Изобретение относится к телеметрии, технике связи и может быть использовано в системах передачи информации по каналам связи.
Известен способ передачи информации, заключающийся в сборе сигналов от источников сообщений, формировании сигналов гармонических поднесущих и модуляции их соответствующими сигналами от источников сообщений, фильтрации промодулированных сигналов поднесущих, формировании группового сигнала промодулированных поднесущих колебаний, формировании сигнала несущих колебаний и модуляции его групповым сигналом, передаче промодулированного сигнала по каналу связи [1].
Устройство, реализующее способ, содержит в каждом информационном канале последовательно соединенные датчик, канальный модулятор и канальный фильтр; кроме того, генератор сигналов поднесущих, последовательно соединенные сумматор, модулятор и передатчик, при этом выходы генератора сигналов поднесущих колебаний соединены со вторыми входами соответствующих канальных модуляторов, выходы канальных фильтров соединены с соответствующими входами сумматора, выход передатчика является выходом устройства [2].
Недостатками известных способа и устройства являются низкая достоверность передачи информации из-за существенного уровня перекрестных искажений, жесткие ограничения к максимальному количеству каналов многоканального устройства передачи сигналов, ограниченная область применения.
Известен также способ передачи информации, заключающийся в сборе и синхронизации сигналов от источников сообщений, формировании в каждом информационном канале сигналов кодовых комбинаций, их синхронизации и формировании из них сигналов ШИМ-АИМ, формировании из сигналов ШИМ-АИМ уплотненного группового сигнала и передаче его по радиоканалу [2].
Устройство, реализующее способ, содержит блок синхронизации, последовательно соединенные блок уплотнения каналов и передатчик; кроме того, в каждом информационном канале последовательно соединенные датчик и блок формирования кодовых комбинаций, кроме того, два блока преобразования ШИМ-АИМ и элемент ИЛИ, при этом первый и второй выходы блока формирования кодовых комбинаций соединены соответственно со входом первого и со входом второго блоков преобразования ШИМ-АИМ, выходы которых соединены с одноименными входами элемента ИЛИ, выход элемента ИЛИ каждого информационного канала соединен с соответствующим входом блока уплотнения каналов, выход блока синхронизации соединен с синхронизирующими входами датчиков, блоков формирования кодовых комбинаций и блока уплотнения каналов [2].
Недостатками известных способа и устройства являются:
низкая достоверность передачи информации;
необходимость применения специальных алгоритмов и в связи с этим дополнительных операций над сигналами и дополнительной аппаратуры для формирования кодовых комбинаций и их совместной обработки;
появление дополнительного времени задержки передаваемого сообщения из-за необходимости дополнительного времени на формирование кодовых комбинаций и их совместную обработку как на передающей, так и на приемной стороне, что ужесточает требования к быстродействию применяемой элементной базы.
Наиболее близким к предлагаемому является способ передачи сигналов, заключающийся в сборе сигналов от источников сообщений, уплотнении собранных сигналов, синхронизации их по времени, формировании сигнала несущей частоты, фазовой манипуляции сигнала несущей частоты уплотненным сигналом и передаче промодулированного сигнала по каналу связи [1].
Наиболее близким к предлагаемому является устройство для передачи информации, содержащее датчики цифровой информации, блок синхронизации, блок уплотнения сигналов, последовательно соединенные модулятор и передатчик, при этом выход каждого из датчиков цифровой информации соединен с соответствующим входом блока уплотнения сигналов, выход которого соединен со входом модулятора, выход блока синхронизации соединен с соответствующими входами датчиков цифровой информации и со входом блока уплотнения сигналов, при этом модулятор выполнен в виде модулятора с угловой модуляцией [1].
Известным способу и устройству присущи следующие недостатки.
Невозможность обнаружения возникающих при передаче искажений без введения структурной избыточности в передаваемый сигнал, (т. е. без применения корректирующих кодов или кодов, обнаруживающих ошибки).
При этом существует низкая достоверность передачи информации и ее можно оценивать например, вероятностью появления необнаруженных искажений на приемной стороне (вероятностью ошибочного выделения сообщений). Это обусловлено недостаточно эффективным использованием потенциальных возможностей методов угловой модуляции колебаний при использовании только одного вида модуляции (частотной или фазовой).
Цель изобретения - повышение достоверности передачи информации.
Цель достигается тем, что в способе передачи сигналов, заключающемся в сборе сигналов от источников сообщений, синхронизации их по времени, формировании уплотненного сигнала из синхронизированных собранных сигналов, формировании сигнала первой несущей частоты, фазовой манипуляции сигнала несущей частоты уплотненным сигналом, передаче промодулированного сигнала по каналу связи, формируют сигнал второй несущей частоты, формируют периодическую последовательность импульсного сигнала типа меандр с длительностью импульсов в два раза меньшей минимальной длительности импульсов уплотненного сигнала, выполняют фазовую манипуляцию периодической последовательности импульсного сигнала уплотненным сигналом, выполняют фазовую манипуляцию сигнала другой несущей частоты уплотненным сигналом, после чего формируют подлежащий передаче по каналу связи промодулированный сигнал путем частотной манипуляции фазовоманипулированных сигналов первой и второй несущих частот импульсным сигналом фазовоманипулированной периодической последовательности.
В устройство для передачи информации, содержащее датчики цифровой информации, блок синхронизации, блок уплотнения сигналов, первый фазовый манипулятор и передатчик, выход которого является выходом устройства, выход блока синхронизации соединен с синхронизирующими входами датчиков цифровой информации и со входом блока уплотнения сигналов, выход блока уплотнения сигналов соединен с первым входом первого фазового манипулятора, введены инвертор, генератор колебаний, второй фазовый манипулятор, блок управления и блок комбинированной модуляции, выход каждого из датчиков цифровой информации соединен с соответствующим информационным входом блока уплотнения сигналов, выход которого соединен с первым входом второго фазового манипулятора, вход генератора колебаний соединен с выходом блока синхронизации, первый и второй выходы генератора колебаний соединены соответственно с вторыми входами фазовых манипуляторов, выход блока уплотнения сигналов соединен со входом инвертора и с первым входом блока управления и третьими входами фазовых манипуляторов соединен выход инвертора, первый и второй входы блока комбинированной модуляции соединены с выходами фазовых манипуляторов, синхронизирующий вход блока управления соединен с выходом блока синхронизации, выход блока управления соединен с третьим входом блока комбинированной модуляции, выход блока комбинированной модуляции соединен со входом передатчика.
Кроме того, блок управления выполнен в виде инвертора, двух элементов И и элемента ИЛИ, при этом первые входы первого и второго элементов И являются соответственно первым и вторым входами блока, второй вход первого элемента И соединен со входом инвертора и является синхронизирующим входом блока, выход инвертора соединен со вторым входом второго элемента И, первый и второй входы элемента ИЛИ соединены с выходами соответствующих элементов И, выход элемента ИЛИ является выходом блока.
Кроме того, фазовый манипулятор выполнен в виде инвертора, двух элементов И и элемента ИЛИ, при этом первый вход первого элемента И соединен со входом инвертора и является вторым входом блока, второй вход первого элемента И является первым входом блока, выход инвертора соединен с первым входом второго элемента И, второй вход которого является третьим входом блока, первый и второй входы элемента ИЛИ соединены соответственно с выходами первого и второго элементов И, выход элемента ИЛИ является выходом блока.
Кроме того, блок комбинированной модуляции выполнен в виде инвертора, двух элементов И и элемента ИЛИ, при этом первый вход первого элемента И является первым входом блока, первый вход второго элемента И является вторым входом блока, вход инвертора соединен со вторым входом первого элемента И и является третьим входом блока, выход инвертора соединен со вторым входом второго элемента И, первый и второй входы элемента ИЛИ соединены соответственно с выходом первого и с выходом второго элементов И, выход элемента ИЛИ является выходом блока.
Кроме того, генератор колебаний выполнен в виде задающего генератора и двух умножителей частоты, при этом синхронизирующий вход задающего генератора является синхронизирующим входом блока, выход задающего генератора соединен со входом и первого и второго умножителей частоты, выходы первого и второго умножителей частоты являются соответствующими выходами блока.
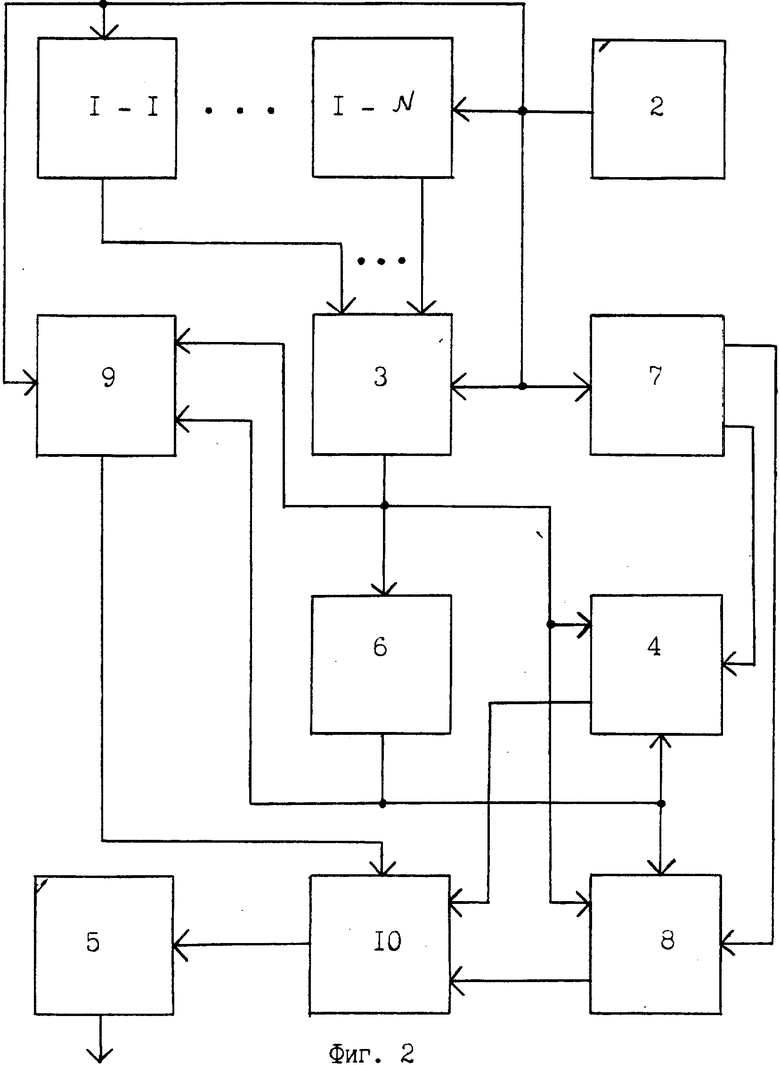
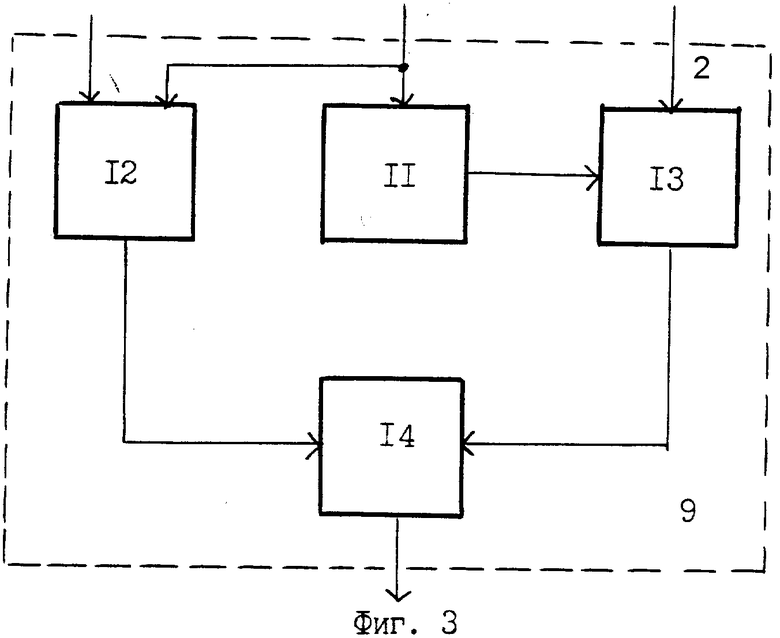
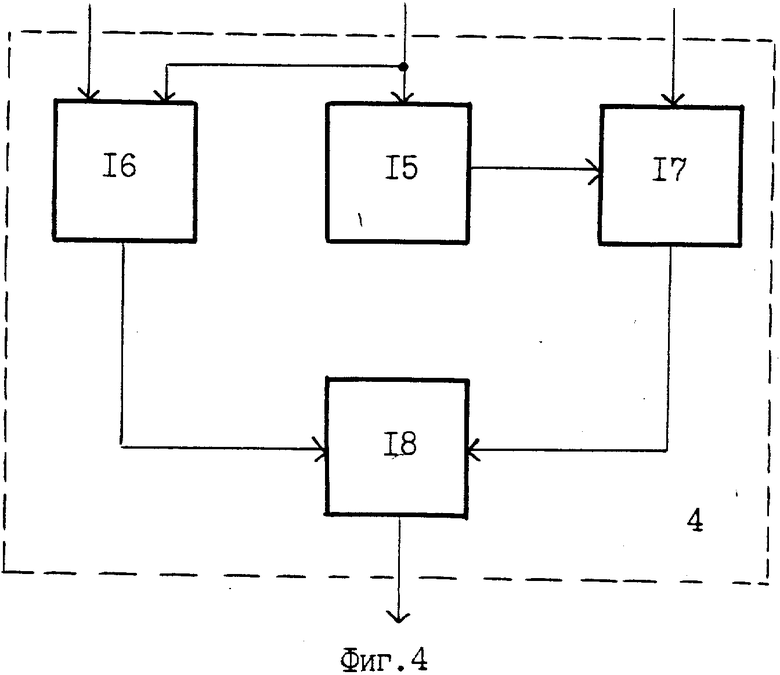
На фиг. 1, a - y представлены временные диаграммы, поясняющие способ и работу устройства; на фиг. 2 - функциональная схема устройства для передачи информации; на фиг. 3 - функциональная схема блока управления; на фиг. 4 - функциональная схема фазового манипулятора; на фиг. 5 - функциональная схема блока комбинированной модуляции; на фиг. 6 - функциональная схема генератора колебаний,
Способ включает следующие операции (фиг. 1).
Вначале собирают сигналы, сформированные датчиками, и синхронизируют собранные сигналы по времени. Затем уплотняют собранные сигналы, формируя таким образом уплотненный групповой информационный сигнал (фиг. 1,а), при этом интервалам, на которых передаются сигналы логической единицы, соответствуют высокий уровень напряжения, а сигналам логического нуля - низкий уровень. Затем формируют гармонический сигнал несущей частоты (фиг.1,д) и выполняют его фазовую манипуляцию (фиг. 1,н) уплотненным сигналом (фиг. 1, а).
Кроме того, формируют гармонический сигнал другой несущей частоты (фиг. 1, е) и выполняют его фазовую манипуляцию (фиг. 1,р) уплотненным сигналом (фиг. 1,а).
Затем формируют сигнал типа меандр в виде периодической последовательности импульсов с длительностью импульсов в два раза меньшей минимальной длительности импульса уплотненного сигнала (фиг. 1,в). При этом период следования импульсов сформированного сигнала в два раза превышает длительность импульсов (скважность равна двум). Выполняют фазовую манипуляцию (фиг. 1,и) сформированной последовательности импульсов (фиг. 1,в) уплотненным сигналом (фиг. 1,а).
Затем формируют подлежащий передаче по каналу связи промодулированный сигнал (фиг. 1,у). Для этого выполняют частотную манипуляцию фазовоманипулированных сигналов первой (фиг. 1,н) и другой (фиг. 1,р) несущих частот сигналом фазовоманипулированной периодической последовательности импульсов (фиг. 1,и).
Таким образом, в передаваемом по каналу связи сигнале (фиг. 1,у) информация о передаваемом сообщении будет содержаться в состоянии не одного информативного параметра у сигнала несущей (фазы или частоты), а двух параметров - и фазы, и частоты несущей. В связи с этим повышается достоверность передачи информации.
Это следует показать на примере сравнения с известным способом передачи, у которого по каналу связи передается фазовоманипулированный сигнал.
Пусть энергетический потенциал радиоканала (отношение сигнал/помеха) для обоих способов одинаков. Если помеха будет мощная, то произойдет искажение передаваемого сообщения. В известном способе возникшая ошибка останется необнаруженной. В предлагаемом способе возникшая ошибка будет обнаружена, поскольку в таких ситуациях в радиосигнале (фиг. 1,у) произойдет одновременное изменение и частоты и фазы несущей.
В неискаженном радиосигнале изменения параметров сигнала (частоты и фазы несущей) разнесены на строго фиксированное время, равное длительности импульсов сформированной периодической последовательности (фиг. 1,в).
При среднем уровне помех в известном способе будут происходить относительно редкие необнаруживаемые при приеме искажения. В предлагаемом способе также будут происходить редкие искажения или частоты, или фазы переданного в канал связи сигнала. Однако такие искажения можно обнаружить, выполняя на приемной стороне операции над принятым сигналом в последовательности, обратной выполнявшимся на передающей стороне. Анализируя полученные в результате обработки сигналы (фиг. 1,а,и) на взаимное соответствие, можно обнаружить появление одиночных искажений частоты или фазы, возникших при передаче сигнала.
При этом принципиально важно, что в предлагаемом способе даже при существенном уровне помех можно обнаруживать не только одиночные искажения символов в передаваемом сообщении, но и многократные искажения (по два и более искаженных символа в одном слове).
Кроме того, существенно, что в предлагаемом способе изменение фазы несущей в передаваемом сигнале соответствует моментам перехода от одного логического уровня подлежащего передаче сигнала (фиг. 1,а) к другому, а моменты изменения частоты (фиг. 1,у) смещены по времени на длительность одного импульса последовательности (фиг. 1, в). При этом каждый раз через интервалы времени, соответствующие длительности импульса последовательности (фиг. 1, в), в выходном сигнале (фиг. 1,у) изменяется или частота, или фаза несущей. Такая безызбыточная структура передаваемого сигнала позволяет обеспечить некоррелированность моментов изменения частоты и фазы без несущей. Поэтому введением структурной избыточности в одном канале связи удалось обеспечить такой эффект, который в известных способах может быть получен лишь при наличии двух независимых каналов связи.
Устройство для передачи информации (фиг. 2) содержит датчики 1 цифровой информации, блок 2 синхронизации, блок 3 уплотнения сигналов, фазовый манипулятор 4 и передатчик 5, выход которого является выходом устройства. Кроме того, инвертор 6, генератор 7 колебаний, другой фазовый манипулятор 8, блок 9 управления и блок 10 комбинированной модуляции. При этом выход блока 2 синхронизации соединен с синхронизирующими входами датчиков 1, блока 3 уплотнения сигналов, генератора 7 колебаний и блока 9 управления. Выход каждого из датчиков 1 соединен с соответствующим информационным входом блока 3 уплотнения сигналов. Первый и второй выходы генератора 7 колебаний соединены соответственно с первыми входами первого 4 и второго 8 фазовых манипуляторов. Выход блока 3 уплотнения сигналов соединен со входом инвертора 6, с первым входом блока 9 управления и со вторыми входами фазовых манипуляторов 4 и 8. Выход инвертора 6 соединен со вторым входом блока 9 управления и с третьими входами фазовых манипуляторов 4 и 8. Первый и второй входы блока 10 комбинированной модуляции соединены соответственно с выходами фазовых манипуляторов 4 и 8. Выход блока 9 управления соединен с третьим входом блока 10 комбинированной модуляции, выход которого соединен со входом передатчика 5.
Кроме того, блок 9 управления выполнен в виде инвертора 11, элементов 12, 13 И и элемента 14 ИЛИ. При этом первые входы элементов 12, 13 И являются соответственно первым и вторым входами блока. Второй вход первого элемента 12 И соединен со входом инвертора 11 и является синхронизирующим входом блока. Выход инвертора 11 соединен со вторым входом второго элемента 13 И. Первый и второй входы элемента 14 ИЛИ соединены с выходами элементов 12, 13 И соответственно. Выход элемента 14 ИЛИ является выходом блока.
Кроме того, фазовые манипуляторы 4 и 8 выполнены в виде инвертора 15, элементов 16, 17 И и элемента 18 ИЛИ. При этом первый вход первого элемента 16 И соединен со входом инвертора 15 и является первым входом блока. Второй вход первого элемента 16 И является вторым входом блока. Выход инвертора 15 соединен с первым входом второго элемента 17 И. Второй вход второго элемента 17 И является третьим входом блока. Первый и второй входы элемента 18 ИЛИ соединены соответственно с выходом первого 16 и с выходом второго 17 элементов И. Выход элемента 18 ИЛИ является выходом блока
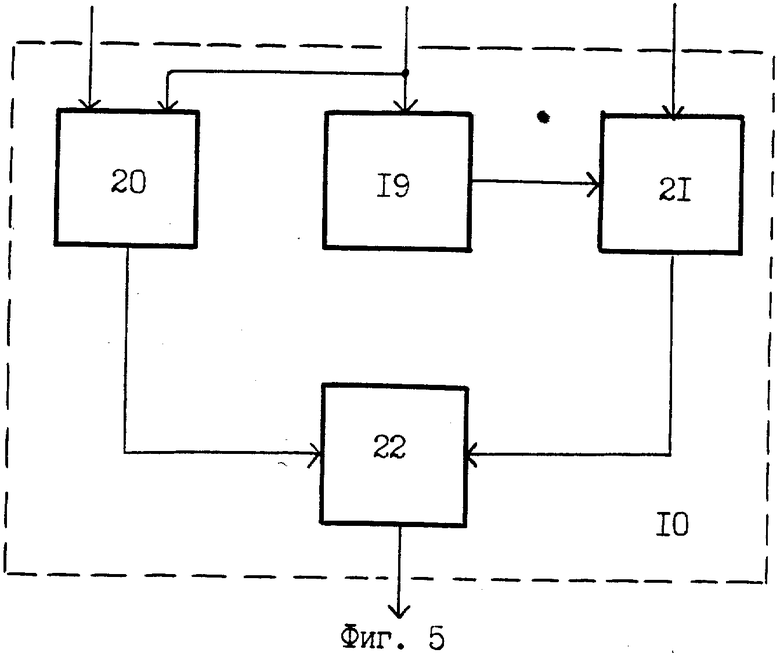
Кроме того, блок 10 комбинированной модуляции выполнен в виде инвертора 19, двух элементов 20, 21 И и элемента 22 ИЛИ. При этом первый вход первого элемента 20 И является первым входом блока. Первый вход второго элемента 21 И является вторым входом блока. Вход инвертора 19 соединен со вторым входом первого элемента 20 И и является третьим входом блока. Выход инвертора 19 соединен со вторым входом второго элемента 21 И. Первый и второй входы элемента 22 ИЛИ соединены соответственно c выходом первого 20 и с выходом второго 21 элементов И. Выход элемента 22 ИЛИ является выходом блока.
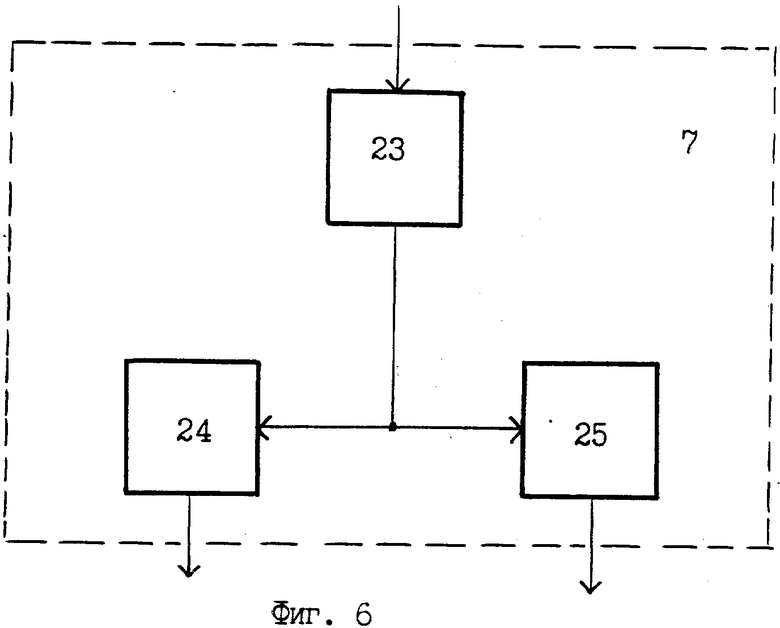
Кроме того, генератор 7 колебаний выполнен в виде задающего генератора 23 и двух умножителей 24, 25 частоты. При этом синхронизирующий вход задающего генератора 7 является синхронизирующим входом блока. Выход задающего генератора 7 соединен со входом первого 24 и со входом второго 25 умножителей частоты. Выходы умножителей 24 и 25 частоты являются соответственно первым и вторым выходами блока.
Устройство функционирует следующим образом.
Блоком 3 из сформированных датчиками 1 информационных сигналов формируют уплотненный информационный сигнал (фиг. 1,а).
Генератором 7 колебаний формируют два гармонических сигнала несущих с частотами f1 и f2 (фиг. 1,д,е). Сигналы несущих с выходов генератора 7 поступают на первые входы фазовых манипуляторов 4 и 8. На вторые входы фазовых манипуляторов поступает уплотненный информационный сигнал (фиг. 1,а) с выхода блока 3. На третьи входы фазовых манипуляторов поступает инвертированный информационный уплотненный сигнал (фиг. 1,б) с выхода инвертора 6. В соответствии с изменениями уровня напряжения уплотненного информационного сигнала (фиг. 1,а) выполняют манипуляцию фазы сигналов несущих (фиг. 2,д,е) в блоках 4 и 8 (фиг. 1н, р). Фазовоманипулированные сигналы несущих (фиг. 1н,р) с выходов блоков 4 и 8 поступают соответственно на первый и второй входы блока 10 комбинированной модуляции.
Блоком 9 управления из уплотненного информационного сигнала формируют сигнал (фиг. 1,и), который подают на третий вход блока 10 и используют для управления частотной манипуляцией фазовоманипулированных сигналов несущих (фиг. 1,н,р). Выходной сигнал блока 10 (фиг. 1,у) поступает на вход передатчика 5, которым усиливают мощность выходного сигнала до требуемого уровня. Выходным сигналом синхронизатора 2. (фиг. 1,в) синхронизируют работу датчиков 1, блоков 3, 7 и 9. В связи с этим синхронизированы по времени: выходные информационные сигналы датчиков, уплотненный информационный сигнал (фиг. 1, а), выходные сигналы (фиг. 1д,е) генератора несущих, фазовоманипулированные сигналы несущих на выходе блоков 4 и 8, выходной сигнал блока 9 (фиг. 1,и) - с выходным сигналом блока 10 (фиг. 1,у).
Блок 9 управления (фиг. 3) функционирует следующим образом.
На первый вход элемента 12 и поступает уплотненный информационный сигнал (фиг. 1, а) с первого входа блока. На первый вход элемента 13 И поступает инвертированный информационный сигнал (фиг. 1,б) со второго входа блока. На второй вход элемента 12 И и на вход инвертора 11 поступает синхронизирующий сигнал 1 (фиг. 1,в) с синхронизирующего входа блока. На второй вход элемента 13 И поступает инвертированный синхронизирующий сигнал (фиг. 1,г). Элементом 14 ИЛИ объединяют выходные сигналы элементов 12 И (фиг. 1,ж), 13 И (фиг. 1, з) в единый сигнал (фиг. 1,и). По существу выходной сигнал блока 9 (фиг. 1, и) представляет собой синхронизирующий сигнал (фиг. 1,в), подвергнутый фазовой манипуляции в соответствии с изменением уровня напряжения у уплотненного информационного сигнала (фиг. 1,а). Сигнал с выхода элемента 14 ИЛИ поступает на выход блока 9.
Фазовые манипуляторы 4 и 8 (фиг. 4) функционируют следующим образом.
Поступающий на вход блока 4 сигнал несущей (фиг. 1,д) подается на вход инвертора 15 и на первый вход элемента 16 И. Инвертированный сигнал несущей с выхода инвертора 15 поступает на первый вход элемента 17 И. На второй вход элемента 16 И поступает уплотненный информационный сигнал (фиг. 1,а) со второго входа блока. На второй вход элемента 17 И поступает инвертированный уплотненный информационный сигнал (фиг. 1,б) с третьего входа блока. На выход элемента 16 И сигнал (фиг. 1,л) несущей будет поступать только на тех временных интервалах, которым соответствует высокий уровень напряжения уплотненного сигнала (фиг. 1,а). На остальных временных интервалах будет присутствовать инвертированный сигнал несущей на выходе элемента 17 И (фиг.1, м). Аналогичные сигналы другой несущей будут проходить на выходы элементов 16, 17 И в блоке 8 (фиг. 1,о,п). Элементом 18 ИЛИ объединяют сигналы с выходов элементов 16, 17 И. На выход элемента 18 ИЛИ первого 4 и второго 8 блоков соответственно поступает фазовоманипулированный сигнал (фиг. 1,н) первой и (фиг. 1,р) второй несущей.
Блок 10 комбинированной модуляции функционирует следующим образом (фиг. 5).
На первый вход элемента 20 И поступает фазовоманипулированный сигнал (фиг. 1,н) первой несущей с первого входа блока. На первый вход элемента 21 И поступает фазовоманипулированный сигнал (фиг. 1.р) второй несущей со второго входа блока. На второй вход элемента 20 И и на вход инвертора 19 поступает управляющий сигнал (фиг. 1,и) с третьего входа блока. На второй вход элемента 21 И поступает инвертированный управляющий сигнал (фиг. 1,к). На выход элемента 20 И фазовоманипулированный сигнал (фиг. 1,с) первой несущей поступает на тех временных интервалах, которым соответствует высокий уровень напряжения управляющего сигнала (фиг.1,и). На остальных временных интервалах на выход элемента 21 И будет поступать фазовоманипулированный сигнал (фиг. 1, т) другой несущей. Элементом 22 ИЛИ объединяют выходные сигналы элементов 20 И, 21 И. Сигнал с выхода элемента 22 ИЛИ (фиг. 1,у) поступает на выход блока 10.
Генератор 7 колебаний функционирует следующим образом (фиг. 6).
Задающим генератором 23 формируют гармонический сигнал, частота колебаний которого синхронизирована с частотой следования импульсов сигнала (фиг. 1,в) синхронизатора 2. С выхода задающего генератора 23 сигнал подают на вход умножителя 24 и на вход умножителя 25. Сигналы с выхода умножителя 24 с частотой f1 и с выхода умножителя 25 с частотой f2 поступают на первый и второй выходы блока (фиг. 1,д,е) соответственно.
Датчики цифровой информации, синхронизатор, блок уплотнения (1, 3 и 4), генератор и передатчик [5 и 6] являются известными техническими решениями.
Известно [7] , что в гауссовских каналах связи ошибки при приеме элементарных символов в кодовой группе с простым кодированием можно считать независимыми, то есть вероятность искажения каждого из разрядов кодовой комбинации одинакова и постоянна. Для этого случая вероятность того, что среди кодовой комбинации длиной n-символов встретится ровно l ошибочных символов, может быть определена на основании формулы Бернулли
Pош(l) = C
где - число сочетаний из n по l, характеризующее число возможных положений l ошибочных символов в пределах n - разрядной комбинации (слова);
- число сочетаний из n по l, характеризующее число возможных положений l ошибочных символов в пределах n - разрядной комбинации (слова);
l - кратность ожидаемой ошибки.
В общем случае вероятность Pан появления ошибки в приеме кодового слова (вероятность того, что кодовая комбинация будет принята хотя бы с одной ошибкой) будет определяться следующим выражением [7]:
При
nPан<1 вероятность Pош(l) быстро уменьшается с ростом и подавляющую долю ошибок составляют одиночные ошибки. В этом случае предыдущее выражение хорошо аппроксимируется первым членом [7]
Pан≈ C
Из полученного выражения видно, что Pан в основном зависит от качества канала связи, характеризуемого вероятностью Pош искажения элементарного символа, и длины кодового слова n.
В предлагаемом изобретении сигналы предлагается передавать так, что на приемной стороне можно обнаружить как одиночные, так и кратные ошибки (искажения l≥1 элементарных символов), поэтому вероятность появления необнаруженных ошибок Pош в приеме кодового слова не будет зависеть от длины n слова, а будет зависеть только от состояния канала связи (характеризуемого вероятностью Pош) и будет существенно меньше, чем у известных технических решений (при прочих равных условиях).
Таким образом, предлагаемое изобретение позволяет:
обнаруживать возникающие при передаче как одиночные, так и кратные ошибки без введения структурной избыточности (дополнительных символов) в передаваемое сообщение;
повысить эффективность методов угловой модуляции. Благодаря этому при одном и том же отношении сигнал/шум можно существенно повысить достоверность передачи информации, так как уменьшается количество необнаруженных на приемной стороне ошибок;
повысить скорость передачи информации.
В целом существенно повышается эффективность использования канала, особенно в тех случаях, когда предъявляются жесткие требования к энергетике и массе передающих устройств, а также снижаются затраты на передачу информации и повышается скорость передачи информации при фиксированном качестве приема.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПЕРЕДАЧИ ИНФОРМАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2461888C2 |
| СПОСОБ ПЕРЕДАЧИ ИНФОРМАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2556439C2 |
| СПОСОБ ПЕРЕДАЧИ ИНФОРМАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2475861C1 |
| СПОСОБ ПЕРЕДАЧИ ИНФОРМАЦИИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2480840C2 |
| Способ передачи и устройство для его реализации | 2019 |
|
RU2733724C1 |
| СПОСОБ ПЕРЕДАЧИ ИНФОРМАЦИИ С ИСПОЛЬЗОВАНИЕМ ЗАМЕЩАЮЩЕГО ЛОГИЧЕСКОГО ТРОИЧНОГО ПОМЕХОУСТОЙЧИВОГО КОДА | 2019 |
|
RU2724794C1 |
| СПОСОБ ПЕРЕДАЧИ ИНФОРМАЦИИ С ИСПОЛЬЗОВАНИЕМ ЗАМЕЩАЮЩЕГО ЛОГИЧЕСКОГО ТРОИЧНОГО ПОМЕХОУСТОЙЧИВОГО КОДА | 2020 |
|
RU2735419C1 |
| СПОСОБ ПЕРЕДАЧИ ИНФОРМАЦИИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2586833C1 |
| Устройство для передачи дискретной информации | 1984 |
|
SU1202065A1 |
| МНОГОКАНАЛЬНАЯ ЦИФРОВАЯ СИСТЕМА ПЕРЕДАЧИ И ПРИЕМА ИНФОРМАЦИИ | 1990 |
|
RU2013012C1 |
Изобретение относится к телеметрии, технике связи и может быть использована в системах передачи по каналам связи и позволяет повысить достоверность передачи информации без введения структурной избыточности в передаваемые сообщения, обнаруживать возникающие при передаче как одиночные, так и кратные ошибки, повысить скорость передачи информации. Это достигается путем выполнения комбинированной угловой модуляции несущей передаваемым сообщением, включающим фазовую и частотную манипуляцию. Датчиками формируют передаваемые сообщения. После синхронизации и уплотнения сообщений формируют управляющий сигнал. Уплотненным сигналом управляют фазовой манипуляцией несущей, а сформированным управляющим сигналом - частотной манипуляцией несущей. 2 с. и 4 з.п. ф-лы, 6 ил.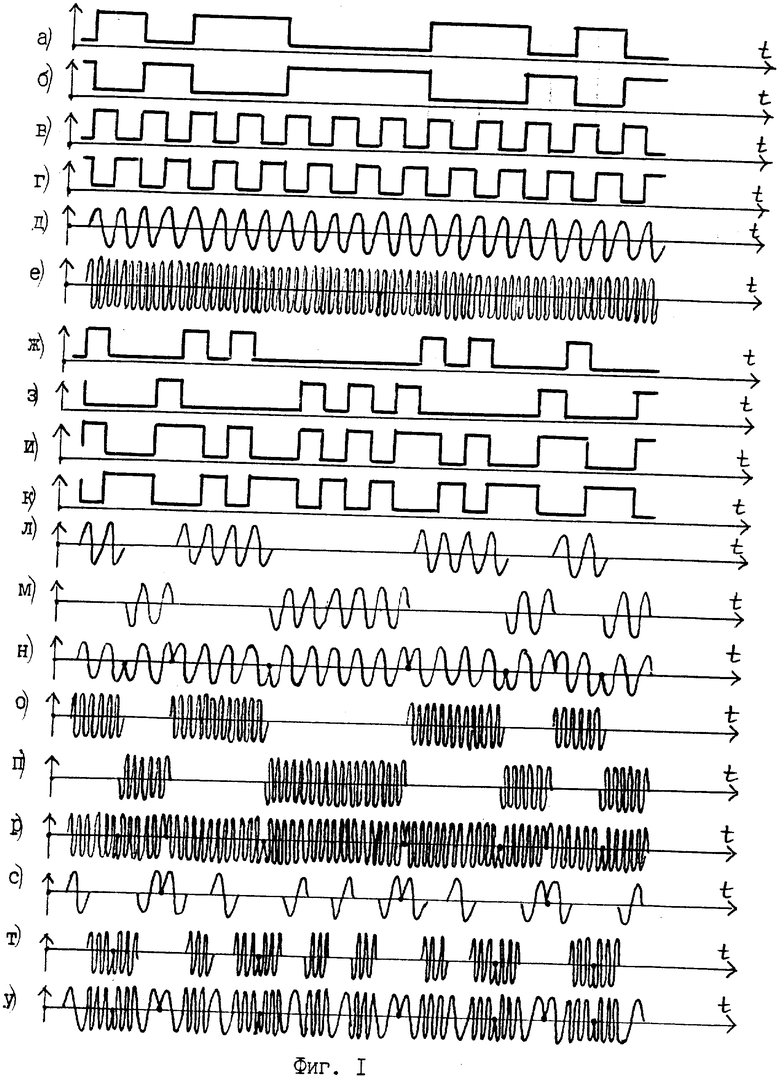
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Кошевой А.А | |||
| Телеметрические комплексы летательных аппаратов | |||
| - М.: Ма шиностроение, 1975, с.176-181 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Асинхронный двигатель с маховиком | 1924 |
|
SU1487A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Барсуков Ф.И | |||
| и др | |||
| Элементы и устройс тва радио телеметрических систем | |||
| - М.: Энергия, 1973, с.28 - 114, 128 - 205, 238 - 252 | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Справочник по радиоэлектронным системам | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| - М.: Энергия, 1979, с.305 - 344 | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Справочник по радиоэлектронным ус тройствам./Под ред.Д.П.Линде | |||
| - М.: Энергия, 1 978, с.222 - 324 | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Дробов С.А | |||
| и др | |||
| Радиопередающие устройства | |||
| - М .: Советское радио, 1968 | |||
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| Нов оселов О.Н | |||
| и др | |||
| Основы теории и рас чета информационно-измерительных сист ем | |||
| - М.: Машиностроение, 1991, с.216. | |||
