Изобретение относится к железнодорожной автоматике, в частности к контролю за движением поездов, свободностью и исправностью рельсовой линии.
Известен способ контроля состояния рельсовой линии, заключающийся в том, что в рельсовую линию на одном ее конце подают сигнал, по реакции рельсовой линии на поданный сигнал, измеренной на том же конце, судят о состоянии рельсовой линии, в том числе о ее свободности (SU, авторское свидетельство N 1832092, B 61 L 23/16, 1989).
Недостатком данного способа является невозможность обеспечить контроль за состоянием длинной рельсовой линии и ограниченные функциональные возможности: отсутствие контроля исправности рельсовой линии, отсутствие информации о сопротивлениях балласта и рельсовой нити, отсутствие информации о расстоянии до шунта при условии его наличия.
Известна рельсовая цепь повышенной длины, содержащая генератор сигнала, один полюс которого соединен с первой рельсовой нитью на одном конце рельсовой линии, измерительное устройство, выполненное в виде аналого-цифрового преобразователя, выход которого подключен к входу устройства обработки информации и управления (RU, патент N 2022855, B 61 L 23/16, 1991).
Недостатками данной рельсовой цепи являются малая длина контролируемой рельсовой линии и ограниченные функциональные возможности: отсутствие контроля исправности рельсовой линии и скорости подвижной единицы при занятой рельсовой линии.
Технический результат, на достижение которого направлено данное изобретение, заключается в возможности увеличения длины контролируемой рельсовой линии и расширении функциональных возможностей рельсовой цепи, связанных с осуществлением контроля состояния и исправности рельсовой линии.
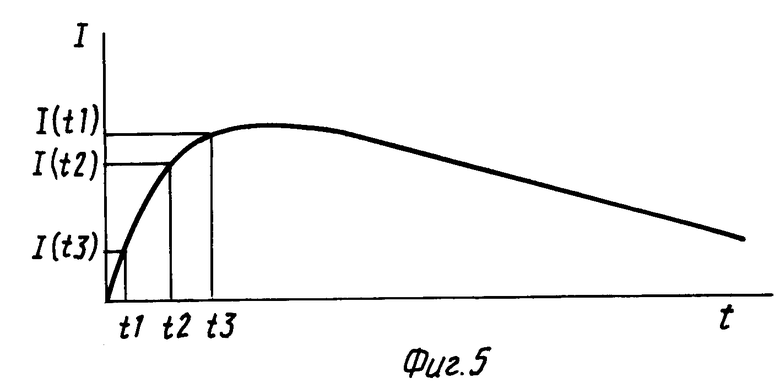
Технический результат достигается тем, что в способе контроля состояния рельсовой линии, заключающемся в том, что в рельсовую линию на одном ее конце подают сигнал, по реакции рельсовой линии на поданный сигнал, измеренной на том конце, судят о состоянии рельсовой линии, в том числе о ее свободности, упомянутый сигнал формируют в виде импульса напряжения с широким частотным спектром, определяют сопротивление R рельсовой нити, индуктивность L рельсовой нити и сопротивление Rб балласта по кривой тока переходного процесса путем выбора на упомянутой кривой трех точек
I(t1), I(t2) и I(t3) и решения
системы нелинейных алгебраических уравнений
относительно R, L и Rб,
где
Zг- сопротивление генератора сигнала,
Zн - сопротивление нагрузки рельсовой линии,
при этом длину свободной рельсовой линии определяют по соотношению
X = L/Lуд,
где
Lуд - заранее известная удельная индуктивность рельсовой линии,
сравнивают длину X с длиной контролируемой рельсовой линии и при превышении ею длины X свободной части рельсовой линии или наоборот судят о занятом или свободном состоянии рельсовой линии соответственно, определяют зависящие от времени удельное сопротивление рельсовой нити Rуд = R/X и удельное сопротивление балласта Rбуд = Rб • X, которые сравнивают с заданными удельными сопротивлениями рельсов и балласта и в случае превышения зависящим от времени удельным сопротивлением рельсов заданного или заданным удельным сопротивлением балласта, зависящего от времени, принимают решение о неисправности рельсовой линии, а рельсовая цепь повышенной длины, содержащая генератор сигнала, один полюс которого соединен с первой рельсовой нитью на одном конце рельсовой линии, измерительное устройство, выполненное в виде аналого-цифрового преобразователя, выход которого подключен к входу устройства обработки информации и управления, снабжена нагрузочным элементом, подключенным к другому концу рельсовой линии, при этом генератор сигнала выполнен в виде генератора импульсов с входом управления, другой полюс его связан с второй рельсовой нитью на первом упомянутом конце рельсовой линии через измерительное устройство, включающее в себя резистор, включенный параллельно аналого-цифровому преобразователю, и подключенное выходом - к входу управления генератора сигнала.
На фиг. 1 изображена функциональная схема рельсовой цепи повышенной длины; на фиг. 2 - схема генератора импульсов; на фиг. 3 - схема измерительного устройства; на фиг. 4 - схема устройства обработки информации и управления; на фиг. 5 - кривая тока переходного процесса в рельсовой линии.
Рельсовая цепь повышенной длины в соответствии с фиг.1 содержит рельсовую линию 1, генератор импульсов 2, измерительное устройство 3, устройство обработки информации и управления 4, нагрузку 5, причем генератор импульсов 2 и измерительное устройство 3 находится на одном конце рельсовой линии 1, а на другом конце рельсовой линии находится нагрузка 5. Один полюс выхода генератора импульсов 2 соединен с первой рельсовой нитью, а другой полюс его выхода через измерительное устройство 3 соединен с другой рельсовой нитью. Кроме того, вход устройства обработки информации и управления 4 соединен с информационным выходом измерительного устройства 3, а его выход - со входом управления генератора импульсов 2.
В соответствии с фиг. 2 может быть использован генератор, содержащий выпрямитель 6, ключ 7, конденсатор 8 и ключ 9.
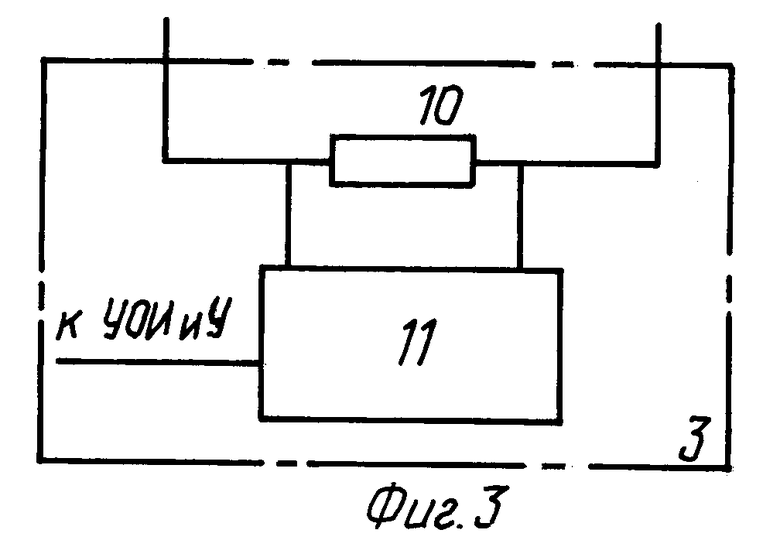
В соответствии с фиг. 3 измерительное устройство состоит из резистора 10 и аналого-цифрового преобразователя 11, соединенных параллельно.
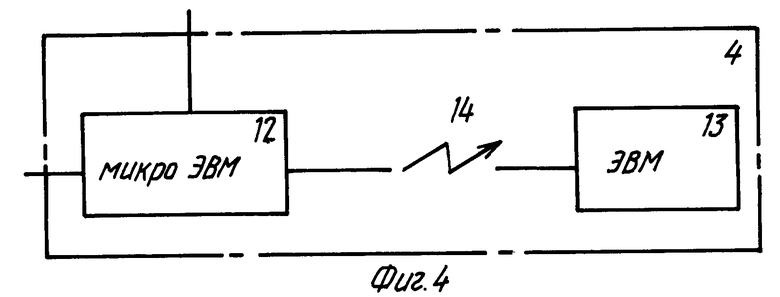
В соответствии с фиг. 4 устройство обработки информации и управления может представлять собой программно-аппаратный комплекс, содержащий однокристальную микроЭВМ 12 с внешней памятью, ЭВМ 13, находящуюся на станции и выдающую конечную информацию, и линию связи 14 между ними.
Конкретная реализация данного способа взаимосвязана с конкретным устройством рельсовой цепи. Если устройство рельсовой цепи соответствует заявляемой рельсовой цепи повышенной длины, то способ контроля состояния рельсовой линии осуществляется следующим образом.
По управляющему сигналу от устройства обработки информации и управления 4 генератор импульсов 2 посылает в рельсовую линию 1 импульс разряда конденсатора. Ток переходного процесса, идущего в рельсовой линии 1, имеет вид, как на фиг.5. Измерительное устройство 3 снимает ток переходного процесса, идущего в рельсовой линии 1, и посылает его в устройство обработки информации и управления с заданным шагом времени, которое обрабатывает кривую тока.
Обрабатывать кривую тока переходного процесса можно следующим образом. На кривой выбирают, например, три точки (t1, I(t1); t2, I(t2); t3, I(t3)) и рассчитывают параметры рельсовой линии путем решения методом Ньютона системы нелинейных алгебраических уравнений
относительно R, L и Rб,
где
Zг - сопротивление генератора;
Zн - сопротивление нагрузки;
R - сопротивление рельсовой нити;
L - индуктивность рельсовой нити;
Rб - сопротивление балласта.
Для данного варианта рельсовой цепи в операторном виде
где
s - оператор Лапласа;
U(0) - начальное напряжение на конденсаторе;
C - емкость конденсатора на входе рельсовой линии;
ZГ = l/sC;
ZН = 0.
Далее вычисляют
X = L/Lуд,
Rуд = R/X,
RБуд = RБ • X,
где
X - длина свободной рельсовой линии;
Lуд - удельная индуктивность рельсовой нити, заранее известная величина;
Rуд - удельное сопротивление рельсовой нити, зависящая от времени величина;
RБуд - удельное сопротивление балласта, величина, зависящая от времени.
Потом принимают решение о состоянии рельсовой линии:
1. Если величина X больше длины рельсовой линии, то принимается решение о свободности рельсовой линии;
2. Если величина удельного сопротивления рельсовой нити больше предельного или величина удельного сопротивления балласта меньше предельного, то принимается решение о неисправности рельсовой линии.
3. Если рельсовая линия занята, то вычисляется скорость подвижной единицы как разность текущего и предыдущего значения X, деленная на период времени между импульсами.
Конкретная реализация рельсовой цепи повышенной длины при использовании данного способа заключается в следующем. Изображенный на фиг. 2 генератор импульсов работает таким образом: через выпрямитель 6 и ключ 7 заряжается конденсатор 8, который по сигналу из устройства обработки информации и управления 4 разряжается через ключ 9 в рельсовую линию 1. Изображенное на фиг. 3 измерительное устройство 3 работает следующим образом: аналого-цифровой преобразователь 11 преобразует снимаемое с резистора 10 напряжение, преобразует его в код и посылает в устройство обработки информации и управления 4, изображенное на фиг. 4, и работающее следующем образом: однокристальная микроЭВМ 12 запоминает кривую тока переходного процесса, проводит ее предварительную обработку и посылает через линию связи 14 в ЭВМ 13, которая проводит окончательную обработку кривой тока переходного процесса и выдает требуемую информацию.
Технико-экономические преимущества предлагаемого технического решения заключаются в том, что уменьшается количество используемой аппаратуры как за счет применения импульсного питания рельсовой линии, так и за счет увеличения длины контролируемой рельсовой линии, причем за счет использования современных средств автоматики и вычислительной техники повышается гибкость принятия решения и возможность повысить длину контролируемой рельсовой линии и изменить количество и качество выдаваемой информации о состоянии рельсовой линии, изменяя при этом только математическое обеспечение устройства обработки информации и управления 4.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения расстояния до колесной пары железнодорожного подвижного состава и устройство для его осуществления | 2023 |
|
RU2824227C1 |
| УСТРОЙСТВО КОНТРОЛЯ ЦЕЛОСТНОСТИ РЕЛЬСА | 2010 |
|
RU2424936C1 |
| СИСТЕМА КОНТРОЛЯ СОПРОТИВЛЕНИЯ БАЛЛАСТА И ЦЕЛОСТНОСТИ РЕЛЬС ЖЕЛЕЗНОДОРОЖНОЙ ЛИНИИ С ПРИМЕНЕНИЕМ СИГНАЛОВ С ЛИНЕЙНОЙ ЧАСТОТНОЙ МОДУЛЯЦИЕЙ | 2014 |
|
RU2592027C2 |
| РЕЛЬСОВАЯ ЦЕПЬ | 1997 |
|
RU2127685C1 |
| СПОСОБ ИЗМЕРЕНИЯ МЕХАНИЧЕСКИХ ПЕРЕМЕЩЕНИЙ В ЭЛЕКТРОМАГНИТНЫХ РЕЛЕ | 1994 |
|
RU2074439C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОЙ БЛОКИРОВКИ С РЕЛЬСОВЫМИ ЦЕПЯМИ БЕЗ ИЗОЛИРУЮЩИХ СТЫКОВ | 1997 |
|
RU2116923C1 |
| РЕЛЬСОВАЯ ЦЕПЬ ТОНАЛЬНОЙ ЧАСТОТЫ | 1995 |
|
RU2116215C1 |
| Рельсовая цепь | 1980 |
|
SU1004182A1 |
| ФАЗОЧУВСТВИТЕЛЬНЫЙ ПУТЕВОЙ ПРИЕМНИК | 1994 |
|
RU2089427C1 |
| РЕЛЬСОВАЯ ЦЕПЬ | 2000 |
|
RU2183575C2 |
Способ контроля состояния рельсовой линии заключается в том, что в рельсовую линию на одном ее конце подают импульс напряжения с широким частотным спектром и по реакции рельсовой линии на поданный сигнал, измеренный на том же конце, судят о состоянии рельсовой линии. Рельсовая цепь повышенной длины содержит генератор сигнала, измерительное устройство, включающее в себя резистор, включенный параллельно аналого-цифровому преобразователю, и подключенное выходом к входу управления генератора сигнала и входу устройства обработки информации и управления, и нагрузочный элемент. Технический результат заключается в расширении функциональных возможностей рельсовой цепи. 2 с.п.ф-лы, 5 ил.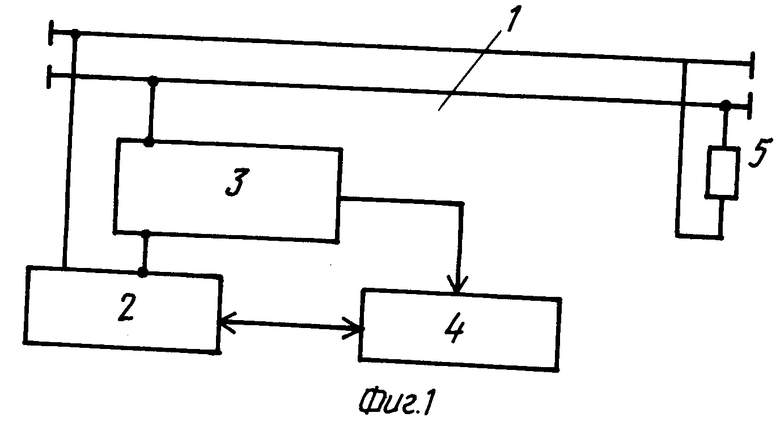
I(t1) = I(t1, Zг, Zн, R, L, Rб),
I(t2) = I(t2, Zг, Zн, R, L, Rб),
I(t3) = I(t3, Zг, Zн, R, L, Rб)
относительно R, L и Rб,
где Zг - сопротивление генератора сигнала;
Zн - сопротивление нагрузки рельсовой линии,
при этом определяют длину свободной рельсовой линии определяют по соотношению
X = L / Lуд,
где Lуд - заранее известная удельная индуктивность рельсовой линии,
сравнивают длину X с длиной контролируемой рельсовой линии и при превышении ею длины X свободной части рельсовой линии или наоборот судят о занятом или свободном состоянии рельсовой линии соответственно, определяют зависящие от времени удельное сопротивление рельсовой нити Rуд = R / X и удельное сопротивление балласта Rбуд = Rб • X, которые сравнивают с заданными удельными сопротивлениями рельсов и балласта и в случае превышения зависящим от времени удельным сопротивлением рельсов заданного или заданным удельным сопротивлением балласта зависящего от времени принимают решение о неисправности рельсовой линии.
| RU, патент N 2022855, B 61 L 23/16, 1991 | |||
| SU, авторское свидетельство N 1832092, B 61 L 23/16, 1989. |

