Изобретение относится к устройству и способу для контроля за транзитным временем перевозимых грузов.
Обычно для контроля транзитного времени почтовых отправлений (т.е. времени от момента отправки почтового отправления до момента доставки адресату) применяют так называемые тестеры транзитного времени, которые отправляют вместе с перевозимыми почтовыми отправителями и которые имеют устройства, с помощью которых регистрируется процесс передвижения почтовых отправителей. В состав известных устройств такого типа входит датчик движения, регистрирующий движение в течение всего времени пересылки почтового отправления. Силы, возникающие при транспортировке, действуют при этом на датчик, измеренные значения которого фиксируются на диаграмме движение-время. Если почтовое отправление находится в состоянии покоя, т.е. не происходит никакой его транспортировки, то не происходит и никакой регистрации информации. С помощью таких устройств можно определить, пролежало ли почтовое отправление, например, после многочасовой перевозки несколько дней без движения, что является недопустимым.
Зарегистрированная тестером транзитного времени диаграмма движение-время может быть обработана на центральной станции, а за счет сравнения заданных величин с действительными можно локализовать возможные задержки при доставке или пересылке, поскольку маршруты и времена перевозки, как правило, известны. Кроме того, известен также контрольный прибор транзитного времени, в состав которого входят запоминающее устройство (ЗУ) для сбора измеренных значений и блок обработки результатов, причем датчик движения, ЗУ для измеренных значений и блок обработки результатов расположены на частично гибкой подложке, по толщине соответствующей толщине μ обычного письма в 5 мм. Этот контрольный прибор транзитного времени выполнен таким образом, что его можно обрабатывать в письмосортирующих машинах, поэтому при измерении жесткости в письмообрабатывающих машинах на почтамтах он не отсортировывается.
Из публикации Markt und Technik N 10 от 9 марта 1979 г., с. 60-62, известны способ и устройство для контроля ударной нагрузки перевозимых грузов с датчиком ускорения, измеренные значения которого запоминаются и подаются в блок обработки. При этом происходит интегрирование сигналов по трем составляющим x, y и z. Интегрированные значения сохраняются в ЗУ. Вспомогательные значения преобразуются в цифровую форму.
Недостаток известных устройств заключается в том, что они позволяют осуществлять лишь детектирование состояний движения и покоя, но не позволяют более точно различать вид движения, фактически возникающий при перемещении, соответственно не позволяют различать используемое транспортное средство.
В основу изобретения положена задача создать устройство и способ для контроля за транзитным временем перевозимых грузов, позволяющие идентифицировать используемые для пересылки транспортные средства и возникающие во время пересылки транспортные события и виды движения.
Эта задача согласно изобретению решается с помощью отличительных признаков пунктов 1 и 14 формулы изобретения. Предпочтительные варианты выполнения изобретения представлены в описании и в зависимых пунктах формулы изобретения.
Согласно одному из предпочтительных вариантов выполнения изобретения в контрольном устройстве с датчиком движения, измеренные значения которого запоминаются и подаются на блок обработки результатов, эти измеренные значения датчика с задаваемой в каждом случае длительностью T цикла преобразуются в цифровую форму и из заданного количества соответственно N измеренных значений определяется заданное число k частотных спектров, после чего производится интегрирование k частотных спектров, а интегрированные частотные спектры запоминаются в ЗУ.
Изобретение также может быть реализовано с применением узкополосового фильтра для определения частотных спектров.
Изобретение позволяет, в частности, производить обработку измеренных значений датчика с экономией энергии и объема памяти.
Согласование чувствительности способа с энергией движения обеспечивается за счет того, что число k частотных спектров, по которому производится интегрирование, уменьшается с ростом энергии движения.
В предпочтительном варианте выполнения изобретения расчет частотного спектра производится лишь в том случае, если энергия движения превышает заданную минимальную энергию Sm движения, благодаря чему можно работать с особенно большой экономией энергии.
Особенно простой мерой энергии движения является сумма величин расстояний между соседними измеренными значениями или разброс соседних измеренных значений в некотором заданном интервале измерений.
С помощью нелинейного сжатия интегрированных спектров достигается дальнейшее уменьшение потребности в объеме памяти.
Адаптация значения минимальной энергии движения при постоянной чувствительности достигается посредством параметрической адаптации.
Оптимальное временное использование имеющейся энергии батареи достигается за счет того, что число k частотных спектров, по которому производится интегрирование, и длительность T цикла регулируются в зависимости от напряжения питания применяемого испытательного устройства, замеренного под нагрузкой датчиком движения.
Чтобы учесть возможную, в частности при низких температурах, потерю емкости применяемой для энергоснабжения батареи, датчик движения при снижении напряжения питания ниже заданного значения отключается и лишь после достижения напряжением питания второго заданного значения снова активируется.
На фиг. 1 изображен интегрированный спектр интенсивности при поездке по выемке отправлений из почтовых ящиков, при автодорожной перевозке, при авиаперевозке и при доставке почтовых отправлений; на фиг. 2 - блок-схема расчета частотных спектров в зависимости от интенсивности; на фиг. 3 - графики различных циклов датчика в зависимости от интенсивности; на фиг. 4 - график изменения напряжения при автоматическом контроле за потреблением мощности; на фиг. 5 - переходы между различными режимами, относящиеся к графику изменения напряжения на фиг. 4.
В предпочтительном варианте выполнения изобретения устройство состоит из датчика ускорения, микроконтроллера со встроенным аналого-цифровым преобразователем и запоминающим устройством, в частности запоминающим устройством с произвольной выборкой (ЗУПВ). Для того, чтобы устройство можно было обрабатывать в письмосортирующих машинах и чтобы при измерении жесткости в письмообрабатывающих машинах на почтамтах оно не отсортировывалось, его предпочтительно выполнить в формате стандартного письма С6. Датчик движения выдает пропорциональный ускорению сигнал, который преобразуется в цифровую форму аналого-цифровым преобразователем (АЦП). В микроконтроллере посредством преобразования Фурье происходит последующее превращение сигнала в частотные спектры, которые в сжатой форме сохраняются в ЗУ. По окончании приема измеренных значений запомненные спектры считываются и обрабатываются. При этом происходит временное сопоставление частотных спектров с временной характеристикой движения устройства во время перевозки. Так как каждое из различных транспортных средств, как, например, автомобильный транспорт, железнодорожный транспорт, пешая доставка, авиатранспорт, характеризуется типичными для него формами спектра, то имеется возможность идентификации протекания процесса перевозки во времени.
На фиг. 1 представлены характерные спектры интенсивности для четырех типов перевозок, а именно для поездки по выемке почтовых отправлений из почтовых ящиков, для автодорожной перевозки, для авиаперевозки и для доставки почтовых отправлений. Наряду с идентификацией транспортного средства, соответственно типа перевозки, спектры позволяют также идентифицировать те или иные происходящие при перевозке события, как, например, отправление, прибытие, изменение скорости и т.д., так как эти события отражаются в определенных характеристиках колебаний транспортного средства, регистрируемых устройством согласно изобретению. Особенно предпочтительным оказалось применение спектров с частотами 8, 16, 24 и 32 Гц.
Ниже более подробно описан один вариант осуществления способа согласно изобретению. Как показано на блок-схеме фиг. 2, способ работает циклически, например, со временами цикла T = 60 с. После начала цикла сначала происходит детектирование на состояние покоя. При транзитном времени для письма в несколько дней на состояние покоя приходится значительная часть всего транзитного времени, которая может составлять от 50 до 95%. Поэтому его распознаванию придается особое значение. Детектирование состояния покоя в принципе можно осуществлять также с помощью обработки спектральных функций, однако детектирование с использованием отдельного метода детектирования или отдельного детектора состояния покоя обладает преимуществом, заключающемся в большей скорости, а в некоторых случаях и в более высокой чувствительности и тем самым меньшей относительно чувствительности потребности в энергии.
В начале цикла включается напряжение питания датчика и происходит задержка до достижения заданного начального значения напряжения датчика. Тем самым учитывается, что датчик достигает заданного режима по экспоненциальной функции с характерной продолжительностью переходного процесса ts. В качестве времени переходного процесса датчика можно выбрать, например, время, которое проходит после подачи напряжения питания на датчик до момента, когда выходное напряжение датчика установится на 1/2 от МЗР (младший значащий разряд) стационарного конечного значения. В передней части кривой переходного процесса происходит детектирование состояния покоя. Детектирование состояния покоя должно происходить по возможности с высокой чувствительностью, чтобы можно было гарантированно распознать состояние движения даже при низких интенсивностях движения. С другой стороны, на этом участке расчет спектральных функций не требуется. Поэтому для детектирования состояния покоя используется вся энергия сигнала датчика. Мерами полной энергии являются разброс (квадрат стандартного отклонения) сигнала датчика в определенном интервале измерений, или также кривизна, т.е. сумма величин расстояний между соседними измеренными значениями в определенном интервале измерений. В последнем случае используется тот факт, что кривизна кривой переходного процесса зависит от степени возбуждения колебаний датчика.
На блок-схеме по фиг. 2 суммирование производится по расстояниям для N дискретных значений:
Состояние покоя предполагается в том случае, когда выполняется неравенство S < Sтн(N).
Чувствительность детектирования движения зависит от того, насколько близко Sтн(N) приближается к S(покой), т.е. абсолютному значению кривизны состояния покоя.
После окончания детектирования на состояние покоя в передней части кривой переходного процесса датчика производится расчет спектральной функции в лежащей за ней части, так что после того, как детектор состояния покоя распознал "движение", спектры определяются в том же самом цикле датчика. В этом случае детектор состояния покоя и расчет спектральной функции должны быть так согласованы одно с другим, чтобы распознанное этим детектором состояние движения подтверждалось как отличный от нуля спектр. Устойчивая работа детектора состояния покоя при высокой чувствительности может быть достигнута автоматической параметрической адаптацией STH(N). Для этого STH(N) разлагается на два члена
STH(N) = Sоп + Sпар;
Sоп представляет собой адаптированное опорное значение порога STH(N), в то время как Sпар является постоянно-параметрической составляющей, которая определяет чувствительность детектирования движения. Адаптация опорного значения Sоп производится после каждого расчета кривизны S путем определения минимального значения из предыдущего значения Sоп и текущего значения S кривизны:
Sоп = min(Sоп,S).
За счет этой параметрической адаптации достигается то, что опорное значение порога STH(N) постоянно оптимально поддерживается на уровне значения кривизны состояния покоя. Взаимосвязь между детектированием на состояние покоя и расчетом спектров обеспечивается за счет того, что для случая, когда спектры в сумме дадут интенсивность, равную 0, после обнаружения движения при детектировании на состояние покоя, опорное значение порога повышается на 1. Этот случай может также наступить, если произошел уход опорного значения порога Sоп вниз или если кратковременное движение имеет место лишь во время детектирования на состояние покоя, а во время последующего периода измерения для расчета спектров никакого движения не происходит. Если в последнем случае опорное значение будет ошибочно увеличено, то при детектировании на состояние покоя в следующем цикле и при относящемся к нему параметрическом отслеживании производится соответствующая коррекция.
После расчета меры энергии S и параметрического отслеживания опорного значения Sоп производится проверка на состояние покоя (шаг 5). При положительном результате этой проверки (на блок-схеме обозначено как "да") напряжение питания датчика отключается. В противном случае ("нет") производится проверка на среднюю интенсивность S > Sср, причем Sср является заданным значением, характеризующим среднюю энергию движения. При отрицательном результате этой проверки ("нет") производится интегрирование по заданному, характерному для низкой интенсивности числу спектров. Затем при положительном результате этой проверки ("да") производится проверка на высокую интенсивность S > Sвыс; при отрицательном результате этой проверки движение классифицируется как среднеинтенсивное, а при положительном результате ("да") как высокоинтенсивное.
В зависимости от того, классифицируется ли интенсивность как малая, средняя или большая, интегрирование производится по большому, среднему или малому числу спектров. Интегрирование по k спектрам по соответственно N дискретным значениям сигнала датчика соответствует усреднению по k спектрам и снижает действие статистических колебаний. Поскольку влияние таких колебаний при небольших интенсивностях выше, соответственно снижается с ростом интенсивности, число собранных спектров может быть уменьшено при увеличении интенсивности. Для малых интенсивностей предпочтительное число спектров, по которому производится интегрирование, составляет k = 80, для средних k = 40 и для больших k = 20.
Поскольку измеренные значения представляют собой дискретизированные во времени сигналы, то предпочтительно работать с формальным математическим представлением дискретного преобразования Фурье, а интегрирование (шаг 11) выполнять в виде накопления. Из формального математического представления дискретного преобразования Фурье следует, что для предпочтительного случая четырех спектральных линий F1, F2, F3, F4 последние всегда состоят соответственно из вещественной и мнимой частей Fm=Rem-Imm, где m=1,...,4. Вещественная и мнимая части Rem и Imm спектральных линий могут быть представлены в этом случае в виде последовательных дискретных значений f0, f1,...,f7 следующим образом:
Re1= F(f0-f4)+Fcos(π/4)(f1+f7-f3-f5)
Im1= F(f2-f6)+Fcos(π/4)(f1+f3-f5-f7)
Re2=F(f0-f2+f4-f6)
Im2=F(f1+f5-f3-f7)
Re3= F(f0-f4)+Fcos(π/4)(f3+f5-f1-f7)
Im3= F(f0-f2)+Fcos(π/4)(f1+f3-f5-f7)
Re4=F(f0+f2+f4+f6-f1- f3-f5-f7)
Im4=0
F представляет собой коэффициент, который необходимо подобрать соответствующим образом, чтобы минимизировать погрешность округления (F ≈ 16).
Спектральное интегрирование (шаг 11) выполняется путем суммирования отдельных спектральных составляющих  соответственно по k спектрам:
соответственно по k спектрам:
При этом целесообразно получить абсолютную величину путем аппроксимации, что можно выполнить без возведения в квадрат и извлечения корня:
Динамическая область интенсивностей имеет порядок 105. Поэтому для уменьшения необходимого для хранения спектров объема памяти спектральные линии предпочтительно подвергнуть нелинейному сжатию (шаг 13) и тем самым уменьшить динамическую область на один порядок, равный 24, что позволит объединить каждые две спектральные линии одним байтом в запоминающем устройстве. В предпочтительном варианте выполнения изобретения сжатие осуществляется посредством представления данных в виде таблицы. При этом значения для таблицы сжатия определяются по степенной функции:
g(n) = AW•bn.
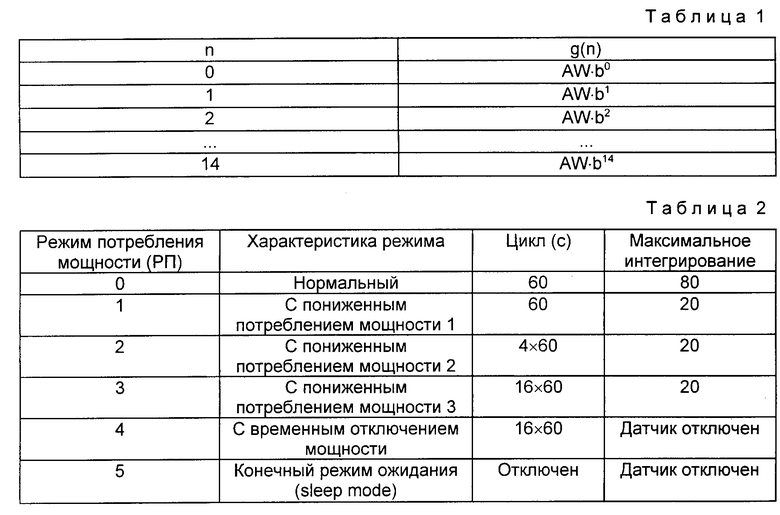
Таким образом получают таблицу сжатия, которая имеет следующий вид (см. табл. 1):
При этом AW представляет собой элемент таблицы с наименьшим значением, который определяет нижний предел чувствительности системы. Элемент таблицы с наибольшим значением имеет абсолютную величину AW•B14. Динамика таблицы сжатия определяется величиной B и может быть рассчитана из AW и AW•B15. После выполнения нелинейного сжатия (шаг 13) спектры запоминаются в запоминающем устройстве (шаг 14), предпочтительно в ЗУПВ.
Как уже упоминалось выше в отношении параметрического отслеживания опорного значения, результат преобразования Фурье предпочтительно связать с опорным значением порога обратной связью, чтобы достичь оптимальной синхронизации порога срабатывания между детектором состояния покоя и преобразованием Фурье. Это параметрическое отслеживание (шаг 15) производится после запоминания спектров в ЗУПВ. После осуществления параметрического отслеживания напряжение питания датчика для этого цикла отключается (шаг 16).
На фиг. 3 изображены три различных цикла датчика, а именно, цикл с высокой интенсивностью, цикл с низкой интенсивностью и цикл с детектированием на состояние покоя (ДП). На чертеже видно, что при высокой интенсивности детектирование на состояние покоя, равно как и преобразование Фурье происходят в переходной области датчика, соответственно напряжения датчика Uдатчика. При низкой интенсивности, при которой интегрирование производится по большему числу измеренных значений, преобразование Фурье происходит в задних частях переходной кривой. Напротив, после выполнения детектирования на состояние покоя напряжение датчика отключается уже непосредственно по окончании ДП.
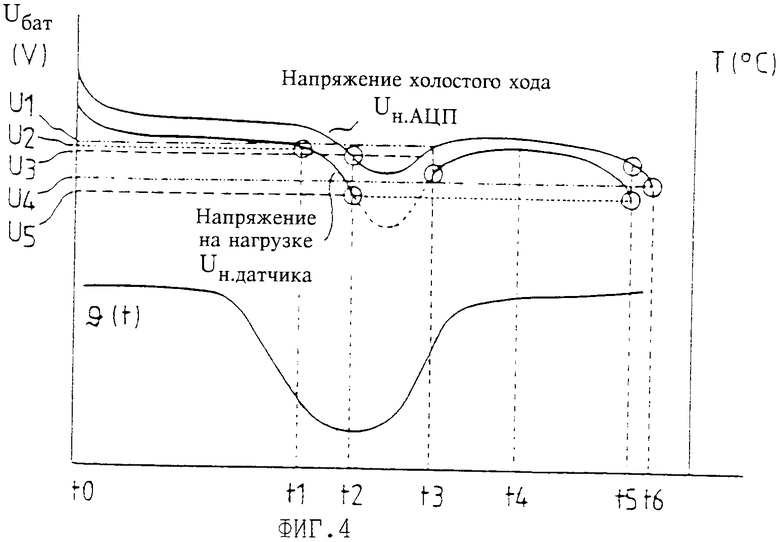
На фиг. 4 показаны напряжение холостого хода батареи, применяемой для энергоснабжения устройства согласно изобретению, и напряжение батареи на нагрузке от датчика Uн.датчика при изменяющейся температуре в зависимости от времени T. Для учета уменьшенной емкости батареи потребление мощности устройства предпочтительно согласовывать с имеющейся в данный момент емкостью, соответственно с замеренными напряжениями. Предпочтительно это достигается за счет того, что количество спектров, по которому производится сумиирование, либо времена циклов, соответственно количество обработанных измеренных значений, либо то и другое согласовываются с емкостью батареи.
В табл. 2 представлено предпочтительное согласование мощностей, зависящее от температуры.
Различным напряжениям соответствуют различные режимы потребления мощности (РП) с различной длиной цикла и количеством спектров, по которым производится интегрирование. В принципе, при согласовании мощности, управляемом температурой, потребление мощности снижается, если напряжение Uн.датчика падает ниже предельного напряжения U2.
На фиг. 4 первоначально замеренное напряжение на нагрузке Uн.датчика больше, чем U2, и устройство работает в нормальном режиме РП0. Мгновенное потребление энергии определяется действительной интенсивностью движения. Время цикла всегда составляет 60 с; в периоды покоя устройство находится в состоянии покоя, при движении предпочтительно рассчитывается полный спектр из 20, 40 или 80 спектров в зависимости от интенсивности движения.
Если Uн.датчика падает ниже U2, то устройство переходит в режим РП1, при котором потребление мощности снижено. Система остается в РП1 до тех пор, пока измеренное напряжение не станет меньше чем U2-dU и не больше чем U2+H. Параметр H при переходе от РП1 к РП0 в качестве гистерезиса будет препятствовать возникновению в системе колебаний.
В орбщем для перехода от одного режима к другому действительны следующие соотношения:
Переход в РП (i + 1), когда Uн < U2 - idU
Переход в РП (i + 1), когда Uн > U2 - (i - 1)dU + H
Если действительное напряжение на нагрузке Uн.датчика падает ниже предельного значения U5, где U5=U2-N•dU, то происходит переход к так называемому режиму с временным отключением мощности (РП4) в момент времени t2. В режиме временного отключения мощности активность датчика прекращается, а остающаяся емкость батареи резервируется для сохранения данных.
В режиме временного отключения мощности кратно обычному времени цикла производится измерение напряжения батареи Uн.АЦП, т.е. при нагрузке не от датчика. Это приводит к тому, что Uн.АЦП больше чем Uн.датчика; ср. фиг. 4 в момент времени t2. С переходом в режим с временным отключением мощности напряжение батареи может восстанавливаться в известных пределах, так как в этом случае она должна дополнительно запитывать лишь небольшую нагрузку. Это может привести к росту напряжения холостого хода, причем это не связано с реальным увеличением емкости батареи. По этой причине переход от режима с временным отключением мощности в режим РП3 происходит лишь тогда, когда измеренное напряжение Uн.АЦП возросло по меньшей мере на величину dUАЦП = U1 - U3. Этот случай изображен на фиг. 4 в момент времени t3. Величину dUАЦП следует рассматривать как параметр.
В конце срока службы батареи нагрузка при измерении напряжения может привести к глубокой посадке напряжения батареи, а тем самым и к опасности, заключающейся в невозможности накопления данных. Поэтому в случае, когда измеренное напряжение батареи в режиме с временным отключением мощности упадет ниже определенного порогового значения U4, произойдет переход в необратимый режим ожидания РП5. От этого режима ожидания не существует никакого перехода к другому режиму потребления мощности, а также не регистрируется время.
На фиг. 5 графически представлены переходы между режимами при автоматически согласованном потреблении мощности устройством согласно изобретению.



Устройство и способ предназначены для контроля времени от отправки перевозимых грузов до момента доставки адресату. Движение перевозимых грузов регистрируется контрольным устройством с датчиком ускорения. Измеренные значения запоминаются и подаются на блок обработки. Во время задаваемой в каждом случае длительности T цикла для заданного количества соответствующих N измеренных значение определяют заданное количество K частотных спектров. Производят интегрирование K частотных спектров. Интегрированные частотные спектры вводят в запоминающее устройство для хранения. Обеспечивается идентифицирование используемых для перевозки грузов транспортных средств, видов движения и возникающих при перевозке транспортных событий. 2 с. и 15 з.п. ф-лы, 5 ил. 2 табл.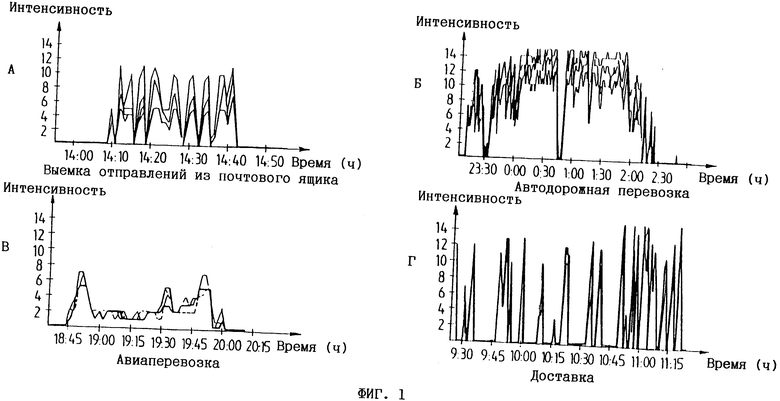
Sоп = min (Sоп, S),
где Sоп - опорное значение;
S - текущее значение кривизны.
| DE 3643203 A, 30.06.88 | |||
| DE 4110891 A, 10.10.91 | |||
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |

