Изобретение относится к системам для установления цифровых соединений сетей связи и более конкретно для установления таких соединений с использованием широкополосных сетей и коммутационных систем.
Создание большого числа служб телефонной связи, таких, как служба междугородной связи, продолжает оставаться дорогостоящим. Хотя имеют место большие достижения в отношении снижения стоимости создания передающих систем большой емкости с использованием волоконной оптики, доступность к таким системам волоконной оптики и коммутация сигналов по таким системам волоконной оптики продолжают оставаться дорогостоящими. Стоимость переключения сигналов с одного канала на другой в транзитных междугородных телефонных станциях (МТС) остается высокой, что приводит к тому, что группы МТС технически оборудуются с таким расчетом, чтобы как можно больше избегать использования соединений транзитных МТС. (Считается, что даже во время часов "пик" рабочего дня менее чем 5% междугородной нагрузки, переключаемой через сеть АТ&Т, направляется через коммутатор транзитной МТС). Проблема предшествующего уровня техники состоит в том, что по причине больших междугородных станций, продолжающих основываться на использовании дорогостоящих междугородных коммутаторов для переключения транзитных вызовов, а также доступов междугородных вызовов к междугородной сети, обычно рекомендуют технически всесторонне (то есть на все возможные случаи связи) оснащать высокочастотный транзит, что является малоэкономичным, чтобы ограничить величину разговорной нагрузки, требующей транзитной коммутации в междугородной сети.
Разработан новый стандарт в отношении комбинаций передачи в широкой полосе и более узкой полосе пакетных и канальных сигналов по широкополосным линиям связи. Этот стандарт, именуемый как стандарт асинхронного режима передачи (АРП), объединяет данные в блоки данных, каждый блок данных содержит множество ячеек, каждая ячейка имеет длину 53 байта, из 53 байтов 5 байтов отведены заголовку и 48 байтов - полезной нагрузке. Когда передается сегмент АРП, каждая из ячеек может быть озаглавлена заголовком для отдельного места назначения, которое идентифицировано в заголовке. Не было сделано ни одного сколь-либо заслуживающего внимания предложения в отношении экономичного использования АРП для передачи речевых сигналов от входа в сеть связи ко множеству выходных узлов сети. Хотя стандарт АРП считается увеличивающим использование широкополосных сетей связи, в частности, тех, в которых используются средства связи на базе волоконной оптики, экономичного решения не было внесено в проблему проектирования сети связи для передачи большого множества речевых сигналов от любого из множества входных узлов сети к любому из множества выходных узлов сети, используя стандарт АРП. В частности, не было сделано сколь-либо заслуживающего внимания предложения по экономичному использованию АРП для передачи речевых сигналов, генерируемых в качестве сигналов импульсно-кодовой модуляции (ИКМ) и мультиплексированных на средствах ИКМ, и для переключения таких сигналов между коммутационными системами или модулями, и для переключения по коммутационным сетям для передачи и переключения с использованием средств связи АРП и коммутаторов.
Отмечается растущая потребность в очень больших коммутационных системах связи или их эквивалентах. Ранее эта потребность частично удовлетворялась за счет использования более мелких коммутационных систем, взаимосвязанных с помощью транзитных коммутационных систем средней емкости. В коммутационной системе, такой как коммутатор 5ESS® фирмы AT&T, была разработана очень большая система, в которой используются коммутационные модули значительной емкости, соединяемые коммутатором каналов с часовым механизмом. Однако ни одно из возможных технических решений не привело к экономически удовлетворительному решению в отношении потребности в очень большой коммутационной системе или группе систем для обработки значительных количеств телефонных нагрузок, низкоскоростных информационных нагрузок сетей связи и высокоскоростных информационных нагрузок сетей связи. Не было сделано ни одного заслуживающего внимания предложения в отношении экономичного использования АРП для получения очень большой коммутационной системы очень большой емкости или большой группы небольших коммутационных систем, тесно взаимосвязанных.
В заявке на Европейский патент 225714 описаны устройства для ассемблирования составных пакетов, причем каждый пакет содержит данные для множества сетей связи к различным узлам назначения коммутатора и для обратного ассемблирования и перекомпоновки таких пакетов с целью создания пакетов, предназначенных для одного узла назначения. В работе K.Y. Eng et al.: A Framework For National Broadband (ATM/B-ISDN) Network; International Conference On Communications ICC '90, т. 2, апрель 1990, Atlanta U.S., c. 515-520 описаны устройства для национальной широкополосной сетевой архитектуры, включающей большие коммутаторы АРП, межсоединенные с помощью широкополосных средств и систем цифрового доступа и перекрестной связи.
Вышеназванные проблемы решаются с помощью настоящего изобретения, в котором множество информационных каналов, каждый предназначенный для общей выходной коммутационной системы либо модуля или группы таких систем либо модулей (узлов), объединяются в одну ячейку АРП или АРП-подобную ячейку, где речевые или узкополосные каналы данных передаются за счет использования таких ячеек, передаваемых со скоростью повторения, которая является одной и той же или кратной скорости повторения сигналов импульсно-кодовой модуляции (ИКМ), которые представляют собой речевые сигналы; ячейки передаются по постоянным виртуальным каналам (ПВК) с постоянной скоростью передачи бит (ПСПБ) между входным узлом и выходным узлом сети связи. Постоянные виртуальные каналы выполнены как поток информации между конкретными входным и выходными узлами сети связи, но такие каналы должны включаться и отключаться только в случае, когда требуется или может быть освобождена дополнительная группа (размер группы определяется числом речевых каналов, которые передаются в каждой ячейке). ПВК обеспечивается в случае, когда данные коммутационных сигналов этого ПВК загружаются в часть памяти узлов, через которые проходят ПВК. ПВК активизируется, если данные движутся в активное запоминающее устройство для коммутационных сигналов этого ПВК, и сигналы посылаются по этому ПВК. В одном из вариантов выполнения изобретения каждый из 46 или 48 байтов полезной нагрузки ячейки несет байт другого канала ИКМ. В отношении каналов ИКМ, которые передают более чем 64 кбит/с, например каналы 384 кбит/с, несколько байтов, в примере 6, ячейки используются для одного канала. Предпочтительно при использовании этого вида монтажной схемы использовать систему перекрестного соединения АРП, также именуемой здесь как общая широкополосная платформа (ОШП), в промежуточных узлах для соединения трактов (участков) постоянного виртуального канала между входным и выходным узлами. Устройство для осуществления функций ОШП, описано в Electrical Engineering, том 65, N 1, октябрь 1991 г, с. 12-18. Такая система перекрестного соединения АРП выполняет функции систем, таких как системы перекрестного соединения цифрового доступа (СПСЦД) фирмы АТ&Т, по сигналам АРП и поэтому намного проще, чем междугородный коммутатор. Преимущественно, поскольку виртуальные тракты соединяют входной коммутатор с выходным коммутатором, управляющие сигналы должны передаваться в данном случае только между этими двумя коммутаторами и не требуется их посылать промежуточным коммутаторам, когда ПВК уже возбужден. Возбуждение ПВК может потребовать нотификации промежуточных ОШП, если эти ОШП уже не имеют управляющих данных ПВК в активной памяти. Преимущественно системы перекрестного соединения АРП могут взаимно соединяться с использованием широкополосных средств связи. Преимущественно такая схема монтажа упрощает нормальный процесс выбора канала для использования при установлении соединения для нового телефонного вызова. Преимущественно скорость активизации и дезактивизации ПВК в ответ на изменения в схемах движения достаточно низкая, так что эти системы перекрестного соединения АРП могут легко устанавливать и аннулировать тракты виртуальных каналов в соответствии с требованиями изменения нагрузки.
Когда нет изменений в нагрузке, то есть когда уровень нагрузки между разными некоторыми входными и выходными узлами не изменяется в достаточной мере, чтобы требовать добавления постоянного виртуального канала между двумя узлами и соответствующего удаления других постоянных виртуальных каналов, системы цифрового перекрестного соединения выполняют простую функцию. Функция состоит в маршрутизации ячейки каждого временного интервала, 125 мкс, от входного тракта до обозначенного выходного тракта для каждой такой ячейки. Это является основной функцией системы перекрестного соединения АРП. Далее, скорость изменения обеспеченных ПВК особенно низкая, требующая только очень длительных интервалов реагирования на запрос в отношении обеспечения дополнительных неактивных ПВК.
Проблема получения большой коммутационной системы высокой емкости или большой группы тесно взаимосвязанных небольших коммутационных систем решена в соответствии с изобретением, в котором сигналы от множества каналов импульсно-кодовой модуляции (ИКМ), где каждый канал предназначен для одного вызова связи, каждый из вызовов предназначен для общего коммутационного модуля или независимой коммутационной системы, пакетируются в одну объединенную ячейку АРП или АРП-подобную ячейку, и в котором речевые сигналы передаются на и от общей широкополосной платформы (ОШП) для коммутации ячеек АРП с использованием таких ячеек, передаваемых со скоростью повторения, которая равна или кратна скорости повторения сигналов ИКМ, которые представляют собой речевые сигналы; ячейки передаются по постоянным виртуальным каналам (ПВК) с постоянной скоростью передачи бит (ПСПБ) от входного коммутационного модуля или системы на ОШП, на выходной коммутационный модуль или коммутационную систему. Постоянные виртуальные каналы обеспечиваются как нагрузка между конкретными изменениями входного и выходного коммутатора или модуля, но такие каналы нуждаются в активизации или дезактивизации только в случае, когда требуется или может быть освобождена дополнительная группа (размер группы определяется числом речевых каналов, которые передаются в каждой ячейке). Преимущественно применение этого вида монтажной схемы, системы перекрестного соединения АРП, ОШП может использоваться для соединения трактов постоянного виртуального канала между входной и выходной коммутационными системами или модулями.
В соответствии с одним вариантом выполнения каждая объединенная ячейка АРП переносит один байт, каждый из 46 или 48 речевых сообщений, и объединенные ячейки ПВК с ПСПБ передаются со скоростью передачи одна ячейка за 125 мкс. Преимущественно такая монтажная схема упрощает интерфейс с существующими системами ИКМ.
Экономичное использование АРП для передачи речевых сигналов ИКМ достигается в соответствии с изобретением, где множество сигналов ИКМ, каждый предназначенный для общей по месту назначения коммутационной системы либо группы или коммутационного модуля либо группы, преобразуется в ячейки АРП или АРП-подобные ячейки посредством нового интерфейсного блока АРП (БАРП), выходные речевые сигналы которого передаются с использованием таких ячеек, каждая из которых несет множество речевых каналов, передаваемых со скоростью повторения, которая равна или кратна скорости повторения сигналов ИКМ, которые представляют собой речевые сигналы; ячейки передаются от БАРП на коммутаторы АРП (общие широкополосные платформы или ОШП) с постоянной скоростью передачи бит (ПСПБ) по постоянным виртуальным каналам (ПВК) между БАРП и ОШП. Преимущественно такая монтажная схема дает возможность использования стандартного кодирования ИКМ и аппаратуры уплотнения каналов ИКМ для интерфейсной связи с абонентами и/или локальными АТС (автоматическими телефонными станциями) и дает возможность использовать средства АРП и коммутаторы для взаимного соединения БАРП и их соединенных коммутационных модулей или систем.
В соответствии с одним вариантом выполнения каждая ячейка АРП несет один байт каждого канала, обслуживаемого ячейкой. Преимущественно такая монтажная схема посылает байты канала со скоростью один байт в течение каждых 125 мкс; это устраняет необходимость в дополнительной буферизации и сводит до минимума нежелательную задержку при передаче сигналов по двухпроводным телефонным средствам связи, тем самым снижая эхо-проблемы.
В соответствии с одним вариантом выполнения изобретения предусматривается использование множества ПВК с ПСПБ, причем множество представляет избыток числа ПВК, которое фактически может передаваться в любой момент времени, однако только постоянные виртуальные каналы, которые были возбуждены, могут передавать сигналы для телефонных вызовов. Дополнительные ПВК возбуждаются в случае необходимости, если все каналы ПВК между источником и узлом назначения полностью заняты, то есть если все эти ПВК не имеют свободных каналов.
В соответствии с одним вариантом выполнения изобретения, когда необходимо активизировать дополнительный постоянный виртуальный канал с ПСПБ, используются принципы, аналогичные принципам маршрутизации нагрузки сети в реальном масштабе времени, как описано в патенте США 5101451. Предпочтительный выбор дополнительного ПВК с ОШП, подлежащего активизации, представляет собой ПВК с ПСПБ, который проходит по прямому тракту между входным и выходным узлами. Если такой ПВК с ПСПБ невозможен, тогда выбирается альтернативный ПВК с ПСПБ в соответствии с выбором трактов, которые менее нагружены. Преимущественно такая монтажная схема распределяет дополнительную нагрузку по линиям связи, которые наиболее легко воспринимают эту нагрузку.
В соответствии с другим вариантом выполнения изобретения группа каналов, переносимая некоторыми ПВК с ПСПБ, вся является одним каналом связи, то есть для передачи нагрузки от конкретного узла источника до конкретного узла назначения, за исключением оговоренного в следующем разделе. Преимущественно такая монтажная схема дает возможность выбирать канал узлу источника без необходимости согласования или иной проверки с узлом назначения; это сокращает время установления соединения вызова и использование средств обработки вызова.
В соответствии с другим вариантом выполнения изобретения некоторые ПВК с ПСПБ несут двустороннюю нагрузку в заданных каналах. Например, в ячейке АРП половина каналов, переносимых этой ячейкой, может быть распределена для одного направления инициирования вызова (например, исходящие вызовы от узла), а другая половина - для другого направления (например, поступающие на этот узел). Преимущественно такая монтажная схема сокращает минимальный размер числа каналов, составляющих маршрут, несущий по крайней мере один вызов в каждом направлении, одновременно устраняя хорошо известные проблемы "дрожания".
В соответствии с одним аспектом предпочтительного варианта выполнения изобретения узлы периодически сообщают своим соседям текущее состояние занятости каждого тракта сети. Затем используются принципы маршрутизации нагрузки сети в реальном масштабе времени, как описано в патенте США 5101451, чтобы выбрать направление, в котором выбирается наименее занятый маршрут между двумя узлами, имеющими прямые тракты с высокой нагрузкой, путем выбора этой комбинации двух или трех последовательных трактов, которая ведет к использованию наименее занятых трактов. Такая монтажная схема обеспечивает управление выбором маршрута непосредственно с помощью входного узла.
На фиг. 1 показана блок-схема, показывающая сеть коммутаторов подключения, соединенных друг с другом;
на фиг. 2 - схема соединений с коммутаторами подключения такой сети;
на фиг. 3 - один интервал длиной 125 мкс ячеек АРП (сокращения приведены в конце описания изобретения); ячейки с постоянной скоростью передачи бит (ПСПБ), несущие речевые каналы, используются для передачи каждые 125 мкс;
на фиг. 4 - сегмент АРП, содержащий ячейку ПСПБ и ячейку с изменяемой (переменной) скоростью передачи бит (ИСПБ);
на фиг. 5 - ячейка ПСПБ для реализации двусторонней нагрузки;
на фиг. 6 - сеть передачи сигналов синхронной сети оптической связи (СCOС)/АРП по фиг. 1;
на фиг. 7 - блок-схема коммутатора подключения по фиг. 1;
на фиг. 8 - блок-схема блока интерфейса асинхронного режима передачи (БАРП) для установления связи между сигналами ИКМ и сигналами АРП;
на фиг. 9-13 - различные блоки БАРП;
на фиг. 14 - управляющий комплекс блока общей широкополосной платформы (ОШП) для коммутирования ячеек АРП;
на фиг. 15-17 - схемы последовательности операций, показывающие процессы выбора канала для связи, включающих в себя активизацию постоянных виртуальных каналов и объединение нагрузки частично нагруженных постоянных виртуальных каналов.
Фиг. 1 представляет собой блок-схему, на которой показано множество взаимосвязанных систем коммутаторов подключения сети. Группа коммутаторов 1 подключения имеет доступ к общей сети 10 перекрестного соединения в соответствии с настоящим изобретением. Сеть перекрестного соединения является сетью перекрестного соединения АРП, содержащей множество взаимосвязанных узлов перекрестного соединения АРП. Каждый узел перекрестного соединения АРП способен переключать каждую входящую ячейку по любой входящей линии на любую выходящую линию. Ячейки с постоянной скоростью передачи бит (ПСПБ) используются для передачи речевой нагрузки ИКМ и ячейки с изменяемой скоростью передачи бит (ИСПБ) используются для передачи объединенных в пакеты данных. Большую часть нагрузки, проходящей через сеть перекрестного соединения АРП, когда она используется как междугородная сеть связи, составляет нагрузка ПСПБ, где индивидуальные ячейки ПСПБ через каждый цикл 125 мкс соединяются с местом назначения. Узел перекрестного соединения АРП может использоваться для общей широкополосной платформы (ОШП), благодаря наличию ПВК и относительно низкой скорости активизации и дезактивизации этих ПВК. Схема маршрутизации для конкретного постоянного виртуального канала (ПВК) не изменяется такое количество времени, сколько обеспечивается ПВК; ПСПБ может направляться в соответствии с ПВК в течение времени, пока ПВК остается активным. Динамическая часть коммутации узлов АРП главным образом связана с коммутацией ячеек ИСПБ, заголовки которых могут быть разными в каждом цикле 125 мкс и которые должны коммутироваться соответственно.
Термин ИКМ, как он используется в описании, означает и речевые сигналы, передаваемые ИКМ, и данные (включая факсимильную связь и видеосвязь), передаваемые по каналам ИКМ.
Узел, как определено в описании, является объектом, который собирает и комплектует выходную нагрузку и который распределяет входную нагрузку. Блок интерфейса асинхронного режима передачи (БАРП), описываемый ниже, является одним примером такого узла, который может распределять нагрузку по множеству коммутационных модулей одного или более коммутаторов 5ESS® или который может распределять нагрузку по одному или более автономным коммутаторам. Узел является доступом к сети для взаимосоединения таких узлов или является промежуточной коммутационной точкой в такой сети.
На фиг. 1 показан обмен сообщениями, необходимый для завершения выбора канала ПВК с ПСПБ. Входной узел посылает сигналы на выходной узел (сообщение 3) об идентичности источника и частей назначения и идентификации ПВК. Узел назначения сообщает с подтверждением (сообщение 4) правильную идентификацию тракта.
На фиг. 1 также показаны тракты, напрямую соединяющие между собой коммутаторы подключения. Эти коммутаторы подключения взаимосвязаны посредством трактов 5 коммутаторов взаимного подключения, которые несут сигналы СCOС/АРП и соединены с центральной сетью 10 передачи сигналов СCOС/АРП посредством трактов 6 доступа СCOС/АРП. Термин СCOС (синхронная сеть оптической связи) используется здесь для обозначения любого или обоих стандартов США (СCOС) или европейского стандарта СЦИ (синхронная цифровая иерархия). СCOС/АРП означает сигналы СCOС или СЦИ, используемые для переноса ячеек АРП.
Сами коммутаторы подключения подключены через множество локальных коммутаторов и, как показано на фиг. 2, локальные коммутаторы соединяются с коммутаторами подключения с помощью цифровых линий связи, как американская 24-канальная традиционная линия связи многоканальной системы передачи дискретной информации с использованием ИКМ или европейские 32-канальные системы для переноса сигналов ИКМ, которые преобразуются в коммутаторах подключения в ячейки ПСПБ сигналов АРП. Когда сами цифровые линии связи несут объединенные в пакеты данные, то в этом случае эти данные обрабатываются блоком коммутации пакета в рамках КМ, посылаются через блок ВСК этого КМ на БАРП, где они преобразуются в ячейки АРП с ИСПБ и передаются по ПВК с ИСПБ на ОШП. Дополнительно каналы тональной сигнализации обрабатываются как каналы ПСПБ или ИСПБ и переносятся соответственно в каналы ячейки ПСПБ или ячейки ИСПБ одного канала описанного ниже типа. Необходимо отметить, что при переносе каналов тональной сигнализации через сеть АРП необходимость в отдельной системе тональной сигнализации с использованием точек передачи сигнала (ТПС) отпадает.
На фиг. 3 показан один цикл в 125 мкс типичного сигнала АРП, который появляется на выходе блока интерфейса асинхронного режима передачи (БАРП) (фиг. 8). Цикл в 125 мкс состоит из ряда ячеек ПСПБ и ряда ячеек ИСПБ. Для удобства они показаны как сгруппированные в начале и в конце каждого интервала, но можно также распределить ячейки ИСПБ среди групп ячеек ПСПБ. Преимущество группирования ячеек ПСПБ, таким образом, состоит в том, что приоритет ячеек ПСПБ может быть обеспечен, и конструкция процессора файла ячеек (фиг. 11, блок 630) упрощена. Сигналы, поступающие в БАРП, распределяются между ячейками ПСПБ и ИСПБ. Ячейки ПСПБ передаются от общей широкополосной платформы (ОШП) (блок 550, фиг.8) по возможности сразу после их приема, тем самым обеспечивая им приоритет по сравнению с ячейками ИСПБ; выход ОШП соединен с БАРП, за счет чего он имеет перемежающиеся ячейки ПСПБ и ИСПБ.
На фиг.4 показано содержание ячейки ПСПБ и ячейки ИСПБ. Содержание ячейки ПСПБ включает в себя сигналы для множества каналов. Так как ячейка АРП содержит 5-байтовый заголовок и 48 байтов полезной нагрузки, пригодной монтажной схемой будет та, которая идентифицирует 5-байтовый заголовок конкретного постоянного виртуального канала, представленного ячейкой ПСПБ, и имеет ячейку ПСПБ, которая содержит индивидуальные байты (выборки ИКМ) 48 речевых каналов (DSO-сигналы).
Альтернативно, 46 DSO были перенесены и двухбайтовый индекс для идентификации, какая группа 46 DSO по данному виртуальному каналу передается в конкретную ячейку. В этом альтернативном варианте множество ячеек АРП для одного виртуального тракта передается каждые 125 мкс, но ячейки с конкретным индексом посылаются только один раз каждые 125 мкс. Альтернативная монтажная схема служит для снижения числа виртуальных трактов, которые сеть связи должна поддерживать.
Ячейка ИСПБ, показанная на фиг.4, содержит заголовок и полезную нагрузку, где полезная нагрузка связана с одним каналом и одним местом назначения в соответствии со стандартами МККТТ в отношении АРП. Действительно, ячейка ИСПБ представляет собой часть пакета данных, передаваемых от коммутаторов подключения данного источника на коммутатор подключения назначения междугородной телефонной сети.
Разумеется, можно также иметь ячейки ПСПБ, все содержание которых отведено одному сообщению, если передача сообщения является такой связью, как сигнал 1,5 Мбит/с, необходимый для уплотненного телевизионного сигнала. В случае широкополосных сигналов, таких как телевидение высокой четкости (ТВЧ), более удобно соединять эти сигналы непосредственно с ОШП. Основываясь на использовании, выбранном для ПВК с ПСПБ, как оно выбирается в данном случае коммутатором подключения источника, полезная нагрузка в каждой ячейке используется так, как она выбрана, с одним и тем же расположением, производимым для всех ячеек, передаваемых по ПВК с ПСПБ в течение длительности существования этого ПВК.
На фиг. 5 показана одна ячейка ПСПБ, несущая двустороннюю нагрузку, первые n байтов передают на n каналов исходящей нагрузки, а байты от (n плюс 1) до 48 передают на (48 минус n) каналов входящей нагрузки. Так как выходной узел подключает канал, байты для исходящей нагрузки комплектуются одним узлом, а байты для поступающей нагрузки - другим узлом. Так как предоставление свободных каналов исчисляется до 1 вверх для исходящей нагрузки и вниз от 48 для поступающей нагрузки, то если много меньше, чем общее количество каналов являются активными, тогда вообще будет возможно передвинуть точку деления, установленную в этом случае между каналом n и каналом n плюс 1 в направлении дополнительных запросов в отношении каналов. Ячейки ПСПБ двусторонней нагрузки, в частности, полезны для переноса нагрузки между источником и местом назначения, когда предусматривается относительно небольшая такая нагрузка.
На фиг.6 показана структура сети передачи сигнала СCOС/АРП. Эта сеть содержит группу ОШП 550, взаимосвязанных частично или полностью посредством трактов СCOС/АРП межсоединенной ОШП. Каждая ОШП содержит взаимосвязанный модуль 535 управления АРП (МУА) для регистрации и управления виртуальными соединениями, устанавливаемыми в соединенной ОШП. Каждая из ОШП 550 в сети 10 выполняет только функцию перекрестного соединения, осуществляемую под управлением присоединенного МУА. ОШП 550 соединяются с упомянутыми коммутаторами 1 подключения посредством трактов 6 доступа.
Чтобы полностью использовать преимущество необходимых компонентов монтажной схемы маршрутизации нагрузки сети в реальном масштабе времени, может потребоваться обеспечение виртуальных каналов, как одно- или двухтрактовый виртуальный канал, из которых один или оба тракта могут потребовать использования постоянно предоставленной промежуточной ОШП. Это упрощает процесс выбора ближайшего оптимального обеспеченного канала для активизации, когда это становится необходимым, хотя обеспечение активных каналов может не быть оптимальным.
На фиг. 7 представлена блок-схема коммутатора 1 подключения. Коммутатор 5ESS® производства фирмы АТ&Т, подробно описанный в АТ&Т Technical Journal, том 64, N 6, часть 2, июль-август 1985, с. 1303-1564, является коммутатором, описанным для использования по изобретению. Он включает в себя множество коммутационных модулей. Вход от локального коммутатора 2 (фиг.1) оканчивается на коммутационном модуле 510. Этот коммутационный модуль содержит оба блока цепи и коммутации пакета, и такой модуль описан у M.W.Beckner, J.A.Davis, E. J. Gausmann, T. L. Hiller, P. D. Olson и G.A.VanDine в патенте США 4592048 "Integrated Packet Switching and Circuit Switching System". Этот модуль управляется процессором 511 модуля коммутации, который взаимодействует с манипулятором 513 сообщений для приема и передачи сообщений. Входы системы передачи дискретной информации с использованием ИКМ от локальных коммутаторов 2 оканчиваются в цифровом интерфейсе 515 и коммутируются в результате двустороннего обмена 517 временными интервалами. Так как сигналы, поступающие на цифровой интерфейс, также содержат сигналы коммутируемого пакета (например, сигналы от D-каналов источников цифровой сети (связи) с комплексными услугами (ЦСКУ)), то также предусмотрен блок 519 коммутации пакета. Выходы этого блока коммутации пакета подаются на блок двустороннего обмена временными интервалами для дальнейшей коммутации по выходным цифровым трактам КМ 510. Дополнительно блок 521 интерфейса СCOС предусмотрен для соединения с сигналами ИКМ, передаваемыми по линиям связи СCOС от локальных коммутаторов. Выходы коммутационного модуля 510 представляют собой группу трактов управления и синхронизации сети (УСС 523,....,524) (обычно до 20). Сигналы трактов УСС передаются по трактам волоконной оптики и могут быть выполнены достаточно длинными для возможности дистанционного размещения КМ. Подгруппа этих 20 трактов тогда оканчивается в блоке 540 интерфейса асинхронного режима передачи (БАРП). Другие подгруппы соединяются с другими БАРП, последние также соединяются с ОШП 550. Выход БАРП представляет собой множество сигналов СCOС/АРП для общей широкополосной платформы (ОШП) 550. МУА, продолжение модуля 530 организации прохождения (МО), используется для управления коммутационными соединениями в общей широкополосной платформе 550 и осуществления общих функций в отношении множества коммутационных модулей, соединенных с конкретной общей широкополосной платформой (ОШП) 550. ОШП также используется для коммутации сигналов между различными коммутационными модулями 510, соединенными с ОШП 550, чтобы транспортировать транзитные вызовы между локальными коммутаторами 2, которые не соединены с общим коммутационным модулем.
На фиг.7 показана конфигурация, в которой БАРП может быть физически отделен от ОШП и КМ; оба тракта УСС и СCOС/АРП выполнены для возможности передачи сигналов на большие расстояния. Очевидно, что если БАРП примыкает к или является частью либо КМ, либо ОШП, эти средства могут быть упрощены.
Как и блок перекрестного соединения АРП, ОШП способна выполнять функцию соединения ячеек АРП между входами АРП и выходами АРП. Для обеспечения того, чтобы сложные ячейки ПСПБ, которые несут речевую нагрузку, не задерживались или не терялись, ячейки ПСПБ получают высокий приоритет. Они посылаются на линии связи, которые выбраны как имеющие достаточную ширину полосы частот, чтобы поддерживать их перенос, а буферизация всегда в состоянии распределить эти ячейки. Имитационное моделирование показало, что вероятность задержки через ОШП при превышении 50 мкс в отношении ячейки ПСПБ, даже когда линии связи полностью загружены, составляет менее 1•10-11. Передача сигналов узкополосных ИСПБ и ячеек с другим приоритетом гарантируется благодаря резервам ширины полосы частот в линиях связи, которые зарезервированы для этой цели. Эти ячейки ИСПБ используют буферы, которые отделяют их от ячеек ПСПБ, даже если они в одной и той же линии связи. Широкополосные соединения используют отдельные линиии связи, непосредственно входящие в ОШП. Эти широкополосные сигналы используют разные буферы в ОШП, которые отделяют их от буферов узкополосных ПСПБ и ИСПБ.
ОШП может соединяться с сетью, как показано на фиг.1, или может просто использоваться для соединения с группой БАРП и их соединяемых КМ для образования одной очень большой коммутационной системы или группы коммутационных систем, при этом большая система или группа соединяется с другими коммутационными системами через сеть, соединенную с КМ. В течение переходного периода существующие мультиплексированные реле времени (описаны в упомянутом АТ& Т Technical Journal, например, на с. 1425-1426) могут продолжать нести часть нагрузки используемых КМ, а БАРП и ОШП могут нести остальную нагрузку.
Хотя в этом варианте выполнения входные сигналы на БАРП поступают от группы коммутационных модулей одной коммутационной системы, такой как модуль коммутатора 5ESS, технические решения согласно изобретению могут применяться в равной степени, если вместо коммутационных модулей отдельные коммутационные системы соединяются с БАРП.
На фиг.8 представлена блок-схема блока 540 интерфейса асинхронного режима передачи (БАРП). БАРП в целом управляется центральным контроллером БАРП (ЦК БАРП). Входные сигналы поступают от блока 517 обмена временными интервалами одного или более коммутационных модулей 510. Выходные сигналы поступают на общую широкополосную платформу (ОШП) 550. БАРП считается входным и выходным узлом сети связи, а ПВК соединяет два БАРП. Это дает возможность передавать нагрузку, собираемую от нескольких КМ, по одному ПВК от одного БАРП другому БАРП. Выходные сигналы блоков 517 обмена временными интервалами, которые представляют собой группы трактов УСС, поступают на пространственный коммутатор 610, который имеет 48 выходов, ведущих к широкому буферу 620 ячеек (ПБЯ). Каждый тракт УСС передает 512 16-битовых временных интервала каждые 125 мкс. 16 бит включают в себя 8 ИКМ или биты данных пользователя, 7 внутренних управляющих бит и один бит паритета. Все биты, кроме 8 бит ИКМ, игнорируются до образования ячейки АРП. ШБЯ 620 включает 48 отдельных побайтно организованных блоков памяти, выходы которых могут затем использоваться параллельно для образования 48-байтовой полезной нагрузки ячейки АРП. Пространственный коммутатор используется для коммутации выходов трактов УСС с соответствующим одним из блоков 621,..., 625 памяти с 48 виртуальными каналами, 48-байтовый параллельный выход и 5-байтовый выход, представляющий заголовок, от процессора 630 списка ячеек поступают на один из 8 сдвиговых регистров 651, . ..,652. Конкретный сдвиг выбирается одним из блоков 653,..., 654 выборки с управлением от процессора 630 списка ячеек. Выход каждого из этих сдвиговых регистров поступает через один из селекторов 663,...,664 ПСПБ/ИСПБ на блок 661,...,662 обработки линии (БОЛ), и каждый БОЛ генерирует поток данных СCOС/АРП. Эти 8 потоков данных затем коммутируются в общей широкополосной платформе (ОШП) 550. Термин ОШП, как он используется в настоящем описании, означает коммутатор перекрестного соединения АРП, имеющий в этом случае входы и выходы АРП/СCOС. Обработка ячеек ИСПБ описывается ниже. Подробности обработки пакетов для ячеек ИСПБ приведены в разделе 4.4 подробного описания изобретения.
Число трактов УСС, которое может оканчиваться на одном пространственном коммутаторе, ограничено скоростью блоков памяти ШБЯ и ПСЯ. Если несколько КМ оканчивается на одном БАРП, желательно максимизировать количество; в предпочтительном варианте выполнения используется 20 трактов УСС, но с помощью настоящего способа возможно использовать большее количество, например 60.
На фиг.9 показан пространственный коммутатор 610. 48 селекторов 701,..., 702, каждый управляемый управляющим блоком 703,...,704 памяти, используется для коммутации выходов входящих трактов УСС с соответствующим одним из блоков памяти 48 виртуальных каналов, которые образуют широкий буфер ячеек. Каждый байт в каждом из трактов УСС может поступать на одну из 48 позиций в широком буфере ячеек. Кроме того, селектор 710, управляемый управляющим блоком 711 памяти, используется для направления (пакетных) данных с переменной скоростью передачи бит, включая сигнализацию и другие сообщения, на устройство 670 сообщений по уровням (УСУ) (фиг.8). УСУ преобразует сообщения в ячейках АРП, которые передаются процессором 630 списка ячеек через селектор 663, ..., 664 ПСПБ/ИСПБ в один из БОЛ 661,...,662 в ОШП после передачи ячеек ПСПБ в течение данных 125 мкс.
На фиг. 10 показан широкий буфер 620 ячеек. Он содержит 48 8- байтовых блоков памяти, т.е. 48 блоков 621, 622,...,623, каждый из которых содержит буфер 801 8 бит на N байтов и управляющий блок 802 памяти, где N представляет собой глубину (то есть число ячеек, которое может загружаться) буфера. В соответствии с хорошо известными принципами предшествующего уровня техники, чтобы сохранить целостность блока данных, широкий буфер передаваемых ячеек является дуплексным буфером, то есть одна часть загружается, в то время как другая разгружается; широкий буфер принимаемых ячеек является триплексным, чтобы решить проблемы флуктуации и целостности блока данных. Управляющий блок памяти направляет байты от шины входных УСС на соответствующую позицию в буфере. Дополнительно система выполнена с возможностью передачи псевдослучайного кода для проверки непрерывности каналов DSO по устройствам АРП; в одном варианте выполнения ШБЯ управляющей памяти выполнен с возможностью ввода и детектирования присутствия кода с управлением от ЦК БАРП. Альтернативно тональные сигналы от тональных источников в КМ могут завершаться по каналам DSO и детектироваться на дальнем конце.
На фиг.11 показан процессор 630 списка ячеек (ПСЯ) 630, сдвиговый регистр 651 линии связи (СРЛС) и блок 661 обработки линии (БОЛ). ОШП 630 одновременно считывает ШБЯ, когда происходит управление селектором 653. Это вынуждает производить запись одной 48-байтовой ячейки ПСПБ в СР 651. Дополнительно ОШП подает на выход 5-байтовый заголовок в СР в это же время. Таким образом, полная 53-байтовая ячейка загружается в СР. Ячейка затем сдвигается в БОЛ 661 через селектор 663 ПСПБ/ИСПБ 663. БОЛ 661 обслуживает ячейку по линии связи СCOС до ОШП.
На фиг. 12 показано устройство 620 сообщений по уровням (УСУ). УСУ 620 принимает сообщения о временных интервалах УСС от пространственного коммутатора 610 во взаимодействующих внутренних блоках 1020, 1022,...,1024. Эти сообщения могли быть сообщениями внутренних КМ, сообщениями СС7 или сообщениями от пользователя, как сообщения МККТТ X.25. БСР определяют правильный, заранее обеспеченный, идентификатор виртуальных каналов АРП и сегментируют сообщение в ячейках АРП по спецификациям МККТТ, используя выявленный идентификатор ВК и другие поля заголовков, как предписано спецификациями МККТТ в отношении адаптации уровня АРП.
Эти ячейки затем сдвигаются из блока совместной работы в селектор ПСПБ/ИСПБ и БОЛ 661, показанный на фиг.11, под управлением ОШП. В предпочтительном варианте выполнения выходы объединяются и посылаются на один или более селекторов ПСПБ/ИСПБ.
На фиг. 13 показан блок 1020 совместной работы. Временные интервалы УСС соединяются через селектор 1110 с контроллером 1120 тракта данных. Контроллер 1120 тракта данных обрабатывает протокол уровня битов, который содержит флаги, ввод битов и КЦИ. Второй контроллер 1140 обрабатывает СС7 или протокол доступа к соединительному тракту в сообщениях. Процессор 1130 определяет виртуальный канал с целью использования для сообщений и выдает команду процессору 1160 уровня адаптации АРП (ПУАА) сегментировать сообщение в ячейках АРП. Ячейки АРП помещаются под управлением ПУАА 1160 в буфер 1170 ячеек (не путать этот буфер с широким буфером 620 ячеек (фиг.8)), где они позднее передаются под управлением ОШП 630 (фиг.11) в селектор 663 ПСПБ/ИСПБ (фиг. 11). Ячейки высокого приоритета вводятся в буфер 1170 ячеек до ячеек низкого уровня. Ячейки из буфера 1170 ячеек (фиг.13) составляют ячейки ИСПБ, показанные на фиг.3 (цикл 125 мкс). Буфер ячеек может иметь глубину в несколько ячеек, чтобы иметь возможность размещать ячейки ИСПБ, поступающие от ОШП.
МО служит для обслуживания полностью коммутатора 5ESS и ОШП (включая БАРП) в соответствии с потребностями ООПО. Это включает в себя загрузку и управление ОШП, качественный графический дисплей и связь через АРП с КМ. На фиг. 14 показана архитектура системы МО/ОШП, как содержащая следующие компоненты.
Модуль управления АРП (МУА), включающий непосредственно соединенный терминал. Это вспомогательный процессор устойчивости к сбоям, который соединен с существующим МО коммутатора 5ESS и служит и для обеспечения дополнительной обрабатывающей пропускной способности новых ОШП и БАРП.
Шину Ethernet® для взаимного соединения МО/МУА с графическим интерфейсом пользователя (ГИП), устройством управления пакетом АРП (УУПА) и ОШП.
Периферийные устройства интерфейса малых вычислительных систем (интерфейс SCSI, промышленный стандарт) для оперативной документации на диске, магнитной ленте и ПЗУ на КД: они расширяют энергозависимые внешние устройства существующих МО.
Терминалы рабочей станции ГИП, которая обслуживает существующее коммутационное оборудование 5ESS, ОШП и БАРП.
Устройство управления пакетом АРП придает МО/МУА способность сообщаться через АРП по СCOС с КМ. КМ завершают АРП устройства управления пакетом АРП в их УСУ с интерфейсным блоком АРП. Для связи с КМ МО/МУА посылает сообщения по шине Ethernet на УУПА, которое обрабатывает сообщение в соответствии с преобразованием ячейки и передачей на ОШП по СCOС.
ГИП и энергонезависимая память являются компонентами, выпускаемыми промышленностью, управление которых основано на средствах программирования МУА. Структура компонентов МУА и УУПА пояснена в разделе 5 подробного описания изобретения.
На фиг. 15 показан поиск тракта, который осуществляется процессором 511 модуля коммутации или другим процессором, имеющим данные о состоянии ПВК от соединенного БАРП относительно места назначения вызова. Этот процессор принимает запрос на тракт (блок действия 1200) и определяет (тест 1202), имеются ли возможные тракты (каналы) на прямых активных виртуальных каналах ПСПБ до места назначения требуемого тракта. Если есть, тогда выбирается доступный тракт (блок действия 1204) и отправляется сообщение на узел (обычно процессор для другого БАРП) на другом конце, чтобы известить тот узел, что тракт установлен при конкретном интервале данного активного ПВК с ПСПБ.
Если нет возможных для использования трактов по прямым активным ПВК с ПСПБ, как показал тест 1202, тогда тест 1202 используется для определения, имеются ли доступные тракты на альтернативных активных ПВК с ПСПБ. Если имеются, тогда выбирается возможный тракт от одного из этих альтернативных активных виртуальных каналов (блок действия 1210) и извещается узел на другом конце (блок действия 1206). (Альтернативный активный виртуальный канал является активным виртуальным каналом, использующим альтернативный маршрут, который является маршрутом, который использует по крайней мере два тракта вместо прямого маршрута, содержащего один тракт). Если нет возможных для использования трактов по активным виртуальным каналам для удовлетворения этого запроса о тракте, тогда производится запрос о выделении дополнительного виртуального канала (блок действия 1212). Этот запрос направляется на модуль 530 организации прохождения (фиг.7), который возбуждает дополнительный виртуальный канал, как описано на фиг.16. Совершенно очевидно, модуль организации прохождения реагирует на ПКМ 511 с индикацией успеха или неудачи, и в случае индикации успеха - идентичность выделенного виртуального канала. Тест 1214 используется для определения этого успеха или неудачи. Если запрос о выделении был успешно решен (положительный выход теста 1214), тогда повторно вводится тест 1202, чтобы выполнить процесс выбора возможного тракта. Если процесс выделения оказался неудачным (отрицательный выход теста 1214), тогда выдается сообщение "занято" по всем каналам в отношении того вызова, для которого первоначально был принят запрос о тракте в блоке 1200.
В настоящем описании предполагается, что управляющий процессор как процессор модуля коммутации обслуживает список активных виртуальных каналов с ПСПБ в отношении передачи нагрузки, исходящей от их взаимодействующего коммутационного модуля, и поддерживает активное состояние для каждого канала такого виртуального канала. Разумеется, также можно поддерживать эту информацию иначе, например, в модуле организации прохождения, но рекомендуемая монтажная схема сводит до минимума время, необходимое для установления большинства вызовов. Далее, можно использовать виртуальные каналы с ПСПБ с двунаправленными каналами, но такая монтажная схема, хотя и дает возможность более эффективного использования виртуальных каналов, требует согласования между двумя конечными точками, чтобы предотвратить "флуктуацию" (т.е. ситуацию, когда один и тот же канал захватывается одновременно двумя концевыми узлами, соединенными с каналом).
На фиг. 16 показан процесс активизации виртуального канала с ПСПБ. Предусматривается много больше виртуальных каналов с ПСПБ (т.е. загружаются в блоки памяти сети связи), чем может быть активных в любой данный момент времени. В основном виртуальные каналы с ПСПБ предусматриваются для управления пиковой нагрузкой между любой парой узлов (в этом случае коммутационных модулей). Виртуальные каналы с ПСПБ считаются активизированными, когда они доступны для передачи нагрузки. Процесс активизации предназначен для обеспечения того, чтобы физические цепи АРП, несущие виртуальные каналы с ПСПБ, не перегружались и чтобы дефектные физические цепи АРП не использовались для переноса нагрузки. В случае сбоя, например, все виртуальные каналы с ПСПБ, которые используют дефектную линию связи, должны быть отключены.
В этом варианте выполнения процесс активизации виртуальных каналов с ПСПБ аналогичен процессу захвата индивидуальных междугородных линий связи в соответствии с техническими решениями схемы маршрутизации в реальном масштабе времени, как описано в патенте США 5101451, выданном на имя G.R..Ash et al. , путем маршрутизации дополнительной нагрузки по менее загруженным передающим линиям связи, в данном случае - линии связи СCOС/АРП. Одна отличительная особенность описываемой здесь монтажной схемы, которая не является аналогичной ситуацией, встречающейся при маршрутизации нагрузки по индивидуальным соединительным линиям связи, состоит в использовании разделенных групп, показанных на фиг.5, т.е. активных виртуальных каналов с ПСПБ, часть каналов которых используется для выходной нагрузки в другом направлении. Такие разделенные группы особенно эффективны для использования при переносе нагрузки между двумя узлами, у которых уровень нагрузки относительно низкий. Другое отличие в том, что больше трактов может потребоваться для альтернативно маршрутизированной нагрузки, так что нагрузка некоторых трактов может быть рассмотрена при выборе ПВК альтернативного маршрута для активизации.
Модуль организации прохождения принимает запрос о распределении от процессора 511 коммутационного модуля (блок действия 1300). Модуль организации прохождения сначала определяет (тест 1302), имеются ли виртуальные каналы с ПСПБ, несущие разделенную нагрузку (т.е. исходящую от двух конечных узлов). Если да, модуль организации прохождения определяет, как много каналов на текущий момент занято в каждом направлении, и проверяет, есть ли адекватный резерв в разделенной группе для возможности выделения дополнительных нескольких каналов в направлении, связанном с запросом о выделении. Каналы разделенных групп выполнены таким образом, что первые n каналов определяются в одном направлении и остальные - в другом направлении и что поиск канала осуществляется таким образом, чтобы сохранять средние каналы доступными по мере возможности. Если средние каналы доступны и если число этих доступных каналов достаточно большое, чтобы иметь возможность для перемещения делительной точки (положительный результат теста 1304), тогда разделительная точка перемещается (блок 1306) и два конечных узла информируются об этом (блок действия 1308). Запрашивающий узел информируется об успехе в ответ на запрос о выделении и, если запрашивающий ПКМ снова проводит тесты 1202 и 1208, по одному из них будет осуществляться передача. В этом варианте выполнения разделенные группы сначала проверяются; исследования имитации могут показать, что альтернатива проверки в отношении возможных дополнительных ПВК является более оптимальной.
Если разделенные группы недоступны (отрицательный результат теста 1302) или если есть неадекватный резерв в разделенной группе (отрицательный результат теста 1304), тогда тест 1320 определяет, есть ли доступный свободный обеспеченный прямой виртуальный канал с ПСПБ. Если да, необходимо проверить, вызовет ли активизация дополнительного ПВК с ПСПБ перегрузку (переполнение) на любом тракте, несущем этот ПВК. Если такая перегрузка обнаруживается, этот свободный обеспеченный прямой виртуальный канал с ПСПБ игнорируется и не возбуждается и проводится тест 1324; если перегрузка не вызывается, этот канал активизируется (блок действия 1322) и два конечных узла этого канала информируются об этой активизации (блок действия 1308). В противном случае используется тест 1324 для определения, имеются ли альтернативные возможные виртуальные каналы с ПСПБ. При проведении выбора среди возможных альтернативных каналов с ПСПБ используются принципы маршрутизации сети связи в реальном масштабе времени предпочтительно путем отбора возможных альтернативных виртуальных каналов с ПСПБ, которые используют относительно мало или менее тяжело загруженные линии связи АРП. При выполнении определения, какие линии связи менее тяжело загружены, так как две соединительные цепи предпочтительнее, чем 3-трактовые цепи, нагрузка 2-трактовых цепей может быть проверена путем запроса модуля организации прохождения, соединенного с ОШП, которая соединена с коммутационным модулем места назначения, чтобы сообщить о нагрузке своих цепей АРП. Так как каждая активизация виртуального канала с ПСПБ представляет собой большее использование ресурсов (48 каналов по отношению к 1 каналу), чем в случае для выбора одной соединительной линии для маршрутизации сети в масштабе реального времени, пороговый предел нагрузки, за которым виртуальные каналы с ПСПБ не должны активизироваться, должен применяться в отношении любой линии связи, которая используется предположительным ПВК с ПСПБ. На предел также воздействует величина нагрузки ИСПБ, поддерживаемая линиями связи АРП. Ясно, что этот предел является параметром, который должен быть под контролем администраторов сети, которые могут быть разными для разных линий связи АРП и которые должны регулироваться по мере обогащения опыта эксплуатации.
Следует отметить, что в предпочтительном варианте выполнения все обеспеченные ПВК имеют заранее определенный тракт, пересекающий два конечных узла и переменное число промежуточных узлов. Альтернативно, частично обеспеченные "ПВК" могли бы быть образованы, имея переменный тракт, выбранный во время активизации.
Если нет доступных альтернативных виртуальных каналов с ПСПБ для выделения, тогда система выделения возвращает индикацию о неудаче запрашивающему ПКМ (блок действия 1326). Если выбран доступный альтернативный канал (блок действия 1328) (доступный канал выбирается из альтернативных каналов с относительно низкой нагрузкой), тогда альтернативный канал возбуждается (блок действия 1330) и коммутаторы конечного узла и промежуточной ОШП извещаются об активизации виртуального канала с ПСПБ.
Далее описан процесс объединения активного ПВК с ПСПБ. В ходе нормальной активности междугородных вызовов обычно случается, что различные составные ячейки между двумя конечными узлами неполностью заполнены. Далее, часто случается, что общее число DSO в двух или более активных составных ячейках меньше или равно общему числу DSO, обслуживаемых одной составной ячейкой (48/46). В этом случае необходимо объединить ПВК, несущие эти ячейки, чтобы образовать одну более полно используемую ячейку, которая несет DSO. ПВК для составных ячеек, которые больше не имеют активных DSO, могут быть сделаны в этом случае неактивными, тем самым освобождая ширину полосы частот на одной или более линий связи АРП. Эта освобожденная ширина полосы частот может затем использоваться для составных ячеек между другими источниками и местами назначения. Тем самым достигается более эффективное использование сети связи. Процесс объединения описан на фиг.17.
В нижеприведенном изложении объединяемые составные ячейки описываются как находящиеся между КМ, и процесс объединения осуществляется с помощью ПКМ двух КМ. Альтернативно и прежде всего для архитектуры, в которой несколько КМ соединены с БАРП, поскольку обработка составных ячеек выполняется БАРП, то также можно скомпоновать БАРП как часть ОШП, в этом случае КМ будет управлять объединением составных ячеек вместо ПКМ. Однако обработка будет одной и той же в любом случае, только идентичность процессора будет другой.
Для выполнения объединения процессоры коммутационного модуля непрерывно проверяют активные составные ячейки в отношении состояния частичного заполнения, которое определяется по наличию двух составных ячеек на одно и то же место назначения, так что общее число активных DSO в обеих ячейках меньше, чем общее число DSO в одной составной ячейке (т.е. 48/46). Величина, согласно которой сумма активных каналов в двух ячейках меньше, чем 48/46, является параметром, который должен быть установлен, как результат имитации и опыта. Если этот параметр слишком низкий, например ноль, может произойти перегрузка, а если он слишком высокий, например 10, будет происходить неэффективное использование линий связи. В настоящем описании ячейка и ее соответствующий ПВК используются более или менее взаимозаменяемо. Каждая активная ячейка находится под управлением одного соединенного конечного узла, того конечного узла, который выдает исходящую нагрузку, или, в ячейках с разделенной нагрузкой, это будет узел, выбранный произвольно. Когда управляющий ПКМ (т.е. ПКМ управляющего узла) определяет, что существует состояние частичной загрузки, он посылает запрос на узел места назначения (обычно другой коммутационный модуль), чтобы объединить две составные ячейки. Запрос содержит:
идентичность двух составных ячеек (например, посредством устройства идентификации виртуального канала); одна ячейка является объединенной ячейкой, и одна ячейка является ячейкой, которая должна быть устранена (так как она не будет нести следующее объединение DSO);
список ячеек DSO, переупорядочиваемых из устраняемых ячеек по отношению к объединенной ячейке.
В этом варианте выполнения DSO объединенной составной ячейки остаются в тех же местоположениях ячейки и DSO из устраненной ячейки перемещаются в свободные положения в объединенной ячейке.
Другой узел реагирует путем подтверждения в отношении объединения. В течение периода объединения новые вызовы, которые требуют транспортирования между этими двумя режимами (обычно коммутационными модулями), будут использовать только DSO из объединенной ячейки, которые не заполнены из устраненной ячейки. Вполне возможно, чтобы вызовы могли поступать и тем самым отпирать активизацию ПВК в отношении одной составной ячейки в то время, когда другой ПВК устраняется. Эта маловероятная случайность находится в рамках изобретения до тех пор, пока эвентуально избыточные ПВК устранены.
Для объединения вновь прибывающие сигналы DSO в отношении ячейки, подлежащей устранению, посылаются и в объединенную ячейку, и в устраняемую ячейку. В БАРП пространственный коммутатор передает DSO по тракту УСС от КМ на два разных местоположения ШБЯ.
ПКМ посылает команды на ЦК БАРП для выполнения этой функции. После выполнения этого действия ПКМ посылает сообщение на другой узел, указывая, что вышеназванное действие копирования обнаружено. Другой узел должен послать аналогичное сообщение первоначальному узлу. После приема этого сообщения ПКМ посылает команду на ЦК БАРП, чтобы отключить ПВК устраненной ячейки. ЦК БАРП побуждает пространственный коммутатор считывать DSO из местоположений ШБЯ, связанных с новыми DSO объединенной ячейки из устраненной ячейки. Затем ЦК БАРП удаляет эту ячейку из списка активных составных ячеек ОШП. Устраненные составные ячейки больше не посылаются или не обрабатываются в DSO по трактам УСС. Так как DSO коммутируются через пространственный коммутатор на тракты УСС, нет изменения временных интервалов по трактам УСС на ВСК КМ. Другой конец затем также отключает ПВК устраненной ячейки.
Проблема возникает в том случае, если канал из одной ячейки передается в тот же канал в другой ячейке; в течение периода перехода эта ячейка будет записываться в положение того же канала двух буферных местоположений. Эта проблема может быть преодолена одним из трех способов:
скорость ШБЯ может быть удвоена для возможности проведения двух записей в одном интервале;
объединение может быть выполнено посредством программного обеспечения, чтобы избежать такого переходного состояния;
переходное состояние может быть осуществлено в две стадии: сначала путем освобождения другого канала от передаваемого в ячейку путем копирования занятого канала до свободного положения и затем освобождая ранее занятый канал, после этого путем передачи канала из освобождаемой ячейки вновь освобожденному каналу первой ячейки.
Если два или больше КМ соединены с одним БАРП, любой из ПКМ одного из КМ управляет ПВК, подлежащим отключению, или предпочтительно МО соединенной ОШП управляет ПВК. В любом случае только один процессор управляет процессом объединения в управляющем узле.
Технологическая схема последовательности операций реализации процесса объединения приведена на фиг.17. В некоторой точке процесс объединения начинается процессором, который управляет распределением постоянных виртуальных каналов (блок действия 1400). Проводится тест для определения наличия частично загруженных постоянных виртуальных каналов (тест 1402). Этот тест выполняется путем проверки для обнаружения, имеются ли ПВК с общим источником и узлом места назначения, которые в комбинации несут меньшую нагрузку, чем может нести один ПВК. Так как обычно существует очередность поиска ПВК в отношении конкретного места назначения, большинство неполностью заполненных ПВК обнаруживается в конце такого списка. Так как проверяется каждая пара в отношении состояния неполного заполнения (отрицательный результат теста 1402), чего не должно быть, производится проверка для индикации, что процесс завершен (тест 1404), и если это так, то это есть конец процесса объединения в этот момент времени (блок окончания 1406). Если нет, проверяется другая пара ПВК в отношении состояния неполного заполнения. (Вообще считается, что не более одного ПВК будет нести двунаправленную нагрузку. Двунаправленный ПВК может быть устранен в две стадии, сначала устранением исходящих (выходных) каналов из одного направления и после того, как эти каналы устранены в описываемом процессе, преобразованием устраняемой ячейки не в ячейку неактивного ПВК, а в ячейку однонаправленного ПВК, полностью управляемого теперь другим конечным узлом).
Если обнаружена пара неполностью заполненных ПВК (положительный результат теста 1402) и если обнаружено, что общая нагрузка, выполняемая по тракту, обслуживаемому этими ПВК, может адекватно обслуживаться одним меньшим ПВК (чтобы устранить избыточную операцию активизации-объединения ПВК), тогда управляющий узел (несущий исходящую нагрузку для этого ПВК) объединяет каналы из устраняемой ячейки в целевой ячейке (блок действия 1410). Затем посылается сообщение на дальний конечный узел (узел с поступающей нагрузкой для этого ПВК), информируя этот узел о новых каналах, занимаемых каналами из числа ПВК, который (узел) подлежит отключению (или при нагрузке двунаправленного ПВК преобразуется в однонаправленный ПВК с этой нагрузкой). Исходящий узел также может иметь нагрузку от каналов устраняемой ячейки, передаваемых в ячейку устраняемого ПВК и объединенную целевую ячейку (действие блока 1414). Узел исходящей стороны затем ожидает приема сообщения о положительном подтверждении от узла входной нагрузки (действие 1416). В ответ на это сообщение ПВК, соответствующий устраненным ячейкам, отключается (блок действия 1418) (или в двунаправленном ПВК этот ПВК преобразуется только в ПВК поступающей нагрузки). После действия блока 1418 остальные ПВК проверяются в отношении состояния неполного заполнения (тест 1402).
1. Описание функций блока АРП (БАРП)
На фиг. 7 представлена блок-схема варианта выполнения изобретения, основанного на архитектуре коммутатора 5ESS. Блок интерфейса асинхронного режима передачи (БАРП) обеспечивает сопряжение между коммутационным модулем и общей широкополосной платформой (ОШП). ОШП действует как комбинация модуля связи для взаимного соединения соединенных коммутационных модулей и как перекрестное соединение АРП для соединения через тракты АРП с другими ОШП. Модуль коммутатора 5ESS с нормальным форматом для передачи речевых сигналов и информационных данных является однобайтовым временным интервалом. Формат ОШП является 53 байтовой ячейкой, содержащей 48 байтов для передачи речевых сигналов и информационных данных и 5 байтов для заголовка. БАРП обеспечивает преобразование между однобайтовыми временными интервалами и 53 байтовыми ячейками АРП. Он также обеспечивает комбинацию для передачи многочисленных временных интервалов, необходимых, например, для канала со скоростью передачи бит 384 кбит/с, в различные байты одной ячейки АРП. Модуль коммутатора 5ESS обеспечивает сопряжение с БАРП по трактам управления и синхронизации сети (УСС) (тип 2 тракта), и БАРП обеспечивает сопряжение с ОШП по трактам синхронной цифровой иерархии (СЦИ) или, в американском варианте, по трактам синхронной сети оптической связи (СCOС). СЦИ и СCOС транспортируют по своим трактам ячейки АРП. В результате выполнения коммутирования речевых сигналов и информационных данных ОШП устраняет потребность во временном мультиплексоре, используемом в модуле связи известной предшествующей системы 5ESS. В этом предпочтительном варианте выполнения коммутационный модуль (КМ) больше, чем тот, который описан в упомянутом АТ&Т Technical Journal для получения преимуществ более быстродействующей схемы, доступной сегодня. Размеры КМ описываются ниже соответственно. Хотя в этом варианте выполнения ОШП осуществляет интерфейс через БАРП с помощью коммутационных модулей одной коммутационной системы, он может также легко осуществлять интерфейс с помощью одной или более автономных коммутационных систем.
ОШП также обеспечивает отправку сообщения КМ модулю организации прохождения (МО) (с коммутатора 5ESS) и остальным КМ, тем самым устраняя потребность во внутрикоммутаторном сообщении устройства маршрутизации. БАРП преобразует сообщения КМ из манипулятора сообщений и/или БКП коммутационного модуля 5ESS в формат, пригодный для маршрутизации через ОШП. Для этой цели используется стандартный уровень адаптации АРП. БАРП также обеспечивает транспортировку для функции вмешательства процессора ОШП (ВПО), которая может использоваться для принуждения повторного пуска КМ, если возникает ситуация, которая требует установления в исходное положение.
Сообщения системы передачи сигнальных сообщений 7 (СС7) обрабатываются виртуальными каналами междугородной сети, тем самым обеспечивая информационное сообщение от коммутатора к коммутатору без необходимости вмешательства ТПС для маршрутизации сообщений. (ТПС по крайней мере первоначально также нужна для использования в подключении баз информационных данных путем обеспечения доступа базы информационных данных к сети 10 передачи сигналов). БАРП выполняет эту функцию путем компонования пакетов в ячейках АРП, взаимодействия с виртуальным трактом с помощью кода запятой каждого коммутатора СС7 и затем передачи ячеек на междугородную сеть АРП по выбранному виртуальному тракту.
Описанный предпочтительный вариант выполнения основывается на том, что БАРП тесно взаимодействует с КМ, так как это считается наиболее пригодным с точки зрения междугородной телефонной связи. Также возможен альтернативный вариант, в котором БАРП тесно взаимодействует с ОШП. Если БАРП тесно взаимодействует с ОШП, тогда БАРП принимает свои управляющие сигналы от контроллера ОШП и МО. В случае, когда БАРП тесно взаимодействует с ОШП, управляющие сигналы посылаются через ПВК с ПСПБ или с ИСПБ от МО на центральный контроллер БАРП (ЦК БАРП).
Как показано на фиг. 7, ОШП находится под управлением обслуживания и управлением канала МО. МО действует как основная станция обслуживания в отношении контроллера цикла ОШП, т.е. ОШП. В этом варианте выполнения ОШП служит только как перекрестное соединение АРП и не проводит обработки в отношении видеотрансляции, кадровой передачи или коммутатора коммутируемых в мегабитах данных (ККМД). Альтернативно перекрестное соединение АРП может непосредственно управляться в отношении акцептации входов АРП и коммутирования таких входов с требуемым местом назначения. Такая монтажная схема пригодна, например, для коммутирования таких широкополосных сигналов, как сигналы телевидения высокой четкости (ТВЧ), которые имеют ширину полосы частот, делающей прямое соединение с ОШП более экономичным. МО или другой специальный процессор может использоваться для управления установлением трактов АРП для этих служб.
Здесь предполагается, что компьютеры или другие терминалы, которые посылают и принимают информацию, резервируют адекватную ширину полосы частот для передачи и приема такой информации, прежде чем делать запрос о соединении через ОШП.
2. Типы составных ячеек
Составная ячейка емкостью 48 байтов используется для переноса выборки данных ИКМ из 48 разных вызовов (если эксплуатация происходит при 64 кбит/с речевого сигнала). Ячейки для каждой группы вызовов посылаются каждые 125 мкс, чтобы транспортировать 48 каналов DSO, каждый канал DSO предназначен для передачи 8-битовых выборок ИКМ или данных 8000 раз в секунду.
Альтернативно 46 каналов DSO транспортируются, а двухбайтовый индекс используется для идентификации, какая группа из 46 каналов DSO по данной группе виртуального канала транспортируется в конкретную ячейку. В этом альтернативном варианте множество ячеек АРП для одной группы виртуального канала передается каждые 125 мкс, но ячейки с заданным индексом посылаются только раз каждые 125 мкс. Альтернативный вариант служит для снижения числа виртуальных трактов, которые сеть должна обслуживать, и экономит память в БАРП и ОШП, так как один и тот же вход памяти может использоваться для коммутирования всех ПВК с ПСПБ, которые соединяют данный источник с заданным местом назначения по данному набору трактов.
3. Описание архитектуры
В этом разделе описывается конструкция высокого уровня блока асинхронного режима передачи (БАРП), который используется для осуществления следующих общих функций:
преобразование переноса DSO в составные ячейки АРП и
преобразование сообщений переменной длительности в ячейки АРП.
3.1 Описание преобразования DSO в составную ячейку
В этом описании акцентируется внимание на потоке DSO от коммутатора 5ESS к сети АРП (нагрузка ПСПБ).
3.1.1 Пространственный коммутатор
Блок-схема БАРП показана на фиг.8. Тракты управления и синхронизации сети (УСС) от временной ступени коммутации ВСК 517 КМ показаны оканчивающимися в пространственном коммутаторе в БАРП. Цель пространственного коммутатора состоит в сведении трактов УСС до 48 (или 46) внутренних трактов, в зависимости от чего байт в составной ячейке используется в отношении данного вызова. Эти тракты оканчиваются на матрице запоминающих устройств ячейки, именуемых на фиг. 8 как широкий буфер ячейки (ШБЯ), в которые загружаются выборки 48/46 DSO ИКМ составной ячейки. Таким образом, пространственный коммутатор служит для того, чтобы направлять временные интервалы (DSO) в правильное местоположение составного байта на входе ШБЯ.
3.1.2 Широкий буфер ячейки
Функция широкого буфера ячейки (ШБЯ) состоит в компоновке байтов ячеек виртуальных трактов в формат, который дает возможность их одновременно считывать в одном цикле считывания блока памяти. ШБЯ является буфером, ширина которого составляет размер одной ячейки АРП (не считая байтов заголовка). Ширина составляет 48/46 байтов, и глубина равна числу одинарных активных виртуальных трактов, которые должны существовать в данный момент времени. (В отношении 46-байтовой составной ячейки каждый активный момент ячейки, имеющей конкретный индекс и виртуальный тракт, считается одинарным активным виртуальным трактом). Как показано на фиг.8, каждая позиция байта ИКМ в ячейке записывается в отдельную ячейку памяти, каждая из которых имеет независимую схему управления записью. Каждый адрес ячейки памяти в этих блоках памяти соответствует отдельно виртуальному тракту. (В случае с 46 байтами используются смежные ячейки памяти для множества ячеек АРП в виртуальном тракте). Каждый из этих блоков памяти байтов имеет управляющий блок памяти, который составляет список распределения памяти в отношении индивидуальных временных интервалов тракта 48/46 (только часть ИКМ) относительно местоположения байта одного виртуального тракта в ШБЯ. Так как управляющая память для каждой памяти байта является независимой, каждый активный временной интервал на трактах 48/46 способен перемещаться в любую ячейку памяти виртуального тракта в буфере. Таким образом, байты на трактах 48/46, которые появляются одновременно на входе в ШБЯ, могут загружаться в различные ячейки памяти виртуального тракта в их соответствующих буферных памятях и тем самым компоноваться в разных ячейках виртуального тракта в ШБЯ. Управляющая память способна блокировать запись в байтовую буферную память, если конкретный DSO на тракте УСС не является активным, то есть не используется в настоящий момент для какой-либо ячейки.
3.1.3 Процессор списка ячеек
В течение каждого интервала 125 мкс все активные DSO записываются в предназначенные байтовые ячейки их выбранной ячейки виртуального тракта. Составные ячейки считываются из широкого буфера ячейки каждые 125 мкс с управлением от процессора 630 списка ячеек (ПСЯ), как показано на фиг.8. ПСЯ содержит список активных составных ячеек, которые загружены в память в списке трактов. Список трактов содержит биты заголовков адресов виртуальных трактов АРП и адрес ШБЯ, который содержит составную ячейку виртуального тракта. Список ПСЯ содержит только виртуальные тракты, в отношении которых существуют активные DSO. ПСЯ просматривает список раз каждые 125 мкс, тем самым принуждая передавать каждую составную ячейку. После того как ячейки ПСПБ переданы, ПСЯ считывает ячейки ИСПБ (если таковые есть в порядке очередности) из устройства 670 сообщений по уровням (УСУ), чтобы использовать резервное время в интервале 125 мкс, как показано на фиг.3.
3.1.4 Преобразование в отношении синхронного временного уплотнения (СВУ)
Так как широкий буфер ячеек представляет собой ширину (часть информационных данных) ячейки АРП, вся ячейка АРП может быть считана из широкого буфера ячеек за один доступ. Преобразование параллельного в последовательное осуществляется посредством сдвиговых регистров 651,...,652 с параллельным входом и последовательным выходом, которые выбираются с помощью селектора 653,...,654 сдвиговых регистров (СР), управляемого ПСЯ 630. Считанные информационные данные вместе с данными заголовка АРП из ПСЯ загружаются в сдвиговый регистр, который присоединен к интерфейсу 661,...,662 линии связи СCOС. В 46- байтовой ячейке двухбайтовый индекс также обеспечивается ПСЯ 630. Интерфейс линии связи СCOС присоединен непосредственно к ОШП.
3.1.5 Разное
Остальные области, упомянутые в этом описании, являются двунаправленным переносом данных и речевых сигналов и выполняют такие функции, как тест тракта и контроль, тесты перегрузки АРП для определения, может ли данный выбранный тракт выдержать активизацию от новой нагрузки составной ячейки, а также управление и устойчивости к сбою. Эти моменты подробно изложено в разделе 4.
3.2 Управление БАРП
Управление БАРП обеспечивается центральным контроллером 600 БАРП (ЦК БАРП). Управляющие сообщения принимаются в ЦК БАРП от специализированных временных интервалов, перехватываемых в пространственном коммутаторе и передаваемых на ЦК БАРП по специализированной шине управляющих команд (не показано). Управляющие сообщения передаются от процессора 511 коммутационного модуля (ПКМ) коммутационного модуля (КМ) 510 5ESS через манипулятор 513 сообщений в КМ. Управляющие сигналы от ЦК БАРП распределяются в БАРП по группе шин управляющих сигналов. Пространственный коммутатор 610 обеспечен набором каналов и сообщает об управляющей информации в памяти, выборе активного тракта и выборе активной стороны. Выбор активного тракта используется для определения, какие тракты УСС от КМ являются активными. Альтернативно, E-биты, о которых речь ниже, могут использоваться для идентификации активных трактов, так как E-биты являются активными только для активных каналов. Выбор тракта используется для определения, какие тракты УСС от КМ являются активными. Тракты могут быть либо активными, либо резервными. Выбор стороны определяет, какая сторона БАРП является активной или резервной. Широкий буфер ячеек снабжен картой распределения временных интервалов в отношении виртуальных трактов и распределения позиций байтов в ячейке АРП. Процессор списка ячеек содержит информацию об активных виртуальных трактах и обеспечивает селектор 653,..., 654 сдвиговых регистров информацией об адресах сдвиговых регистров. В этой структуре БРП БАРП может обслуживать более чем одну линию связи СCOС, и таким образом каждая ячейка АРП может взаимодействовать с одним из 8 возможных сдвиговых регистров. ПСЯ обеспечен идентичностью правильного сдвигового регистра в отношении каждого виртуального тракта. Блоки 1020, 1022,...,1024 совместной работы (БСР) (фиг.12) УСУ обеспечены также адресами места назначения виртуальных трактов. ЦК БАРП обеспечивает управление работой БАРП. Сообщения о предстоящих операциях самого ЦК БАРП, как, например, инициализация ЦК БАРП, он принимает по специализированной шине управляющих команд, прежде чем они поступят в пространственный коммутатор.
БАРП управляется посредством КМ в предпочтительном варианте выполнения. Альтернативно БАРП может управляться от ОШП. В этом случае контроллер БАРП принимает управляющие команды/сигналы от контроллера общей широкополосной платформы. БАРП обеспечивает службу сообщения от КМ к КМ и от КМ к МО на базе информационных сообщений для коммутатора 5ESS через пакеты промежуточного процессора.
3.3 Совместная работа сообщений
БАРП обеспечивает службу сообщений на базе информационных сообщений для коммутатора 5ESS следующего вида:
от КМ к КМ и от КМ к МО через пакеты промежуточного процессора,
перенос пакета части передачи сообщения (ЧПС) СС7.
Обе эти функции выполняются аналогичным образом. На фиг.8 устройство сообщений по уровням (УСУ) принимает сообщения от КМ через пространственный коммутатор. Коммутатор 5ESS переменной длины и сообщения СС7 переносятся в каналы временных интервалов, которые исходят от блоков управления протоколом (БУП) в блоке коммутации пакетов (БКП) или от манипулятора сообщений КМ. УСУ содержит три типа блоков совместной работы (БСР): БСР, извещающий коммутатор 5ESS, БСР для СС7, функция которого состоит в восстановлении сообщений от ПКМ, БСР межсоединенного БКП для обработки сообщений данных от пользователя к пользователю. Функция этих блоков состоит в следующем:
принимать сообщения, поступающие от пространственного коммутатора;
взаимодействовать с виртуальным трактом, который присоединен к месту назначения, идентифицированному в заголовке сообщения;
выполнять сегментацию или комплектование АРП;
сдвигать данные, когда поступила команда об этом от ПСЯ.
Обработка СС7 немного иная, чем сообщений промежуточного процессора коммутатора 5ESS. Для сообщений промежуточного процессора коммутатора 5ESS блок данных передается по виртуальному тракту до места назначения МО или КМ. Сообщения обрабатываются с целью считывания адреса места назначения. Адрес места назначения определяет, какой виртуальный канал БАРП используется для сегментации в отношении ячеек.
Для сообщений СС7 тракт данных сигнализации является терминалом в БСР СС7, и сообщения ЧПС передаются по виртуальному каналу до междугородной станции места назначения. Обработка основанных на ячейке сообщений, поступающих от сети АРП, и общее управление и устойчивость к сбою описываются подробно в разделе 4.
Для сообщений межсоединенного БКП сообщения обрабатываются с целью считывания адреса БКП места назначения; этот адрес места назначения определяет, какой виртуальный канал БАРП используется для сегментации в ячейках.
3.4 Дистанционное удаление друг от друга КМ/БАРП через СЦИ/СCOС
В этом варианте выполнения ОШП и БАРП соединены через внутристанционные линии связи СЦИ/СCOС (синхронная цифровая иерархия/синхронная сеть оптической связи), которые переносят АРП. КМ с БАРП не является элементом сети, как показано в сетях СЦИ или СCOС, и не завершает воздушную линию секции канала цифровой связи (КЦС). Однако внутристанционная линия связи является оптической, так что КМ с БАРП могут быть дистанционно удалены от ОШП. Если КМ с БАРП соединяются непосредственно с ОШП, тогда требуются только оптические волокна для такого дистанционного удаления (и где уместно - повторители).
В случае, когда КМ с БАРП дистанционно удалены через общую сеть СЦИ/СCOС, тогда СЦИ/СCOС мультиплексирует или перекрестно соединяет это опорное синхронное временное уплотнение-1 (СВУ-1) и мультиплексированные СВУ-1 используются, чтобы правильно окончить секцию КЦС на конце КМ. В этом общем случае линии связи СCOС/СЦИ на конце КМ должны оканчиваться мультиплексором СCOС/СЦИ для образования внутристанционной линии связи СCOС/СЦИ непосредственно для БАРП. Это сделает ненужным создание функций операций, организации и поддержки (ООП) СЦИ/СCOС с КЦС в КМ и устраняет возможную путаницу из-за наличия и ПСПБ, и КМ, выполняющих обработку ООП СCOС/СЦИ на одной и той же станции.
Вышеприведенное изложение применяется только к трактам, соединяющим КМ с ОШП (предполагается, что БАРП является частью КМ). ОШП завершает секцию КЦС для межстанционных соединительных линий и рассматривается сетью СЦИ/СCOС как элемент общей сети. Таким образом, благодаря возможностям ОШП коммутатор 5ESS (т.е. МО, группа КМ, их взаимосвязанных БАРП и ОШП) является элементом сети СЦИ/СCOС, даже если сам КМ им не является.
Альтернативно можно соединить группу БАРП напрямую с ОШП вместо прямого соединения с КМ. В этом случае тракты УСС, соединяющие КМ с БАРП, длиннее, чем в хорошо известных оптически дистанционно удаленных КМ в отношении коммутатора 5ESS. В другом случае линия связи СCOС может использоваться для передачи сигналов АРП на ОШП по существу тем же самым путем, как сигналы удаленного АРП посылаются на него, или, если ОШП выполнена соответствующим образом, сигналы АРП могут непосредственно передаваться от БАРП на ОШП.
3.5 Общие функции БАРП
В этом разделе обобщено функциональное отношение БАРП к ОШП и КМ. БАРП трактуется соединенным (и) КМ как интеллектуальный периферийный блок, который принимает управляющие сообщения от ПКМ таким же путем, как это делают остальные интеллектуальные устройства. Цель БАРП состоит в обеспечении следующих функций.
1. Временного интервала КМ для преобразования составной ячейки АРП, предполагая фиксированные, обеспеченные виртуальные каналы. Примерно до 10000 временных интервалов (20 трактов УСС) обслуживается при использовании настоящей техники. (Тракт УСС передает потоки бит 512 мультиплексированных DSO и использует передачу по оптическим волокнам). БАРП может направлять любой поступающий временной интервал в положение любого байта любого присоединенного активного виртуального канала с ПСПБ. Активные виртуальные каналы с ПСПБ являются правильной подгруппой большого числа предварительно предусмотренных виртуальных каналов, большинство которых не является активным в любой момент времени.
2. Сообщения переменной длительности промежуточного КМ и КМ на МО и/или СС7 на АРП о преобразовании виртуального канала ячейки, используя фиксированные обеспеченные каналы с ИСПБ. По причине высокого приоритета сообщений СС7 необходимо предварительно распределить ширину полосы частот ИСПБ для сигнальных каналов СС7. БАРП транспортирует блоки данных процедуры доступа тракта (тип) В (ПДТВ) промежуточного КМ без завершения протокола ПДТВ. Для СС7 БАРП заканчивает уровень 2 СС7, БАРП заканчивает уровень 2 СС7 (часть протокола HDLC) и передает сообщения ЧПС/ЧСУС (часть передачи сообщения/часть соединения и управления сигнализации). Протокол ЧПС не заканчивается в БАРП.
3. Подключение линии связи СЦИ/СCOС к ОШП обеспечивается для ячеек с виртуальными трактами. Скорости составляют от ССВ-З (синхронный сигнал времени) до ССВ-12 и от ССВ-1 до ССВ-4 для СCOС и СЦИ соответственно, и предусмотрено достаточное количество этих аппаратных средств, чтобы удовлетворить потребности выходных составных ячеек для КМ, обслуживающего до 10000 соединительных линий телефонной связи. Для большего или меньшего числа соединительных линий может быть предусмотрено соответственно больше или меньше этих средств.
4. Обработка бит A-G УСС (бит, которые посылаются с каждой выборкой ИКМ от КМ на ОШП), которая как можно наиболее прозрачная для КМ, включая функции E-бит (контроль временных интервалов). Четность временных интервалов по УСС также оканчивается/генерируется.
5. Вмешательство центрального процессора (ВПО) для содействия.
Это функция, которая посылает специальные биты по тракту УСС, которые будут устанавливать в исходное положение процессор КМ в случае, когда процессор утрачивает готовность к работе.
6. Обслуживание входов от множества КМ.
7. Обслуживание нагрузки сообщения промежуточного БКП от пользователя к пользователю.
4. Компоненты БАРП
В этом разделе описываются структуры индивидуальных блоков БАРП и схема дублирования для обеспечения высокой надежности:
пространственный коммутатор 610,
широкий буфер 620 ячеек,
процессор 630 списка ячеек,
блок 1022 совместной работы СС7,
блок 1020 совместной работы сообщений промежуточного КМ/МО
центральный контроллер 600 БАРП (ЦК БАРП).
Первые три блока БАРП, перечисленные выше, включают в себя DSO для преобразования составной ячейки. Следующие два блока включают в себя сообщения переменной длины для преобразования ячейки АРП. В описании архитектуры СС7 и БСР внутреннего коммутатора считаются частью устройства сообщений по уровням.
После раздела с описанием ЦК БАРП описываются альтернативные варианты вмешательства процессора ОШП БАРП (с кодовой модуляцией-АРП).
4.1 Пространственный коммутатор
4.1.1 Функции
Пространственный коммутатор соединяет DSO тракта УСС от временной ступени коммутации контроллера модуля (ВСККМ) КМ с DSO шины УСС до широкого буфера ячеек (ШБЯ) и устройства сообщений по уровням (УСУ) АРП. Количество шин УСС в отношении ШБЯ зависит от того, какие составные ячейки используются: либо 46, либо 48, что зависит от того, посылает ли ячейка ПСПБ АРП 46 или 48 сигналов DSO. Также есть одна шина УСС для УСУ. Условно шины УСС на "стороне ВСККМ КМ" называются соединительными трактами, тогда как шины на "стороне ШБЯ" называются шинами УСС. В любом случае может обслуживаться от 2 до 20 трактов УСС (т.е. до 10000 соединительных линий) (или больше в следующем поколении КМ) пространственным коммутатором. Внутренняя структура пространственного коммутатора показана на фиг.9. Структура является стержнем монтажной схемы и состоит из мультиплексоров, которые принимают до 20 трактов УСС. Эти мультиплексоры имеют управляющую память, которая выбирает один из 20 трактов УСС для каждого из 512 местоположений на тракте УСС. Выбранный временной интервал тракта УСС является в этом случае выходом мультиплексора для данного периода временного интервала. Количество мультиплексоров равно числу байтов в составной ячейке (т.е. 46 или 48 мультиплексоров) плюс один дополнительный мультиплексор для образования шины УСС для УСУ. Таким образом, всего будет 47 или 49 мультиплексоров во всей системе в зависимости от выбранной составной ячейки. Таким образом, любой из 512 временных интервалов по любому соединительному тракту УСС может соединяться с любым местоположением байта в широком буфере ячеек или УСУ.
Соединительные тракты УСС от ВСККМ оканчиваются на интерфейсах трактов УСС (ИТУ). ИТУ представляют собой синхронизированный набор объединительных шин для мультиплексоров пространственного коммутатора, так что все мультиплексоры коммутируются синхронно. Мультиплексоры в этом случае представляют собой группу синхронизированных шин для ШБЯ и УСУ.
В обратном направлении (т.е. от ШБЯ к ВСККМ КМ) пространственный коммутатор функционирует точно таким же образом. Байты от ШБЯ оканчиваются на мультиплексорах структуры, возбуждаемых управляющими памятями. Выход этих мультиплексоров соединяется с ИТУ, которые затем соединяются с аппаратным оборудованием ВСККМ КМ.
4.1.2 Устойчивость к сбоям
Основную структуру пространственного коммутатора осуществляет интерфейс с трактами УСС через карты ИТУ. Тракты УСС дуплексные, что означает, что они исходят с каждой стороны ВСККМ КМ. Для соединения с ВСККМ КМ сами ИТУ удвоены. ИТУ являются частью группы сбоя основной структуры, так что каждая сторона ИТУ соединяется с одной стороной структуры мультиплексоров. ИТУ соединяются с обеими сторонами ВСК КМ, но примыкают только к одной стороне пространственной структуры. Таким образом, любая сторона пространственной структуры может соединяться с любой стороной ВСК КМ. Карты структуры мультиплексоров присоединяются непосредственно к ШБЯ. ИТУ, структура мультиплексоров и ШБЯ все находятся на одной и той же стороне сбоя. Как показано ниже, процессор списка ячеек также находится в той же группе сбоя. С точки зрения перспективы системы, перекрестно соединенные тракты УСС оканчиваются на обеих сторонах БАРП, каждая из которых имеет пространственный коммутатор плюс взаимосвязанные аппаратные средства для образования ячеек АРП.
Шины УСС соединяются через пространственный коммутатор с УСУ. УСУ перекрестно соединено с пространственным коммутатором и находится в своей собственной группе сбоя.
Пространственный коммутатор (с ИТУ) использует следующие способы обнаружения ошибки:
четность по временным интервалам УСС,
четность по управляющим памятям,
четность по управляющим шинам от ЦК БАРП,
потеря такта и синхронизации.
Ошибки от этих детекторов направляются в ЦК БАРП, который затем выполняет процедуры управления сбоем.
4.1.3 Управление пространственного коммутатора
Управляющие памяти в мультиплексорах, а также другие управляющие регистры, используемые для выбора активных трактов УСС и сторон БАРП, все управляются центральным контроллером БАРП. Аппаратные средства пространственного коммутатора не имеют микропрограммного обеспечения или программного обеспечения; все управление осуществляется через шины от ЦК БАРП.
Имеется два операционных использования пространственного коммутатора, которые оба требуют записи в памятях пространственного коммутатора со стороны ЦК БАРП, а именно коммутирование цепи вызова и обеспечение сообщения о DSO из источников сообщения в КМ для УСУ. Для коммутирования канала вызова, когда вызов установлен, сигналы для одного DSO должны быть соединены с местоположением байта виртуального тракта в широком буфере ячеек. ПКМ (совместно с МО) определяет местоположение байта виртуального тракта, чтобы использовать для каждого сигнала DSO. ПКМ принуждает каждый сигнал DSO помещаться во временной интервал тракта УСС, используя секцию ВСК ВСККМ, и затем дает команду ЦК БАРП записать в соответствующую память мультиплексора маршрут этого сигнала DSO до правильного местоположения байта ШБЯ. Аппаратные средства широкого буфера ячеек затем переводят сигнал DSO в правильную ячейку виртуального тракта в памяти.
ПКМ обеспечивает каналы DSO в целях транспортирования сообщений от манипулятора сообщений или БКП через секцию ВСККМ пространственному коммутатору. Затем ПКМ выдает команду ЦК БАРП записать соответствующее положение мультиплексора, которое определяет маршрут канала (ов) DSO до УСУ.
В вышеприведенном описании в резервные пространственные коммутаторы записывается идентичная информация.
4.2 Широкий буфер (620) ячеек (фиг. 10)
4.2.1 Функции
4.2.1.1 Общие положения
Одним из двух выходных адресатов информации пространственного коммутатора является ШБЯ 620 (фиг.10). Ширина ШБЯ определяется типом выбранной составной ячейки (т. е. или 46, или 48 байтов ширины). Каждое местоположение байта в ШБЯ имеет управляющую память, именуемую присвоением временного интервала (ПВИ), которая загружает байт виртуального тракта для каждого принятого временного интервала УСС (фиг.10). ПВИ может также быть запрограммировано, чтобы не принимать данный временной интервал по шине УСС. Таким образом, каждое местоположение в широком буфере ячеек, на базе каждого интервала УСС, может загружать разные (или идентично те же) составные ячейки виртуальных трактов. (Последовательные сигналы тракта УСС, показанные на фиг.10, преобразуются в байты перед загрузкой в буфер 801).
Разгрузка ШБЯ в сторону ОШП управляется процессором 630 списка ячеек (ПСЯ). ПСЯ синхронно производит запросы в отношении ШБЯ путем посылки адреса и считанного запроса. Вся ячейка емкостью 48/46 байтов считывается за один цикл из одной памяти в сдвиговый регистр. В то же время ПСЯ загружает заголовок ячейки в сдвиговый регистр. Сдвиговый регистр сдвигается на блок 661,.. . , 662 обработки линии (БОЛ) линии связи СЦИ/СCOС. Операции считывания ПСЯ сдвиговых регистров перемежаются с управляемыми ПВИ записями от трактов УСС.
В обратном направлении (от ОШП к ВСККМ КМ) заголовок ячейки разгружается из сдвигового регистра в ПСЯ. ПСЯ использует заголовок для определения местоположения ШБЯ для вызова. Затем ШБЯ загружается из сдвигового регистра в буфер. Наконец, управляющие памяти ПВИ в буфере считывают байты по шинам УСС в соответствующее время.
Глубина ШБЯ до настоящего момента описывалась как равная общему числу (активных) виртуальных трактов из расчета один DSO на виртуальный тракт (может загружаться в память в каждом направлении). Однако буфер должен иметь глубину в два или три раза больше (в зависимости от направления) по следующим причинам:
основная природа АРП в том, что дрожание ячеек может произойти из-за хаотичной внутренней очередности в ОШП;
загрузка и разгрузка ШБЯ из сдвиговых регистров должны быть синхронизированы со считываниями и записями ПСЯ в/из сдвиговых регистров, чтобы избежать ячеек, которые посылаются как имеющие DSO из разных 125 мкс интервалов УСС. Такое несоответствие интервалов может прервать непрерывность услуг N * DSO, транспортируемых составной ячейкой.
Для решения этой проблемы в направлении от ВСККМ КМ к ОШП ШБЯ имеет двойную глубину (две секции). Это означает, что пространственный коммутатор загружает одну половину ШБЯ в то время, когда ПСЯ считывает из другой половины. После того как одна секция считана, ПСЯ и пространственный коммутатор приступают к другой секции. Каждая половина (секция) идентична по составу (т. е. имеет идентичное число обслуживаемых составных ячеек с виртуальными каналами). В направлении от ОШП к ВСК КМ, ШБЯ имеет тройную глубину (три секции), чтобы дать возможность 125 мкс "сформироваться". Термин сформироваться, как используется в настоящем описании, означает удерживание ШБЯ от состояния "неполной работы" и увеличение до 125 мкс фиксированной задержки. Неполная работа происходит в случае, когда дрожание ячейки доходит до такой степени, что новых DSO не существует в ШБЯ, когда временной интервал шины УСС должен считывать это местоположение. Таким образом, две из "секций" ШБЯ обеспечивают буферизацию с учетом дрожания и третья секция учитывает время для считывания DSО из ШБЯ без помех от записей ячейки из-за поступающих ячеек. Управляющие памяти в ПВИ ШБЯ автоматически проводят цикл через буферные секции ШБЯ. ПСЯ определяет, в какой секции поступающая ячейка от ОШП должна быть записана. Секция изменяется от одного виртуального канала к другому в силу того факта, что дрожание может вызвать (например) ни одной (т.е. ) ноль, одну или две ячейки в данный 125 мкс интервал. Если ячейки утрачены, тогда тройной буфер ШБЯ может поглотить их (фактически неполная работа). Это детектируется, если пространственный коммутатор и ПСЯ подключаются к одной и той же секции, и принуждает ПСЯ считывать из секции, которая является самой поздней по времени от текущей сформированной секции.
4.2.1.2 Контроль/тест тракта DSO
Контрольная схема предусмотрена для определения, что составные ячейки принимаются БАРП в среднем каждые 125 мкс. Для достижения этого ПСЯ обслуживает счетчик для каждого виртуального канала составной ячейки, который является активным. Каждый раз, как прибывает ячейка, счетчик увеличивает счет. Счетчик увеличивает счет в среднем каждые 125 мкс. Счетчик не может не увеличивать счет точно каждые 125 мкс по причине дрожания ячеек АРП в результате хаотичной очередности в ОШП. Это дрожание является фундаментальным аспектом ОШП. ПСЯ определяет каждые 10 мс, произвел ли счетчик увеличение отсчета на 80. Это имеет изменение плюс или минус 3 по причине близкого по сроку дрожания и очень низкой вероятности потери и вставления ячейки. Если счетчик увеличивает счет больше этой величины, извещается ЦК БАРП, который в состоянии считывать счетчик для определения, произошла ли потеря виртуального тракта. Счетчик может достигнуть счета 8000 плюс или минус 4. Счетчик в этом случае проверяется по истечении одной секунды для определения, достиг ли он величины 8000 плюс или минус 4. Величина счета 8000 используется для определения, произошла ли высокая потеря ячеек в секунду.
Прямой тест непрерывности цепи происходит в БАРП. Устройства памяти ШБЯ БАРП в источнике (в направлении сети АРП) вводят код (возможно многобайтовый) в местоположение байта в ячейке. Это происходит до того, как будет присоединен разговорный канал. В конце соединения места назначения устройства широкой памяти ячеек считывают образец и определяют совпадение. Этот байтовый код может быть изменен как часть теста, чтобы побудить биты в DSO периодически переключаться из одного состояния в другое. Это периодическое переключение может быть затем распознано в ШБЯ БАРП и сообщено на ЦК БАРП. Тогда ЦК БАРП может принудить E-биты (биты непрерывности тракта/канала, которые являются внутренними для коммутатора 5ESS и не передаются по линиям связи промежуточного коммутатора) по соединительному тракту УСС, который транспортирует сигнал DSO к периодическому переключению, а также посылать сообщения на ПКМ с указанием, что непрерывность установлена. (Использование E-бит описано в патенте США 4280217, выданном на имя E.H.Hafer et al.).
4.2.2 Устойчивость к сбою
ШБЯ находится в той же группе сбоя, что и пространственный коммутатор, как описано выше, так что сбои в широком буфере ячеек отражаются на стороне коммутатора ШБЯ, пространственного коммутатора и ПСЯ и УСУ. БОЛ перекрестно соединены со сдвиговыми регистрами линии связи (СРЛС) и ШБЯ. Таким образом, ШБЯ может принимать ячейки от любого из удвоенных БОЛ. Который из двух БОЛ будет использоваться - решает ЦК БАРП.
Основной способ детектирования ошибки в ШБЯ составляет четность среди:
шин УСС от пространственного коммутатора,
байтовых памятей виртуальных трактов,
управляющих памятей ПВИ,
управляющих шин от ЦК БАРП.
4.2.3 Управление
ШБЯ управляется с помощью ЦК БАРП. В аппаратных средствах ШБЯ нет средств микропрограммирования или программирования.
С операционной точки зрения ШБЯ используется для преобразования данных о местоположении байта в данной составной ячейке в определенный виртуальный тракт. ПКМ маршрутизирует канал DSO через ВСККМ КМ и затем принуждает ЦК БАРП соединить DSO через пространственный коммутатор с местоположением данного байта по ШБЯ. Управляющая память в ШБЯ для этого байта производит запись адреса, связанного с виртуальным трактом. Это происходит в управляющих памятях ПВИ для обоих направлений. В этот момент времени существует соединение от DSO ВСККМ КМ и данного составного байта (DSO) по данному виртуальному тракту.
Все остальные функции также управляются ЦК БАРП, включая управление детектированием ошибки, связанным с контролем и тестом непрерывности DSO и управлением состояния БОЛ.
4.3 Процессор списка ячеек (фиг.11)
4.3.1 Функции
4.3.1.1 Общие положения
ПСЯ 630 (фиг.11) отвечает за перемещение ячеек между ШБЯ 620 и сдвиговыми регистрами 651,...,652 линии связи (СРЛС) (фиг.8). В направлении сети АРП ПСЯ имеет соединенный трактом список записей, которые содержат местоположение ШБЯ в отношении каждого активного виртуального тракта. Каждые 125 мкс ПСЯ просматривает этот список и принуждает ШБЯ загружать всю активную ячейку в СРЛС. В другом направлении ПСЯ осуществляет функцию поиска адреса, которая используется для загрузки ШБЯ ячейками, поступающими от СРЛС. Как указано в описании ШБЯ, ПСЯ поддерживает маршрут секции ШБЯ доступным для передачи сигналов в обоих направлениях.
СРЛС соединен с блоком (661,...,662) обработки линии (БОЛ) средств связи, который является фактическим аппаратным средством (монтажной платой), которое преобразует биты для передачи на физический носитель и которое выполняет операции, связанные с функциями обслуживания. Таким образом, плата БОЛ обслуживает оптику, синхронизацию и схему обработки воздушной линии СЦИ/СCOС, как четность чередующихся байтов, и т.д.
На фиг. 11 показана внутренняя структура ПСЯ. Указатель 920 следования считывает биты запроса обслуживания от СРЛС. Биты запроса могут быть недопущены, если СРЛС не соединен с оборудованным или иначе подготовленным БОЛ обслуживания входных сигналов. Указатель следования реагирует на бит запроса обслуживания в отношении данного СРЛС путем проверки списка активных виртуальных трактов, которые обеспечены для средств связи, взаимодействующих с СРЛС. Список, загруженный в память 930 списка виртуальных трактов, просматриваемый указателем следования, начинается в начале каждого 125 мкс интервала и должен оканчиваться прежде, чем начнется следующий интервал 125 мкс. Последнее требование является отражением факта, что ширина полосы частот, предложенная средствами связи, не должна быть больше, чем мощность средств связи в отношении обслуживания с постоянной скоростью передачи бит, такого как речевые сигналы. Каждый раз, когда сделан запрос об обслуживании, указатель следования считывает вход ячейки виртуального тракта из списка, загружает СРЛС информацией заголовка, которая загружена во вход списка, и принуждает ШБЯ загружать 48/46 байтов в СРЛС. В случае 46-байтовой составной ячейки двухбайтовый индекс считается частью заголовка и загружается ПСЯ с регулярным (например, ИСПБ) 5-байтовым заголовком.
Активные виртуальные тракты делают неактивными путем удаления входов из списка активных виртуальных трактов, связанных с СРЛС. ЦК БАРП содержит буфер 921, являющийся общим и для указателя следования, который (буфер) использует указатель следования для добавления и удаления входов из активных списков в свободное время, когда ячейки передаются из СРЛС.
Вышеприведенное было описано последовательно. Однако в действительности существует значительное взаимное наложение друг на друга операций. Например, проверка бит запроса СРЛС перекрывается с выборкой ранее проверенных запросов СРЛС, а также с отправкой считанных команд на ШБЯ.
В направлении к КМ (от сети АРП) ячейки синхронизируются в СРЛС от БОЛ и устанавливаются биты запроса. ПСЯ обслуживает эти биты сначала путем преобразования адреса виртуального тракта в заголовке составной ячейки относительно местоположения ШБЯ. Эта функция выполняется преобразователем 940 адреса АРП (ПАА) в указателе следования, который переводит адрес заголовка АРП в физический адрес в устройствах памяти ОШП. ПАА также использует индекс, связанный с СРЛС, так что одни и те же заголовки ячеек АРП могут использоваться на разных линиях связи, в противном случае заголовки должны быть разными на всех линиях связи. Затем указатель следования загружает ячейку в СРЛС в местоположение ШБЯ. Все СРЛС находятся на параллельной к ШБЯ шине, так что только один может быть загружен за один раз в ШБЯ. В предпочтительном варианте выполнения ПАА выполнен с возможностью использования ассоциативной памяти (АП).
Конструкция указателя 920 следования основана на использовании быстродействующей логики (программируемой логики), которая работает на частоте свыше 100 МГц и сканирует биты запроса в сдвиговых регистрах, приводя в действие АП, считывает присоединенный список, стробирует данные между ШБЯ и сдвиговыми регистрами и отсчитывает поступление ячеек. Примеры такой логики представляет собой семейство логических схем ПМЛ (программируемая матричная логика) производства AMD, в которых используются такие компоненты, как устройство 22V10, производимое многими изготовителями. Другим компонентом является PLC14 фирмы Signetics. Выпускаются другие стробирующие устройства, например, фирмой Texas Instruments, которые также могут работать на частоте 100 МГц плюс.
4.3.1.2 Функция теста перегрузки АРП
Одна из функций БАРП состоит в способности определять, будет или нет виртуальный тракт составной ячейки, который надлежит установить в активное состояние, испытывать перегрузку, и тем самым предотвратить такую перегрузку. Перегрузка определяется как имеющая место, если использование тракта увеличивает ее выше некоторого порога вдоль любого отрезка.
Альтернативно, когда происходит перегрузка, ячейки маркируются одним или большим числом ОШП вдоль тракта. Концепция маркирования использует управляющие биты перегрузки в заголовке АРП, чтобы испытать занятость соединительных трактов между источником и местом назначения. Когда занятость выше порога, ОШП (и другая промежуточная ОШП) будет маркировать ячейку. БАРП должен отметить это и сообщить результат на ЦК БАРП, который затем сообщает результат на КМ. Для обеспечения статической индикации все ячейки должны быть маркированными за период заданного числа поступления ячеек. После приема ячейки от СРЛС, который имеет установленные биты запросов, ПСЯ будет передавать управляющие биты перегрузки и идентификатор виртуального тракта в память, доступную для ЦК БАРП. БАРП считывает эту память и сообщает результат на ПКМ. Если происходит перегрузка, новые ПВК С ПСПБ не возбуждаются, если они используют перегруженный тракт, и объединение ПВК (фиг.17) ускоряется.
Диагностика для испытания механизма детектирования этой маркировки состоит в следующем: ПСЯ управляется от ЦК БАРП, чтобы установить биты перегрузки на тракте, который известен как не перегруженный. Нижние ОШП не будут уже влиять на установленные биты, так что дальний конец БАРП будет детектировать установленные биты. Затем ЦК БАРП дает команду, какие биты должны быть стерты. Принимающий БАРП должен детектировать, что биты стерты. Такой тест может использоваться для проверки схемы детектирования маркированных ячеек АРП и способности сети транспортировать эти биты после их маркирования.
Точное использование бит перегрузки не определяется средством МККТТ. В описываемой здесь монтажной схеме эти биты используются для проверки ширины полосы частот способом, аналогичным алгоритму маркировки конверта, используемого в реле конверта. Этот алгоритм устраняет маркированные конверты, если перегрузка существует. Однако ячейки АРП не устраняются, так как порог маркировки ниже возможности канала.
4.3.2 Устойчивость к сбою
ПСЯ является частью той же группы сбоя, что и пространственный коммутатор и ШБЯ. Сбой в ПСЯ вызывает боковую коммутацию БАРП, управляемую ЦК БАРП.
Четность используется во всем списке и памятях, возбуждаемых указателем следования. Также используются дополнительные аппаратные средства, как таймер, который проверяет рабочую готовность и условия простоя. Возбуждаемая памятью программа указателя следования загружается посредством ЦК БАРП как часть установления в исходное состояние ПСЯ.
4.3.3 Управление
ПСЯ управляется посредством ЦК БАРП. На ПСЯ есть регистры, которые побуждают ПСЯ модифицировать информацию в таблице присоединенного списка и/или преобразователе адреса АРП (ПАА). Фактически ПСЯ просто записывает данные ЦК БАРП непосредственно в эти блоки памяти, когда этот процесс синхронизирован с другими процессами ПСЯ. Биты запроса СРЛС запрещаются регистрами, доступными непосредственно для ЦК БАРП. Другие сообщения, как информация о маркированных ячейках или управление маркировкой ячеек, обрабатываются через регистры 921, совместно используемыми ПСЯ и ЦК БАРП. Любая сложная обработка, которая не должна быть произведена на основе последовательной обработки ячеек, выполняется ЦК БАРП.
При эксплуатации после того, как ПКМ соединит DSO через данную секцию ВСККМ КМ по соединительному тракту УСС и побудит центральный контроллер БАРП (ЦК БАРП) соединить DSO через пространственный коммутатор в память правильного виртуального тракта в ШБЯ во время активизации виртуального тракта, ЦК БАРП побудит добавить адрес виртуального тракта в список активных ячеек, связанных с линией связи (СРЛС) виртуального тракта. В этот момент времени составные ячейки переданы на сеть АРП и существует непрерывность DSO (на этом конце). Затем ЦК БАРП выполняет различные действия, упомянутые выше в отношении испытания и контроля непрерывности DSO.
4.4 Устройство сообщений по уровням (УСУ) (фиг.12)
4.4.1 Функции УСУ
Устройство сообщений по уровням (УСУ) АРП (фиг.12) обеспечивает сообщением переменной длины в отношении преобразования АРП для коммутатора 5ESS для следующих трех систем связи:
связь КМ с КМ и КМ с МО,
сеть СС7: для связи КМ с КМ в междугородной сети,
для связи пакета межсоединенного БКП.
В результате создания этих служб межсетевого обмена сеть АРП может использоваться для транспортировки сообщений, тем самым упрощая обмен сообщениями между КМ в пределах коммутатора 5ESS и/или устраняя использование ТПС для сообщений между коммутаторами в междугородной сети связи. ТПС, используемые в окружении локальных несущих частот в отношении междугородной телефонной сети и ее несущей частоты, не подвергаются воздействию в результате этого использования АРП. Однако сокращение ТПС ведет к экономии операционных затрат и расходов на аппаратные средства.
Далее, в соответствии с представленными в описании техническими решениями в предпочтительном варианте выполнения коммутатор сообщений в коммутаторе 5ESS (описан, например, в упомянутом АТ&Т Technical Journal, с. 1418-1421) исключается из коммутатора 5ESS и обеспечивается функция вмешательства процессора кодовой модуляции (ВПО), как описано ниже в разделе 4.6.
В УСУ содержатся блок (1020) совместной работы СС7 (БСР СС7) и блок (1022) совместной работы КМ (БСР внутреннего коммутатора) и блок (1024) совместной работы межсоединенного БКП, как показано на фиг.12. Шина УСС от пространственного коммутатора БАРП транспортирует один или более основанных на DSO каналов, которые содержат сообщения или КМ, или СС7 от манипулятора сообщений и/или от БКП к УСУ. Эта шина УСС дуплексная, имеющая источник в каждой дуплексной части пространственного коммутатора. В УСУ шина ответвляется (через объединительную плату) на СС7, КМ и межсоединенные БКП.
Выходы УСУ на стороне АРП составляют последовательные сдвиговые регистры, которые по существу параллельны со сдвиговыми регистрами ШБЯ. Это можно увидеть на фиг. 13, на которой показана блок-схема БСР. ПСЯ обслуживает запросы от УСУ и чередует основанные на сообщениях ячейки АРП с составными ячейками речевого сигнала. Отличие алгоритма чередования состоит в том, что составные ячейки передаются первыми (каждые 125 мкс) и затем передаются ячейки АРП, основанные на сообщениях. Интервал 125 мкс не должен перекрываться со следующим интервалом 125 мкс для составных ячеек. Основанные на АРП сообщения могут считаться всегда имеющими ширину полосы на линии связи; использование линий связи распределяется таким образом, что гарантирует условие, что ширина полосы частот для сообщений всегда доступна. Имитация и/или опыт эксплуатации необходимы для определения минимального адекватного резерва для посылки сообщений по линиям связи, для которых также транспортируются составные ячейки.
Во входном направлении от сети АРП ПСЯ переводит заголовки виртуальных трактов АРП, определяет, является ли ячейка виртуальным трактом, основанным на сообщении СС7, КМ и межсоединенного БКП, и направляет ячейки на один из правильных БСР в УСУ. БСР принимают ячейки и начинают перекомпоновку сообщений. Затем перекомпонованные сообщения передаются в DSO по шине УСС на пространственный коммутатор БАРП. БСР должны быть способны взаимодействовать с ячейкой от данного виртуального канала с данными DSO или набором DSO для N*DSO телефонов.
Альтернатива в отношении вышесказанного состоит в том, чтобы соединять КМ, СС7 и БСР межсоединенного БКП непосредственно с ОШП через линии связи СЦИ/СCOС. Однако это вызовет использование ограниченных линий связи по ОШП для телефонных нагрузок, которые составляют незначительную часть производственной мощности средств связи. По этой причине предпочтительна небольшая воздушная линия, содержащая тракт ПСЯ ячеек внутри линии. Кроме того, DSO должны мультиплексироваться снова в КМ коммутатора 5ESS, и шины и соединительные тракты УСС являются наиболее экономичным средством для выполнения этого.
Предполагается, что по крайней мере всегда имеется в наличии и в рабочей готовности один БСР КМ, так как он является лишь механизмом, посредством которого ПКМ должен сообщаться с МО или другими ПКМ. БСР СС7 создаются факультативно, так что они могут присутствовать и могут не присутствовать в зависимости от применения. Например, коммутаторы международных 5ESS, тракты СС7 часто группируются только в один КМ, и этот КМ может направлять всю нагрузку СС7 на один БАРП. Кроме того, структура УСУ обеспечивает переменное количество каналов передачи данных сигнальных сообщений (КДС) СС7. Это может привести к переменному количеству БСР для СС7, что зависит от числа КДС, которые БСР СС7 может обработать. Эта гибкость способствует особым применениям, таким, как глобальный КМ (ГКМ) международного коммутатора 5ESS (КМ, который имеет все соединительные тракты СС7). ГКМ, который имеет централизованный БКП СС7, имеющий возможность генерировать большое число индивидуальных КДС СС7 таким образом, что БАРП способен завершить большое количество КДС, может снизить влияние средств программирования на существующие коммутаторы 5ESS.
4.4.1.1 АРП и протоколы
В следующих двух разделах после этого описаны внутренний коммутатор, СС7 и БСР межсоединенного БКП с описанием их структур в УСУ. Однако сначала изложено взаимодействие АРП и протоколов внутреннего коммутатора и СС7 и их сравнение. Основная концепция АРП состоит в том, что АРП обеспечивает только службы уровня транспортировки сигналов. Чтобы вписаться в эту концепцию, БСР КМ передает только циклы внутреннего коммутатора. Он не выполняет обработку протоколов в обычном смысле коммутации пакета. Например, ретрансляция не обслуживается БСР КМ. Процессоры протоколов (т.е. блок управления протоколом БКП и/или манипулятор сообщений) обрабатывают протокол процедуры доступа тракта (тип) D (ПДТD) на концах линии связи по сети АРП. По существу БСР КМ идентифицирует местоназначения КМ в цикле протокола HDLC, группирует ячейки с правильными виртуальными трактами, которые соответствуют КМ места назначения, и затем передают ячейки в ОШП (сеть АРП).
Такая же монтажная схема используется для СС7. Сеть АРП передает пакеты ЧПС СС7 между процессорами для обработки сигналов СС7, которые находятся в разных коммутаторах сети. Реализация СС7 отличается единственной линией прямой связи (от точки к точке) (см. стандарт МККТТ (Q.703), которая обычно соединена с ТПС и которая здесь не используется. Однако сеть СС7 соединяет точку со многими точками на уровне ЧПС. Для рационализации уровня АРП с прямым соединением с использованием многоточечного соединения ЧПС, БАРП завершает уровень тракта сигнальных сообщений и взаимодействует с пакетами ЧПС с виртуальными трактами в отношении места назначения, которое соответствует "коду точки ЧПС". Сообщения группируются в ячейках и затем передаются по сети АРП. В месте назначения пакет ЧПС перегруппировывается и используется локальный объект уровня канала передачи данных сигнальных сообщений для отправки пакета СС7 обратно на манипулятор сообщений или блок управления протоколом БКП через DSO по шине УСС, которая соединяет пространственный коммутатор (как в БСР КМ). Это техническое решение помогает смягчить удар устранения ТПС на коммутаторе 5ESS или других коммутаторах, так как БАРП существенно компенсирует поведение ТПС (как видно из перспективы БКП/БУП) на уровне КДС.
4.4.2 БСР КМ
4.4.2.1 Функции
Функция БСР КМ состоит в содействии циклам ПДТD с помощью обеспеченных виртуальных каналов и затем в преобразовании циклов в ячейки. Как отмечено выше, БСР КМ не выполняет операций ПДТD по сообщениям внутреннего коммутатора. Однако бит-ориентированный протокол ПДТD сообщений внутреннего коммутатора должен обрабатываться для проверки целостности сообщения через контроль при помощи циклического избыточного кода (КЦИ) и, более важно, удалять бит переполнения из сообщения для возможности считывания адреса места назначения КМ. Только после обработки бит-ориентированного протокола (БОП) и удаления "бита переполнения" адрес места назначения КМ может быть считан.
Для выполнения сказанного выше БСР КМ принимает сообщения ПДТD промежуточного КМ по обеспеченному числу временных интервалов (например, 12 DSO или 768 кбит/с) по шине УСС от пространственного коммутатора БАРП в устройстве 1120 протокола HDLC (фиг.13) на БРС КМ. Устройство протокола HDLC загружает цикл внутреннего КМ в буфер, из которого адрес (и результат проверки КЦИ) могут быть считаны внутренним контроллером БСР КМ. Контроллер связывает адрес места назначения КМ с правильным виртуальным трактом. Затем цикл с заголовком ПДТD группируется в соответствии с уровнем адаптации АРП, описанным в стандарте МККТТ 1.363. Коротко эти операции включают в себя использование:
группы разрядов бит, которая указывает первый сегмент (т.е. ячейку), средний сегмент и последний сегмент сообщения,
КЦИ, который также указывает целостность всего послания,
поля длины, которое указывает число байтов в сообщении,
индекса, который объединяет все ячейки данного сообщения вместе.
В вышеприведенном перечне термин "сообщение" используется как синоним цикла ПДТD. Группирование ячеек достигается с помощью процессора с модифицированным прямым доступом к памяти, процессора уровня адаптации АРП (ПУАА), который генерирует ячейки, группы разрядов бит и т.д. Выход ПУАА соединен с БОЛ (СРЛС), который соединен с ПСЯ. На данный момент только один СРЛС (соединенный с дуплексными БОЛ) обслуживается каждым БСР, так как ширина полосы частот от одной линии связи далеко выходит за рамки того, что необходимо. Когда ячейка готова для передачи, будет осуществляться передача от СРЛС БСР на БОЛ с помощью аппаратных средств в ПСЯ. Не требуется широкий буфер ячеек в выходном направлении в силу относительно низких требований в отношении ширины полосы частот (по сравнению со случаем составного речевого сигнала).
В обратном направлении от сети АРП ПСЯ считывает заголовок АРП в СРЛС, который соединен с БОЛ. Этот СРЛС принимает ячейки для составной памяти (ШБЯ) и УСУ. При поступлении ячейки ПСЯ не "знает", являются ли эти ячейки основанными на сообщении или составными. ПСЯ использует свой преобразователь адреса АРП (ПАА) (так же, как это имеет место в отношении составного речевого сигнала) для определения, должна ли ячейка быть послана на БСР или на ШБЯ (составной речевой сигнал). В настоящем описании ячейки считаются основанными на сообщении и предназначаются для БСР. В противном случае ячейки будут загружаться в ШБЯ (составные ячейки). ПСЯ перемещает ячейки в БСР КМ или в буфер 1170 ячеек БСР СС7 (поясняется ниже) или в БСР межсоединенного БКП. (Этот буфер 1170 ячеек не является ОШП 620, используемым для составного речевого сигнала).
Поток сигнальных, управляющих и других узкополосных сообщений является примером данных, следующих от ОШП к КМ (противоположно направлению, показанному на фиг. 13). ПУАА БСР КМ (внутренний коммутатор) копирует циклы из своего буфера ячеек в очередности, которые существуют на основе сообщения. Многочисленные сегменты сообщения (ячейки) могут приниматься одновременно, так что идентификаторы в ячейках используются для разделения ячеек в полных сообщениях. После комплектования сообщения отправляются обратно на DSO по шине УСС через пространственный коммутатор в БАРП.
БСР КМ включает в себя буфер ячеек, потому что должна быть достаточная буферизация для возможности приема пачки ячеек, если происходит "связывание ячеек". Это означает, что "передний конец АРП" БСР должен быть в состоянии принимать пачки ячеек со скоростью линии связи для коротких периодов времени. Буфер 1170 ячеек имеет круговую организацию (стек обратного магазинного типа - FIFO) и содержит весь заголовок АРП плюс 48 байтов данных в противоположность ШБЯ для составных ячеек, который не содержит заголовка АРП. (В случае составных ячеек ПСЯ обрабатывает и удаляет заголовок АРП для составных ячеек, так как заголовок не служит для логической функции после того, как цикл уже в ШБЯ. В случае сообщения заголовок АРП обрабатывается далее для комплектования полного сообщения из ячеек АРП).
Одновременно исследования и/или опыт эксплуатации могут использоваться для определения оптимальной минимальной глубины локальной широкой буферизации ячеек. Обычно интенсивность нагрузки является минимальной по сравнению с пропускной способностью БСР КМ, так как БСР КМ обрабатывает только циклы для одного КМ и не производит обработки с целью фактического завершения протокола ПДТD, как его делают источники, блоки управления протоколом БКП или манипуляторы сообщений.
4.4.2.2 Устойчивость к сбою БСР КМ
БСР КМ резервируются на основе простого дублирования, так как только один комплект (плюс его дубликат) требуется в БАРП. Это связано с тем, что имеется только два канала внутренних КМ от манипулятора сообщений к другим КМ или МО.
Так как ширина полосы частот для каналов сигнализации внутренних КМ небольшая, соединительный тракт УСС, несущий такие каналы сигнальных сообщений, может обслуживаться одним БСР. ЦК БАРП определяет, какой БСР КМ является активным. Средство разветвления шины УСС УСУ создает перекрестное соединение между шинами УСС от пространственного коммутатора, так что любой БСР КМ может быть активным безотносительно к тому, какая сторона пространственного коммутатора является активной.
Сбои или ошибки детектируются проверками четности по шинам УСС от пространственного коммутатора, а также внутренними средствами проверки ошибок, обычно используемых с процессорами и контроллерами, как проверки четности на блоках памяти и таймерах рабочей готовности.
Отдельный тип функции устойчивости к сбою касается ухудшения транспортировки сообщений. Существует два типа: ухудшение АРП и ухудшение канала DSO манипулятора сообщений (МС). Ухудшение означает чрезмерные коэффициенты ошибок в ячейках или сообщениях. БСР КМ указывает условия ошибки сообщения ЦК БАРП, такие как нарушенные циклы от МС/БКП или дефектные сообщения от сети АРП, если они превышают определенный порог. Это детектируется либо в заголовке АРП, КЦИ-4, проверке КЦИ в цикле ПДТD от БУП БКП или МС, либо в КЦИ непосредственно в сообщении, как оно транспортируется в ориентированной на соединение сетевой службе (ОССС) АРП. В случае высокого коэффициента ошибок АРП ЦК БАРП может коммутировать БСР КМ на резервный БОЛ (т.е. коммутатор защиты линии связи) или предпринять действия для диагностирования аппаратных средств между БСР КМ и БОЛ (включая БСР КМ). В последнем случае боковой коммутатор БАРП или БСР КМ может быть в порядке в зависимости от соединения между УСУ и пространственным коммутатором.
4.4.2.3 Управление БСР КМ
ЦК БАРП сообщается с БСР КМ через управляющую выходную шину от ЦК БАРП со многими блоками БАРП. При работе ЦК БАРП обеспечивает адреса назначений виртуального тракта через эту шину и обеспечивает DSO через пространственный коммутатор в БСР. ЦК БАРП осуществляет это, как предписывает ПКМ. Обеспечение также производится в ПСЯ для загрузки ПАА с виртуальными трактами, которые транспортируют сообщения. После этого обеспечения сообщения промежуточного КМ/внутреннего коммутатора МО могут быть по желанию посланы ПКМ/МС без вмешательства ЦК БАРП на любое место назначения промежуточного КМ/внутреннего коммутатора МО.
4.4.3 БСР СС7
4.4.3.1 Функции
БСР СС7 аналогичен БСР КМ и занимает положение в УСУ, которое параллельно БСР КМ. Поэтому в этом разделе в основном описаны различия между БСР КМ и БСР СС7. Основные различия между БСР КМ и БСР СС7 следующие:
БСР СС7 завершает протокол соединительного тракта СС7, а БСР КМ только обрабатывает ПДТD в отношении уровня битов для возможности считывания адреса назначения КМ;
БСР СС7 монтируется факультативно, так что, как сказано выше, он может присутствовать и может не присутствовать в монтажной схеме. Кроме того, БСР СС7 дает возможность изменять число обслуживаемых каналов передачи данных сигнальных сообщений, чтобы дать возможность обслуживать глобальный КМ коммутатора 5ESS на одном БАРП.
Как сказано в разделе "АРП и протоколы", БСР СС7 завершает протокол тракта СС7 (КДС, уровень 2), как принятый от блока управления протоколом БКП или манипулятора сообщений по шине УСС, между пространственным коммутатором и УСУ. Затем БСР СС7 взаимодействует с виртуальным каналом посредством кода точки ЧПС, комплектует пакеты в ячейках и передает их на сеть АРП. В коммутаторе назначения ПСЯ маршрутизирует ячейки на БСР СС7, который затем комплектует их обратно в пакеты, вставляет их в цикл канала передачи данных сигнальных сообщений СС7 и посылает их обратно по шине УСС на пространственный коммутатор к блоку управления протоколом БКП или манипулятору сообщений. Сеть АРП используется только как транспортирующее средство пакетов ЧПС, как это имело место в отношении сообщений внутреннего коммутатора, обработанных БСР КМ.
Монтажные схемы БСР СС7 и БСР КМ практически идентичны. Сторона шины УСС обоих БСР основывается на протоколе HDLC, и контроллеры, которые обрабатывают бит-ориентированные протоколы (БОП) могут также обрабатывать протокол КДС СС7. Фирма АТ&Т выпускает набор контроллеров (2 устройства - АТТ 7115 и АТТ 7130), которые выполняют эту функцию для 32 каналов со всеми каналами при полном использовании для КДС СС7. Переднее окончание АРП и взаимодействие с ПСЯ также идентичны и их описание не требует здесь повторения. В основном используется код точки ЧПС вместо пункта назначения КМ для связи виртуальных адресов.
В одном альтернативном варианте выполнения БСР СС7 и КМ находятся на одном и том же БСР. Пропускная способность не представляет проблемы, так как только несколько DSO обслуживается на одной карте аппаратных средств. Исходя из размера шины УСС 512 временных интервалов и использования карт двойного размера, более чем 32 временных интервалов может обслуживаться в одной карте, делая привлекательным использование единственного БСР с точки зрения производственных затрат.
4.4.3.2 Устойчивость к сбою
БСР СС7 имеет схему устойчивости к сбоям, отличающуюся от БСР КМ. По причине использования переменного числа БСР СС7 в одном БАРП избыток БСР СС7 в УСУ составляет N+1 по сравнению с 1+1 в БСР КМ. В альтернативном варианте выполнения избыток составляет N + 2.
4.4.3.3 Управление
БСР СС7 имеет аналогичные управляющие выходы, как это имеет место в БСР КМ. ПКМ обеспечивает:
временные интервалы от манипулятора сообщений или блоков управления Протоколом БКП через пространственный коммутатор до БСР СС7,
карты распределения в БСР СС7, которые связывают коды точек с виртуальными трактами,
виртуальные тракты в ПСЯ.
4.4.4 БСР межсоединенного БКП
БСР межсоединенного БКП функционирует по существу таким же образом, как и БСР КМ за исключением того, что он коммутирует пакеты, посылаемые БКП 519, пакеты, которые в общем исходят от и оканчиваются пользователями. БСР является прозрачным в отношении используемого протокола уровня пользователя.
4.5 Управление БАРП
4.5.1 Функции
Соединительные тракты УСС соединяют БАРП с КМ. Поэтому тот же тип контроллера, который используется в блоке цифровой магистрали (БЦМ) или в блоке интерфейса СCOС (БИС) в БАРП.
ЦК БАРП функционирует и обслуживает аппаратные средства БАРП, как описано выше во всех разделах, и поэтому здесь не будет повторяться.
4.5.1.1 Устойчивость к сбою
ЦК БАРП резервируется как 1+1 и находится в отдельной группе сбоя от остальной части БАРП. Так как ЦК БАРП является модифицированным вариантом контроллера БИС/БЦМ, дальнейшего пояснения аспектов устойчивости к сбоям контроллера не требуется.
4.5.1.2 Управление
В коммутаторе 5ESS блок управления протоколом (манипулятор сообщений (МС) используется для интерфейса между ПКМ и ВСК; сообщения сигнализации и управления могут в этом случае передаваться между ВСК и УСУ БАРП. Этот манипулятор сообщений в коммутаторе 5ESS используется для соединения с ЦК БАРП. Эта связь осуществляется через временные интервалы, которые прибывают по соединительным трактам и которые несут основанные на ПДТD сообщения, исходящие от ПКМ. ЦК БАРП обрабатывает ПДТD и выполняет все поступающие команды. Некоторые специальные функции, как, например, установление процессора в исходное положение, вводятся в специальный временной интервал тракта УСС, используемый для передачи управляющих сообщений на ЦК БАРП, если готовность ЦК БАРП утрачена с любой стороной. Специальные биты в заранее определенном управляющем канале резервируются в тракте УСС для реализации этих функций.
Как сказано выше, БАРП может быть размещен в ОШП, и в этом случае ЦК БАРП управляется контроллером ОШП.
4.6 Вмешательство процессора ОШП (ВПО)
Ниже описывается возможность вмешательства ПКМ, которую МО использует для установления в исходное положение не готового к работе ПКМ. В текущем коммутаторе 5ESS МО управляет аппаратными средствами коммутации сообщения с битами от источника в управляющем временном интервале (УВИ) линии УСС. Так как цель этой монтажной схемы состоит в устранении коммутатора сообщений, функция его должна быть компенсирована некоторой комбинацией ОШП и БАРП. Эта функция реализуется следующим образом: специальные виртуальные каналы от МО до БАРП транспортируют ячейки с многобайтовыми сформированными данными. Они периодически посылаются на БАРП посредством МО через УУПА 1240 для выполнения ВПО. Аппаратные средства БАРП (сдвиговые регистры линии связи) способны детектировать условие и соединены с пространственным коммутатором, который затем генерирует комбинацию битов ВПО УВИ для установления КМ в исходное положение. Эти данные многобайтовой комбинации могут быть длинной псевдослучайной последовательностью, которая по существу имеет нулевую вероятность быть генерированной в ячейках, которые никогда не используются, за исключением установления в исходное положение специфического КМ. ОШП имеет эти виртуальные каналы между МО и индивидуальным КМ.
5. Платформа операций, организации, поддержки и обеспечения (ООПО) МО и ОШП
МО служит для обслуживания полностью коммутатора 5ESS и ОШП (включая БАРП) в соответствии с потребностями ООПО. Это включает в себя загрузку и управление ОШП, качественный графический дисплей и связь через АРП с КМ. На фиг.14 показана архитектура системы МО/ОШП, как содержащая следующие компоненты.
Модуль управления АРП (МУА), включающий непосредственно соединенный терминал. Это вспомогательный процессор устойчивости к сбоям, который является расширением существующего МО коммутатора 5ESS и служит и для обеспечения дополнительной обрабатывающей пропускной способности новых ОШП и БАРП.
Шину Ethernet для взаимного соединения МО/МУА с графическим интерфейсом пользователя (ГИП), устройством управления пакетом АРП (УУПА) и ОШП.
Периферийные устройства интерфейса малых вычислительных систем (интерфейс SCSI, промышленный стандарт) для оперативной документации на диске, магнитной ленте и ПЗУ на КД: они расширяют энергозависимые внешние устройства существующих МО.
Терминалы рабочей станции ГИП, которая обслуживает существующее коммутационное оборудование 5ESS, ОШП и БАРП.
Устройство управления пакетом АРП придает МО/МУА способность сообщаться через АРП по СCOС с КМ. КМ завершают АРП устройства управления пакетом АРП в их УСУ с интерфейсным блоком АРП. Для связи с КМ МО/МУА посылает сообщения по шине Ethernet на УУПА, которое обрабатывает сообщение в соответствии с преобразованием ячейки и передачей на ОШП по СCOС.
ГИП и энергонезависимая память являются компонентами, выпускаемыми промышленностью, управление которых основано на средствах программирования МУА. Структура компонентов МУА и УУПА пояснена в следующих разделах.
5.1 Модуль управления АРП
МУА является обрабатывающим элементом МО высокой производительности.
Процессоры: МУА процессоры представляют собой N+K избыточность, соединенные с помощью технологии Future Bus (+), стандарт IEEE 896. Автоматические аппаратные и программные средства для детектирования сбоев и средства восстановления функционирования встроены в модули процессоров. Сам МУА обслуживается модулем организации (МО), который используется для создания высоко надежного внешнего окружения для процессоров МУА.
Модули памяти: процессоры N+K совместно используют модули памяти, которые используются для загрузки статических и контрольных данных. Автоматические аппаратные средства для детектирования сбоя/ошибки встроены в модули памяти. Модули памяти предусмотрены по принципу резерва: одни и те же данные загружаются в два модуля памяти; только один активный модуль реагирует на доступы считывания. Модули памяти соединяются с процессорами по Future Bus(+).
Периферийный интерфейс интерфейса SCSI: имеется два контроллера интерфейса SCSI в платформе МО/ОШП. В дополнение к зеркальным дискам имеется кассетный накопитель на ленте для загрузки МУА, и ПЗУ на КД факультативно монтируется для загрузки неавтономной информации.
Приемопередатчики Ethernet: рабочие станции ОШП и ГИП соединяются через сдвоенные интерфейсы Ethernet МУА.
Выделенный терминал МУА: терминал непосредственно с комплексом процессоров для доступа к проводу в случае повреждения обоих контроллеров терминала или приемопередатчиков Ethernet. Этот терминал не имеет ГИП и предназначен только для команд языка человеко-машинного общения ЯЧМ.
5.2. УУПА
УУПА является модифицированным БСР от УСУ БАРП. Он показан на фиг.14. Адаптер скорости и контроллер БОП устранены и заменены приемопередатчиком и контроллером Ethernet. Контроллер Ethernet помещает сообщение в буфер. Процессор определяет правильный заголовок АРП (виртуальный канал). ПУАА выполняет функции преобразования сообщения в ячейки. В противоположность БСР УСУ буфер ячеек соединяется непосредственно с БОЛ, который преобразует биты в средства СCOС, как только сегменты являются доступными. Отсутствует ПСЯ для стробирования передачи ячейки на БОЛ.
6. Заключение
Вышеприведенное описание является только одним предпочтительным вариантом выполнения изобретения. Специалистами в этой области техники могут быть разработаны многочисленные другие монтажные схемы без отклонения от объема изобретения. Изобретение ограничивается только прилагаемой формулой изобретения.
АКРОНИМЫ И АББРЕВИАТУРЫ
АРП - асинхронный режим передачи
БАРП - интерфейсный блок АРП
БИС - блок интерфейса СCOС или блок интерфейса КМ
БКП - блок коммутации пакета
БОЛ - блок обработки линии
БОП - бит-ориентированный протокол
БСР - блок совместной работы
БУП - блок управления протоколом
БЦМ - блок цифровой магистрали
ВК - виртуальный канал
ВПО - вмешательство процессора ОШП
ВСК - временная ступень коммутации
ВСККМ - временная ступень коммутации контроллера модуля по уровням
ГИП - графический интерфейс пользователя
ГКМ - глобальный КМ
ИСПБ - изменяемая (переменная) скорость передачи бит (нагрузка)
ИТУ - интерфейс трактов УСС
ИУСС - интерфейс узла сети связи
КМ - коммутационный модуль
КВО - канал встроенных операций
КДС - канал передачи данных сигнальных сообщений (СС7)
ККМД - коммутатор коммутируемых в мегабитах данных
КЦИ - контроль при помощи циклического избыточного кода
КЦС - канал цифровой связи
МККТТ - стандарт Международного консультативного комитета по телеграфии и телефонии
МО - модуль организации прохождения
МУА - модуль управления АРП
ООП - операции, организация, поддержка
ООПО - операции, организация, поддержка и обеспечение
ОССС - ориентированная на соединение сетевая служба
ОШП - общая широкополосная платформа
ПАА - преобразователь адреса АРП
ПВИ - присвоение временного интервала
ПВК - постоянный виртуальный канал
ПДТВ - процедура доступа тракта (тип) B
ПДТD - процедура доступа тракта (тип) D
ПЗУ на КД - постоянное запоминающее устройство на компакт-дисках
ПКМ- процессор коммутационного модуля
ПСПБ - постоянная скорость передачи бит (нагрузка)
ПСЯ - процессор списка ячеек
ПУАА - процессор уровня адаптации АРП
СВУ - синхронное временное уплотнение
СПСЦД - система перекрестного соединения цифрового доступа
СР - сдвиговый регистр
СРЛС - сдвиговый регистр линии связи
СС7 - система передачи сигнальных сообщений (номер) 7
ССВ - синхронный сигнал времени
CСOС - синхронная сеть оптической связи
СУП - синхронизация и управление периферией (тракт)
СЦИ - синхронная цифровая иерархия
ТПС - точка передачи сигнала
УАА - уровень адаптации АРП
УВИ - управляющий временной интервал
УСС - управление и синхронизация сети связи (тракт)
УСУ - устройство сообщений по уровням
УУПА - устройство управления пакетом АРП
ЦК БАРП - центральный контроллер БАРП
ЦСКУ - цифровая сеть связи с комплексными услугами
ЧПС - часть передачи сообщений
ЧСУС - часть соединения и управления сигнальными сообщениями
ШБЯ - широкий буфер ячеек
ЯЧМ - язык человеко-машинного общения
DSO - сигнал с одним каналом ИКМ 64 кбит/с
DS1 - сигнал, состоящий из 24 сигналов DSO
HDLC - протокол HDLC, высокоуровневое управление каналом (передачи) данных
SCSI - интерфейс SCSI, интерфейс малых вычислительных систем (промышленный стандарт)с
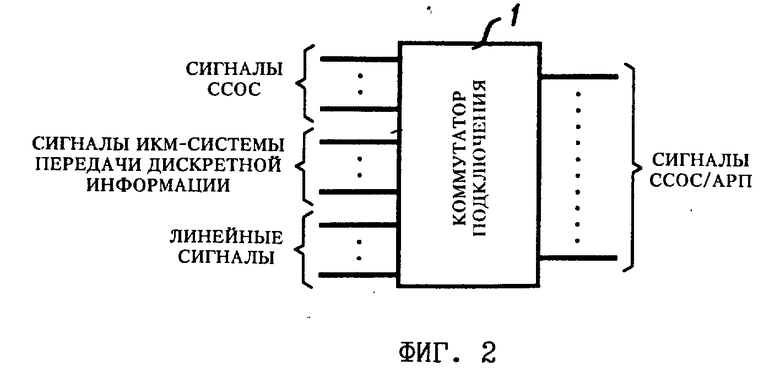
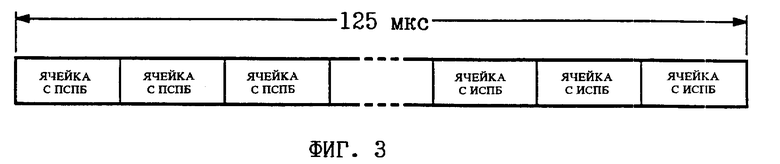
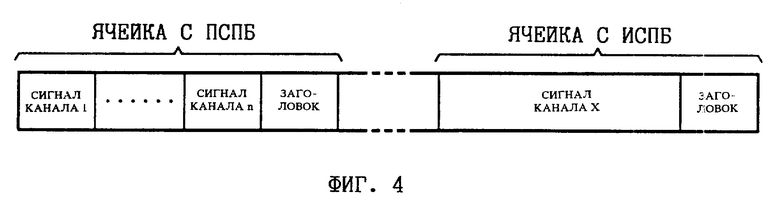
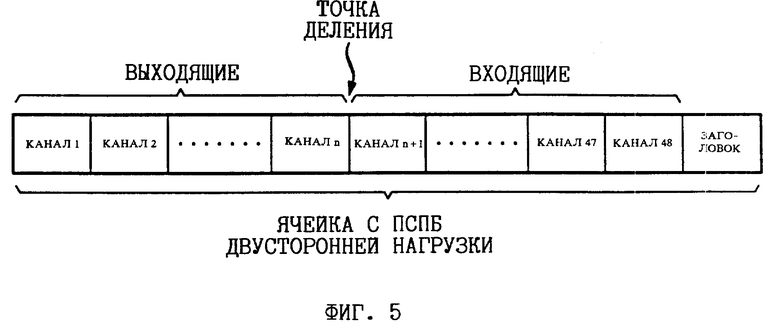
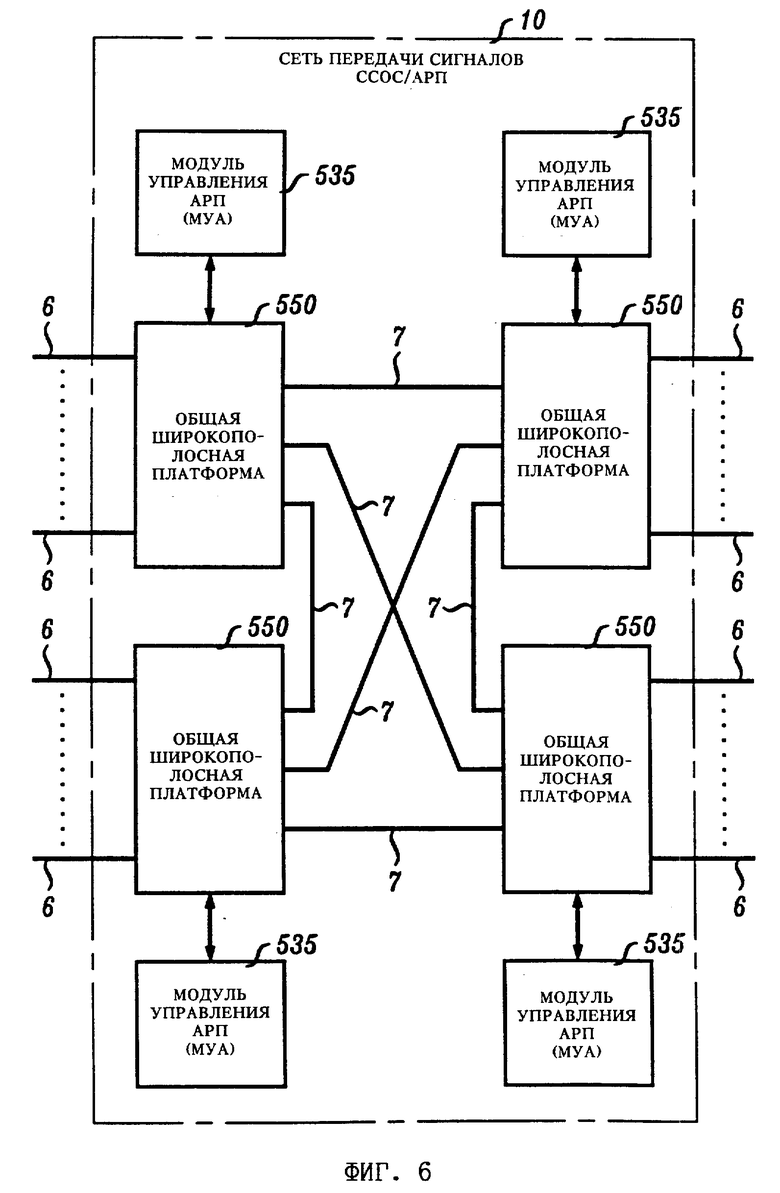
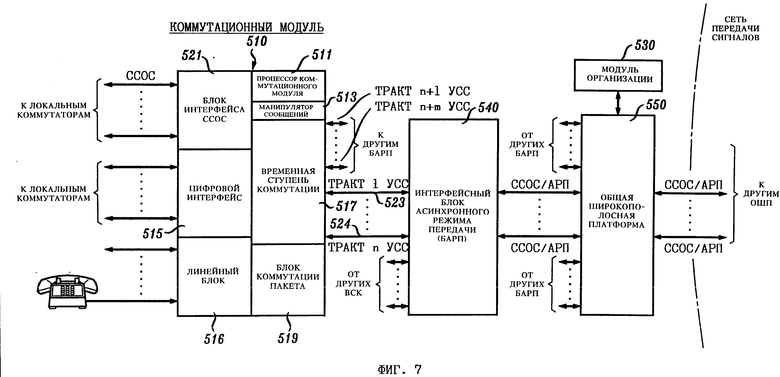
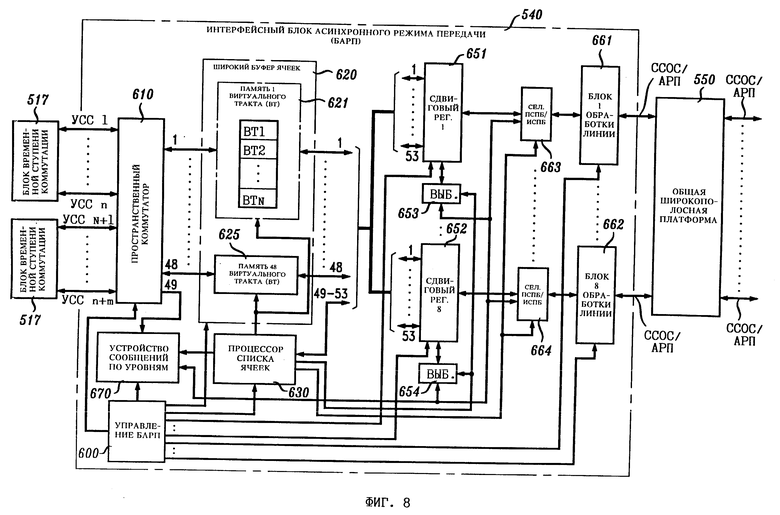
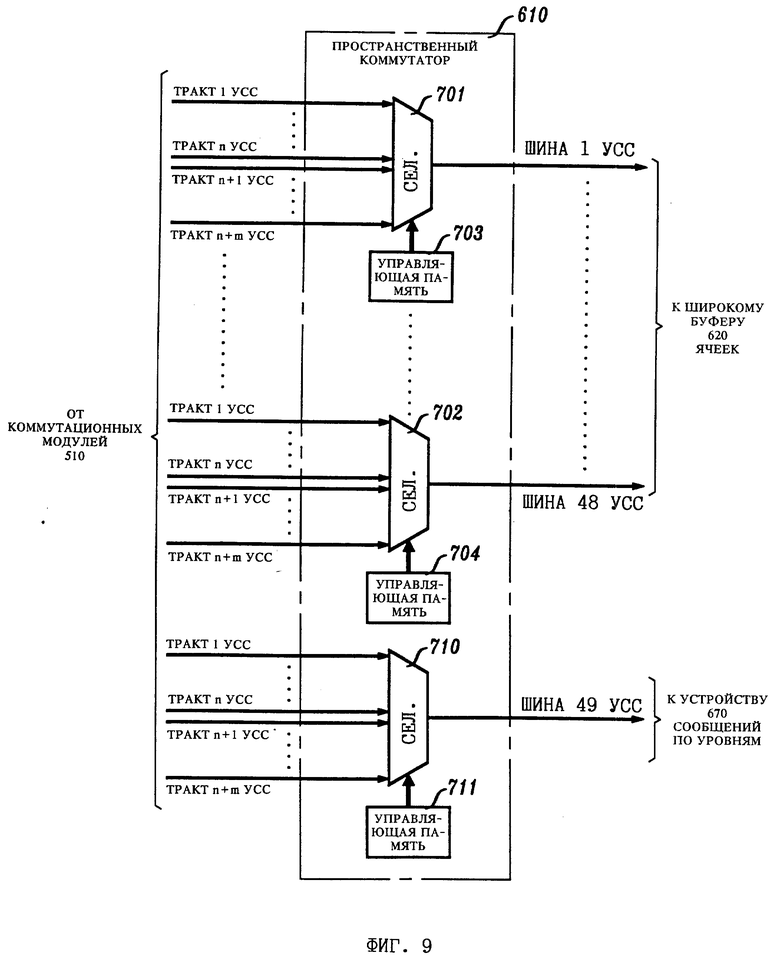
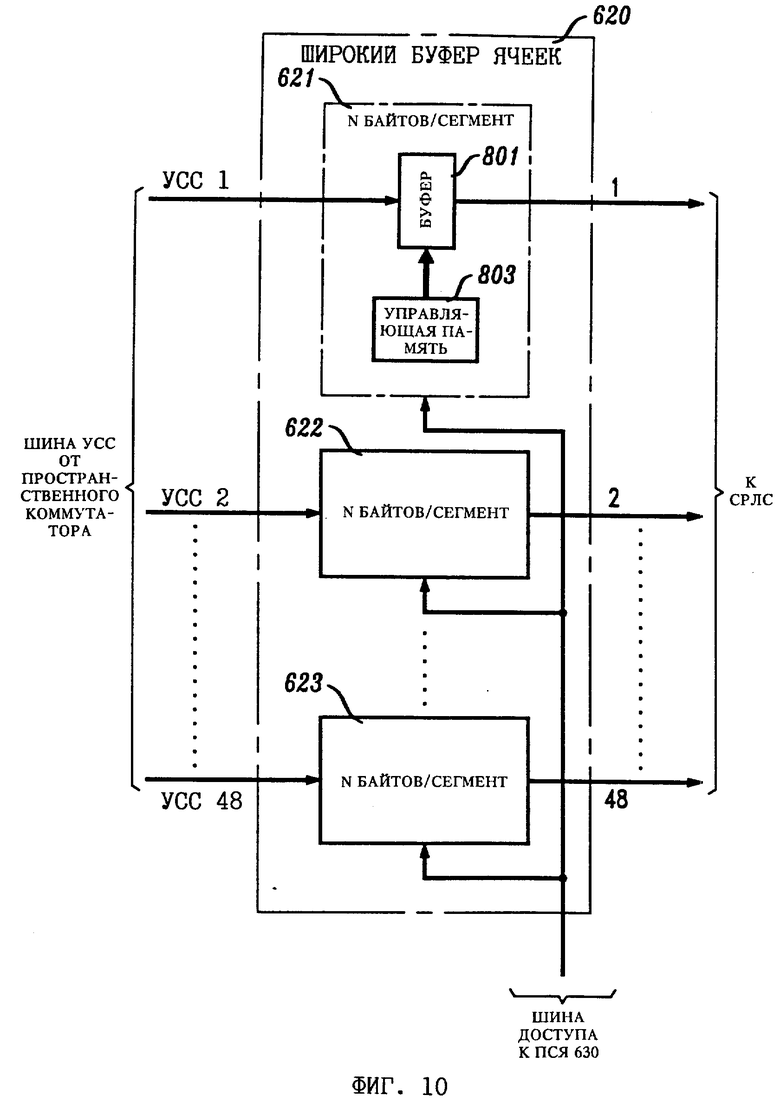
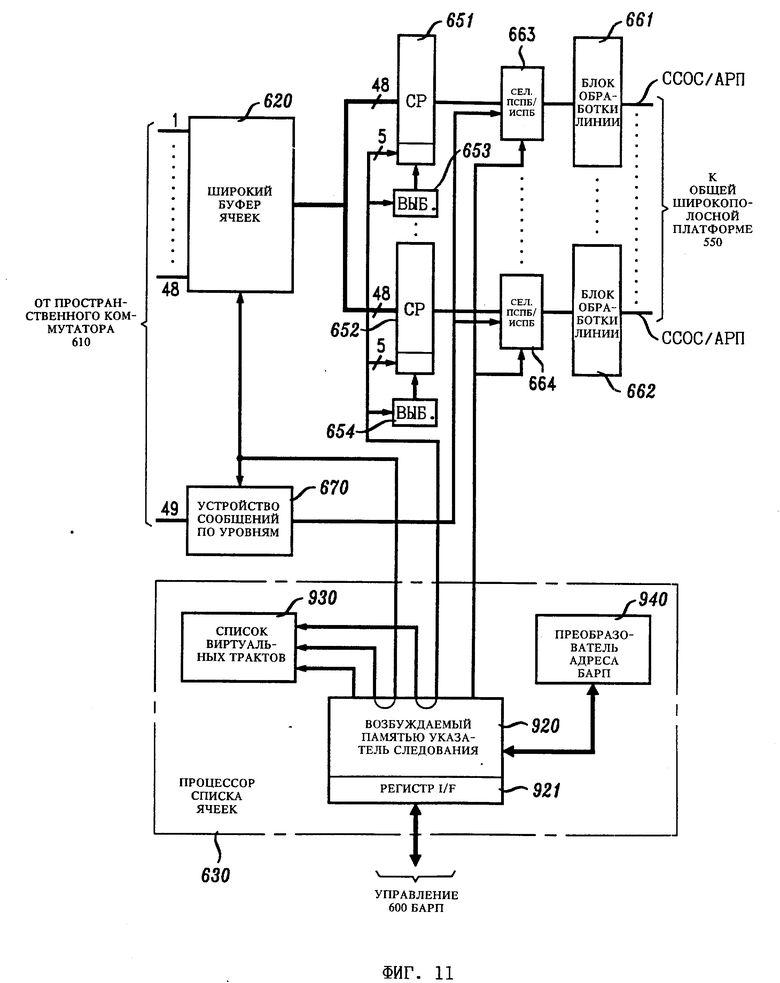
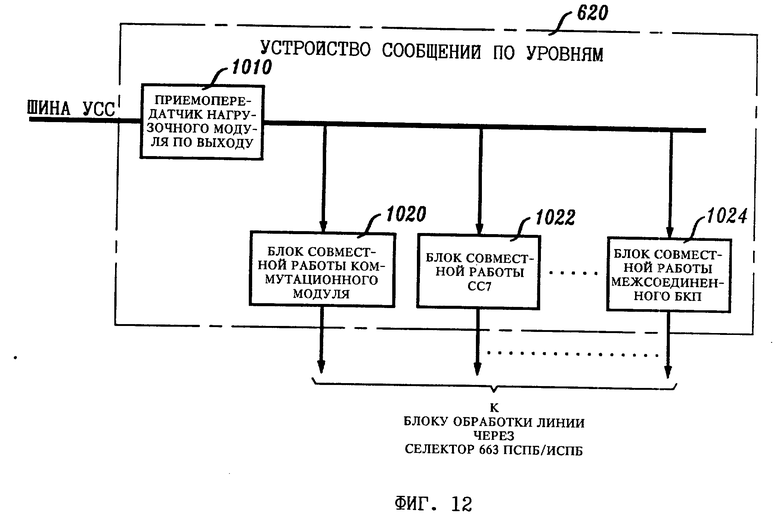
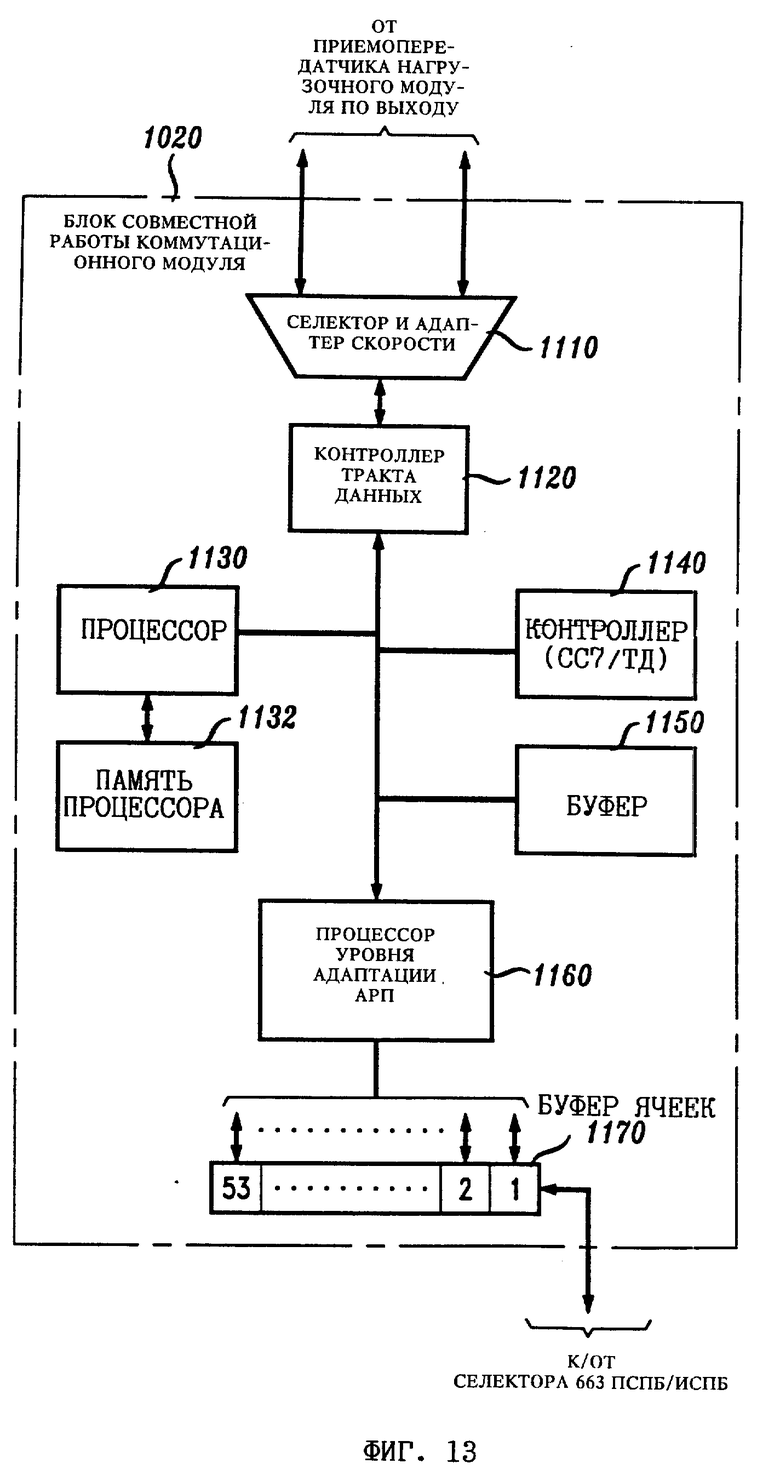
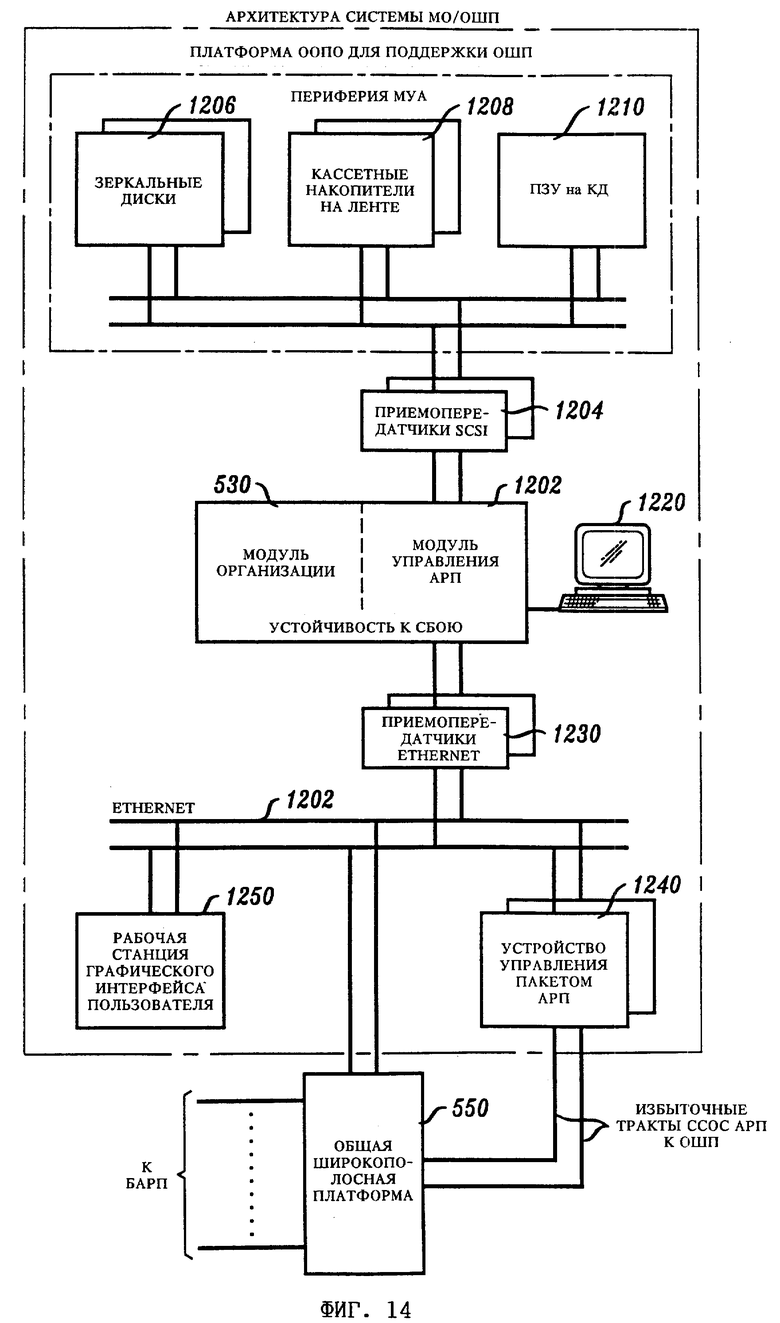
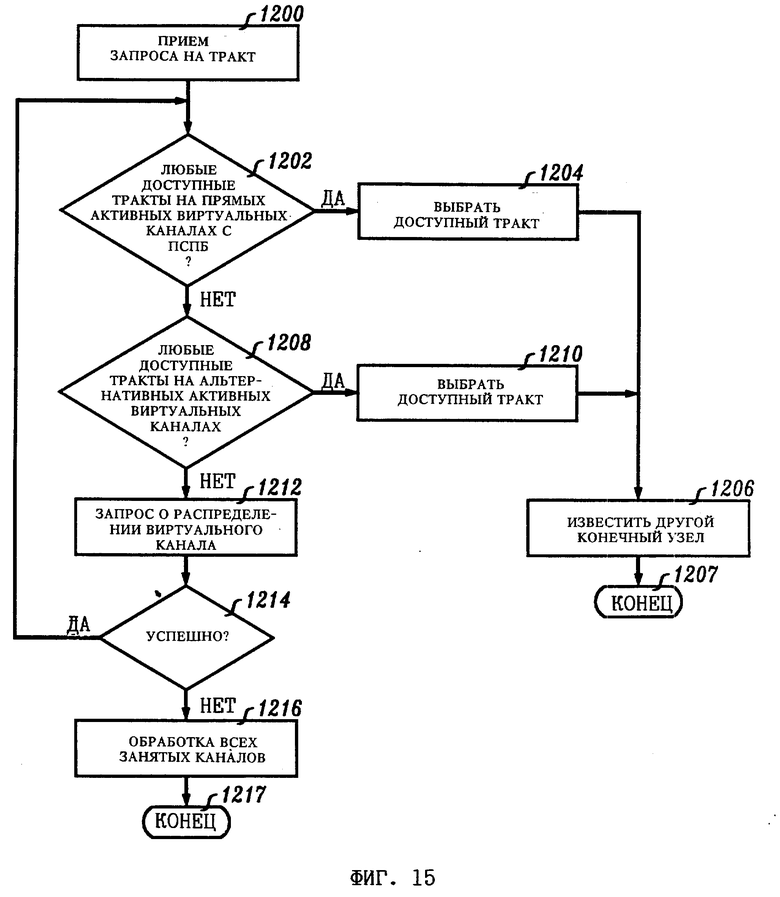
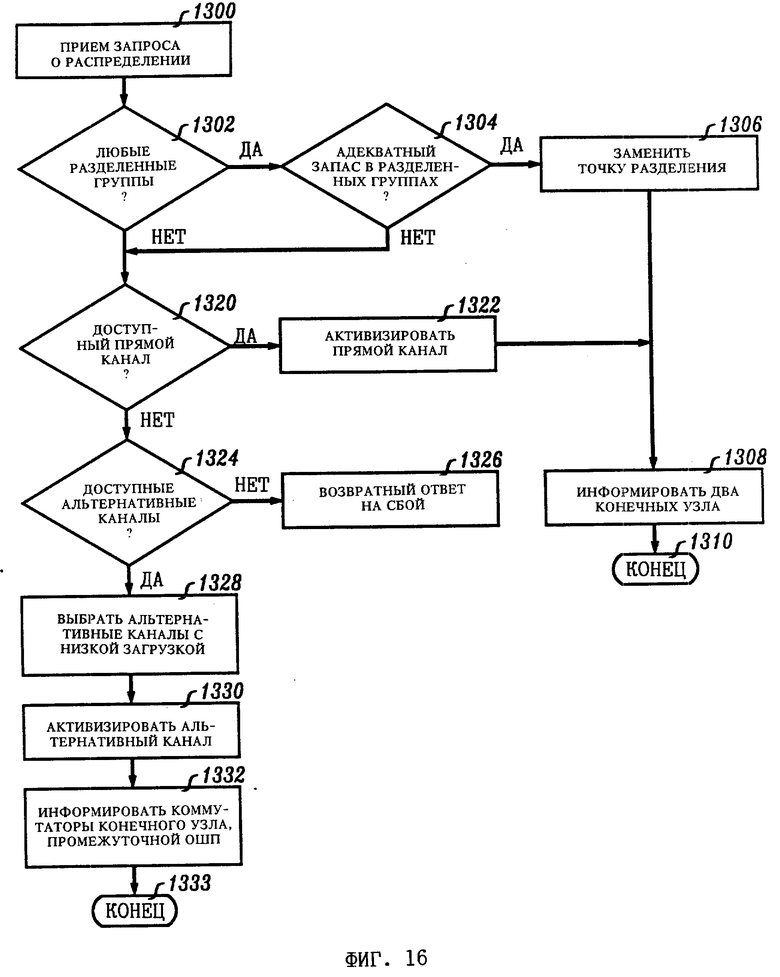
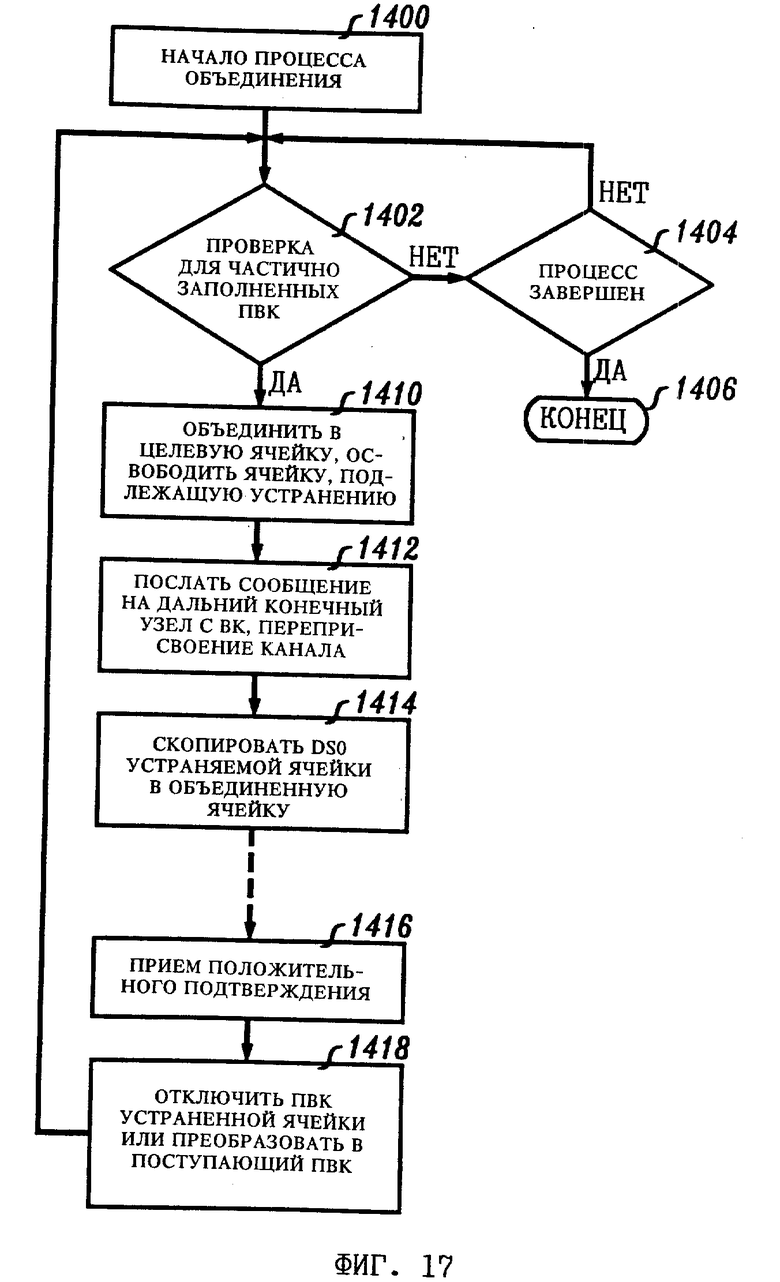
Изобретение относится к системам для установления цифровых соединений сетей связи и, более конкретно, для установления таких соединений с использованием широкополосных сетей и коммутационных систем. Достигаемый технический результат - получение большой коммутационный системы высокой емкости или большой группы тесно взаимосвязанных небольших коммутационных систем. В соответствии с изобретением поток сигналов импульсно-кодовой модуляции (ИКМ) преобразуется в ячейки асинхронного режима передачи (АРП) для коммутации и передачи по сети связи. Каждая ячейка переносит одну выборку ИКМ из сорока восьми соединений речевых сигналов, имеющих общее место назначения. Ячейки передаются по виртуальным каналам АРП, причем каждый канал передает одну ячейку каждые 125 мкс. Системы передачи АРП обеспечивают интерфейсную связь с системами ИКМ без внесения значительной задержки и без дополнительной буферизации. Новые линии речевого сигнала могут быть установлены путем использования доступных интервалов в ячейках существующих виртуальных трактов. 2 с. и 53 з.п.ф-лы, 17 ил.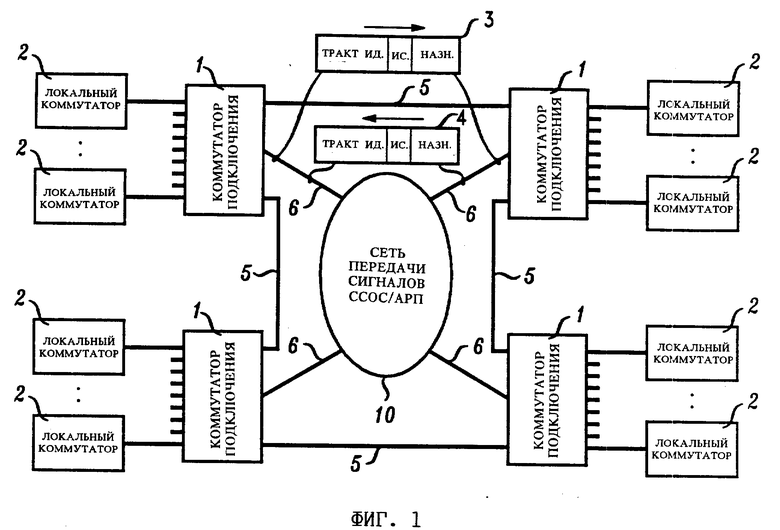
| EP 0225714 А, 16.06.87 | |||
| Способ получения производных дифениламинопропана | 1973 |
|
SU488399A3 |

