители 107.1,...,107.N, в качестве которых использованы предварительные усилители аппаратуры РИ-65 [11, с.40 и 41, рис. 27, схема собрана на транзисторе Т1]. Напряжения с выходов предварительных усилителей 107.1, ...,107.N поступает на соответствующие фильтры 108.1,..., 108. N, (все фильтры идентичны) в качестве которых используются фильтры нижних частот типа ИЖ2.067.151 [12]. Приложение 10, элемент У6. Напряжения с выходов фильтров нижних частот 108.1,...,108.N поступает на второй блок 8 памяти.
Коммутатор 7 (фиг. 7). На вход блока поступает информация о текущем времени от таймера 4 параллельно на все регистры 109 тысяч и сотен лет, 110 десятков и единиц лет, 111 десятков и единиц месяцев, 112 десятков и единиц дней, 113 десятков и единиц часов, 114 десятков и единиц минут, 115 десятков и единиц секунд, которая заносится в регистры по сигналу запись. В качестве управляющих сигналов записи и считывания (последовательного вывода) используются сигналы, поступающие от блока 2 управления частоты 1Гц (импульс начала кадра) и частоты 64ГЦ (таковые импульсы) соответственно. В качестве регистров 109,...,115 используются известная ИМС 564 ИР6 [6]. Сигналы с выхода блока 7 коммутатора поступают на второй блок 8 памяти в виде трех последовательностей: - Импульсы начала кадра (ИНК), следующие с частотой 1 Гц; - тактовые импульсы (ТИ) следующие с частотой 64 Гц; информационные импульсы (ИИ) - кодовая информация содержащая всю информацию о текущем времени. Все три последовательности записываются на три дорожки аналогового магнитофона 118 (каждая на всю дорожку). Таким образом информация о времени обновляется в каждом кадре с частотой 1Гц. Дискрет описания времени 1 с.
Второй блок 8 памяти (фиг. 8) предназначен для согласования уровней сигналов, поступающих от блока 5 ЦСР, блока 6 ввода речевой информации и блока 7 коммутатора до уровней, обеспечивающих нормальную работоспособность блока 118 (аналоговый магнитофон) и их записи. При этом обработка аналоговых сигналов производится в блоках 116.1,...,116.N усилителей записи аналоговых сигналов, в качестве которых используется известная схема усилителя записи аппаратуры РИ-65 [11, с.40, 41, рис. 27, схема собрана на транзисторах Т2,.. . , Т7] . От коммутатора 7 поступает цифровая информация - импульсы начала цикла (ИНЦ), тактовые импульсы (ТИ) и информационные импульсы (ИИ), в которых заложена информация о текущем (на момент записи) времени. Для реализации записи цифровой информации на аналоговый магнитофон используются известные блоки 117.1,...,117.3 сопряжения цифровой информации с входом аналогового магнитофона. Известная схема изображена в рамках блока 117.1 [13, с. 33] . В качестве блока 118 памяти речевой информации используется известный многодорожечный аналоговый магнитофон типа П-500 [14].
Блок 9 распределения информационных потоков (БРИП) (фиг. 9) осуществляет распределение информационных потоков в соответствии с запросом, поступающим с Земли. По запросу с Земли от первого декодера 19 поступает код запроса, который регистрируется в регистре-защелке 131 запроса. Запись в регистр производится по сигналу вырабатываемому 2-м одновибратором 132 БРИП. Код запроса дешифрируется на дешифраторе 133 запроса и в зависимости от кода запроса разрешает прохождение тактовых импульсов частотой 4800 Гц через логические элементы 127.1, ...,127.N+1 И на регистры 123.1,...,123.N+1 соответственно. Запись КООС и КООС+Доп ИП (дополнительный информационный поток) осуществляется через 1-й и 2-й логические элементы 124 и 125 НЕ с частотой 1 Гц, поступающей от блока 2 управления. Применение двух элементов НЕ обеспечивает задержку сигнала для исключения неопределенности на фронтах, т.е. они выполняют функцию цифровой линии задержки. Таким образом, обеспечивается считывание информации либо только КООС либо КООС + Доп. ИП по самолету, двигателю, самолетным системам,..., экипажу в зависимости от кода запроса, поступающего с Земли. Первый одновибратор 126 обеспечивает запрет прохождения тактовых импульсов частотой 4800 Гц через логический элемент 127.1 И при наличии кода запроса на выдачу Доп ИП. Считанная с одного из регистров 123.1,...,123.N информация через логический элемент 128 ИЛИ подается на вход регистра 129 буфера, куда записывается в последовательном коде с тактовой частотой 4800 Гц. Затем записанная информация подается на вход регистра 130 выхода в параллельном коде. Запись в регистр 130 выхода производится с частотой 1 Гц с 3-го одновибратора 135. Таким образом, обеспечивается ранжирование информационного потока по предназначению в зависимости от кода запроса с Земли.
В качестве регистров 123.1,..., 123.N+1 129, 130, 131 используется известная ИМС 564ИР6 [6] . В качестве логических элементов 124 и 125 НЕ используется известная ИМС 564ЛН2 [6]. В качестве первого одновибратора 126, второго одновибратора 132 и третьего одновибратора 135 используется известная ИМС 133АГ1 [5]. В качестве логического элемента 127.1,...,127.N+1 И используется известная ИМС 133 ЛИ1 [5]. В качестве логического элемента 128 ИЛИ используется известная ИМС 133ЛД3 [5]. В качестве дешифратора 133 запроса используется известная ИМС 564 ИД1 [6]. В качестве счетчика 134 цикла записи используется известная ИМС 564ИЕ15 [6].
Блок 10 анализа предназначен для статической обработки поступающей информации, формирования приоритетов по ситуациям, распознавания речи, синтеза речевого сообщения и отображения графической и буквенно-цифровой информации в интересах повышения безопасности полетов и эффективности эксплуатации авиационной техники.
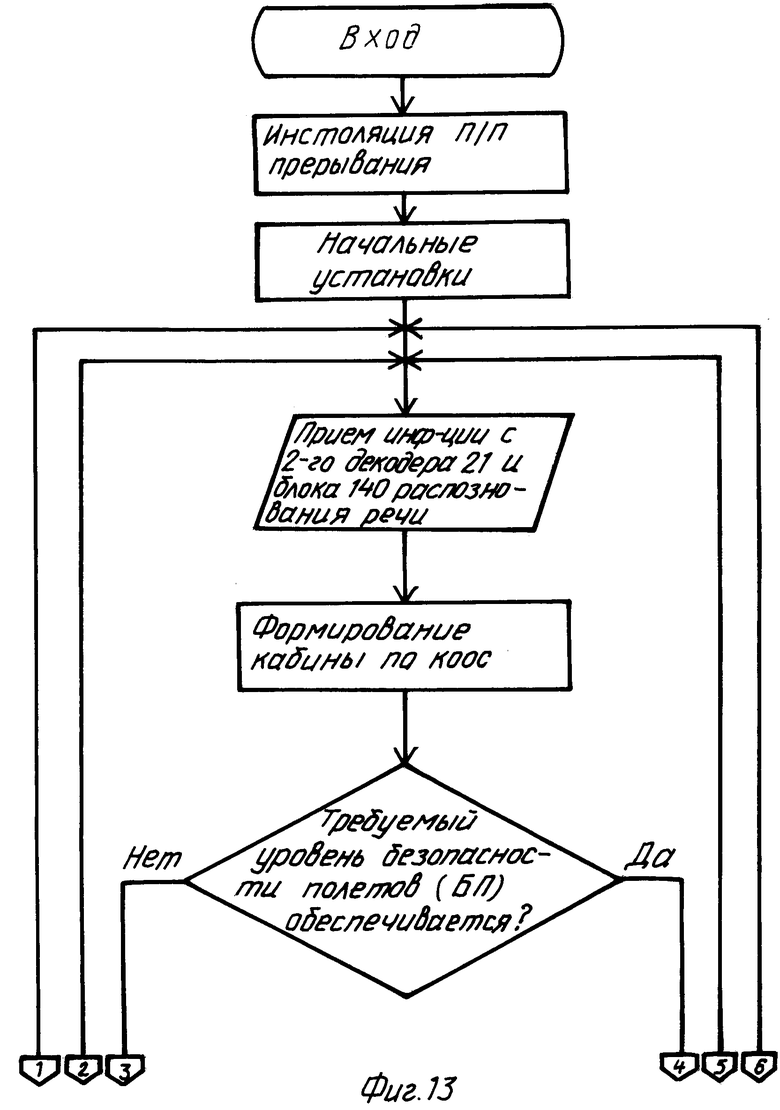
С приемника 15 первого канала наземной радиостанции поступает речевой сигнал на блок 140 распознавания речи, где каждому речевому сообщению ставится в однозначное соответствие цифровой код. Полученный код, а также КООС (КООС + Доп. ИП) поступающие от второго декодера 21, поступают на входы блока 136 статистической обработки. Один из возможных вариантов статистической обработки поступающей информации представлен на фиг. 13 (лист 1 - 5). Работа алгоритма начинается с выполнения стандартных подпрограмм инициализации, установки прерываний, программирования портов, таймера и т.д. После выполнения начальных установок производится прием информации с второго декодера 21 и блока 140 распознавания речи. По введенному КООС формируется отображение состояние органов управления самолетными системами и индикаторных приборов в кабине самолета. Следующим этапом работы алгоритма является анализ обеспечения текущего уровня безопасности полета (ТУБП). В случае если ТУБП не обеспечивается то производится более глубокий анализ КООС:
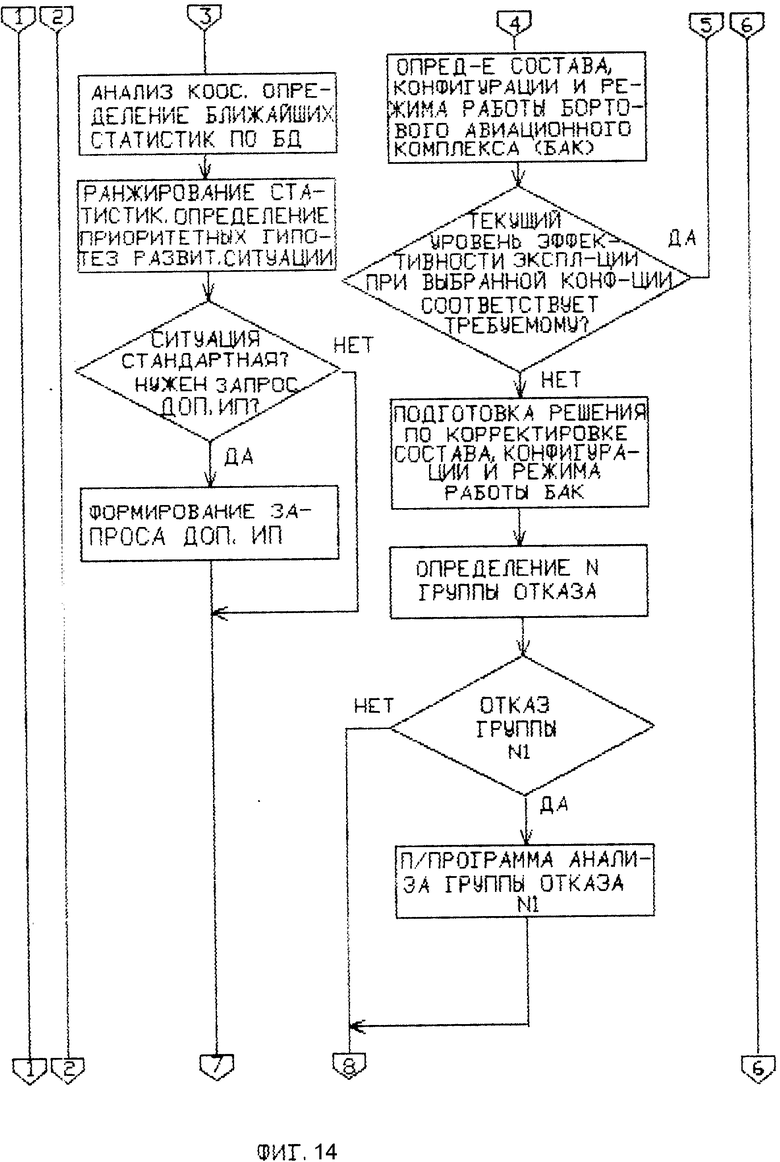
определяются ближайшие статистики по базе данных (БД);
производится ранжирование статистик по БД;
определяются приоритетные гипотезы развития отказовой ситуации.
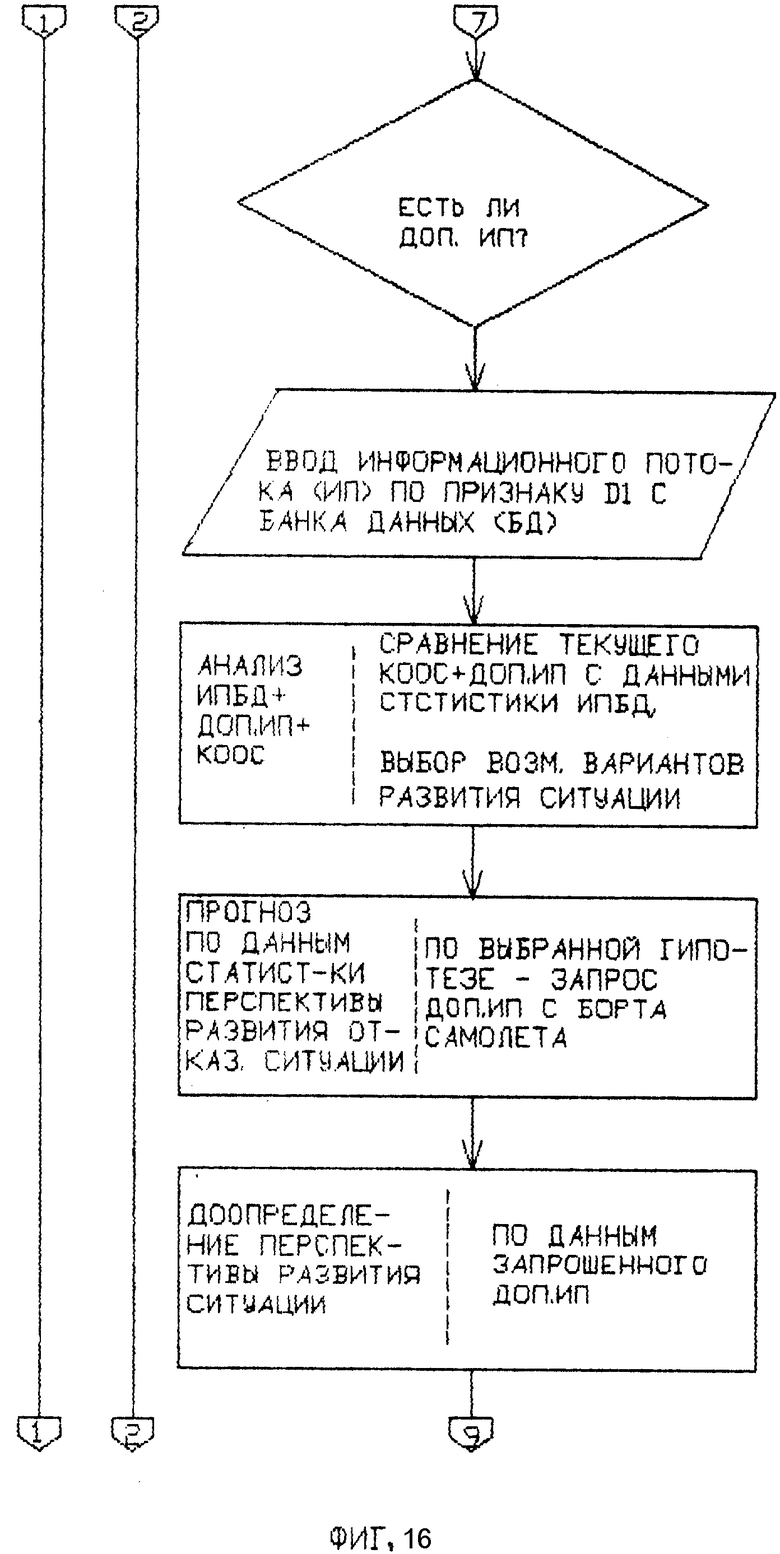
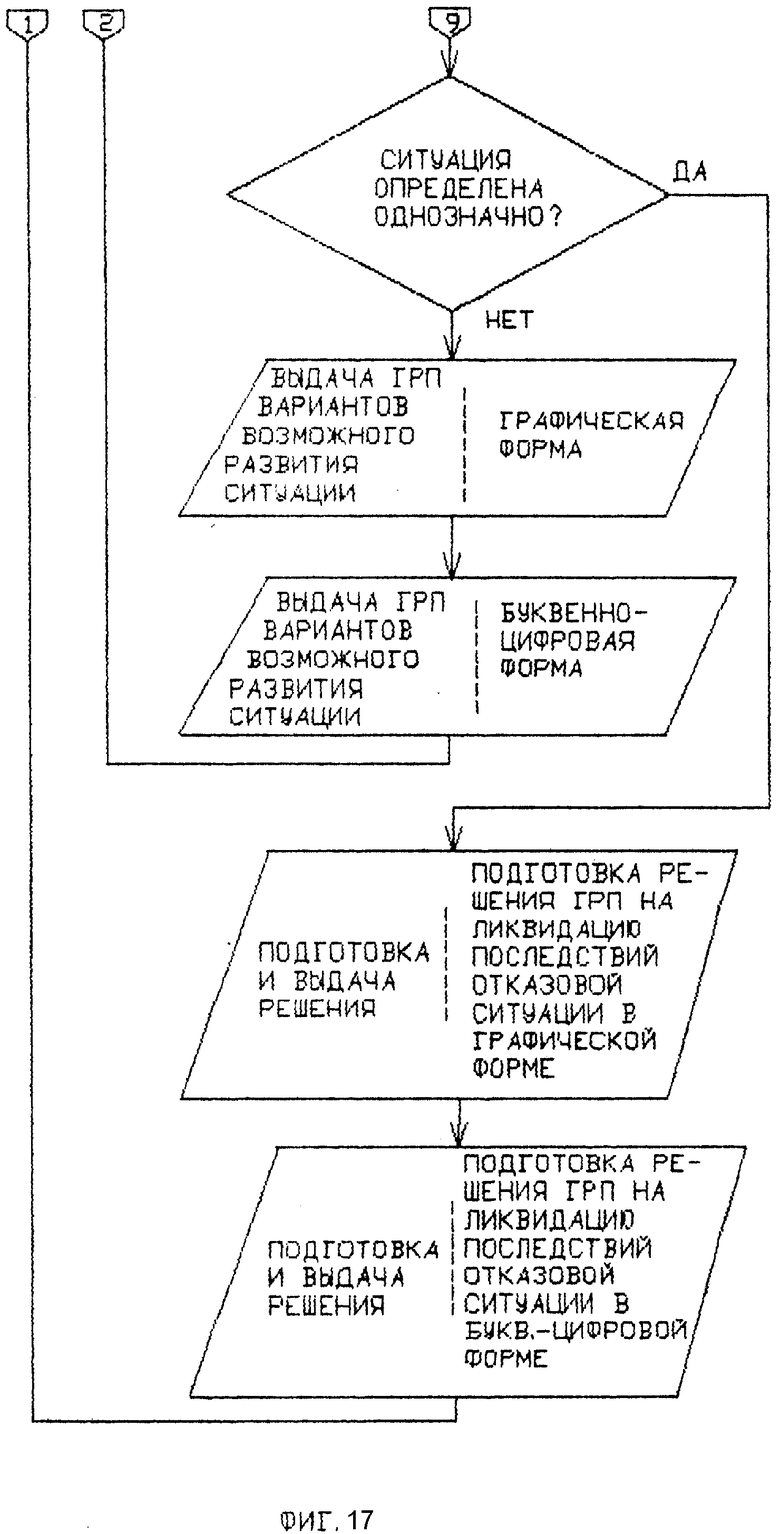
Далее проводится анализ является ли ситуация стандартной и нужен ли запрос дополнительного информационного потока (Доп. ИП) с борта самолета. В случае если Доп. ИП нужен, то формируется запрос на соответствующий Доп. ИП N-го типа и этот запрос через второй кодер 22 и передатчик 18 второго канала наземной радиостанции поступает на борт летательного аппарата по второму каналу связи Земля-Борт. Для повышения глубины анализа и достоверности принимаемых решений на следующем этапе по полученному Доп. ИП производится анализ совокупного информационного потока в составе - информационного потока, запрошенного и принятого с банка 138 данных (ИПБД) и КООС, + Доп. ИП с борта самолета. По результатам анализа доопределяется ситуация на борту летательного аппарата, выбираются возможные варианты ее развития и по выбранной гипотезе производится запрос Доп. ИП N+1 с борта самолета. В случае если ситуация на борту определена не однозначно, то на блок 139 отображения визуальной информации выдаются несколько вариантов возможного развития ситуации в соответствии с их приоритетом и рекомендации по предотвращению отказов. После этого цикл обработки информации повторяется. В случае если ситуация на борту определена однозначно, то подготавливается и выводится на блок 139 отображения визуальной информации единственное решение на предотвращение развития и ликвидацию последствий отказовой ситуации. Указанный алгоритм работает непрерывно и обеспечивает поддержание текущего уровня безопасности полета не ниже заданного.
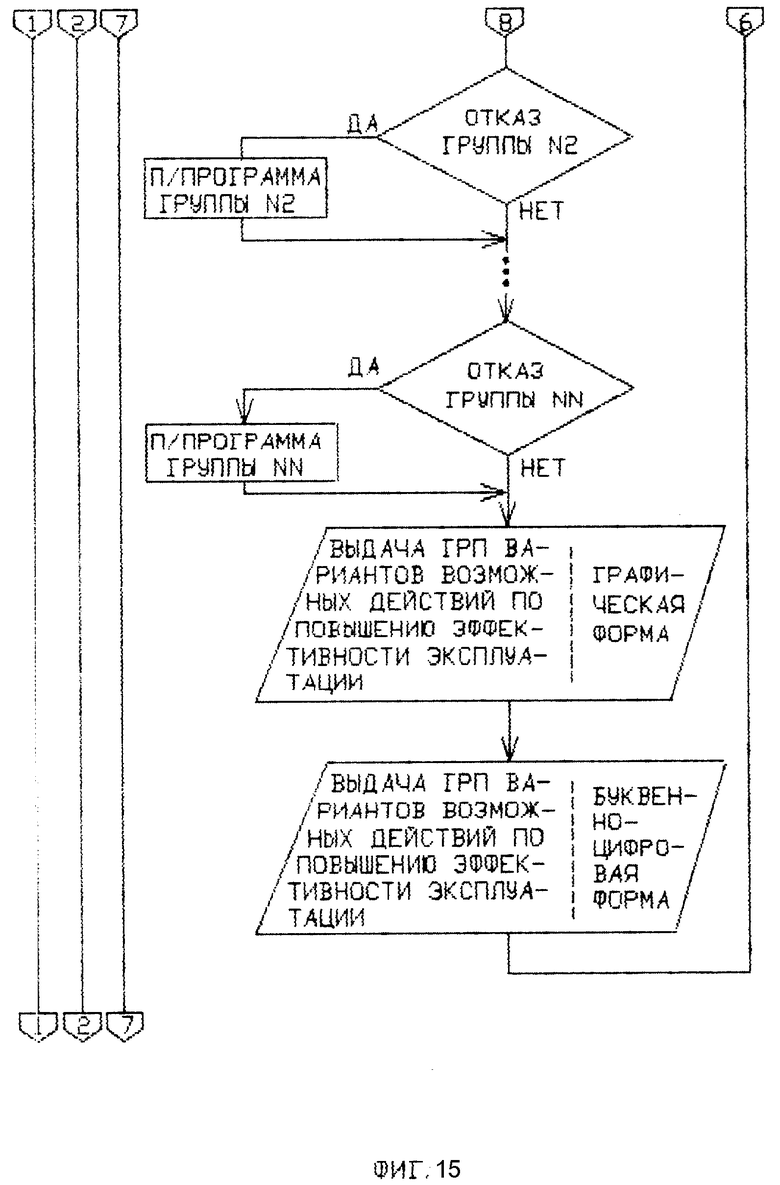
Если требуемый уровень безопасности полета обеспечивается, то включается алгоритм оценки и обеспечения текущего уровня эффективности эксплуатации, при этом на первом этапе работы алгоритма определяется состав, конфигурация и режимы работы бортового авиационного комплекса (БАК). Анализируется соответствует ли текущий уровень эффективности эксплуатации при выбранной конфигурации требуемой. Если нет, то подготавливается решение по корректировке состава, конфигурации и режима работы БАК. На следующем этапе определяется номер группы отказа и при отказе N1 типа вызывается соответствующая подпрограмма анализа группы отказа N1 типа. После проведения углубленного анализа производится выдача на блок 139 отображения визуальной информации возможных действий по повышению эффективности эксплуатации БАК в графической форме и выдача рекомендаций по повышению эффективности БАК в буквенно-цифровой. Алгоритм работает непрерывно и на каждом последующем этапе наращивает глубину и достоверность принимаемых решений.
Таким образом, предлагаемый алгоритм обеспечивает поддержание текущего уровня эффективности эксплуатации не ниже заданного. Оба алгоритма в совокупности обеспечивают поддержание текущих уровней безопасности полета и эффективности эксплуатации на заданных уровнях. Исключительным достоинством предлагаемого устройства является выполнение указанных функций в масштабе практически реального времени.
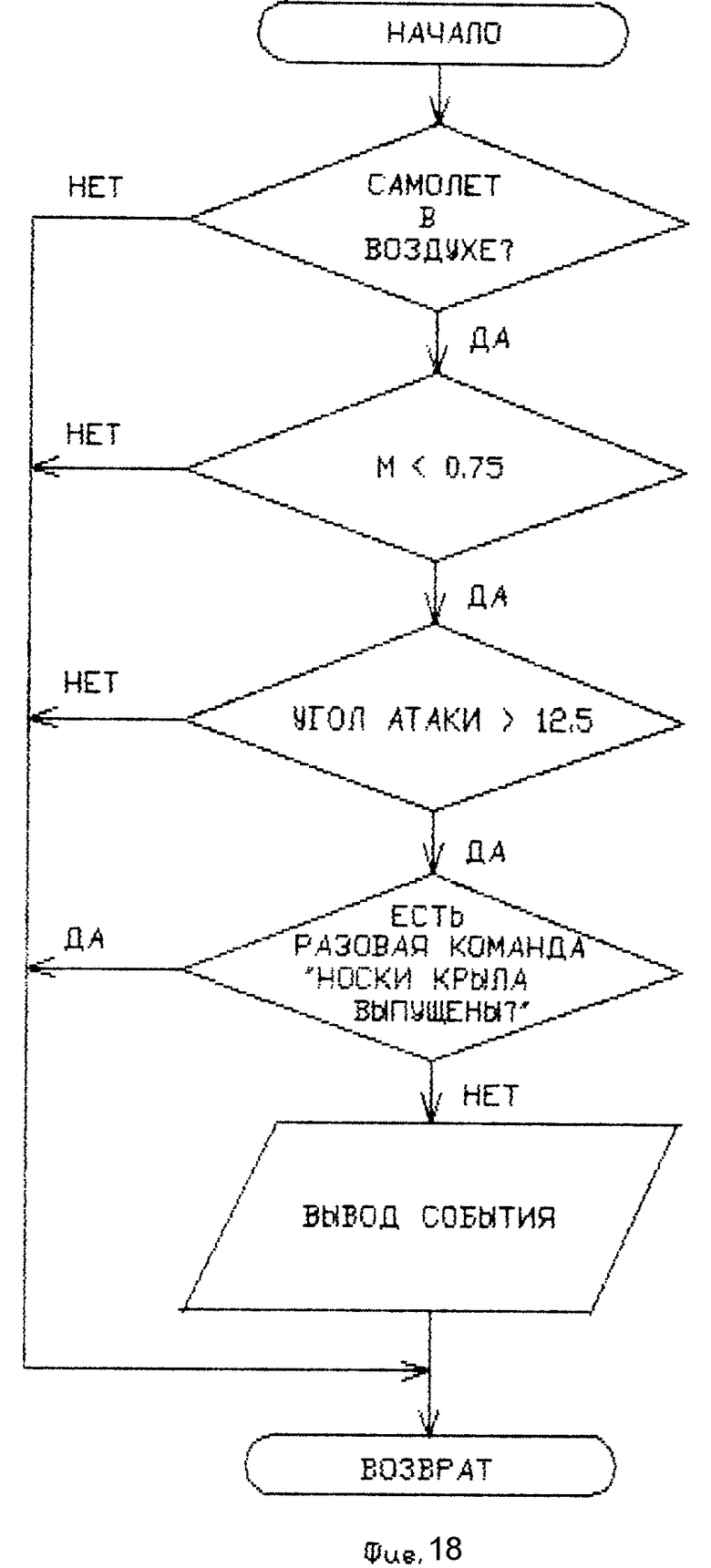
В качестве примеров более глубокого анализа отказовых ситуаций приведены частные алгоритмы обработки трех отказовых ситуаций (фиг. 14 - 16). Фиг. 14. Алгоритм парирования отказа управления носками крыла в режиме "Автомат". Событие контролируются в процессе полета при числе Маха менее 0,75. Условия формирования события:
наличие одной из трех команд "Полет", "Взлет", "Посадка";
отсутствие разовой команды "Носки крыла выпущены";
угол атаки крыла более 12,5o;
скорость полета по числу Маха менее 0,75.
В данной ситуации под выводом события (фиг. 14) подразумевается (см. Основной алгоритм фиг. 13, левое плечо, этап "Выдача группе руководства полетами (ГРП) на блок 139 подготовленного решения на ликвидацию последствий отказовой ситуации в графической и буквенно-цифровой форме"). В частности, по данной ситуации на блоке 139 отображения визуальной информации представляется раздел арматуры кабины, управление которой обеспечивает предотвращение развития отказовой ситуации и выводится сообщение "Перейти на ручное управление носками крыла, установить положение носков крыла в соответствии с этапом полета" (на этапах "Взлет", "Посадка" - выпущено; на этапе "Полет" - убрано).
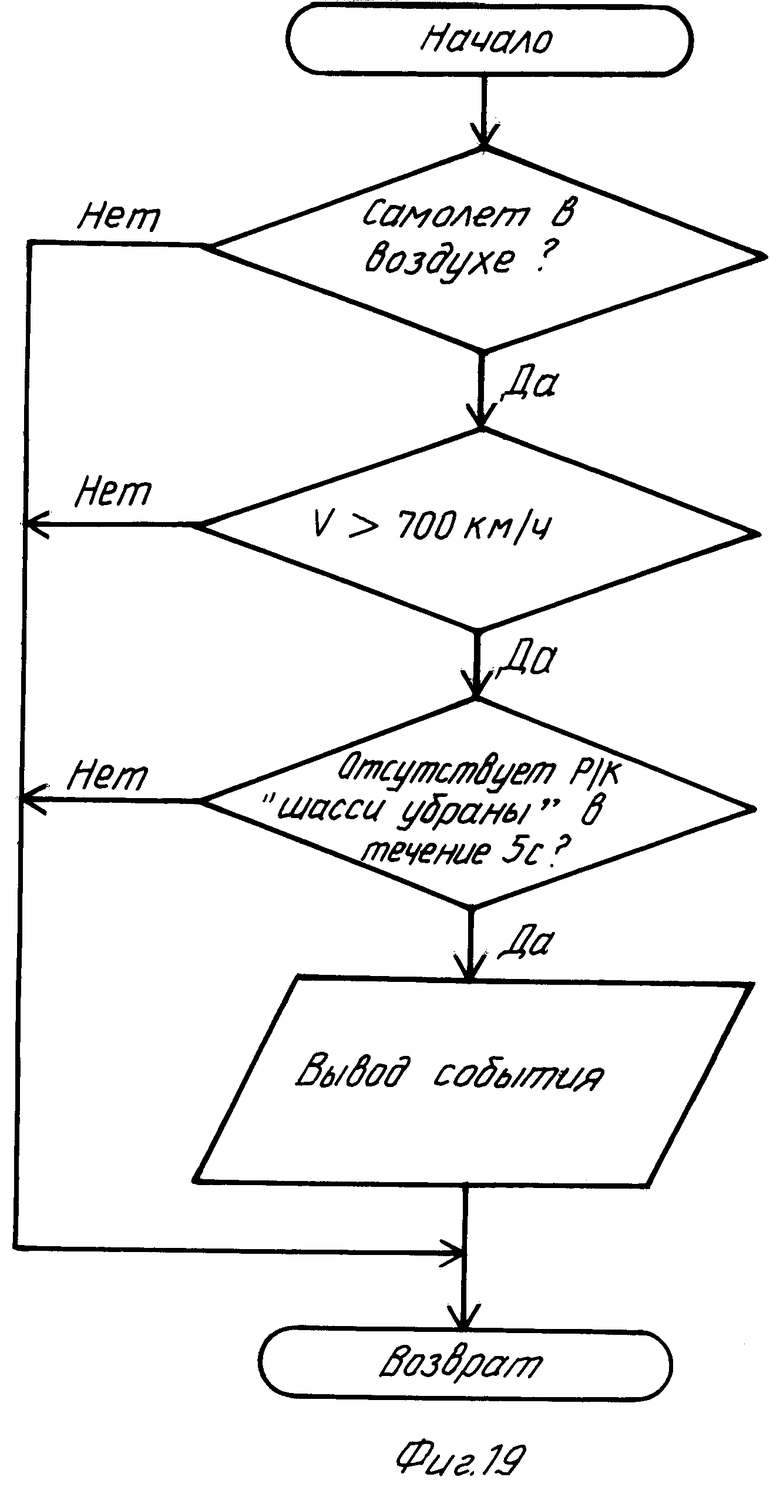
Фиг. 15. Алгоритм парирования ситуации "Скорость более 700 км/ч при выпущенных шасси". Данная ситуация фиксируется при следующих условиях:
наличие одной из трех команд "Полет", "Взлет", "Посадка";
наличие разовой команды "Шасси выпущены";
время более 5 с;
скорость полета приборная более 700 км/ч.
В данной ситуации под выводом события (фиг. 15) подразумевается (см. Основной алгоритм фиг. 13, левое плечо, этап "Выдача группе руководства полетами (ГРП) на блок 139 подготовленного решения на ликвидацию последствий отказовой ситуации в графической и буквенно-цифровой форме". В частности по данной ситуации на блоке 139 отображения визуальной информации представляется раздел арматуры кабины, управление которой обеспечивает предотвращение развития отказовой ситуации и выводится сообщение "Уменьшить скорость (V < 700 км/ч)", "убрать шасси".
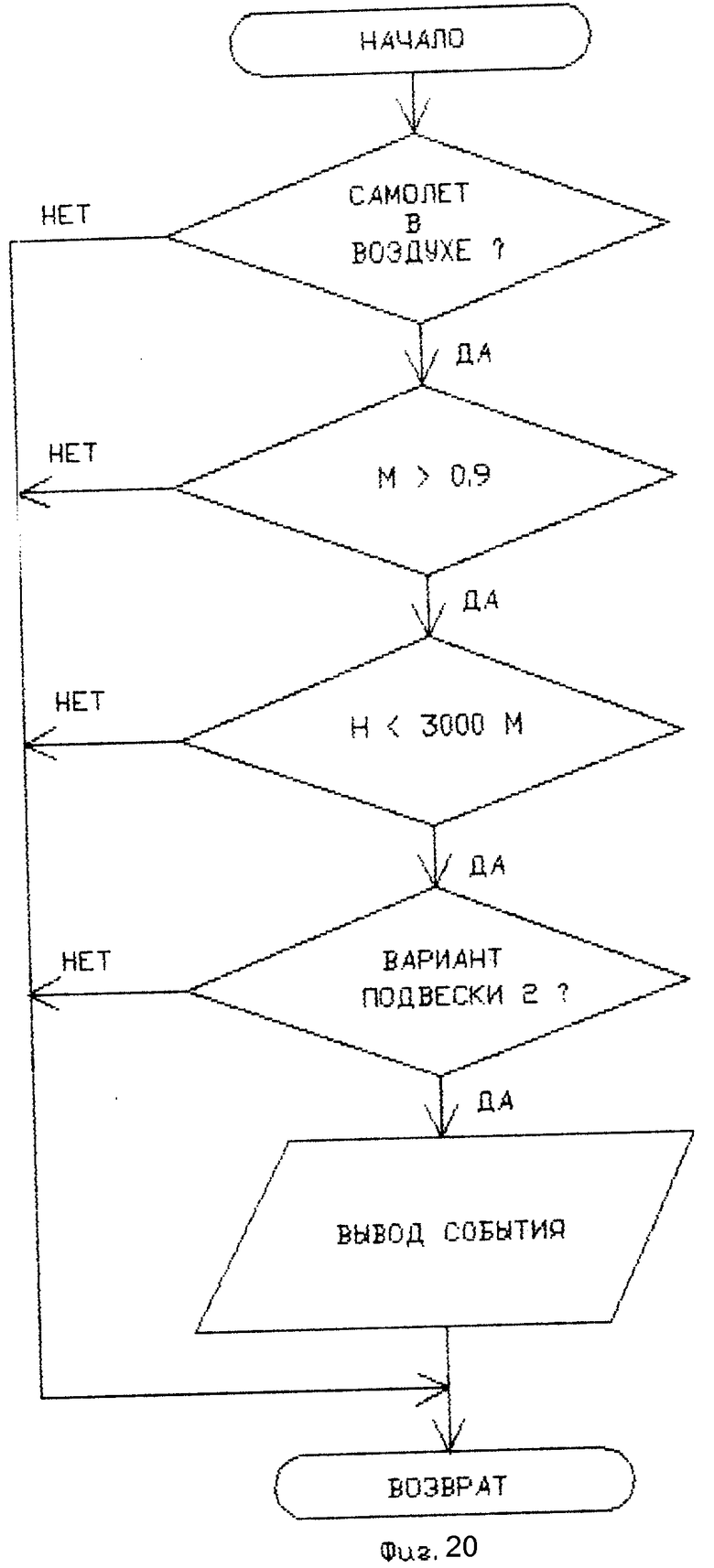
Фиг. 16. Алгоритм парирования ситуации "Число M более 0,9 на высоте менее 3000 м при варианте подвески N2". Данная ситуация фиксируется при следующих условиях:
наличие одной из трех команд "Полет", "Взлет", "Посадка";
наличие разовой команды "Н (высота) менее 3000 м;
вариант подвески 2;
скорость полета по числу Маха более 0,9.
В данной ситуации под выводом события (фиг. 16) подразумевается (см. Основной алгоритм фиг. 13, левое плечо, этап "Выдача группе руководства полетами (ГРП) на блок 139 подготовленного решения на ликвидацию последствий отказовой ситуации в графической и буквенно-цифровой форме". В частности по данной ситуации на блоке 139 отображения визуальной информации представляется раздел арматуры кабины, управление которой обеспечивает предотвращение развития отказовой ситуации и выводится сообщение "Уменьшить скорость M < 0,9" - (выпустить тормозные щетки, выключить "Форсаж", установить "РУД" в положение ниже "Максимал").
Пример отображения кабины самолета терпящего бедствие по данным КООС на блоке 139 отображения визуальной информации приведен на фиг. 17. На фиг. 18. дан пример прогноза развития отказовой ситуации (фиг. 17) на 6 с вперед по данным статистики из банка данных блока 10 анализа.
В качестве блока 140 распознавания речи может быть использовано известное устройство [15] . В качестве синтезатора 141 речи используется известное устройство [10] . В качестве блока 139 отображения визуальной информации используется стандартный графический SVGA монитор [16]. В качестве блока 136 статистической обработки и блока 137 формирования приоритетов используется известное устройство [17]. В качестве банка 138 данных используется известное устройство [18]. В качестве передатчика 11 и приемника 12 первого канала бортовой радиостанции, передатчика 16 и приемника 15 первого канала наземной радиостанции используются соответственно передатчик и приемник известной радиостанции [12]. В качестве передатчика 14 и приемника 13 второго канала бортовой радиостанции, передатчика 18 и приемника 17 второго канала наземной радиостанции используются соответственно передатчик и приемник известной радиостанции [19]. В качестве первого кодера 20 и первого декодера 19, второго кодера 22 и второго декодера 21 используются соответственно кодер и декодер известной системы Р-099М [20]. В качестве логического элемента 23 ИЛИ используется известная микросхема 564 КТ3 [6].
Блок 37 учета предыстории (БУП) (Фиг. 4 и 11). С выхода блока 36 БФКООС коды ситуации, требующие учета времени нахождения их в активном (сработавшем) состоянии поступают на вход блока 37 БУП (фиг. 11). Эти коды подаются на входы "А" схем сравнения 142.1,...,142.N БУП. На вторые входы ("В") указанных схем сравнения подаются жестко прошитые коды с блока 148 установки кодов сравнения. Код отказа определенной системы вызывает срабатывание схемы сравнения соответствующей данному коду отказа и активный сигнал сработавшей схемы сравнения подается на информационный вход соответствующего счетчика 143.1,...,143.N БУП, а на тактовые входы счетчиков 143.1,...,143.N БУП при этом подаются тактовые импульсы частотой 1Гц, обеспечивающие подсчет времени нахождения соответствующего кода отказа в активном состоянии с точностью до секунды. Коды с выходов счетчиков 143.1,...,143.N БУП, представляющие собой время нахождения кодов обобщенной отказовой ситуации в активном состоянии, подаются на адресные входы блока 36 БФКООС, вызывая таким образом изменение кода обобщенной отказовой ситуации в зависимости от времени присутствия данной ситуации на входе блока 37 БУП, т.е. обеспечивается учет времени существования отказовой ситуации за весь полет, или предыстория отказов в любой момент текущего времени в том числе и на момент окончания полета. Для установки счетчиков 143.1,...,143.N БУП в исходное состояние используется схема начального пуска, собранная на базе одновибратора 144 начальной установки БУП. Предлагается два режима. Начальная установка при включении питания (работа на земле). При этом задержка включения определяется временем заряда конденсатора 145 БУП через резистор 146 БУП. По завершении заряда конденсатора 145 БУП срабатывает одновибратор 144 начальной установки и осуществляет установку всех счетчиков 143.1,...,143.N БУП через логический элемент 147 ИЛИ БУП в исходное состояние. Второй режим (работа в воздухе). При формировании сигнала "Старт 0" (см. табл. 1, 2) начальная установка счетчиков обеспечивается им через логический элемент 147 ИЛИ БУП. В качестве схем сравнения 142.1,...,142.N БУП используются известные ИМС типа 533СП1, [5]. В качестве счетчиков 143.1,...,143.N БУП используется известная ИМС 564 ИЕ10 [6] . В качестве одновибратора 144 начальной установки БУП используется известная ИМС типа 564 АГ1, [6]. В качестве логического элемента 524 ИЛИ - ИМС типа 533ЛЛ1 [5]. Блок 148 установки кодов сравнения реализован распайкой выводов "В" схем 142.1,...,142.N сравнения к потенциалам логического нуля или единицы в зависимости от значения соответствующего разряда кода сравнения.
Блок 44 эксплуатационного репрограммируемого постоянного запоминающего устройства (фиг. 4 и 12). Основной составной частью блока 44 ЭРПЗУ является ИМС Электрически стираемое репрограммируемое постоянное запоминающее устройство (ЭРПЗУ) например, 1601 РР3 [5]. На адресные входы ЭРПЗУ 149 информация подается с выхода счетчиков 150.1,...,150.N адресов ЭРПЗУ, который обеспечивает последовательный перебор адресов с АО по Амах при поступлении очередного импульса "Запись в ЭРПЗУ" от блока 36 БФКООС первого блока 3 памяти. Управляющий код для обеспечения режима стирания, записи или чтения формируется при помощи ПЗУ 151 записи ЭРПЗУ, ПЗУ 152 чтения ЭРПЗУ, ПЗУ 153 стирания ЭРПЗУ. Выбор ПЗУ 151 записи ЭРПЗУ осуществляется сигналом "Запись в ЭРПЗУ", поступающим от блока 36 БФКРРС первого блока 3 памяти через одновибратор 158 записи ЭРПЗУ. Одновибратор обеспечивает необходимую длительность сигнала выборки ПЗУ 151 записи ЭРПЗУ, которое обеспечивает необходимую диаграмму управляющих сигналов для реализации записи в ЭРПЗУ 149. Одновременно сигнал "Запись в ЭРПЗУ" через второй логический элемент 161 ИЛИ ЭРПЗУ поступает на триггер 162 ЭРПЗУ, обеспечивая его установку в активное состояние. Сигнал уровня логической единицы с выхода триггера 162 ЭРПЗУ обеспечивает прохождение тактовых импульсов с генератора 164 тактовых импульсов ЭРПЗУ через элемент 163 И ЭРПЗУ на счетчик 165 программ ЭРПЗУ. Формирование диаграммы записи происходит за счет перебора адресов ПЗУ 151 записи ЭРПЗУ счетчиком 165 программ ЭРПЗУ. Для установки счетчика 165 программ ЭРПЗУ и триггера 162 ЭРПЗУ в исходное состояние по завершении цикла записи используется сигнал переноса счетчика 165 программ ЭРПЗУ, который через элемент 166 НЕ ЭРПЗУ и третий логический элемент 170 ИЛИ ЭРПЗУ обнуляет триггер 162 ЭРПЗУ (установка в исходное состояние). Одновременно сигнал с выхода логического элемента 166 НЕ через одновибратор 167 обнуления счетчика программ ЭРПЗУ, цепь задержки (второй резистор 168 ЭРПЗУ и второй конденсатор 169 ЭРПЗУ) и первый элемент 154 ИЛИ ЭРПЗУ обнуляет счетчик 165 программ ЭРПЗУ (устанавливает в исходное состояние). Аналогично описанному работает схема при поступлении сигналов "Чтение ЭРПЗУ" от элемента 42 ИЛИ первого блока 3 памяти, или "Стирание" (сигнал "Старто" от блока 33 БФКЭП). При этом используются одновибратор 159 чтения ЭРПЗУ и ПЗУ 152 чтения ЭРПЗУ для реализации чтения и одновибратор 160 стирания ЭРПЗУ совместно с ПЗУ 153 стирания ЭРПЗУ при организации стирания информации из ЭРПЗУ. Информация, подлежащая записи, поступает от блока регистров 39.1,...,39.J первого блока 3 памяти на блок 149 РПЗУ. Считанная информация из блока 149 РПЗУ поступает на блок мультиплексоров 38.1, . . .,38.K, которые управляются сигналом "Чтение ЭРПЗУ". Начальная установка счетчиков 165 программ ЭРПЗУ, 150.1,...,150.N адресов РПЗУ 149, триггера 162 ЭРПЗУ осуществляется сигналом одновибратора 155 начальной установки ЭРПЗУ, который запускается при включении питания через цепь задержки, состоящей из первого резистора 157 ЭРПЗУ и первого конденсатора 156 ЭРПЗУ. В качестве блока 149 РПЗУ используется ИМС типа 1601 РР3 [13, с. 100] ; генератора 164 тактовых импульсов - известная схема [7, с. 125, рис. 9.15а]; логического элемента 163 и ЭРПЗУ - 533ЛИ1 [5]; счетчика 165 программ ЭРПЗУ - 564ИЕ11 [6]; одновибратора 158 записи ЭРПЗУ, 159 чтения ЭРПЗУ, 160 стирания ЭРПЗУ, 167 обнуления счетчика программ ЭРПЗУ, 165 начальной установки ЭРПЗУ - 564 АГ1 [6]; логического элемента 166 НЕ ЭРПЗУ - 564 ЛН2 [6]; первого и третьего логических элементов 154, 170 ИЛИ ЭРПЗУ - 533 ЛЛ1 [5]; второго элемента 161 ИЛИ ЭРПЗУ - 533 ЛЕ4 [5]; триггера 162 ЭРПЗУ - 564ТМ2 [6] ; счетчиков 150.1,...,150.N адресов ЭРПЗУ - 564ИЕ10 [6]; ПЗУ 151 записи, 152 чтения, 153 стирания ЭРПЗУ - 556 РТ4 [5].
Использование предлагаемого устройства на борту л/а позволит повысить эффективность эксплуатации самолетного парка на земле и в воздухе, снизить аварийность и повысить безопасность полетов. Следует отметить и моральный фактор, который дополнительно скажется на эффективности эксплуатации и безопасности полетов. Экипаж имеет возможность поддерживать контакт (через эфир) с Землей (Группой руководства полетами) автоматически (срабатывая КООС) и объективно (без участия человека в описании отказовой ситуации). Это вселяет уверенность экипажа в правильности ее оценки на Земле и выдачи рекомендации или приказа на целесообразные действия. Дальнейшим развитием предлагаемого устройства является повышение глубины описания ситуации на борту л/а, расширение объема вторичной статистической обработки информации на Земле, использование глобальных спутниковых систем связи. Это позволит достичь потенциальной эффективности эксплуатации самолетного парка и поднять безопасность полетов на качественно новый уровень.
Источники информации
1. Устройство для сбора и анализа данных о работе информационно-вычислительной системы. Авт.св. СССР N 1795476, G 06 F 15/36, 08.01.1990
2. Система регистрации режимов полета МСРП-64. 142.20.00. Руководство по технической эксплуатации. Прототип.
3. Система обработки полетной информации "Маяк-85МС". 7Ю1.583.001РЭ1. Руководство по технической эксплуатации.
4. Программа экспресс-анализа на изделии "Маяк-85М" полетной информации, регистрируемой "Тестер УЗ серии Л" на изделиях 9.12, 9-13, 9-15. Каталог контролируемых событий. 688.85002-03 90.
5. Каталог интегральных микросхем, ч.1. Центральное конструкторское бюро "Дейтон", 1990.
6. Отраслевой стандарт. Микросхемы интегральные серии 564. Руководство по применению. ОСТ 11 340.907-80.
7. МРБ Б. И. Горшков Элементы радиоэлектронных устройств. М.: Радио и связь, 1989.
8. В помощь радиолюбителю. М.: ДОСААФ, вып.95, 1986.
9. Индикаторы знакосинтезирующие, группа 6349. Сборник справочных листов. РМ. 11.073.071.1-82.
10. Дж. Кейтер. Компьютеры - синтезаторы речи. М.: Мир, 1985.
11. Аппаратура РИ-65 Руководство по технической эксплуатации 3.838.003 РЭ.
12. Радиостанция Р-862 Руководство по технической эксплуатации ЯДИЖ1.101.013 РЭ. Регламент технического обслуживания ЯДИЖ1.101.013 РО.
13. Журнал "Радио", N 5, 1986.
14. Аппаратура П-500. Техническое описание и Инструкция по Эксплуатации СЫ3.838.008ТО.
15. Тарабунов И.М. Аппаратурно-программный комплекс для анализа и распознавания речевых сигналов на основе микро-эвм. -В кн. Автоматическое распознавание слуховых образов: Тезисы докладов и сообщений 13-й Всесоюзной школы-семинара "Автоматическое распознавание слуховых образов". (АРСО-13). Сибирское отделение академии наук. Новосибирск 1984.
16. Operating Manual Bedienungsanletung. 14" Color monitor, 1993, Taiwan.
17. ALI 386DX MINI ISA SYSTEM BOARD. User's manual, 1993, Taiwan.
18. Комплекс вычислительный персональный "Электроника МС0585". Накопитель "Электроника МС 54011". 0.305.098.ТУ.
19. Радиостанция Р-800 Л2. Руководство по технической эксплуатации ИЖ1.101.021 РЭ1. Регламент технического обслуживания ИЖ21.101.021 РО. 1984.
20. Аппаратура Р-099М. Руководство по технической эксплуатации. 31.600.000 РЭ.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО СБОРА И РЕГИСТРАЦИИ ПОЛЕТНОЙ ИНФОРМАЦИИ | 1990 |
|
SU1825189A1 |
| УСТРОЙСТВО ДЛЯ УЧЕТА НОМЕРОВ ТРАНСПОРТНЫХ ОБЪЕКТОВ | 1991 |
|
RU2068583C1 |
| СПОСОБ ВЕДЕНИЯ ЗАЩИЩЕННОЙ РАДИОСВЯЗИ И УСТРОЙСТВО ЕГО РЕАЛИЗУЮЩЕЕ | 1995 |
|
RU2108675C1 |
| Многоканальная система программного управления станками | 1984 |
|
SU1236424A1 |
| Система передачи и приема информации | 1987 |
|
SU1411795A1 |
| ИМПУЛЬСНЫЙ КОДОВЫЙ ПРЕОБРАЗОВАТЕЛЬ | 2004 |
|
RU2248607C1 |
| Многоканальное устройство для включения резервных радиостанций | 1991 |
|
SU1823139A1 |
| Устройство для вывода графической информации | 1985 |
|
SU1300517A1 |
| Устройство для сопряжения источника и приемника информации | 1988 |
|
SU1647579A1 |
| Устройство для передачи информации | 1989 |
|
SU1700571A1 |
Изобретение относится к вычислительной и информационно-измерительной технике может быть использовано в системах сбора, регистрации и статистической обработки параметрической и речевой полетной информации в реальном времени в интересах безопасности полетов и повышения эффективности эксплуатации. Цель изобретения - расширение функциональных возможностей в интересах безопасности полетов и эффективности эксплуатации. Цель достигается за счет возможности оценивания текущего уровня безопасности полета летательного аппарата в признаковом пространстве отказов и действующих ограничений в масштабе реального времени. Устройство содержит блоки памяти, блок анализа, блок управления, таймер, мультиплексор, синтезатор речи, коммутатор, блок распределения информационных потоков, блок ввода речевой информации, передатчики и приемники бортовой и наземной радиостанций, кодер, декодер и логический элемент ИЛИ. 20 ил., 2 табл. .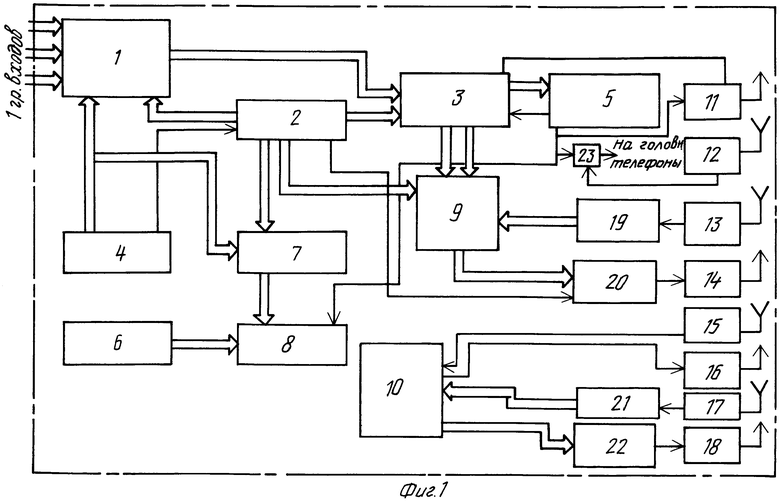
Устройство для сбора и регистрации полетной информации, содержащее блок анализа, блок памяти, блок управления и таймер, отличающееся тем, что в него дополнительно включены мультиплексор, синтезатор речи, коммутатор, блок распределения информационных потоков, блок ввода речевой информации, второй блок памяти, передатчик первого канала бортовой радиостанции, приемник первого канала бортовой радиостанции, передатчик второго канала бортовой радиостанции, приемник второго канала бортовой радиостанции, первый декодер, первый кодер, логический элемент ИЛИ, передатчик первого канала наземной радиостанции, приемник первого канала наземной радиостанции, передатчик второго канала наземной радиостанции, приемник второго канала наземной радиостанции, второй декодер, второй кодер, при этом первой группой информационных входов устройства является первая группа информационных входов мультиплексора, второй группой информационных входов которого является первый выход таймера, подключенный к информационному входу коммутатора, управляющий вход которого подключен к первому выходу блока управления, вход запуска которого подключен к второму выходу таймера, второй выход блока управления соединен с управляющим входом мультиплексора, вход которого соединен с информационным входом первого блока памяти, первый управляющий вход которого соединен с третьим выходом блока управления, четвертый выход которого соединен с первым управляющим входом блока распределения информационных потоков, первый и второй информационные входы которого соединены с одноименными выходами первого блока памяти, третий выход которого подключен к входу синтезатора речи, выход готовности которого соединен со вторым управляющим входом первого блока памяти, соответствующий разряд третьего выхода первого блока памяти соединен с входом включения передатчика первого канала бортовой радиостанции, выход приемника которого соединен с первым входом логического элемента ИЛИ, второй вход которого соединен с информационным выходом синтезатора речи, подключенным к первому информационному входу второго блока памяти и к информационному входу передатчика первого канала бортовой радиостанции, выход приемника второго канала бортовой радиостанции через первый декодер соединен с вторым управляющим входом блока распределения информационных потоков, выход которого соединен с информационным входом первого кодера, вход синхронизации которого соединен с пятым выходом блока управления, выход первого кодера соединен с входом передатчика второго канала бортовой радиостанции, выход коммутатора соединен с управляющим входом второго блока памяти, второй информационный вход которого соединен с выходом блока ввода речевой информации, выход приемника первого канала наземной радиостанции соединен с первым информационным входом блока анализа, первый выход блока анализа соединен с входом передатчика первого канала наземной радиостанции, выход приемника второго канала наземной радиостанции через второй декодер подключен к второму информационному входу блока анализа, второй выход которого через второй кодер соединен с входом передатчика второго канала наземной радиостанции.
| SU, авторское свидетельство, 1795476, G 06 F 15/50, 1993 | |||
| Нефтяной конвертер | 1922 |
|
SU64A1 |
| Руководство по технической эк сплуа тации | |||
| Способ гальванического снятия позолоты с серебряных изделий без заметного изменения их формы | 1923 |
|
SU12A1 |
