Изобретение относится к области вибрационного транспортирования и может быть использовано в различных областях народного хозяйства.
Известны механизмы вибрационного транспортирования штучных грузов, включающие данный груз, установленный на грузонесущем органе, соединенном с источником возмущающих колебательных воздействий (см. Спиваковский А.О. и др. Вибрационные конвейеры, питатели и вспомогательные устройства.- М.: Машиностроение, 1972, с.8 [1]). При этом возмущающие воздействия должны быть либо ориентированы под заданным углом к грузонесущей поверхности, либо содержать постоянную составляющую, носить круговой характер, быть одновременно ориентированы вдоль разных осей и т.п.
Однако данные механизмы характеризуются значительной сложностью, высокими энергозатратами, ограниченными функциональными возможностями.
Известен также механизм вибрационного перемещения, включающий объект с верхней и нижней опорами и вибровозбудитель, установленный со смещением относительно опор /см. а.с. СССР N 1392004, B 65 G 27/00, 1988 [2]/ .
Однако данный механизм обеспечивает только микроперемещения объекта и для вибротранспортирования практически не пригоден. Кроме того, вследствие специфичности конструкции механизм имеет предельно ограниченные функциональные возможности.
Известен также механизм вибрационного транспортирования штучных предметов, содержащий транспортируемый предмет, упруго защемленный между двумя грузонесущими вибрирующими поверхностями, освобождающими предмет от защемления в моменты достижения им максимальной скорости /см. а.с. СССР N 659473, B 65 C 27/04, 1979 [3]/.
Однако, данный механизм характеризуется значительной сложностью как конструкции, так и схемной реализации, регулировки и эксплуатации, а также сравнительно малой эффективностью, и имеет специфическое применение.
Наиболее близким устройством того же назначения к заявленному изобретению по совокупности признаков является механизм вибрационного перемещения, состоящий из установленного на шероховатой плоскости тела с подвешенным на нем физическим маятником /см. Блехман И.Н., Джанелидзе Г.Ю. Вибрационное перемещение. - М. : Наука, 1964, с. 294-299 [4]/, и принятое за прототип. При этом плоскость наклонена под углом α к горизонту и совершает прямолинейные гармонические колебания, направленные под углом β к плоскости. Механизм данного типа актуален, например, в питателях, служащих для равномерной подачи ориентированных деталей в станках-автоматах [4], c.397-399.
К причинам, препятствующим достижению указанного ниже технического результата при использовании известного устройства, принятого за прототип, относится то, что данный механизм малоэффективен, требует значительных энергозатрат. Как указано в [4] на с. 298-299, для приведения тела с физическим маятником в действие относительно вибрирующей плоскости при прочих равных условиях необходимы значительно более интенсивные вибрации, чем для осуществления той же задачи в случае одного тела /в частности, здесь же в примере показано, что указанное превышение амплитуды виброускорения плоскости должно быть четырехкратным/. Кроме того, необходимость сообщения вибраций под углом к плоскости ограничивает возможности использования данного механизма.
Таким образом, все известные механизмы виброперемещения либо характеризуются сложностью и специфичностью конструкции, либо предъявляют предельно высокие требования к возмущающим воздействиям по амплитуде, направлениям воздействий относительно плоскости вибротранспортирования, фазности, одновременности действия по разным осям и т.п. Все это увеличивает энергетические затраты и сужает функциональные возможности известных устройств.
Идеальным вариантом была бы возможность создания механизма виброперемещения по горизонтали и вверх по наклонной плоскости при действии элементарных прямолинейных гармонических колебаний сравнительно малой амплитуды в любом направлении, в том числе - и в плоскости движения объекта. Кроме того, в этом случае появляется возможность использования для виброперемещения случайных паразитных вибраций, возникающих, например, при работе двигателей, станков и т.п., что привело бы к значительной экономии энергии.
Сущность изобретения заключается в получении однонаправленного интенсивного перемещения объекта при действии вибраций за счет создания в полупериоды однонаправленного действия внешних вибраций минимального трения скольжения между объектом и вибрирующей поверхностью путем "подвешивания" объекта на жидкостной подушке.
Технический результат - уменьшение энергозатрат на виброперемещение и расширение функциональных возможностей механизма.
Указанный технический результат при осуществлении изобретения достигается тем, что в известном механизме вибрационного перемещения, включающем транспортируемый объект с инерционным грузом, установленный на немагнитной поверхности, соединенной с источником возмущения колебательных воздействий, особенность заключается в том, что инерционный груз представляет собой поршень, свободно установленный в выполненном в объекте резервуаре, частично заполненном ферромагнитной жидкостью, при этом в нижней части объекта вблизи места его контакта с вибрирующей поверхностью выполнены углубления с установленными в них П-образными постоянными магнитами, соединенные каналами с резервуаром.
Сущность изобретения поясняется чертежом, где схематично изображен предлагаемый механизм вибрационного перемещения с поперечным центральным разрезом.
Механизм вибрационного перемещения содержит немагнитный транспортируемый объект 1, установленный на также немагнитной поверхности 2, соединенной с источником возмущающих колебательных воздействий / на чертеже источник не показан/. На объекте 1 установлен инерционный груз, представляющий собой дискообразный поршень 3, свободно установленный по ходовой посадке в выполненном в объекте 1 цилиндрическом резервуаре 4, частично, по одну сторону от поршня 3 заполненном ферромагнитной жидкостью 5 /магнитной жидкой смазкой/. В нижней части объекта 1, вблизи места его контакта с поверхностью 2, выполнены прямоугольные призматические углубления 6 с установленными в них П-образными магнитами 7, причем полюса N, S магнитов 7 обращены к поверхности 2 и несколько утоплены в углубления 6, не доходя до наружной поверхности объекта 1, контактирующей с поверхностью 2. Углубления 6 соединены в донной части с заполненной ферромагнитной жидкостью 5 частью резервуара 4 каналами 8, причем для попадания жидкости 5 в межполосное пространство магнитов 7 в верхней части каждого из последних выполнено отверстие 9. Контактирующая с поверхностью 2 поверхность 10 объекта 1 выполнена со значительным коэффициентом трения либо путем нанесения микронеровностей /обработка наждаком/, либо путем нанесения тонкого слоя резины.
Работа устройства осуществляется следующим образом.
Пусть в первый полупериод внешняя вибрация, приложенная к поверхности 2, направлена, например, влево /см. чертеж/. При этом механизм 1 также стремится сместиться влево, поршень 3 за счет инерционных сил смещается относительно резервуара 4 вправо, ферромагнитная жидкость 5 за счет возникающего давления как бы выпучивается из межполюсного пространства магнитов 7, образуя полукруглые мениски, однако удерживаясь в таком состоянии силами магнитного притяжения /значительный эффект происходит в магнитожидкостных уплотнениях/. Конечно, соотношение сил инерции, объема жидкости 5, сил магнитного притяжения должно быть подобрано таким образом, чтобы жидкость 5 своим мениском выступила за плоскость 10 механизма 1, однако не оторвалось бы от магнитов 7, преодолев силы магнитного притяжения. Получается, что механизм 1 в данный полупериод вибрации оказывается как бы подвешенным на поверхности 2. на жидкостной подушке, при этом трение минимально, и при смещении поверхности 2 влево механизм 1 остается практически неподвижным. Во второй полупериод при действии внешней вибрации вправо поверхность 2 также идет вправо, поршень 3 по инерции идет влево относительно резервуара 4, давление на магнитную жидкость 5 уменьшается и жидкость 5 уходит в полостях 6 в межполюсное пространство магнитов 7, мениски при этом исчезают, трение между контактирующими поверхностями 2 и 10 значительно, и механизм 1 смещается вправо вместе с поверхностью 2. Таким образом, за период действия вибрации механизм 1 получает постоянную составляющую, направленную вправо, в результате чего под действием вибрации происходит однонаправленное интенсивное поступательное перемещение механизма 1 вправо вдоль линии действия вибрации. При развороте механизма на 180o либо при таком же изменении фазы внешней вибрации направление движения механизма изменяется на противоположное.
Очевидно, что работа предлагаемого механизма не зависит от характера вибраций как по направлению, так и по причине их возникновения. Возможна работа механизма при действии случайных паразитных вибраций, при вибрациях, действующих как в плоскости движения объекта, так и под углом к данной плоскости, что предельно расширяет функциональные возможности механизма. Необходимый подбор таких параметров механизма, как масса инерционного тела, объем и магнитные свойства ферромагнитной жидкости, геометрические характеристики резервуара и каналов, геометрические и магнитные характеристики постоянных магнитов и т.д., позволяет обеспечить интенсивное направленное движение механизма при сравнительно малых амплитудах виброускорений внешних вибраций, что значительно уменьшает энергозатраты на виброперемещение.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВИБРАЦИОННОЕ ТРАНСПОРТНОЕ УСТРОЙСТВО | 1996 |
|
RU2121954C1 |
| МЕХАНИЗМ ВИБРАЦИОННОГО ПЕРЕМЕЩЕНИЯ | 1996 |
|
RU2116951C1 |
| МЕХАНИЗМ ВИБРАЦИОННОГО ПЕРЕМЕЩЕНИЯ | 2000 |
|
RU2181687C1 |
| ВИБРОДВИЖИТЕЛЬ ДЛЯ ПЕРЕМЕЩЕНИЯ ПО ФЕРРОМАГНИТНОЙ ПОВЕРХНОСТИ | 2000 |
|
RU2172696C1 |
| УСТРОЙСТВО ДЛЯ ВИБРАЦИОННОГО ТРАНСПОРТИРОВАНИЯ | 2000 |
|
RU2166470C1 |
| УСТРОЙСТВО ДЛЯ ВИБРАЦИОННОГО ТРАНСПОРТИРОВАНИЯ | 1999 |
|
RU2165385C1 |
| УСТРОЙСТВО ДЛЯ ВИБРАЦИОННОГО ТРАНСПОРТИРОВАНИЯ | 1999 |
|
RU2149815C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ВНУТРИ ТРУБОПРОВОДА | 1999 |
|
RU2161752C1 |
| УСТРОЙСТВО ДЛЯ ВИБРОАКУСТИЧЕСКОГО КОНТРОЛЯ КОНСТРУКЦИЙ | 1999 |
|
RU2165617C1 |
| УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ ЛИНЕЙНОГО КОЛЕБАТЕЛЬНОГО ДВИЖЕНИЯ ВО ВРАЩАТЕЛЬНОЕ | 1998 |
|
RU2161280C2 |
Изобретение относится к вибрационному транспортирования в различных областях народного хозяйства. Механизм вибрационного перемещения включает транспортируемый объект с инерционным грузом, установленный на немагнитной поверхности, соединенной с источником возмущающих колебательных воздействий, при этом инерционный груз представляет собой поршень, свободно установленный в выполненном в объекте резервуаре, частично заполненном ферромагнитной жидкостью. В нижней части объекта вблизи места его контакта с вибрирующей поверхностью выполнены углубления с установленными в них П - образными постоянными магнитами, соединенные каналами с резервуаром. Уменьшаются энергозатраты на виброперемещение и расширяются функциональные возможности механизма. 1 ил.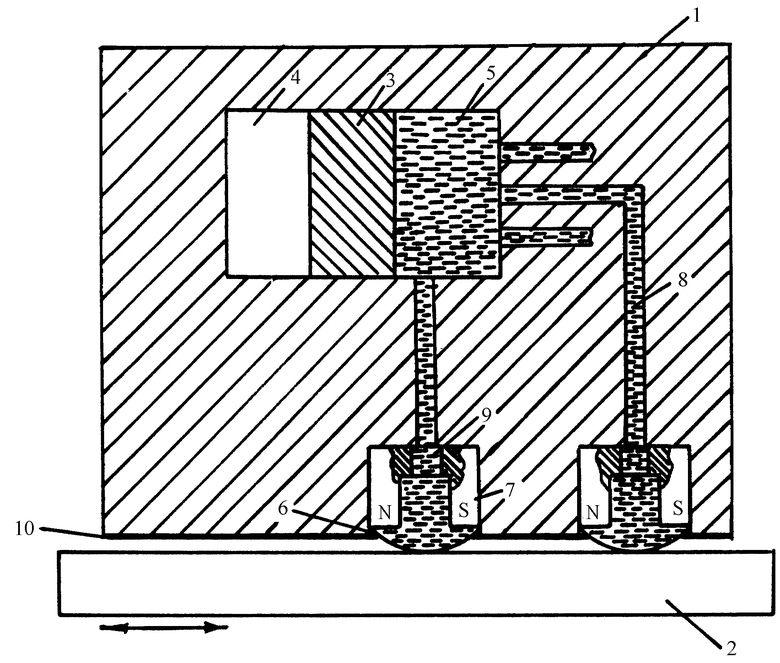
Механизм вибрационного перемещения, включающий транспортируемый объект с инерционным грузом, установленный на немагнитной поверхности, соединенной с источником возмущающих колебательных воздействий, отличающийся тем, что инерционный груз представляет собой поршень, свободно установленный в выполненном в объекте резервуаре, частично заполненном ферромагнитной жидкостью, при этом в нижней части объекта вблизи места его контакта с вибрирующей поверхностью выполнены углубления с установленными в них П-образными постоянными магнитами, соединенные каналами с резервуаром.
| Блехман И.Н, | |||
| Джанелидзе Г.Ю | |||
| Вибрационное перемещение | |||
| - М.: Наука, 1964, с | |||
| ДИФФЕРЕНЦИАЛЬНАЯ ТЕРМИОННАЯ ЛАМПА | 1920 |
|
SU294A1 |
| Вибротранспортирующее устройство | 1978 |
|
SU1033394A1 |
| Вибрационный конвейер | 1980 |
|
SU984955A1 |
| SU 757418 A, 28.08.1980 | |||
| Вибрационный конвейер | 1989 |
|
SU1645216A2 |
