Изобретение относится к грузозахватным устройствам для грузов с центральным отверстием и может быть использовано в любом производстве, где есть необходимость транспортировки и кантования грузов с центральным отверстием (крупногабаритных бандажей, втулок и т.п.).
Известно устройство захват-кантователь для изделий со сквозным отверстием, содержащее серьгу, состоящее из верхней и нижней частей, отделенных между собой через подпружиненный шток и независимые гидравлические амортизаторы и пружинно-гидравлические ограничители. Устройство включает захватные лары, смонтированные на штангах, взаимодействующих через звездочки с мотором-редуктором [1].
Устройство позволяет уменьшить динамические нагрузки при кантовке, но чрезвычайно сложное и неприемлемое для условий индивидуального производства, в частности тяжелого машиностроения.
Многие недостатки последнего исключает устройство [2], которое содержит грузовую подвеску с несущей осью, подвешенную к ней C-образную скобу и установленный на скобе упор, винтовой прижим и приспособление для кантования груза.
По периметру скобы выполнен фигурный паз с углублениями для оси подвески, а в верхней части скобы установлена с возможностью перемещения штанга, на которой шарнирно закреплен поворотный упор.
Устройство обеспечивает транспортировку и кантование груза с центральным отверстием из горизонтального и вертикального положений. Винтовой прижим позволяет производить строповку грузов с различной толщиной стенки. Однако устройство имеет следующий недостаток - низкая производительность, обусловленная тем, что винтовой прижим требует настройки при каждом цикле работы, а работы с прижимом выполняются внутри груза, что приводит к большим затратам времени. Низкая надежность при кантовании, так как конструкция выдвижной штанги с поворотным упором не обеспечивает полный обхват стенки груза, а конструкция скобы не имеет упоров, центрирующих положение груза относительно устройства, что приводит к возникновению дополнительных крутящих и изгибающих нагрузок.
Указанные недостатки исключает устройство для выполнения операций транспортировки и кантования грузов с центральным отверстием [3], принятое за прототип, которое содержит П-образный корпус с неподвижным и подвижным прижимами. В средней части прижима установлен упор, образующий коромысло с рабочими поверхностями. На горизонтальном участке корпуса установлена втулка подпятник, в которой с возможностью поворота расположен несущий вал прижима. Последний жестко закреплен на несущем валу. В нижней части неподвижного прижима расположена поворотная подхватная лапа, снабженная рабочим зубом. В нижней части вертикального участка корпуса выполнено гнездо, в которое при замыкании зева входит рабочий зуб. Подхватная лапа и подвижный прижим фиксируются в рабочем положении пальцами фиксатора. Несущий вал выполнен в виде кулачка с сечением многогранника с чередующимися смежными прямыми участками и дугами, которые являются рабочими, контактными с участками груза.
Указанное устройство решает задачу кантования груза типа бандажа, кольца и т. п. Однако при применении грузоподъемностью от 5 т и выше и высотой изделия более 1000 мм имеет следующие недостатки:
- подвижный прижим, выполненный в виде цельного эксцентрика, достигает значительную массу, что требует достаточно больших усилий рабочего при повороте для установки в открытое и рабочее положение;
- несущий вал образует в зоне смонтированного на нем подвижного прижима консоль, что при динамических нагрузках кантования приводит к остаточным деформациям от изгиба;
- контакт подвижного прижима с изделием происходит на незначительном участке в верхней части. Средняя и нижняя части груза как бы свободны. В результате возникает значительный изгибающий момент в зоне условной заделки (в верхней части), что особенно усугубляется при относительно большой высоте изделия.
Предлагаемый согласно настоящему изобретению захват для грузов цилиндрической формы с центральным отверстием не имеет указанных недостатков.
Техническим результатом настоящего изобретения является снижение массы подвижного прижима, увеличение жесткости, а следовательно, долговечности и улучшение условий эксплуатации.
Указанный результат достигается новым конструктивным исполнением устройства. Сущность изобретения заключается в том, что для достижения указанной цели в предлагаемом устройстве, а именно:
Захват-кантователь для грузов цилиндрической формы с центральным отверстием, состоящий из двух фигурных рам, на одной из которых установлены неподвижный прижим со смонтированной на нем поворотной подхватной лапой и фиксатором рабочего положения, с узлом регулирования и фиксации, подвижный прижим для взаимодействия с внутренней цилиндрической поверхностью груза, связанные с корпусом грузовые петли для навешивания на крюк грузоподъемной машины, отличается тем, что:
- другая рама корпуса со стороны крепления подвижного прижима выполнена L-образной, внутренняя ее вертикальная часть выполнена с чередующимися выступами и впадинами, при этом на выступах расположены подшипники, а в нижней горизонтальной части установлена пята подпятника, ось которого совпадает с осью вала;
- упомянутый вал выполнен разъемным в виде собственно вала, смонтированного в подшипниках и опирающегося на пяту подпятника, и приводного вала, который снабжен в нижней части проушиной в виде вилки, взаимодействующей с лопаткой упомянутого собственного вала, при этом подвижный прижим выполнен в виде отдельных дисков-кулачков, которые жестко расположены на собственно валу.
Из источников уровни науки и техники известны по терминологии отдельные элементы, заложенные в перечисленные признаки.
Например, элемент внутренней поверхности вертикального корпуса, выполненный из чередующихся впадин и выступов, аналогично гофрам, довольно широко применяющихся на стенках складов, тары и т.п. Их применение способствует увеличению жесткости стенок. В рассматриваемом случае впадины выполнены для компактности конструкции, т.к. в них располагаются части дисков, не находящихся в контакте с изделиями, а на выступах - корпуса подшипников для установки несущего вала (собственно вала), что также приводит к компактности конкретного устройства, т.е. преследует иные цели и технически неравнозначны. В нижней горизонтальной части вертикального корпуса установлена пята подпятника. В принципе опора на пяту подпятника известна в практике широко. Однако в данном случае применение подпятника исключает вертикальную нагрузку на корпуса подшипников или сложную конструкцию опоры со статически неопределимой системой.
Наконец, разъемный вал включает свободное соединение проушины в виде вилки приводного вала с лопаткой собственно вала. Подобное соединение в практике известно из кулачковых муфт и карданного вала. Но в отличие от них он упрощен, т. к. не предназначен для работы в периодическом цикле передачи силового крутящего момента, а лишь использован для частного поворота подвижного прижима на незначительный угол, а затем находится в стационарно-зафиксированном состоянии с достаточным зазором соединения между лопаткой и вилкой.
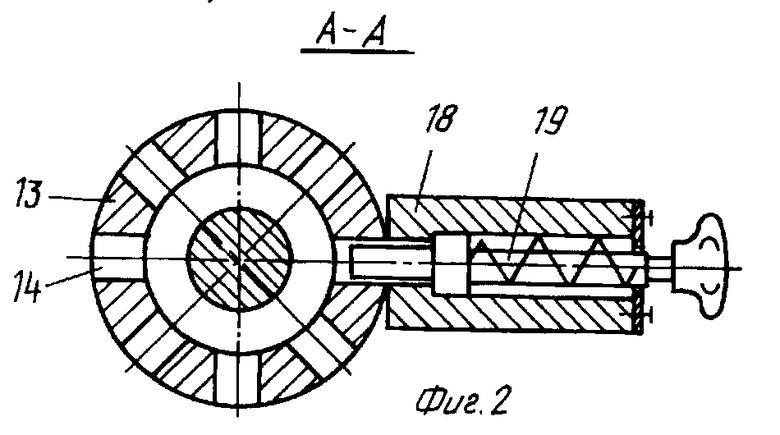
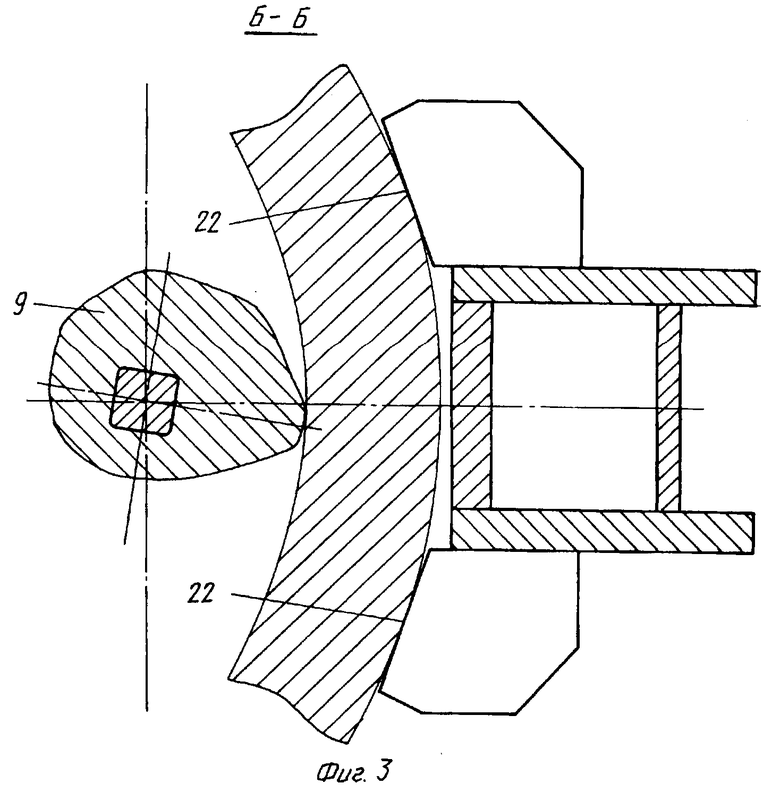
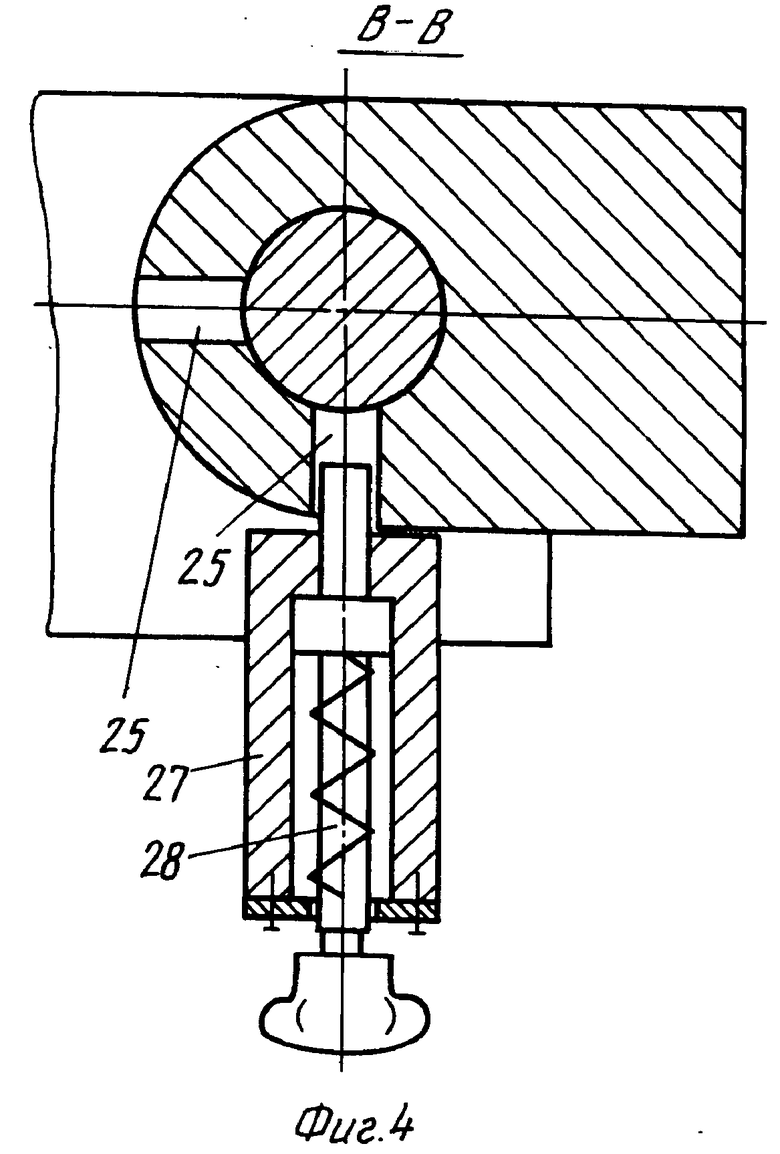
Сущность предлагаемого изобретения поясняется примером конкретного исполнения и чертежом, на котором изображен: фиг. 1 - общий вид захват-кантователя; фиг. 2 - разрез А-А на фиг. 1; фиг. 3 - разрез Б-Б на фиг. 1; фиг. 4 - разрез В-В на фиг. 1.
Захват-кантователь для грузов с центральным отверстием содержит корпус, состоящий из двух фигурных рам: L-образного вида 1 и Г-образного вида 2. Соответственно на каждой раме смонтированы грузовые петли 3. На вертикальной раме 1 с внутренней части выполнены впадины 4 и выступы 5. На последних расположены подшипники 6, в которые установлен собственно вал 7. На горизонтальном участке рамы 1, с внутренней стороны установлена пята подпятника 8, на которую опирается нижний торец собственно вала 7.
Подвижный прижим выполнен в виде дисков-кулачков 9 с сечением многогранника с чередующимися смежными прямыми участками и дугами. Последние являются рабочими контактными участками при взаимодействии с поверхностью груза. Диски-кулачки 9 жестко смонтированы на собственно валу 7 с интервалами по его длине, соосно осям 10 впадин 4. На верхнем конце собственно вала 7 установлена лопатка 11.
Приводной вал 12 расположен с возможностью поворота во втулке 13, которая установлена на горизонтальном участке Г-образной рамы 2 с внешней стороны соосно собственно валу 7. В этой части приводного вала 12 выполнены равномерно расположенными по диаметру отверстия 14, выполняющие функции стопорных пазов. Верхняя часть снабжена пазом 15 U-образного вида, в котором, например, на рукоятке 16 установлена дополнительная грузовая петля 17, предназначенная для транспортирования самого устройства и наведения для захвата стенки груза, расположенного в вертикальном положении.
Сбоку на том же горизонтальном участке установлен направляющий элемент 18, в котором размещен подпружиненный палец 19. Ось пальца перпендикулярна оси поворота приводного вала 12 и соосна осям отверстий 14, ориентируемым в смежном положении.
Каждое отверстие, в свою очередь, соориентировано соответственно дуге (эксцентрику) диска-кулачка 9. В нижней части приводной вал 12 снабжен проушиной в виде вилки 20, взаимодействующей с лопаткой 11 собственного вала 7 как разъемное соединение.
Неподвижный прижим расположен на вертикальном участке Г-образной рамы 2 и выполнен из ряда упоров 21 в виде призмы 22, охватывающих стенку груза симметрично по обе стороны по отношению к вертикальной оси зоны захвата.
В нижней части вертикального участка Г-образной рамы 2 установлена подхватная лапа 23 с рабочим зубом 24, который расположен эксцентрично оси упомянутой лапы, а в верхней ее части во взаимно перпендикулярном направлении выполнены два отверстия 25. В нижней части на торце сбоку L-образной рамы 1 выполнено гнездо 26, в которое при повороте и замыкании зева входит рабочий зуб 24, тем самым обеспечивая надежность при транспортировке и кантовании груза. Сбоку, в поперечном направлении закреплен направляющий элемент 27, в котором размещен подпружиненный палец 28. Ось пальца 28 перпендикулярна оси поворота подхватной лапы и взаимодействует с одним из двух отверстий 25 в режиме стопора.
Захват-кантователь работает следующим образом.
Для захвата прежде всего необходимо открыть зев захвата-кантователя, оттягивая рукоятку пальца 28 подхватной лапы 23, вращая ее на 90o до входа пальца в соответствующее отверстие 25. Зев открыт. Эту операцию производят либо на полу цеха, а если не представляется возможным, то при подвесе захвата-кантователя на одну из трех грузовых петель 3 и 17. До упомянутого, либо после производится настройка на соответствующую стенку захватываемого груза. Для этого оттягивают подпружиненный палец 19 и рукояткой 16 поворачивают подвижный прижим, выбирая до минимума зазор между рабочей поверхностью кулачка 9 и стенкой груза и фиксируя палец 19 в соответствующем отверстии 14.
Манипуляции с захватом-кантователем производятся при двух исходных положениях груза: груз расположен на образующей в горизонтальном положении и груз расположен на торце (образующей - в вертикальном положении). Рассмотрим работу для каждого исходного положения груза.
Груз расположен на образующей. Захват-кантователь подвешивается на крюк крана за грузовую петлю 3 со стороны рамы Г-образного вида 2 и заводится на стенку груза типа втулки, расположенную в горизонтальном положении так, чтобы гнездо 26 выходило за торец груза. После этого поворачивают подхватную лапу 23 и рабочий зуб 24, перекрывают зев захвата-кантователя, предотвращая возможность выпадения груза. После этого крюк перецепляют с грузовой петли и накидывают на него грузовую петлю 3, расположенную в верхней части рамы L-образного вида 1. При последующем подъеме производится кантовка груза в вертикальное положение и установка его, например, на подкладки поддона для термической обработки. Поворачивая подхватную лапу и рабочий зуб на 90o, открывают зев. Перецепляют крюк крана на дополнительную грузовую петлю 17, которая расположена по оси симметрии захвата-кантователя, и выводят его из взаимодействия со стенкой груза.
При необходимости кантовки груза из вертикального положения в горизонтальное (установка на образующую груза) процесс производят в обратном порядке.
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват-кантователь для грузов цилиндрической формы с центральным отверстием | 1989 |
|
SU1668272A1 |
| ГРУЗОВАЯ СКОБА | 1994 |
|
RU2123969C1 |
| РАЗГРУЗОЧНОЕ УСТРОЙСТВО АГЛОМЕРАЦИОННЫХ И ОБЖИГОВЫХ МАШИН КОНВЕЙЕРНОГО ТИПА | 1994 |
|
RU2086870C1 |
| УСТРОЙСТВО ДЛЯ УДАЛЕНИЯ ПЫЛИ ИЗ ГАЗОХОДА АГЛОМЕРАЦИОННОЙ И ОБЖИГОВОЙ МАШИНЫ | 1995 |
|
RU2096711C1 |
| УСТРОЙСТВО УРАВНОВЕШИВАНИЯ ВЕРХНЕГО ВАЛКА РАБОЧЕЙ КЛЕТИ ПРОКАТНОГО СТАНА | 1994 |
|
RU2094143C1 |
| УПОР ДЛЯ ОСТАНОВКИ ПАКЕТА ЛИСТОВ НА РОЛЬГАНГЕ | 1989 |
|
RU2019327C1 |
| ДВУХКЛАПАННЫЙ ЗАТВОР | 1997 |
|
RU2132027C1 |
| ЗАХВАТ-КАНТОВАТЕЛЬ | 2008 |
|
RU2376236C1 |
| ПЕТЛЕВОЙ АККУМУЛЯТОР ПОЛОСЫ | 1990 |
|
RU2014921C1 |
| УСТРОЙСТВО ДЛЯ СБОРА ВИТКОВ ПРОВОЛОКИ В БУНТ | 1992 |
|
RU2015766C1 |
Захват-кантователь предназначен для грузов с центральным отверстием и содержит корпус с рамами L-образного и Г-образного вида. Внутренняя вертикальная часть рамы L-образного вида выполнена с чередующимися выступами и впадинами, при этом на выступах расположены подшипники, в которых установлен вал, нижний торец которого опирается на пяту подпятника, расположенную на горизонтальном участке рамы L-образного вида. В нижней части на торце сбоку L-образной рамы выполнено гнездо, в которое может входить зуб подхватной лапы. Подвижный зажим выполнен в виде диска-кулачка с сечением в виде многогранника, поверхности которого являются рабочими контактными участками при взаимодействии с поверхностью груза. Диски-кулачки жестко смонтированы на упомянутом выше валу. На горизонтальном участке Г-образной рамы расположен приводной вал, установленный во втулке. В этой части приводного вала выполнены равномерно расположенные по диаметру отверстия, выполняющие функции стопорных пазов. Изобретение позволяет снизить массу, увеличить жесткость и долговечность. 4 ил.
Захват - кантователь для грузов цилиндрической формы с центральным отверстием, содержащий корпус, состоящий из двух фигурных рам, на одной из которых установлены неподвижный прижим, поворотная подхватная лапа и фиксатор рабочего положения с узлом регулирования и фиксации, вал, подвижный прижим для взаимодействия с внутренней цилиндрической поверхностью груза и связанные с корпусом грузовые петли для навешивания на крюк грузоподъемной машины, отличающийся тем, что другая рама корпуса со стороны крепления подвижного прижима выполнена L-образной, внутренняя ее вертикальная часть выполнена с чередующимися выступами и впадинами, при этом на выступах расположены подшипники, а в нижней горизонтальной части установлена пята подпятника, ось которого совпадает с осью вала, упомянутый вал выполнен разъемным в виде собственно вала, смонтированного в подшипниках и опирающегося нижним торцом на пяту подпятника, и приводного вала, который снабжен в нижней части проушиной в виде вилки, взаимодействующей с лопаткой собственно вала, причем подвижный прижим выполнен в виде отдельных дисков-кулачков, которые жестко установлены на собственно валу.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| SU, авторское свидетельство 587075, B 66 C 1/22, 1978 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| SU, авторско е свидетельство 906894, B 66 C 1/30, 1982 | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| SU, авторское свидетельство 1668272, B 66 C 1/54, 1991. | |||

