Изобретение относится к железнодорожной автоматике и телемеханике, а именно к устройствам, обеспечивающим контроль целостности рельсовой линии в системах железнодорожной автоматики.
Известна рельсовая цепь (авторское свидетельство СССР на изобретение №1794752, B61L 23/16, приоритет 23.11.1989 г., опубликовано 15.02.1993 г.), которая используется в электрических рельсовых цепях железнодорожной автоматики и содержит рельсовую линию, опорный трансформатор, согласующий трансформатор, триггер, регистраторы, блок анализа состояния рельсовой линии, регистр сдвига, аналого-цифровой преобразователь, формирователь импульсов, компараторы, детектор.
Недостатком данной рельсовой цепи является необходимость прокладки провода, длина которого равна длине контролируемого участка. Кроме того, данное устройство требует периодической корректировки прошивки ПЗУ по крайне мере при сезонных колебаниях температуры (зима - лето), т.к. сопротивление балласта колеблется от единиц Ом×км летом до десятков и сотен зимой, и сопротивление рельсов также значительно меняется при переходе от отрицательных к положительным температурам, что делает данное устройство неудобным в эксплуатации.
Известна также рельсовая цепь (патент РФ №2067056, B61L 23/16, приоритет 13.05.1992, опубликовано 27.09.1996), которая используется для регулирования движения поездов и содержит источник сигнала, согласующие элементы, рельсовую линию, путевое реле, функциональный преобразователь, блок памяти, элемент задержки.
Недостатком данной рельсовой цепи является необходимость прокладки провода, длина которого равна длине контролируемого участка.
Наиболее близким по технической сущности и достигаемому эффекту к предлагаемому изобретению являются способ контроля состояния рельсовой линии и рельсовая цепь повышенной длины, относящиеся к железнодорожной автоматике, в частности, к контролю за движением поездов, свободностью и исправностью рельсовой линии. Рельсовая цепь повышенной длины содержит генератор сигнала, один полюс которого соединен с первой рельсовой нитью на одном конце рельсовой линии, измерительное устройство, выполненное в виде аналого-цифрового преобразователя, выход которого подключен к входу устройства обработки информации и управления, нагрузочный элемент, подключенный к другому концу рельсовой линии, при этом генератор сигнала выполнен в виде генератора импульсов с входом управления, другой полюс его связан с второй рельсовой нитью на первом упомянутом конце рельсовой линии через измерительное устройство, включающее в себя резистор, включенный параллельно аналого-цифровому преобразователю, и подключенное выходом к входу управления генератора сигнала (патент РФ №2117596, B61L 23/16, приоритет 12.09.1995 г., опубликовано 20.08.1998 г., бюл. №23).
Недостатком рельсовой цепи повышенной длины является недостаточная защищенность от помех частотой 50 Гц (сеть электропитания) и 25 Гц (смежные рельсовые цепи). Это связано с расчетом параметров рельсовой цепи по одному зондирующему импульсу (нет усреднения по нескольким импульсам, нет импульсов с противоположной полярностью и периодом следования, кратным периоду помехи для ее исключения). Кроме того, конденсатор, входящий в состав генератора импульсов, должен иметь большую емкость (доли фарады), такую емкость можно получить только с использованием электролитических конденсаторов, обладающих малой температурной и временной стабильностью, что приводит к увеличению погрешности расчета параметров рельсовой цепи, за счет изменения исходного значения емкости. Другим недостатком является необходимость передачи массива данных кривой тока от микро-ЭВМ в ЭВМ, что требует канала связи с большой пропускной способностью при длине до 1-2 км. При большом количестве подгорочных путей это влечет значительные затраты на реализацию канала связи.
Недостатки приведенных выше изобретений устраняются в предлагаемом устройстве контроля целостности рельса. Для соединения устройства с рельсовой линией требуются провода (перемычки) минимальной длины. Параметры рельсовой цепи рассчитываются по кривой тока, для снятия которой не требуется быстродействующих компонентов (в зависимости от расстояния до отцепа длительность переходного процесса от долей до десятков мс). Влияние помех исключается за счет выдачи 4 зондирующих импульсов разной полярности с периодом повторения, кратным периоду повторения помех. Погрешность из-за изменения величины емкости устраняется введением стабилизатора напряжения. Расчет параметров рельсовой цепи производится полностью микроконтроллером (МК), на ЭВМ передается код индуктивности и сопротивления рельсовой цепи в условных единицах, что снижает требования к каналу связи по скорости передачи и количеству линий связи.
Технический результат, на достижение которого направлено данное изобретение, заключается в повышении точности и стабильности измерения параметров рельсовой цепи за счет уменьшения влияния помех и увеличения стабильности работы при изменении температуры окружающей среды, а также в сокращении затрат на кабельную сеть.
Технический результат достигается тем, что устройство контроля целостности рельса, содержащее генератор импульсов с входом управления, один полюс которого соединен с первой рельсовой нитью на одном конце рельсовой линии, другой полюс которого соединен со второй рельсовой нитью на этом же конце рельсовой линии через измерительное устройство, включающее в себя резистор, включенный параллельно аналого-цифровому преобразователю, и подключенное выходом к входу устройства обработки информации и управления, выход которого соединен с входом управления генератора импульсов, при этом к другому концу рельсовой линии подключен дроссель, снабжено дополнительно в части генератора импульсов связанными между собой коммутатором и стабилизатором напряжения, вход которого соединен с емкостью, выход с входом коммутатора напряжения, вход управления которого связан с выходом устройства обработки информации и управления, а выход - с рельсовой линией.
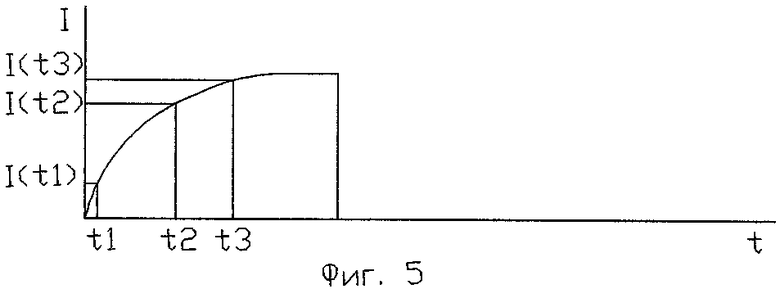
На фиг.1 показана структурная схема устройства контроля целостности рельса; на фиг.2 - схема генератора импульсов; на фиг.3 - схема измерительного устройства; на фиг.4 - схема устройства обработки информации и управления; на фиг.5 - кривая тока переходного процесса в рельсовой линии.
Устройство контроля целостности рельса в соответствии с фиг.1 содержит генератор импульсов 2, измерительное устройство 3, устройство обработки информации и управления 4, дроссель 5, причем генератор импульсов 2 и измерительное устройство 3 находится на одном конце рельсовой линии 1, а на другом конце рельсовой линии находится дроссель 5. Один полюс выхода генератора импульсов 2 соединен с первой рельсовой нитью, а другой полюс его выхода через измерительное устройство 3 соединен с другой рельсовой нитью. Кроме того, вход устройства обработки информации и управления 4 соединен с информационным выходом измерительного устройства 3, а его выход - с входом управления генератора импульсов 2. Дроссель выбирают таким, чтобы его индуктивность приблизительно была равна 1/3 индуктивности контролируемого участка, что обеспечивает надежное определение повреждения рельсовой линии по всей длине участка.
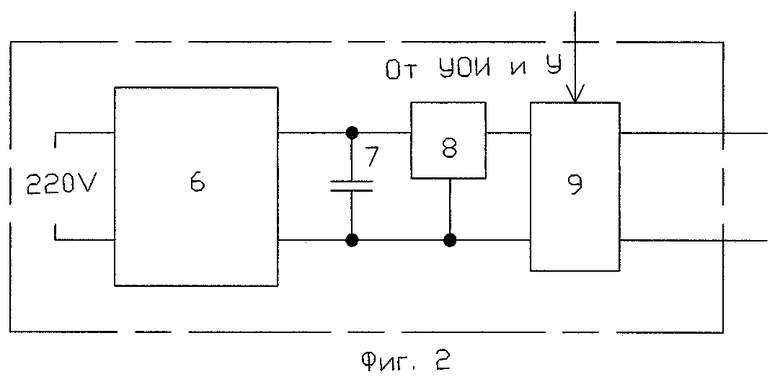
В соответствии с фиг.2 генератор состоит из выпрямителя 6, конденсатора 7, стабилизатора напряжения 8 и коммутатора 9.
В соответствии с фиг.3 измерительное устройство состоит из аналого-цифрового преобразователя 10 и резистора 11, соединенных параллельно.
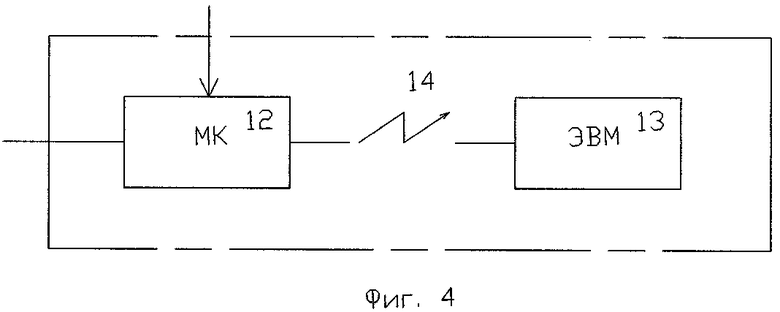
В соответствии с фиг.4 устройство обработки информации и управления (УОИ и У) может представлять собой программно-аппаратный комплекс, содержащий МК 12 и ЭВМ 13, находящуюся на станции и выдающую конечную информацию, и линию связи 14 между ними.
Работа устройства в соответствии с фиг.1 осуществляется следующим образом. По управляющим сигналам от устройства обработки информации и управления 4 генератор импульсов 2 посылает в рельсовую линию четыре импульса разной полярности с периодом повторения, кратным 40 мс для исключения помех частотой 25 и 50 Гц. Изменение полярности зондирующих импульсов осуществляется коммутатором, выполненным на электронных компонентах. Под воздействием сигналов управления коммутатор подключает к рельсовым нитям выход стабилизатора напряжения 8 то в одной, то в другой полярности. Ток переходного процесса, идущего в рельсовой линии 1, имеет вид, показанный на фиг.5. Измерительное устройство 3 снимает ток переходного процесса, идущего в рельсовой линии 1 по каждому импульсу, и с заданным шагом времени посылает его в устройство обработки информации и управления. Последнее усредняет кривые тока, полученные от четырех импульсов, устраняя при этом возможные помехи, и обрабатывает усредненную кривую тока. Усреднение и обработку кривой тока производит МК. Рассчитанные коды индуктивности и сопротивления рельсовой цепи в условных единицах МК посылает по каналу связи в ЭВМ для окончательной обработки и анализа. Программой ЭВМ производится расчет фактической индуктивности и фактического сопротивления рельсовой цепи участка. По результатам расчета и при наличии сигнала свободности участка программа ЭВМ делает вывод об исправности (целостности) рельсовой линии и выводит информацию на экран монитора и (или) передает информацию в канал связи на следующий уровень управления. ЭВМ может быть связана с несколькими МК и, соответственно, получать информацию о параметрах рельсовых цепей и свободности нескольких участков путей.
Обрабатывать кривую тока переходного процесса можно следующим образом. На кривой выбирают, например, три точки (t1, I(t1); t2, I(t2); t3, I(t3)) и рассчитывают параметры рельсовой линии путем решения методом Ньютона системы нелинейных алгебраических уравнений:
относительно R, L и Rб,
где
Rг - сопротивление генератора, которое равно сумме сопротивлений резистора 11 измерительного устройства и проводов, соединяющих выход генератора с рельсовыми нитями;
R - сопротивление рельсовой нити;
L - индуктивность рельсовой нити (при занятости - индуктивность свободной части рельсовой линии, при свободности - индуктивность всего контролируемого участка с учетом индуктивности дросселя);
Rб - сопротивление балласта.
Для данного варианта рельсовой цепи в операторном виде:
где
s - оператор Лапласа;
U - выходное напряжение стабилизатора напряжения.
Далее принимают решение о целостности рельсов:
если при свободности участка рассчитанные значения индуктивности и сопротивления равны индуктивности и сопротивлению рельсовой линии участка с учетом дросселя и погрешности измерения, то принимается решение о целостности рельсов, в противном случае - нарушение целостности.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство контроля целостности рельсовой линии | 2021 |
|
RU2762973C1 |
| Способ измерения расстояния до колесной пары железнодорожного подвижного состава и устройство для его осуществления | 2023 |
|
RU2824227C1 |
| СИСТЕМА КОНТРОЛЯ СОПРОТИВЛЕНИЯ БАЛЛАСТА И ЦЕЛОСТНОСТИ РЕЛЬС ЖЕЛЕЗНОДОРОЖНОЙ ЛИНИИ С ПРИМЕНЕНИЕМ СИГНАЛОВ С ЛИНЕЙНОЙ ЧАСТОТНОЙ МОДУЛЯЦИЕЙ | 2014 |
|
RU2592027C2 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ РЕЛЬСОВОЙ ЛИНИИ И РЕЛЬСОВАЯ ЦЕПЬ ПОВЫШЕННОЙ ДЛИНЫ | 1995 |
|
RU2117596C1 |
| Устройство контроля целостности рельса | 2016 |
|
RU2629730C1 |
| СПОСОБ И МОБИЛЬНОЕ УСТРОЙСТВО КОНТРОЛЯ ЦЕЛОСТНОСТИ РЕЛЬСОВЫХ НИТЕЙ | 2019 |
|
RU2710840C1 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЙ СТАНЦИОННЫХ РЕЛЬСОВЫХ ЦЕПЕЙ | 2019 |
|
RU2725312C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ | 2020 |
|
RU2729753C1 |
| УНИВЕРСАЛЬНЫЙ СПОСОБ КОНТРОЛЯ ЦЕЛОСТНОСТИ РЕЛЬСОВЫХ НИТЕЙ МОБИЛЬНЫМИ УСТРОЙСТВАМИ | 2019 |
|
RU2705541C1 |
| УНИВЕРСАЛЬНЫЙ СПОСОБ КОНТРОЛЯ СОСТОЯНИЙ РЕЛЬСОВЫХ ЛИНИЙ | 2017 |
|
RU2671604C1 |

Изобретение относится к железнодорожной автоматике и телемеханике, а именно к устройствам, обеспечивающим контроль целостности рельсовой линии в системах железнодорожной автоматики. Устройство содержит генератор импульсов (2) с входом управления, один полюс которого соединен с первой рельсовой нитью на одном конце рельсовой линии (1), другой полюс которого соединен со второй рельсовой нитью на этом же конце рельсовой линии (1) через измерительное устройство (3). Измерительное устройство включает в себя резистор, включенный параллельно аналого-цифровому преобразователю. Измерительное устройство (3) подключено выходом к входу устройства обработки информации и управления (4), выход которого соединен с входом управления генератора импульсов (2). К другому концу рельсовой линии подключен дроссель (5). Генератор импульсов (2) выполнен с дополнительно установленными связанными между собой коммутатором и стабилизатором напряжения, вход которого соединен с емкостью, выход с входом коммутатора напряжения, вход управления которого связан с выходом устройства обработки информации и управления (4), а выход - с рельсовой линией (1). Достигается повышение точности и стабильности измерения параметров рельсовой цепи. 5 ил.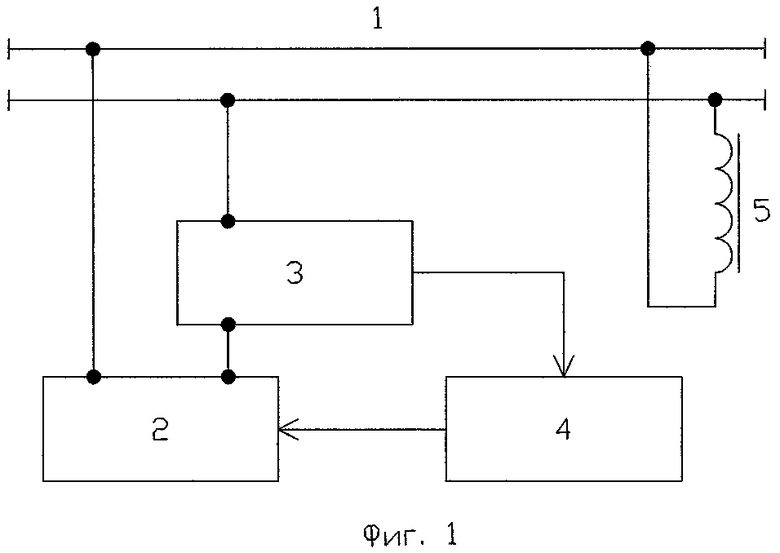
Устройство контроля целостности рельса, содержащее генератор импульсов с входом управления, один полюс которого соединен с первой рельсовой нитью на одном конце рельсовой линии, другой полюс которого соединен со второй рельсовой нитью на этом же конце рельсовой линии через измерительное устройство, включающее в себя резистор, включенный параллельно аналого-цифровому преобразователю, и подключенное выходом к входу устройства обработки информации и управления, выход которого соединен с входом управления генератора импульсов, при этом к другому концу рельсовой линии подключен дроссель, отличающееся тем, что генератор импульсов выполнен с дополнительно установленными, связанными между собой коммутатором и стабилизатором напряжения, вход которого соединен с емкостью, выход с входом коммутатора напряжения, вход управления которого связан с выходом устройства обработки информации и управления, а выход - с рельсовой линией.
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ РЕЛЬСОВОЙ ЛИНИИ И РЕЛЬСОВАЯ ЦЕПЬ ПОВЫШЕННОЙ ДЛИНЫ | 1995 |
|
RU2117596C1 |
| Устройство для контроля величины электрического сопротивления рельсовых стыков | 1974 |
|
SU744366A1 |
| ГЕНЕРАТОР ИМПУЛЬСОВ | 2002 |
|
RU2234805C2 |
| Устройство для измерения давлений | 1960 |
|
SU143585A1 |

