Изобретение относится в основном к следящим системам. Более конкретно, изобретение относится к следящим системам, которые сохраняют данные, указывающие расположение подвижных устройств.
Следящие системы используют радиосвязь для обнаружения местонахождения подвижных устройств. Одним примером такой следящей системы является коммуникационная сеть, которая обеспечивает коммуникационные услуги через посредство подвижных радиоприемников-передатчиков. Радиокоммуникационные сообщения, которые прозрачны для пользователей радио, информируют центральный контроллер о расположении подвижных приемников-передатчиков, пользующихся коммуникационными услугами этой сети.
Данные о месте нахождения исключительно важны для коммуникационной сети. Знание меторасположения подвижного устройства позволяет сети наиболее целесообразно маршрутизировать сообщение через узлы этой сети. Дополнительно, такое знание позволяет сети удовлетворять различным правилам и процедурам, которые могут быть наложены различными политическими организациями, под юрисдикциями которых работает эта сеть. Например, в соответствии с одной юрисдикцией сеть может работать только с первым набором частот, в то время как в соответствии с соседней юрисдикцией сеть может работать только со вторым набором частот. Дополнительно, различные тарифы или налоги могут накладываться на коммуникационные услуги, предоставляемые подвижным устройствам, работающим под различными юрисдикциями.
Чем точнее данные о местоположении, тем лучше. Более точные данные позволяют сети лучше опознавать, когда подвижные устройства переходят из одной юрисдикции в другую юрисдикцию. Однако затраты обычно возрастают пропорционально точности данных о местоположении, и поэтому существует потребность удержать затраты на возможно низком уровне и получать возможно более высокие доходы. Одним видом затрат, которому уделяют наибольшее внимание, является величина коммуникационных ресурсов, которые расходуются на сохранение данных о текущем месторасположении. Чем больше ресурсов потребляется на сохранение данных о текущем месторасположении, тем меньше остается ресурсов на использование абонентами коммуникационных услуг и на получение прибыли. Дополнительно, подвижные устройства часто работают от батарей, и чрезвычайно большое количество коммуникаций влечет исключительно большое потребление наличной батарейной мощности.
Преимущество изобретения состоит в том, что оно обеспечивает усовершенствованную следящую систему.
Другим преимуществом изобретения является то, что следящая система минимизирует объем коммуникаций, необходимых для сохранения нужных данных.
Следующим преимуществом изобретения является то, что следящая система является программируемой, что позволяет ей удовлетворять разнообразным условиям подачи сообщений о местоположении, накладываемых в различных регионах, в которых подвижные устройства могут находиться и работать.
Перечисленные выше и другие преимущества изобретения реализованы способом слежения за подвижным устройством. Подвижное устройство для реализации этого способа должно принимать сообщения, указывающие на границу. Подвижное устройство затем определяет, когда оно выходит за границу. Когда подвижное устройство находится вне границы, оно передает сообщение о текущем местонахождении, описывающее месторасположения.
Перечисленные выше и другие преимущества изобретения реализованы в другой форме способом слежения за подвижным устройством. Этот способ предполагает прием данных об исходном местонахождении от подвижного устройства. Данные об исходном месторасположении описывают исходное месторасположение подвижного устройства. Эти данные об исходном месторасположении сохраняются и информационное сообщение передается на подвижное устройство. Информационное сообщение описывает границу, которая окружает исходное месторасположения.
На фиг. 1 показан регион на поверхности Земли, в пределах которого работает коммуникационная сеть;
на фиг. 2 - блок-схема мобильного устройства, которое держит связь с коммуникационной сетью;
на фиг. 3 - блок-схема шлюза, который выполняет роль узла в сети;
на фиг. 4 - алгоритмическая блок-схема процедуры подачи питания, выполняемой подвижным устройством;
на фиг. 5 - блок-схема, хранящая позиционную таблицу структуры, встроенной в подвижное устройство;
на фиг. 6 - алгоритмическая блок-схема позиционной процедуры, реализуемой подвижным устройством;
на фиг. 7 - блок-схема сообщения о текущем месторасположении, передаваемого подвижным устройством;
на фиг. 8 - блок-схема сообщения о границе, передаваемого шлюзом;
на фиг. 9 - алгоритмическая блок-схема процедуры, реализуемой шлюзом;
на фиг. 10 - блок-схема хранящая абонентную базу данных структуры, встроенной в шлюз;
на фиг. 11 - блок-схема хранящая пограничную базу данных структуры встроенной в шлюз.
Фиг. 1 иллюстрирует один из многих различных регионов поверхности Земли, где работает коммуникационная сеть 10. В предпочтительном варианте осуществления сеть 10 включает в себя искусственные спутники 12, движущиеся по орбитам вокруг Земли. Спутники 12 могут двигаться относительно Земли или быть стационарными (т.е. геосинхронными), или могут быть и теми и другими. Как используется здесь, термины "орбита" или "движение по орбите вокруг Земли" предполагаются включающими все подобные случаи. Коммуникации могут маршрутизироваться через спутники 12 и через шлюзы 14. Шлюзы 14 расположены на Земле в фиксированных точках. Спутники 12 и шлюзы 14 работают как узлы сети 10. Шлюзы 14 соединены с общественной телекоммуникационной сетью (PSTN), что позволяет маршрутизировать коммуникационные сообщения на или от любого терминала, соединенного общественной телекоммуникационной сетью PSTN через сеть 10.
Сеть 10 обеспечивает коммуникационные услуги любому количеству подвижных устройств 16. Как предполагает этот термин, подвижные устройства 16 не приписаны к какому-либо конкретному пункту, но могут перемещаться от одного места к другому. Подвижные устройства 16 включают в себя переносные устройства, которые весьма просто переносятся, а также устройства, которые транспортируются с большими трудностями. Подвижное устройство 16 держит коммуникационную связь с ближайшим спутником 12, который передает коммуникационное сообщение на ближайший шлюз 14.
Подвижные устройства 16 работают в соответствии с одной из многочисленных различных политических юрисдикций 18. Юрисдикции 18 окружены политическими границами 20. Как правило, границы 20 имеют очертания неправильной формы. Сеть 10 должна весьма точно знать, когда подвижное устройство 16 пересекает границу 20, чтобы приводить в соответствие с юрисдикцией 18 распределение частот, выписку счетов, налогообложение и другие параметры. В сети 10 также нужно знать, хотя и с меньшей точностью, где находится подвижное устройство 16, чтобы соединения наилучшим образом были маршрутизированы через спутники 12.
Когда подвижное устройство 16 находится в центре какой-либо юрисдикции 18, как это иллюстрирует подвижное устройство 16a, оно не находится вблизи границы 20. Следовательно, сети 10 достаточно точно иметь сравнительно неточные данные о месторасположении подвижного устройства 16a. Подвижное устройство 16a может передвигаться на сравнительно большое расстояние, прежде чем оно окажется вблизи границы 20. Это большое расстояние обозначено радиусом окружности около подвижного устройства 16a. Эта окружность образует границу 22a.
В противоположность этому, когда подвижное устройство 16 находится вблизи границы 20, как это иллюстрирует подвижное устройство 16b, в сети 10 нужно сравнительно точные данные о месторасположении подвижного устройства 16b. Подвижное устройство 16b может войти в другую юрисдикцию 18, переместившись на сравнительно небольшое расстояние, как иллюстрирует радиус границы 22b.
Как более подробно будет сказано ниже, подвижные устройства 16 сами определяют свои месторасположения. В предпочтительном варианте осуществления изобретения подвижные устройства 16 используют спутниковую позиционную систему 24, подобную глобальной позиционной системе (GPS), для определения своего положения. Система 24 включает в себя созвездие искусственных спутников, находящихся на околоземных орбитах. Спутники системы 24 могут быть такими же или отличными от спутников 12. В типовом варианте осуществления спутники системы 24 отличаются от спутников 12, но это несущественно. Подвижные устройства 16 используют известные способы для сбора и обработки сигналов, передаваемых системой 24, для определения своего собственного положения. Для простоты объяснения, но без ограничения настоящего изобретения, работа системы 24 описана со ссылками на глобальную позиционную локаторную систему (GPS), но для специалистов в данной области техники должно быть ясно, что могут быть использованы другие позиционные локаторные системы.
Следящая система по настоящему изобретению использует подвижные системы 16 и шлюзы 14 сети 10. Спутники 12 работают в качестве узлов для передачи телекоммуникационных данных между подвижным устройством 16 и шлюзом 14. Каждое подвижное устройство 16 определяет свое расположение и посылает коммуникационное сообщение на сеть 10 от ближайшего "локального" шлюза 14, чтобы дать знать сети 10 о своем местонахождении. Когда шлюз 14 примет сообщение о местонахождении, он генерирует данные, которые определяют границу 22, и передает эти граничные данные на подвижное устройство 16. Пока подвижное устройство 16 работает внутри определенной границы 22, у него нет надобности сообщать сети 10 о своем местонахождении. Однако, когда подвижное устройство 16 выходит за границу 22, оно передает на сеть 10 сообщение о своем новом местонахождении и принимает новое определение границы.
Таким образом, следящая система, соответствующая настоящему изобретению, минимизирует число коммуникационных сообщений, которое нужно для обладания действительными данными. Менее точные данные передаются меньшим числом сообщений о местонахождении, когда такие менее точные данные допустимы, как иллюстрируют подвижное устройство 16a и граница 22a. Более точные данные передаются большим числом сообщений о местонахождении, когда необходимы более точные данные, как иллюстрируют подвижное устройство 16b и граница 22b на фиг. 1.
Фиг. 2 представляет блок-схему подвижного устройства 16. Подвижное устройство 16 включает в себя приемник-передатчик 26, который передает и принимает сигналы в формате, совместимом со спутниками 12 и сетью 10 (фиг. 1). Эти сигналы содержат информационное сообщение, которое позволяет подвижному устройству 16 иметь коммуникационную связь с ближайшим спутником 12. Через этот спутник 12 подвижное устройство 16 может также иметь коммуникационную связь с любым узлом сети 10, подобным ближайшему шлюзу 14 (фиг. 1). Позиционный локаторный приемник 28 подвижного устройства 16, каким может быть приемник глобальной позиционной системы, принимает сигналы, передаваемые позиционной системой 24 (фиг. 1), и генерирует данные, описывающие текущее местоположение подвижного устройства 16. Передатчик-приемник 26 и приемник 28 соединены с процессором 30. Процессор 30 также соединен с входной-выходной секцией 32, таймером 34 и памятью 36. Входная-выходная секция 32 используется для сборов входов пользователя, подобных срабатываниям силовых переключателей, и хранит набор телефонных номеров для выполнения соединения. Процессор 30 использует таймер 34 для введения счета дням и времени суток. Память 36 содержит данные, которыми являются инструкции для процессора 30 и которые, когда исполняются процессором 30, заставляют подвижное устройство 16 выполнять процедуры, которые описаны ниже. Дополнительно память 36 содержит переменные таблицы и базы данных, которые используются при работе подвижного устройства 16.
Фиг. 3 представляет блок-схему шлюза 14. Шлюз 14 содержит приемник-передатчик 28, который передает и принимает сигналы в формате, совместимом со спутниками 12 (фиг. 1). Эти сигналы содержат информационные сообщения, которые позволяют шлюзу 14 иметь коммуникационную связь с ближайшим спутников 12 и любым числом подвижных устройств 16. Приемник-передатчик 28 соединен с процессором 40. Процессор 40 дополнительно соединен с входной-выходной секцией 42, таймером 44, памятью 46 и интерфейсом позиционной телекоммуникационной сети 48. Входная-выходная секция 42 принимает входные сигналы от пультов, клавиатур и других входных устройств и выдает данные на дисплейные терминалы, принтеры и другие выходные устройства. Процессор 40 использует таймер 44 для введения счета сутками и времени суток. Память 46 содержит полупроводниковые, магнитные и другие запоминающие устройства для хранения данных, которые используются в качестве инструкций процессором 40 и которые, когда выполняются процессором 40, вынуждают шлюз 14 выполнять процедуры, которые описаны ниже. Дополнительно память 46 содержит переменные таблицы и базы данных, которые используются в работе шлюза 14. Через спутник 48 шлюз 14 может сообщаться с позиционной телекоммуникационной сетью.
Фиг. 4 представляет алгоритмическую блок-схему процедуры подачи питания 50, исполняемой подвижными устройствами 16 в соответствии с изобретением. Процедура 50 выполняется всякий раз, когда на подвижное устройство 16 подается питание. Задача 52 выполняет инициализацию внутри подвижного устройства 16. Для специалистов в данной области техники должно быть понятно, что в ходе инициализации многочисленные ячейки памяти могут быть заполнены предопределенными значениями. Как видно на фиг. 5, позиционная таблица 54 является запоминающей структурой, которую подвижное устройство 16 хранит в памяти 36 (фиг. 2). Таблица 54 содержит элементы данных, которые будут описаны ниже.
На фиг. 4 задача 52 настраивает по крайней мере один из этих элементов данных на предопределенное значение. Предопределенное значение выбирается так, чтобы позиционная процедура, которая описана ниже со ссылками на фиг. 6, решила, что необходимо передать сообщение о местонахождении на шлюз 14 как только оценит инициализированный элемент данных. Поэтому задача 52 заставляет подвижное устройство 16 передавать сообщение о местонахождении на шлюз 14 в ответ на подачу энергии на подвижное устройство 16.
После завершения задачи 52 задача 56 синхронизирует приемник-передатчик 26 для связи с ближайшим спутником 12. После выполнения задачи 56 подвижное устройство 16 может обмениваться данными с сетью 10. При выполнении задачи 58 подвижное устройство 16 регистрируется сетью 10. Этап регистрация осуществляется путем передачи идентификационных данных на обслуживающий шлюз 14 и выполнением всех процедур подтверждения подлинности, диктуемых сетью 10. Обслуживающий шлюз 14 первоначально определяется ближайшим спутником 12 при выполнении процесса, который прозрачен как для подвижного устройства 16, так и обслуживающего шлюза 14. После регистрации подвижное устройство оказывается готовым к приему или передаче вызовов. Когда подвижное устройство 16 ожидает поступление вызова или ввод пользователем исходящего вызова, оно работает в резервном режиме 60. Из режима резервирования 60 оно может выйти на режим обработки вызова, когда приходит вызов, а затем вернуться (в резервный режим). Когда подвижное устройство 16 отсоединяется от питания, оно входит в режим отключенности 64. Подвижное устройство 16 выходит из режима отключенности 64 и вновь выполняет процедуру подачи питания 50, когда на него подается питание.
Фиг. 6 представляет алгоритмическую диаграмму позиционирующей процедуры 66. Подвижное устройство 16 многократно воспроизводит процедуру 66 с определенной частотой, когда работает либо в резервном режиме 60, либо в режиме обработки вызова 62 (фиг. 4). В предпочтительном варианте осуществления эта частота может изменяться от одного раза за несколько секунд до одного раза за несколько минут или часов.
В ходе процедуры 66 подвижное устройство выполняет справочную задачу 68, чтобы определить, имеется ли в наличии сигнал от позиционирующей системы 24 (фиг. 1) для использования с целью определения местонахождения. При нормальной работе система 24 доступна, и поэтому можно пользоваться предпочтительным способом определения местонахождения. Таким образом, когда система 24 доступна, подвижное устройство 16 выполняет задачу 70, использующую позиционный локаторный приемник 28 (фиг. 2) для приема сигналов от системы 24. Задача 70 обрабатывает сигналы известным способом для получения набора параметров, которые описывают текущее местонахождения.
С другой стороны, чтобы предотвратить полную зависимость сети 10 от системы 24, изобретение предусматривает использование вспомогательного способа определения текущего местонахождения. Поэтому, когда система 24 оказывается недоступной, задача 72 выполняется с целью определения текущего местонахождения по сигналам, передаваемым спутником 12 сети 10. В предпочтительных вариантах осуществления спутники движутся по своим орбитам относительно земли со скоростью около 25000 км/ч. Из-за этого спутниковые сигналы испытывают значительный доплеровский сдвиг, и этот доплеровский сдвиг изменяется, когда спутник проходит зенит. Дополнительно спутники 12 передают ячеистые локаторные данные. Поэтому задача 72 следит за диапазоном и скоростью изменения диапазона для формирования доплеровской сигнатуры, которая, будучи скомбинирована с ячеистыми локаторными данными, в какой-то мере определяет местонахождение подвижного устройства 16. Вспомогательный способ, выполняемый в ходе задачи 72, может оказаться более медлительным и менее точным, чем способ определения местонахождения, реализуемый задачей 70. Однако такие побочные данные о местонахождении предпочтительней полного отсутствия данных о местонахождении.
После определения текущего местонахождения подвижного устройства 16 задачей 70 или 72, задача 74 запоминает данные о текущем местонахождении и оценивает текущее местонахождение относительно текущей границы 22a-22b (фиг. 1), установленной для этого подвижного устройства 16. На фиг. 5 позиционная таблица 54 содержит элементы данных 76 и 77, которые используются для запоминания данных о текущем местонахождении и пограничных данных, соответственно.
Если используется задача 70 для определения текущего местонахождения, то предпочтительно, чтобы данные о текущем местонахождении представляли собой значение широты и значение долготы. Как используются здесь, термины: "широта" и "долгота" предполагаются включающими другие способы отсчета и измерения, способные указывать позицию. В одном варианте осуществления настоящего изобретения данные о границе представляют собой минимальные и максимальные значения широты и долготы. Поэтому удобно представлять себе границу 22, имеющей квадратную или прямоугольную форму. Задача 74 сравнивает текущее местонахождение с границей 22, чтобы установить, когда текущее местонахождение оказывается за границей 22.
В другом варианте осуществления настоящего изобретения данные о границе представляют собой расстояние, которое интерпретируется как радиус. Элемент данных 79 позиционной таблицы 54 (фиг. 5) содержит широту и долготу исходного местонахождения. Задача 74 определяет, не находится ли текущее местонахождение от исходного местонахождения на расстоянии большем, чем этот радиус. В этом варианте осуществления граница 22 образует окружность, что иллюстрирует фиг.1, имеющая центр в исходном местонахождении и радиус которой определяется данными о границе. Задача так же определяет, не вышло ли подвижное устройство 16 за границу 22. Специалисты в данной области техники могут понять, что данные о границе не ограничиваются описанием прямоугольника, квадрата или окружности, не могут описывать любую форму, соответствующую форме политической юрисдикции 18.
После завершения задачи 74 опрашивающаяся задача 78 передает программное управление задаче 79, если текущее местонахождение подвижного устройства 16 оказывается за границей 22. Задача 79 передает сообщение о текущем местонахождении 80 на сеть 10.
Фиг. 7 представляет блок-схему предпочтительного формата сообщения 80. В частности, сообщение 80 имеет заголовок 82, информирующий сеть 10 о том, что это сообщение несет данные о местонахождении, идентификатор 84, информирующий сеть 10, какое подвижное устройство 16 передало это сообщение, и данные о текущем местонахождении 86, которые описывают текущее местонахождение подвижного устройства 16 либо значениями широты-долготы, либо другими параметрами.
На фиг. 6 процедура 66 после выполнения задачи 79 находится в ожидании пока задача 88 не примет ответное сообщение 90 от сети 10.
Фиг. 8 представляет блок-схему предпочтительного формата сообщения 90. В частности, сообщение 90 содержит подтверждающий блок 92, который информирует подвижное устройство 16 о том, что сеть 10 приняла предыдущее сообщение о текущем местонахождении 80 (фиг. 7). Дополнительно сообщение 90 содержит данные о границе 94, которые описывают границу 22 (фиг. 1). Данные о границе 94 могут быть сконфигурированы так, что результирующая граница 22 окружит текущее местонахождение, определяемое данными о текущем местонахождении 86 сообщения 80 (фиг. 7).
После приема сообщения 90 задача 96 (фиг. 6) запоминает данные о границе 94 (фиг. 8) в позиционной таблице 54 в элементе данных 77 (фиг. 5). Дополнительно задача 96 обновляет элемент данных с временной меткой 98 позиционной таблицы 54, чтобы отметить текущую дату и время, и обновляет элемент данных с исходным местонахождением 79 позиционной таблицы 54 (фиг. 5) для указания текущего местонахождения. После выполнения задачи 96 программное управление передается из процедуры 66. Процедура 66 выполняется повторно в соответствии с заданной частотой.
Вернемся к задаче 78; выполняется совершенно другой процесс, если текущее местонахождение подвижного устройства 16 не оказалось за границей 22. В частности, процедура 66 проверяет другие условия, которые могут обусловить передачу сообщения о текущем местонахождении на сеть 10. Вообще говоря, такие другие условия являются вспомогательными, которые возникают весьма редко при нормальной работе. Поэтому очень незначительный объем коммуникационных ресурсов потребляется обработкой сообщений о местонахождении, порождаемых этими условиями.
В частности, в предпочтительном варианте осуществления опрашивающая задача 100 определяет, не отстоит ли подвижное устройство 16 в текущий момент от исходного местонахождения дальше, чем предпочтительное расстояние, указанное в элементе данных 79 (фиг. 5). Предпочтительно, чтобы это предопределенное расстояние задавалось настолько большим, что отсутствовала вероятность для подвижного устройства 16 превысить его, если не возникнут какие-либо проблемы с определением границы 22. Если это предопределенное расстояние будет превышено, то задачи 79, 88 и 96 выполняются для обновления сети 10 и получения нового определения границы 22.
Если предопределенное расстояние не превышается, то задача 102 сравнивает временную метку, записанную в элементе данных 98 (фиг. 5), с текущей датой и временем суток, чтобы установить, не истекла ли предопределенная длительность. Предпочтительно, чтобы эта длительность была задана таким большим числом, подобным одному месяцу, чтобы сравнительно стационарные подвижные устройства 16 не потребляли значительного объема коммуникационных ресурсов на сообщения о собственном местонахождении сети 10. Если эта предопределенная длительность не превышена, задача 104 заставляет программное управление покинуть процедуру 66. С другой стороны, если предопределенная длительность окажется превзойденной, задача 104 передает программное управление задачам 79, 88 и 96 для обновления сети 10.
Вернемся к задаче 52 (фиг. 4), инициализация позиционной таблицы 54 (фиг. 5) может настроить временную метку в элементе данных 98 на предопределенную величину, которая указывает на дату в прошлом. Таким образом, в первый раз процедура 66 выполняется после подачи питания, задача 104 затем обнаружит большую длительность, будет послано сообщение о текущем местонахождении на сеть 10, будут обновлены исходное местонахождение и временная метка, и данные о новой границе будут приняты от сети 10.
Хотя предпочтительно, чтобы процедура 66 исполнялась с постоянной частотой, подвижное устройство может принимать сообщения о текущем местонахождении от сети 10 в любое время, что иллюстрирует узел 106. Сообщение о текущем местонахождении инструктирует подвижное устройство 16 ответить передачей данных, указывающих его местонахождение. После приема этой инструкции выполняются задачи 79, 88 и 96, будет или не будет активна процедура 66. Как сказано выше, при выполнении задач 79, 88 и 96 подвижное устройство 16 передает сообщение о текущем местонахождении и ожидает в ответ данные о границе.
Желательно, чтобы шлюзы 14 выполняли функцию слежения для сети 10, но эта функция слежения может исполняться где-то в другом месте сети 10. Каждый шлюз 14 выполняет эту функцию для тех подвижных устройств 16, которые зарегистрированы. В предпочтительном варианте осуществления каждое подвижное устройство 16 имеет собственный шлюз 14, но может перемещаться по площади, обслуживаемой любым другим шлюзом 14. Обслуживающий и собственный шлюзы могут сообщаться друг с другом через сеть 10 или сеть передачи данных общего назначения (PSTN) при необходимости обмена информацией об абонентских подвижных устройствах 16.
Фиг. 6 представляет алгоритмическую блок-схему процедуры, выполняемой обслуживающими шлюзами 14 при обработке данных о местонахождении для зарегистрированных ими подвижных устройств 16. Шлюз 14 может получить сообщение о текущем местонахождении 80 (фиг. 7) от любого зарегистрированного подвижного устройства 16 в любой момент, как иллюстрирует узел 108. Когда сообщение 80 принято, задача 110 извлекает данные о текущем местонахождении 86 (фиг. 7) из сообщения 80.
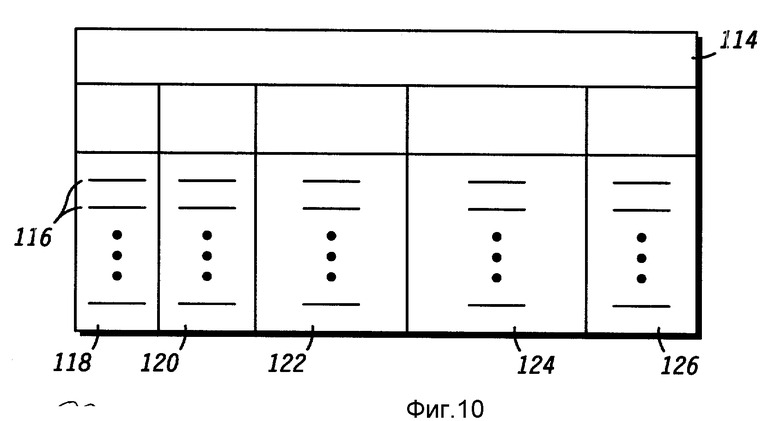
Задача 112 запоминает данные о текущем местонахождении 86, а абонентской базе данных 114, находящейся в пределах памяти 46 (фиг. 3).
Фиг. 10 представляет блок-схему базы данных 114. База данных 114 содержит запись 116 для каждого зарегистрированного подвижного устройства 16. В каждой записи 116 имеется поле данных 118 для идентификатора подвижного устройства, поле данных 120 для телефонного номера подвижного устройства, поле данных 122 для исходного местонахождения подвижного устройства, поле данных 124 для временной метки, ассоциированной с исходным местонахождением, и другие элементы данных 126. Другие элементы данных 126 описывают собственный или обслуживающие шлюзы, инструкции по расчетам, идентификаторы уровня обслуживания и другие данные, необходимые для работы сети 10.
Как видно на фиг. 9 и 10, поле данных исходного местонахождения 122 указывает последнее известное местонахождение ассоциированного подвижного устройства 16. Именно в поле данных 122 запоминаются данные о текущем местонахождении 86. Другими словами, текущее местонахождение оказывается исходным местонахождением. Задача 128 запоминает текущую календарную дату и время суток в поле данных временной метки 124.
Далее задача 130 использует текущее/исходное местонахождение, которое получено последним от подвижного устройства 16 для генерирования данных о границе. В предпочтительном варианте осуществления задача 130 использует базу данных границы 132 для формирования данных о границе.
Фиг. 11 представляет блок-схему структуры базы данных границы 132, хранящуюся в памяти 46 (фиг. 3). Пограничная структура данных 132 содержит записи 134, которые описывают секции региона, обслуживаемого шлюзом 14. Каждая секция характеризуется минимальной широтой 136, максимальной широтой 138, минимальной долготой 140 и максимальной долготой 142. База данных 132 содержит столько записей 134, сколько требуется для описания региона, обслуживаемого шлюзом 14. Этот регион может соответствовать, но не обязательно, территории действия одной или более юрисдикций 18 (фиг. 1). Каждая запись содержит данные о границе 144. Данные о границе 144 описывают границу 22 (фиг. 1), которая ассоциируется с любым подвижным устройством 16, находящимся внутри секции, определяемой заданными широтами и долготами 136 - 142. Как сказано выше, данные о границе 144 могут содержать расстояние, используемое как радиус. Альтернативно данные о границе 144 могут содержать значения широты и долготы. Если так, то значение широты и долготы 136 - 142 считаются данными о границе 144.
Как представляют фиг. 9 и 11, задача 130 выполняет операцию просмотра таблицы, чтобы найти запись 134 в базе данных 132, которая указана в данных о местонахождении, полученных последними от подвижного устройства 16. В предпочтительном варианте осуществления задача 130 просто считывает подходящие данные о границе из элемента данных 144 базы данных 132. Эти данные о границе сконфигурированы так, чтобы определялась граница 22, которая охватывает местонахождение, указанное в данных о местонахождении. Если данные о местонахождении, например, имеют форму доплеровских параметров и спутниковых параметров, то задача 130 преобразует эти параметры в значения широты и долготы перед выполнением просмотра базы данных 132.
После получения задачей 130 данных о границе задача 146 передает данные о границе, отвечая на сообщение 90 (фиг. 8), на подвижное устройство 16. После завершения задачи 146 заканчивается обработка шлюзом 14 и сетью 10 сообщения о текущем местонахождении, принятого узлом 108.
Шлюз 14 может также выполнять эксплуатационную процедуру 148, гарантирующую, что исходные местонахождения (хранящиеся в нем, - перев.) будут в значительной степени соответствовать текущим. Как иллюстрирует задача 150, предпочтительно, чтобы процедура 148 выполнялась вне пиковых часов траффика. Другими словами, если коммуникационный траффик в сети 10 через шлюз 14 близок к пиковой пропускной способности, то выполнение процедуры 148 откладывается. Поэтому соединения, выполняемые процедурой 148, не потребляют коммуникационные ресурсы, которые могут потребоваться абонентам.
При выполнении задачи 152 отыскиваются временные метки 124 записей 116 в абонентской базе данных 114 (фиг. 10) для зарегистрированных последними абонентов, имеющих устаревшие данные об исходном местонахождении. Задача 152 может искать любую запись 116, временная метка которой 124 равна по крайней мере предопределенной длительности относительно текущего времени. После обнаружения устаревшей записи задача 154 передает инструкцию о текущем местонахождении на означенное подвижное устройство 16 и ожидает ответ от этого подвижного устройства. После приема ответа задачи 110, 112, 128, 130, 146 выполняются, как описано выше, для обновления элементов данных об исходном местонахождении и временной метке 122 и 124 и передают данные о новой границе на подвижное устройство 16. После выполнения задачи 16 эксплуатационная процедура 148 может быть воспроизведена применительно к другой устаревшей абонентской записи 116.
Изобретение обеспечивает создание следящей системы, которая минимизирует объем коммуникаций, необходимый для сохранения действительных (достоверных) данных о местонахождении. Подвижные устройства динамически программируются данными о границе, и данные о границе индивидуально отвечают местонахождениям подвижных устройств. Поэтому настоящее изобретение способно удовлетворять разнообразные потребности в информации о местонахождении, свойственные разнообразным регионам, в пределах которых работают подвижные устройства.
Изобретение было описано со ссылками на предпочтительный вариант осуществления. Однако для специалистов в данной области техники должно быть понятно, что этот предпочтительный вариант может быть подвергнут многочисленным изменениям и модификациям без отклонения от существа изобретения. Например, хотя предпочтительный вариант осуществления был описан с применением терминов, относящихся к спутниковой позиционирующей системе передачи данных общего назначения GPS, которая используется для передачи сигналов о местонахождении на подвижные устройства 16, можно использовать другие системы или способы. Как используется здесь, слова "определение местонахождения" предполагаются включающими другие устройства и способы определения местонахождения, известные специалистам в данной области техники, будь они размещены на спутниках или на земле.
OPAN дает пример наземной позиционирующей системы, доступной в настоящее время во многих частях земли. Известны другие устройства и способы определения местонахождения. Поэтому эти и другие изменения и модификации, которые очевидны для специалистов, предполагаются включенными в объем настоящего изобретения.
На фиг. 1 обозначено: 1 - спутниковая позиционирующая система, 2 - шлюз.
На фиг. 2: 1 - позиционный локаторный приемник, 2 - коммуникационный световой приемник-передатчик, 3 - процессор, 4 - вход-выход, 5 - таймер, 6 - память.
На фиг. 3: 1 - коммуникационный сетевой приемник-передатчик, 2 - процессор, 3 - вход-выход, 4 - таймер, 5 - интерфейс сети передачи данных общего назначения, 6 - память.
На фиг. 4: 1 - подача питания, 2 - инициализация (позиционной таблицы), 3 - синхронизировать, 4 - регистрация коммуникационной сетью, 5 - резервный режим, 6 - обработка вызова (соединения), 7 - отключение питания.
На фиг. 5: 1 - позиционная таблица, 2 - исходное местонахождение, 3 - временная метка для исходного местонахождения, 4 - текущее местонахождение, 5 - данные о границе.
На фиг. 6: 1 - позиционирующая процедура, 2 - имеется ли позиционный сигнал, 3 - да, 4 - нет, 5 - слежение за позиционирующими сигналами для определения текущего местонахождения, 6 - слежение за сигналами спутников коммуникационной сети, 7 - запоминание текущего местонахождения и сравнение его с границей, 8 - за границей, 9 - текущее местонахождение превышает предопределенное расстояние, 10 - сравнить текущее время с временной меткой, 11 - оно вышло за предопределенную длительность?, 12 - запомнить данные о границе, обновить временную метку, обновить исходное местонахождения, 13 - выход, 14 - принять ответное сообщение, 15 - передать сообщение о текущем местонахождении, 16 - принять инструкцию о текущем местонахождении.
На фиг. 7: 1 - заголовок, 2 - идентификатор, 3 - текущее местонахождение.
На фиг. 8: 1 - подтверждение, 2 - данные о границе.
На фиг. 10: 1 - абонентская база данных, 2 - идентификатор, 3 - телефонный номер, 4 - исходное местонахождение, 5 - временная метка для местонахождения, 6 - другие данные.
На фиг. 11: 1 - пограничная база данных, 2 - минимальная широта, 3 - максимальная, 4 - минимальная долгота, 5 - максимальная долгота, 6 - данные о границе.
На фиг. 9: 1 - обслуживание, 2 - вне часов пикового трафика?, 3 - нет, 4 - выход, 5 - да, 6 - поиск устаревшей записи в абонентской базе данных, 7 - передать инструкцию о текущем местонахождении; ожидать ответ, 8 - извлечь текущее местонахождение из сообщения, 9 - запомнить текущее местонахождение в качестве исходного местонахождения, 10 - запомнить временную метку, 11 - сформировать данные о границу, 12 - передать ответное сообщение о данных о границе, 13 - принять сообщение от текущем местонахождении.









Использование: в следящих системах. Коммуникационная сеть, которая отслеживает местонахождения подвижных объектов, пользующихся этой сетью. При подаче электропитания подвижные объекты определяют свое текущее местонахождение по сигналам, передаваемым, к примеру, спутниками, висящими над ними. Затем они направляют в сеть информационные связные сообщения, описывающие их местонахождение. Сеть запоминает эти местонахождения и возвращает информационные сообщения, которые описывают границы, окружающие местонахождения подвижных объектов. При этом подвижные объекты периодически определяют текущее местонахождение по регулярному расписанию. Если текущее местонахождение объектов оказывается за пределами заранее предписанных границ, то они направляют в сеть другие информационные сообщения о местонахождении, обновляя данные о местонахождении, сохраняемые в сети, и, принимая задание новой границы, что является техническим результатом. 5 с. и 23 з. п. ф-лы, 11 ил.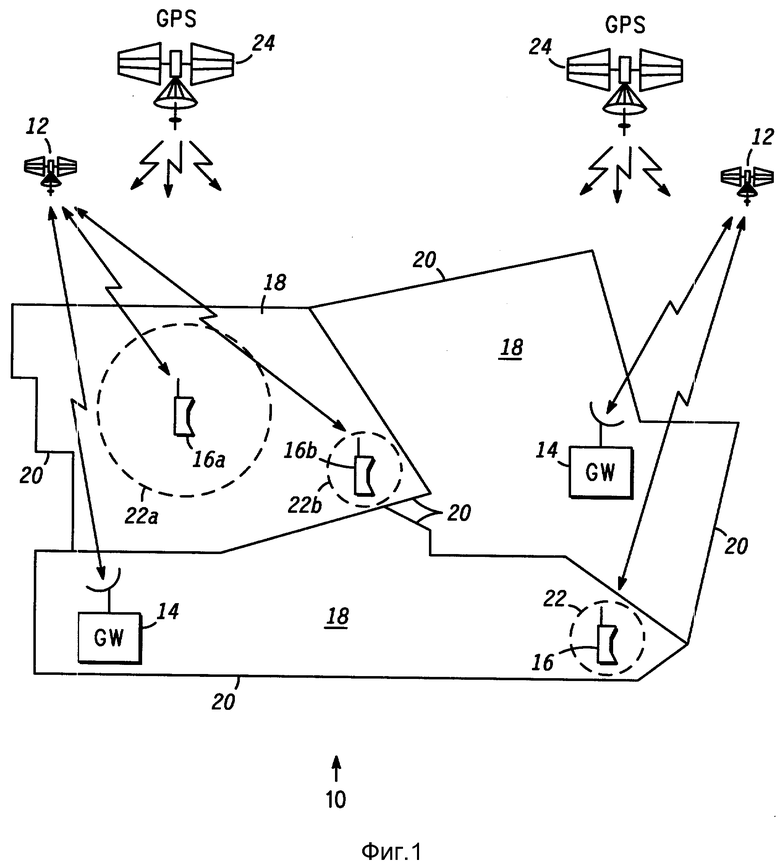
| EP, патент, 0210396, кл | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |

