Изобретение относится к области радиотехники и может найти применение в устройствах анализа помеховой обстановки для систем защиты от помех.
Основные способы частотной адаптации заключаются в зондировании выделенных для радиосвязи частот тестовыми последовательностями с оценкой вероятности ошибок на каждой частоте и последующим выбором для радиосвязи частот с минимальной вероятностью ошибок. Такие способы описаны (например, патент США N 4328581, авт. св. СССР N 1667265, 1107304, 1188897). Наиболее полно общий подход к решению задачи частотной адаптации описан (Комарович В.Ф. и Сосунов В. Н. Случайные радиопомехи и надежность КВ связи. -М.: Связь, 1977, с. 92-127).
Однако все эти способы не дают ответа на вопрос о природе действующих помех и весьма приближенно характеризуют степень пригодности канала в условиях группирования ошибок.
Наиболее близким к предлагаемому является способ (Шувалов В.П. Прием сигналов с оценкой их качества. -М.: Связь, 1979, с. 168).
Этот способ заключается в том, что
передают известную испытательную последовательность (тест);
сравнивают на приемном конце принятый тест с эталонной последовательностью;
считают количество ошибок (несовпадений);
повторяют эту процедуру на выделенных для радиосвязи частотах;
запоминают результаты определения Кош в соответствии с номерами частот.
При этом
 - оценка вероятности ошибок;
- оценка вероятности ошибок;
Yi = I при наличии ошибок;
Yi = 0 правильный прием.
Такая оценка является состоятельной, несмещенной и обладает дисперсией
Достоинством оценки  , получаемой таким способом, является то, что в ней отражено влияние на передаваемый сигнал всех видов помех.
, получаемой таким способом, является то, что в ней отражено влияние на передаваемый сигнал всех видов помех.
Для реализации этого способа может быть использовано устройство, представленное на фиг. 1, где обозначено: 1 - датчик теста; 2 - устройство преобразования сигнала; 3 - канал связи; 4 - устройство преобразования сигнала приемника; 5 - устройство выделения ошибок; 6 - счетное устройство; 7 - датчик теста; 8 - запоминающее устройство.
Датчик теста 1 вырабатывает зондирующую тестовую последовательность, которая поступает в канал связи 3 через устройство преобразования сигнала 2 (модулятор). На выходе канала связи 3 сигнал демодулируется в блоке 4, а затем сравнивается в устройстве выделения ошибок 5 с эталонным тестом, вырабатываемым датчиком теста 7. Счетное устройство 6 регистрирует количество ошибок (несовпадений), а в запоминающем устройстве 8 фиксируются номера частот и соответствующие им величины коэффициента ошибок. Для связи используются частоты с минимальным Кош.

где nош - число ошибочных элементов;
nпер - число переданных элементов (длина теста).
Недостатком такого способа является отсутствие информации о природе помех, отсутствие информации о группировании ошибок при передаче теста по нескольким выделенным для связи частотам.
Предлагаемый способ должен решить проблему обнаружения преднамеренной, прицельной по частоте помехи и временной адаптации к ней с целью ее устранения.
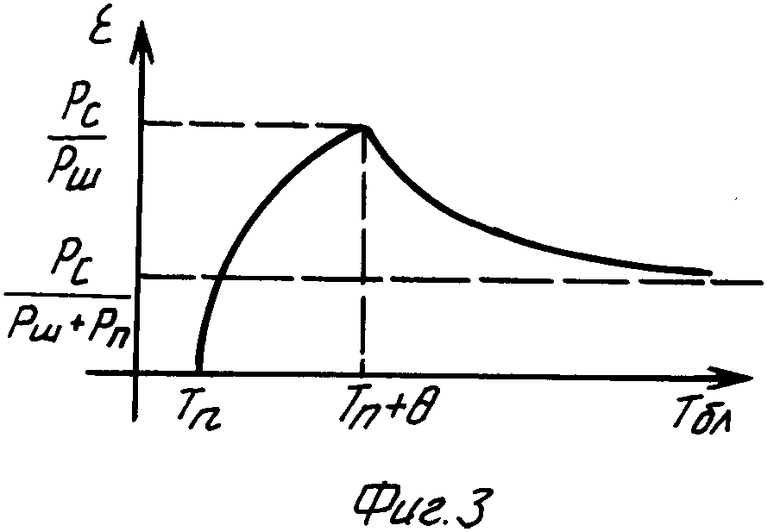
Способ основан на предположении, что реальному постановщику прицельной по частоте помехи требуется некоторое время θ для обнаружения сигнала. Возможные ситуации представлены на фиг. 2,
где θ - время обнаружения канала связи анализатором постановщика помех;
Tn - время перестройки на другую частоту;
Tбл - время передачи/приема в канале связи плюс Tn.
В этом случае состояние системы описывается системой уравнений
Pс - мощность сигнала;
Pш - мощность случайного шума;
Pп - мощность помехи.
Значение ε физически представляет собой отношение энергии полезного сигнала расходуемого на передачу сообщения к той части энергии постановщика помех, которая расходуется на подавление сигнала. Исследования производных ε1 (Tбл) и ε2 (Tбл) показывает, что функция ε1 (Tбл) возрастает и выгнута вверх на интервале [0, θ + Tn], а ε2 (Tбл) выгнута вниз. Определение значение функции ε (Tбл), при котором она не имеет точек разыва 1-го рода, получим Tбл = Tn+ θ. Графически результаты приведенных выше размышлений представлены на фиг. 3. Этот график подтверждает элементарный вывод о том, что когда время присутствия на частоте связи равно времени разведки сигнала постановщика помех, подавления нет. На этом эффекте основан предлагаемый способ временной адаптации к прицельный по частоте помехе.
Предлагаемый способ заключается в следующем:
передают известную испытательную последовательность (тест);
сравнивают на приемном конце принятый тест с эталонной последовательностью;
считают количество ошибок (несовпадений);
анализируют группирование (расположение) ошибок на длине теста;
повторяют эту процедуру на выделенных для радиосвязи частотах;
запоминают Кош в соответствии с номерами частот;
анализируют повторяемость расположения ошибок на длине теста при зондировании разных частот,
анализируют общую закономерность группирования ошибок;
делают вывод о наличии прицельный по частоте помехи и о рекомендуемой длительности пакета информации передаваемого на одной частоте, равного длине непораженной части пакета в случае, если ошибки группируются к концу пакета зондирующей последовательности при анализе разных частот.
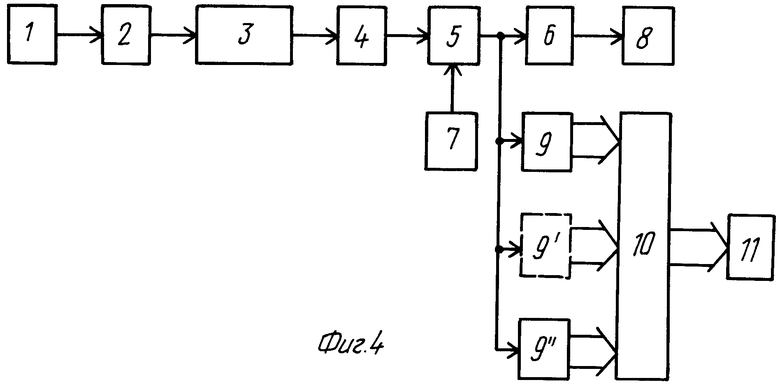
Для реализации предлагаемого способа используется устройство, представленное на фиг. 4, где обозначено: 1, 7 - датчики теста; 2, 4 - устройства преобразования сигнала; 3 - канал связи; 5 - устройство выделения ошибок; 6 - счетное устройство; 8 - запоминающее устройство; 9 - устройство анализа группирования ошибок; 10 - устройство анализа общей закономерности распределения ошибок; 11 - микроЭВМ.
Устройство содержит последовательно соединенные датчик теста 1, устройство преобразования сигнала (модулятор) 2, канал связи 3, устройство преобразования сигнала приемника (демодулятор) 4, устройство выделения ошибок 5, второй вход которого соединен с выходом датчика теста 7, счетное устройство 6, запоминающее устройство 8.
Выход устройства выделения ошибок 5 соединен также со входами устройств анализа группирования ошибок 9, выходы которых соединены с входами устройства анализа общей закономерности распределения ошибок 10, выход которого соединен со входом микроЭВМ 11.
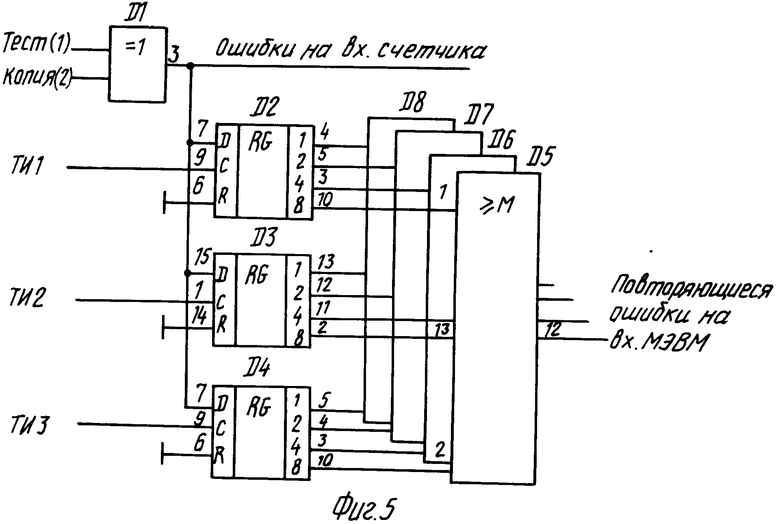
Датчик теста 1 вырабатывает зондирующий тест, который через устройство преобразования сигнала 2 поступает в канал связи 3. Из канала связи 3 через устройство преобразования сигнала приемника 4 сигнал поступает в устройство обнаружения ошибок 5, где поэлементно сравнивается с эталонным тестом от датчика 7. Сигнал ошибки (несовпадения) фиксируется счетным устройством 6, результаты определения коэффициентов ошибок запоминаются в запоминающем устройстве 8 в соответствии с номерами частот. Одновременно с подсчетом числа несовпадений в устройстве анализа 9 накапливают информацию о группировании ошибок в соответствии с номером анализируемой частоты. Затем анализируют общую закономерность распределения ошибок блоком 10, а микроЭВМ 11 делает вывод о наличии прицельной помехи в случае выявления закономерности группирования ошибок к концу пакета и о рекомендуемой длительности пакета. Вариант выполнения блоков 5, 9, 10 для обработки 3-х тестов длиной 4 бита представлен на фиг. 5.
В качестве устройства выделения ошибок 5 используется микросхема 564ЛП2, в качестве устройств анализа группирования ошибок 9 (регистров ошибок) D2, D3, D4 используются регистры 564ИР2, в качестве устройства анализа общей закономерности ошибок 10 (D5-D8) используется мажоритарный элемент 564ЛП13.
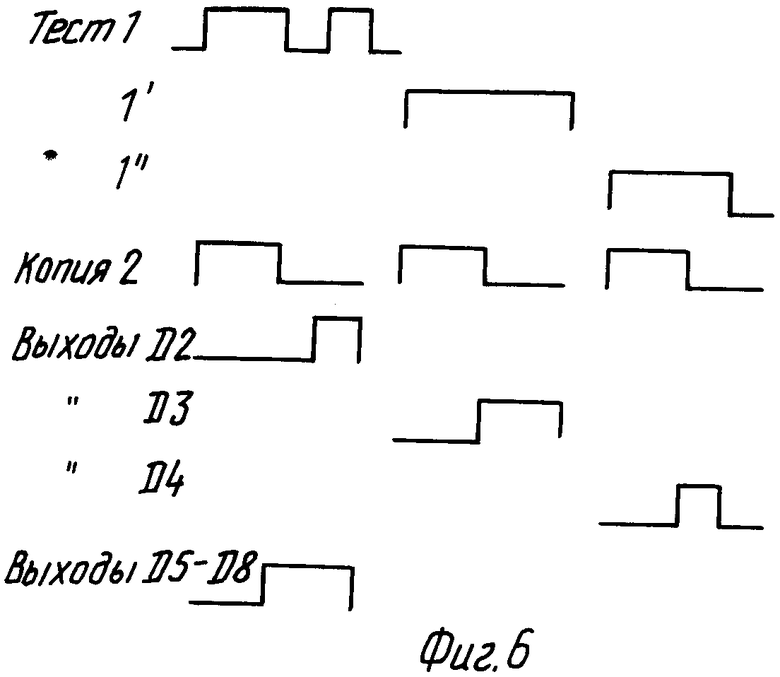
Работа устройства поясняется эпюрами, представленными на фиг. 6.
Применяемые в системах связи режимы программной перестройки рабочей частоты (ППРЧ) с различными длинами пакетов (различным временем передачи/приема на одной частоте) хорошо зарекомендовали себя в условиях преднамеренных помех, так как разведзащищенность такой системы гораздо выше обычных систем связи.
Изобретение относится к области радиотехники и может найти применение в устройствах анализа помеховой обстановки для систем защиты от помех. Предлагаемый способ решает проблему обнаружения преднамеренной, прицельной по частоте помехи и временной адаптации к ней с целью ее устранения. Вырабатываемый датчиком теста 1 сигнал преобразуется и передается по каналу связи 3. Вновь преобразованный в блоке 4 сигнал поступает в устройство выделения ошибок 5, где сравнивается с эталонным тестом, поступающим с датчика 7. Сигнал ошибки фиксируется счетным устройством 6, а результаты определения коэффициентов ошибок запоминаются в запоминающем устройстве 8. Одновременно с подсчетом ошибок в устройствах анализа группирования ошибок 9 накапливают информацию о группировании ошибок в соответствии с номером анализируемой частоты. Затем анализируют общую закономерность распределения ошибок блоком 10 и микроЭВМ 11 делает вывод о наличии прицельной помехи в случае выявления закономерности группирования ошибок к концу пакета и о рекомендуемой длительности пакета. 2 с.п.ф-лы, 6 ил.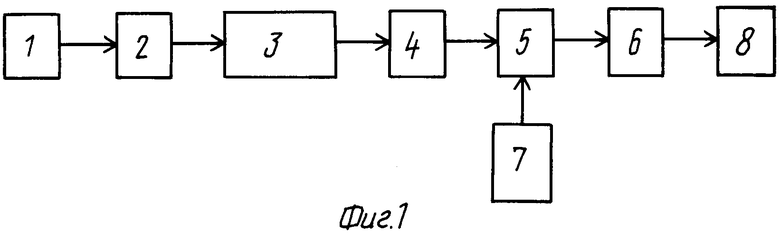
| US, патент, 4328581, кл | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Комарович В.Ф., Сосунов В.Н | |||
| Случайные радиопомехи и надежность КВ связи | |||
| - М.: Связь, 1979, с.92 - 127 | |||
| Шувалов В.П | |||
| Прием сигналов с оценкой их качества | |||
| - М.: Связь, 1979, с.168. | |||

